
Multi-Automated Guided Vehicles Conflict-Free Path Planning for Packaging Workshop Based on Grid Time Windows
Abstract
:1. Introduction
Research Scene
2. Single-AGV Path Planning Algorithm
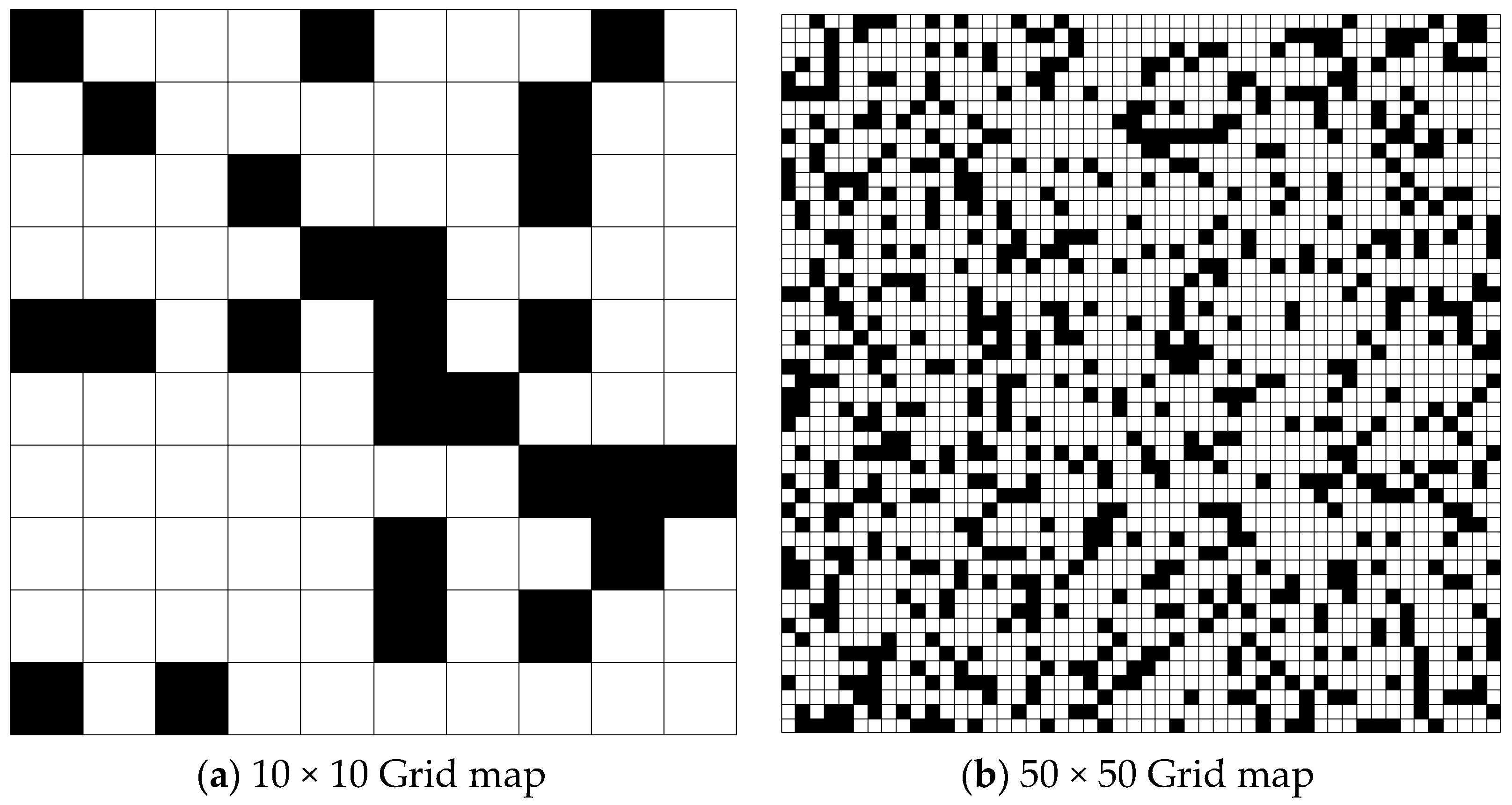
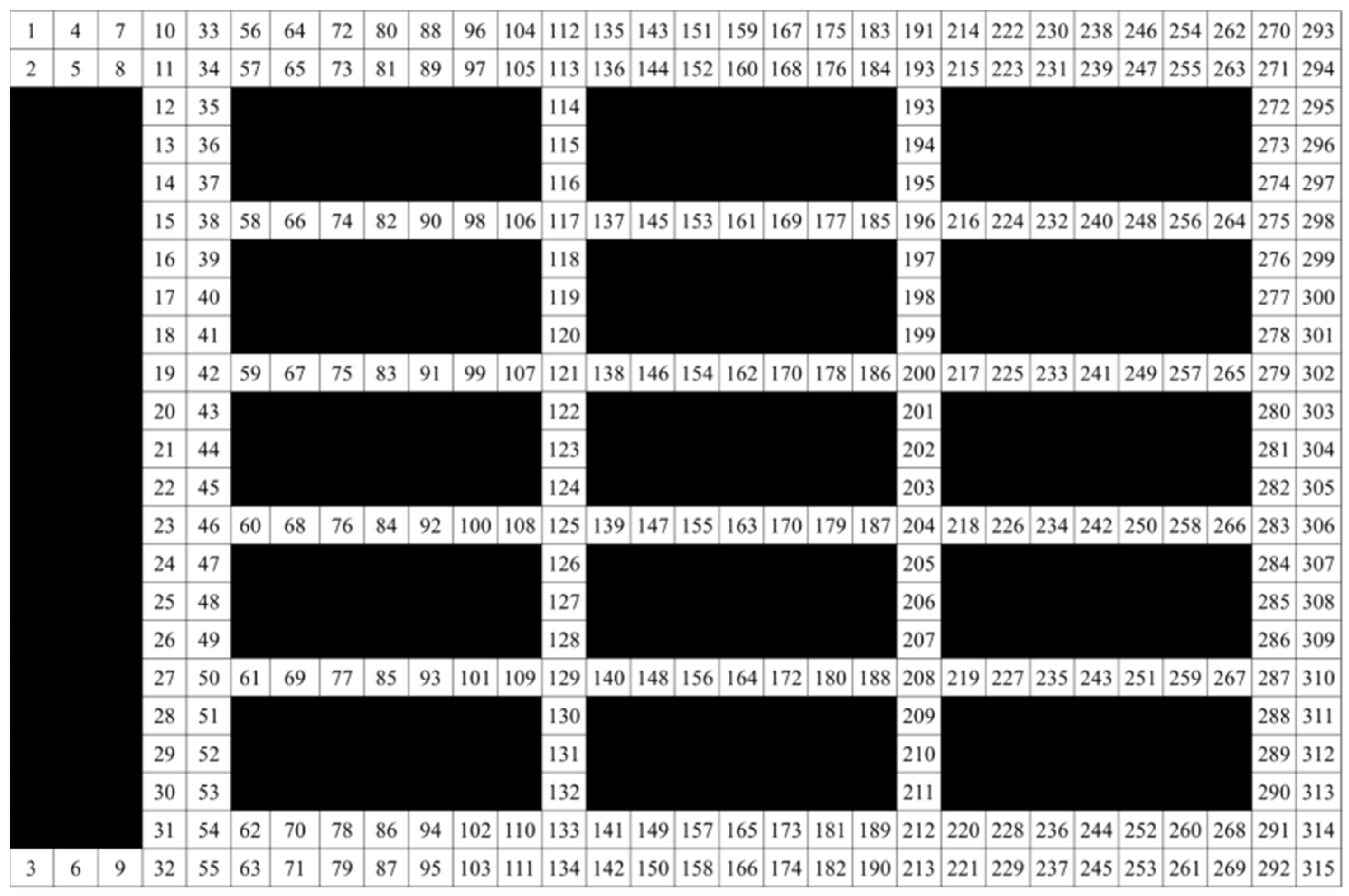
2.1. Grid Map
2.2. Improved A* Algorithm
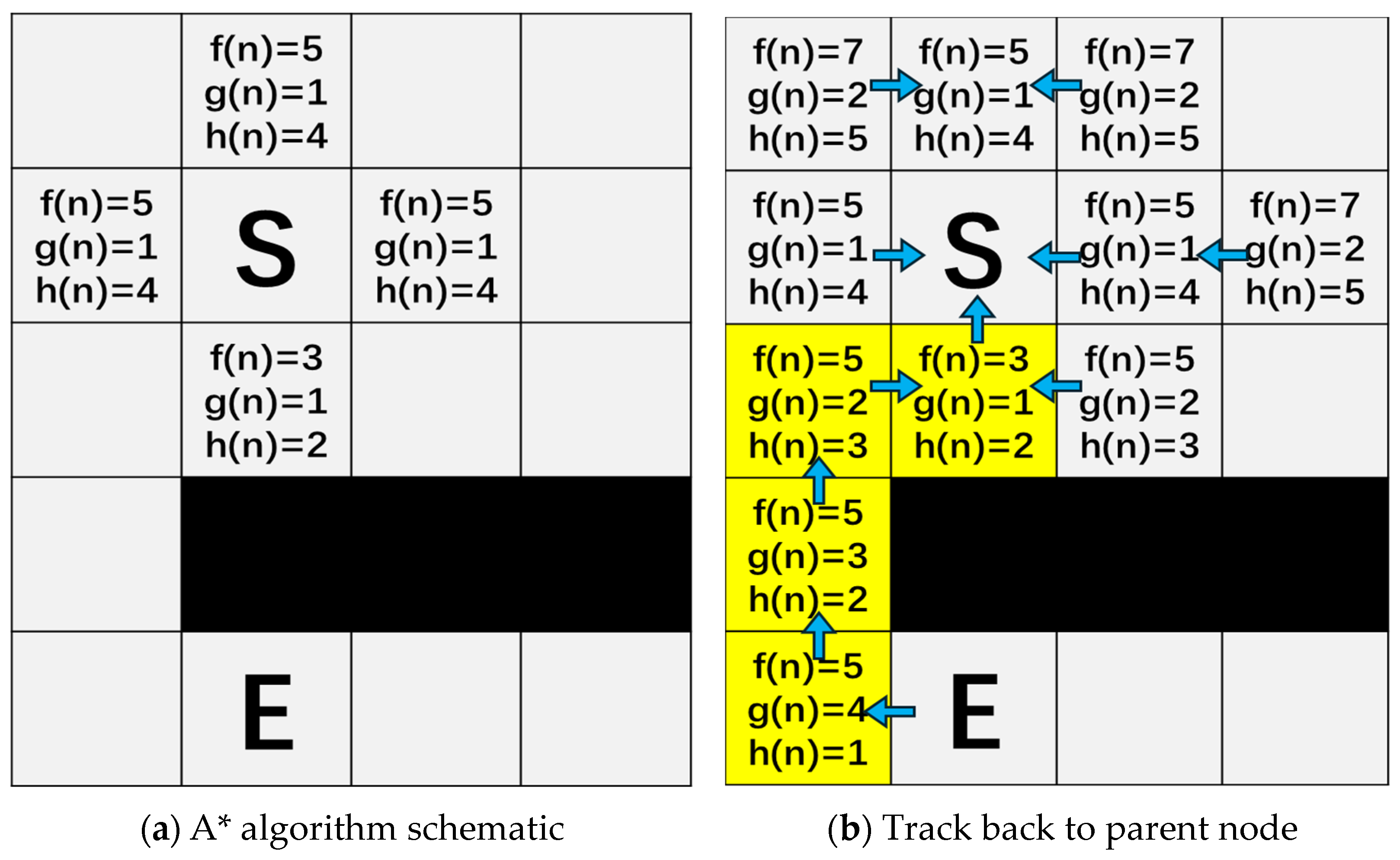
2.2.1. Traditional A* Algorithm
- The AGV loading and unloading time is set to 1 s;
- AGV will not collide with obstacle grids.
2.2.2. Adding the A* Algorithm of the Turn Penalty Function
3. Multi-AGV Path Planning Based on Time Window
3.1. The Time Window Method
3.2. Types and Handling Strategies of Multiple AGV Path Conflicts
- (1)
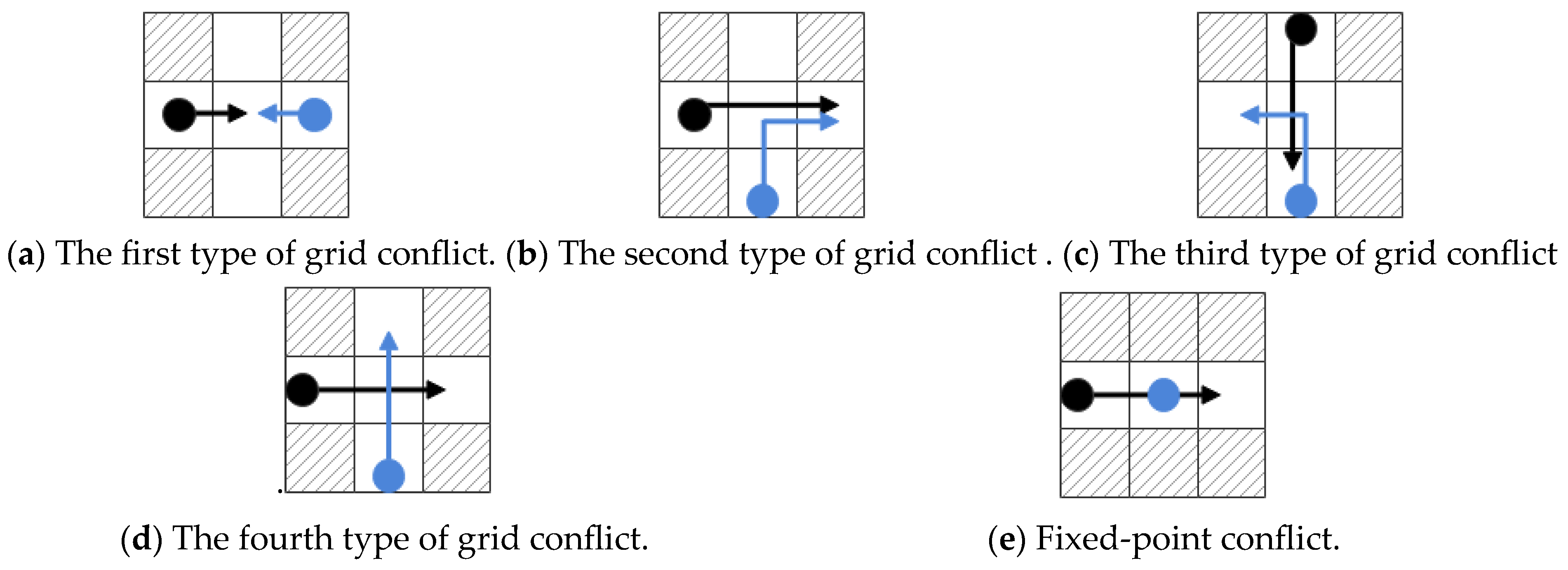
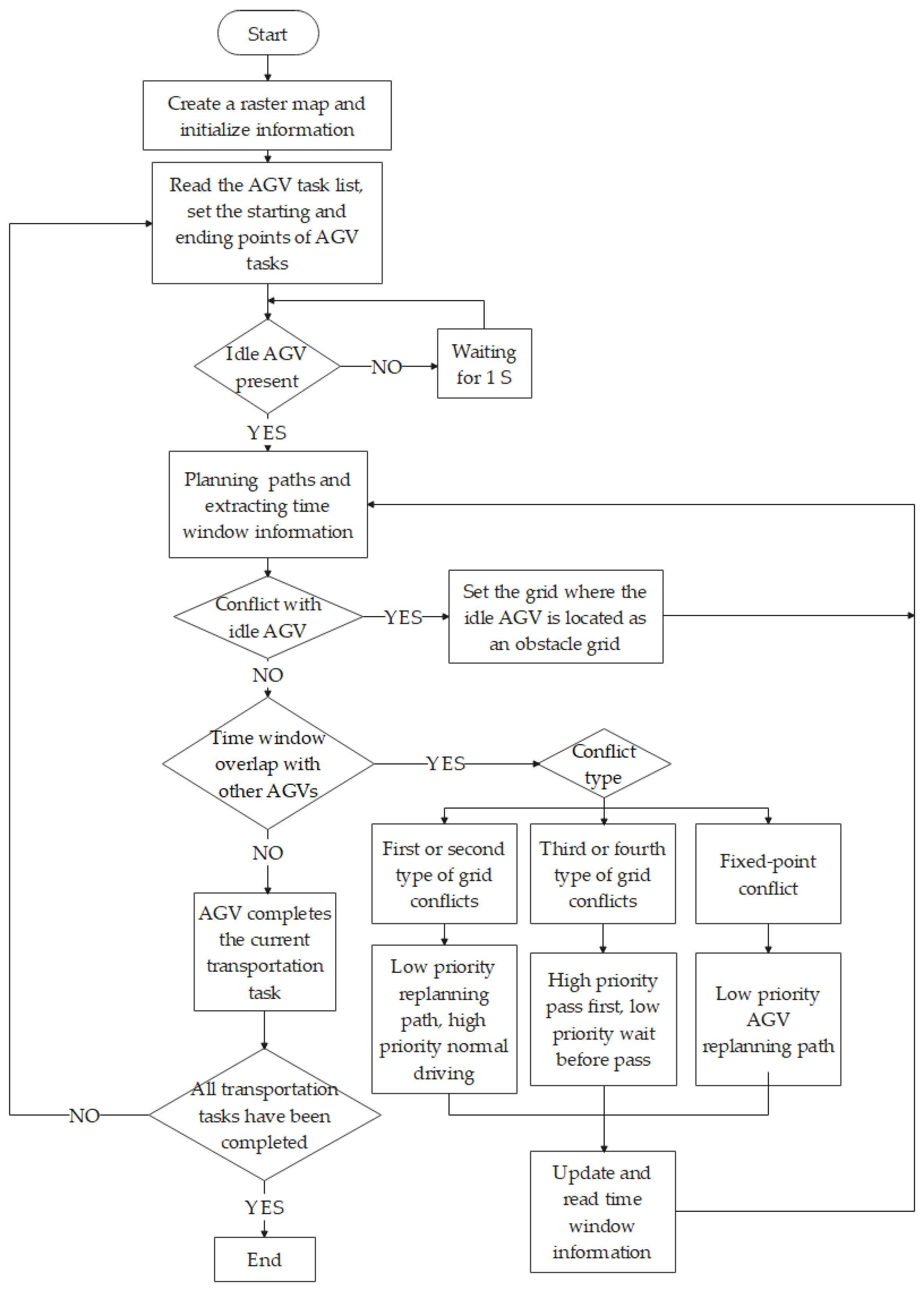
- Grid conflict occurs when two or more AGVs meet at the same grid location at the same time. There are roughly four types of grid conflicts, as shown in Figure 6a–d. The first and second types of grid conflicts have overlapping AGV transportation paths, and it is necessary to redefine the AGV path to avoid the occurrence of conflicts. The third and fourth types of grid conflicts can be avoided by determining the priority order of traffic, as there are no overlapping transportation paths outside the conflicting grid cell;
- (2)
- Fixed-point conflict occurs when the AGV is loading and unloading goods or experiencing sudden malfunctions, and the position of the AGV does not change in a short period of time. When other AGVs pass through the grid cell, fixed point conflict occurs, as shown in Figure 6e. At this point, it is necessary to set the fixed-point grid cell as an obstacle cell and replan the path of the AGVs to avoid conflicts.
- (1)
- Replan the path scheme: When there is a conflict between the first and second types of grids, the AGV with higher priority maintains its original path scheme through the grid. The AGV with low priority sets the conflict grid cell as an obstacle cell in the grid graph, starts from the current position, replans the route, and drives according to the new path scheme.
- (2)
- AGV waiting scheme: When conflicts occur between the third and fourth types of grids, the AGV with higher priority maintains the original path scheme through the grid. The low-priority AGV waits in place, and after the high-priority AGV passes, it passes through the conflict grid cell according to the original path plan.
3.3. Multi-AGV Conflict Determination Based on Time Window
3.4. Multi-AGV Priority Design
3.5. Multi-AGV Path Planning Algorithm Based on Time Window
4. Algorithm Test and AGV Quantity Analysis
4.1. Single AGV Path Planning Simulation
4.2. Planning Paths for Multi-AGV
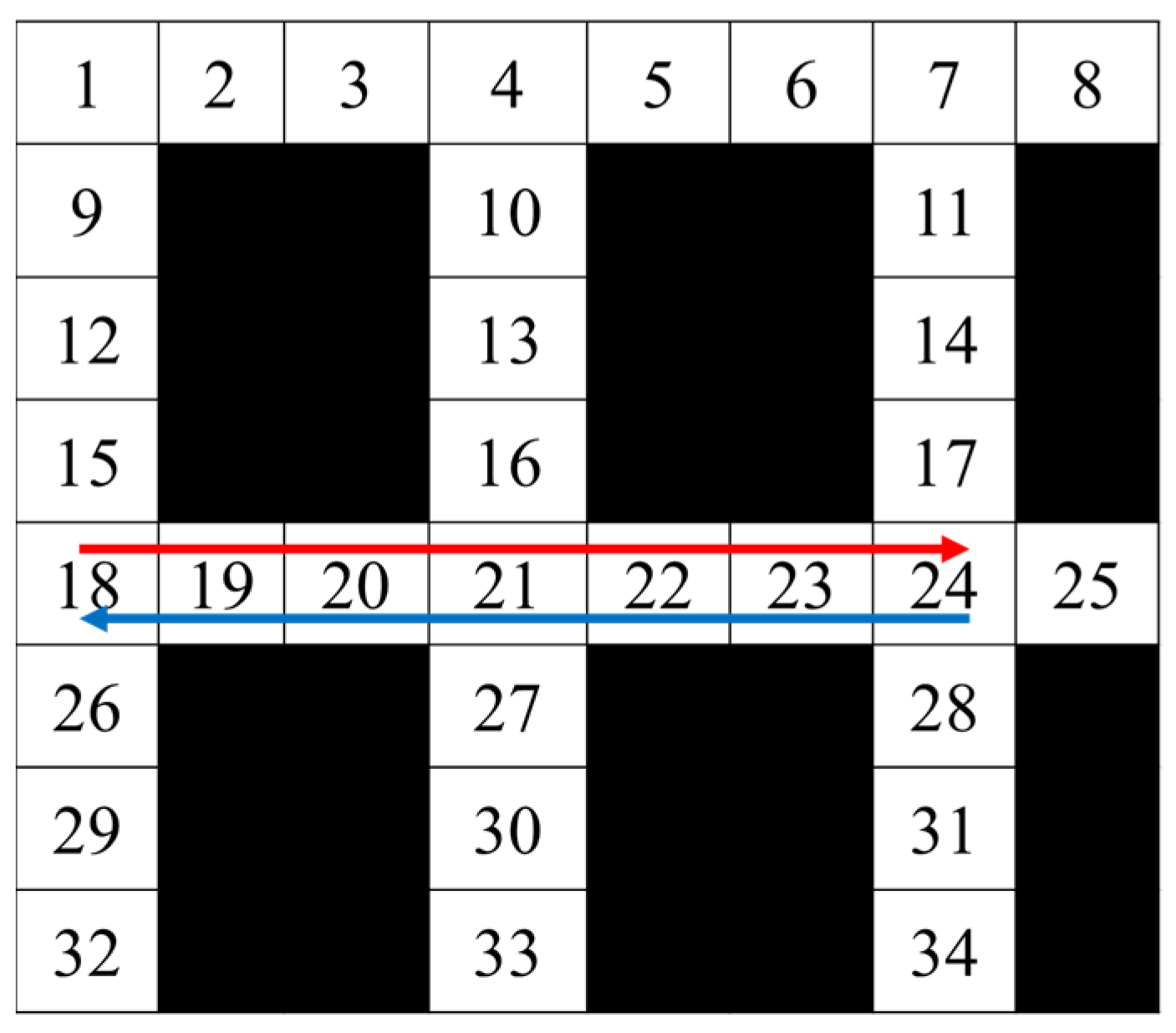
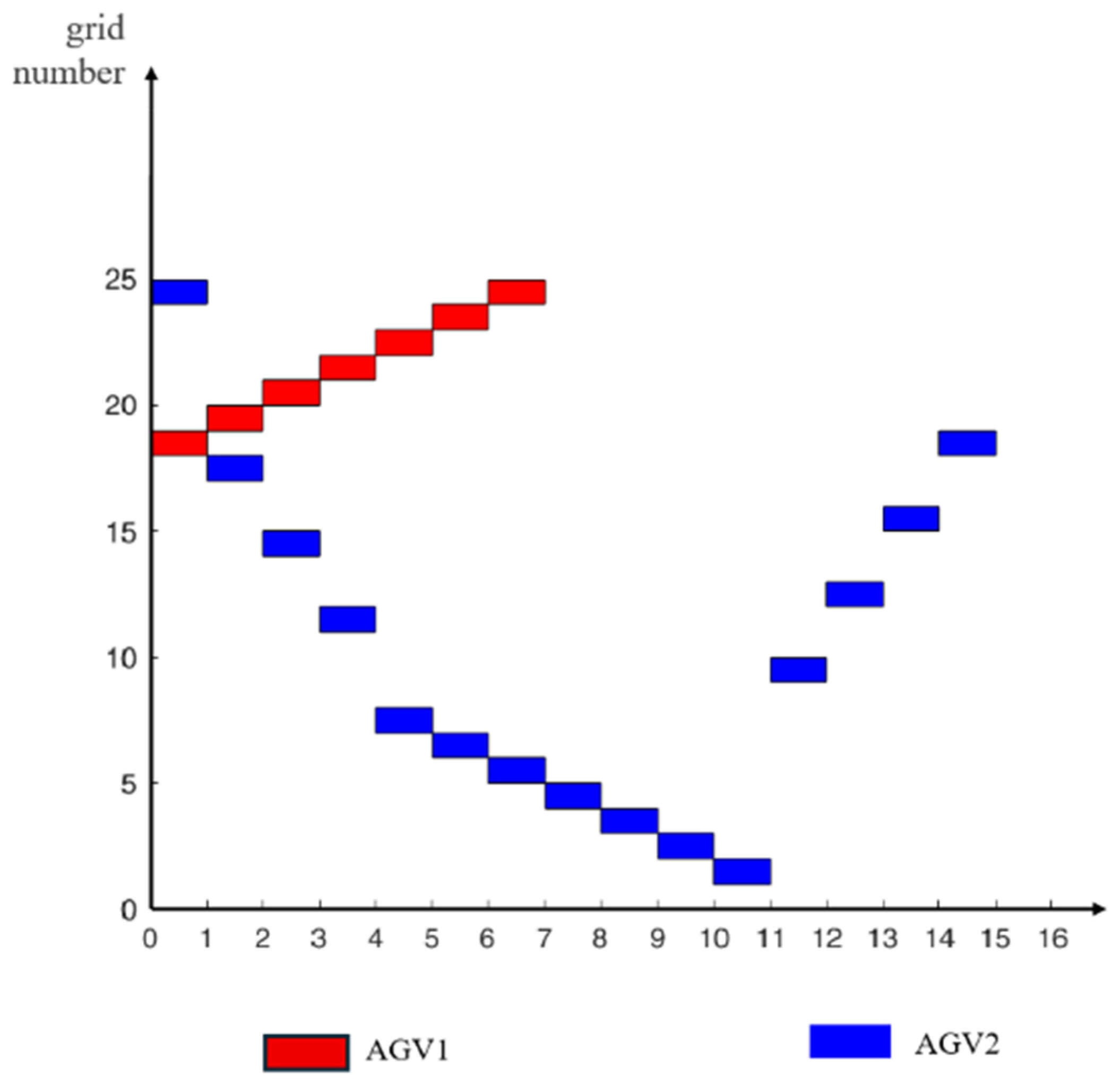
- (1)
- Replanning the path scheme in a conflict where two AGVs arrive at the same grid cell at the same time. The route of AGV1 is 18-24, as shown in the red route in Figure 8; the route of AGV2 is 24-18, as shown in the blue route in Figure 7. The arrows in Figure 8 indicate the direction of each AGV. Both AGVs departed at 0 s, and both AGVs simultaneously reached the cell numbered 21 at 3 s and collided.
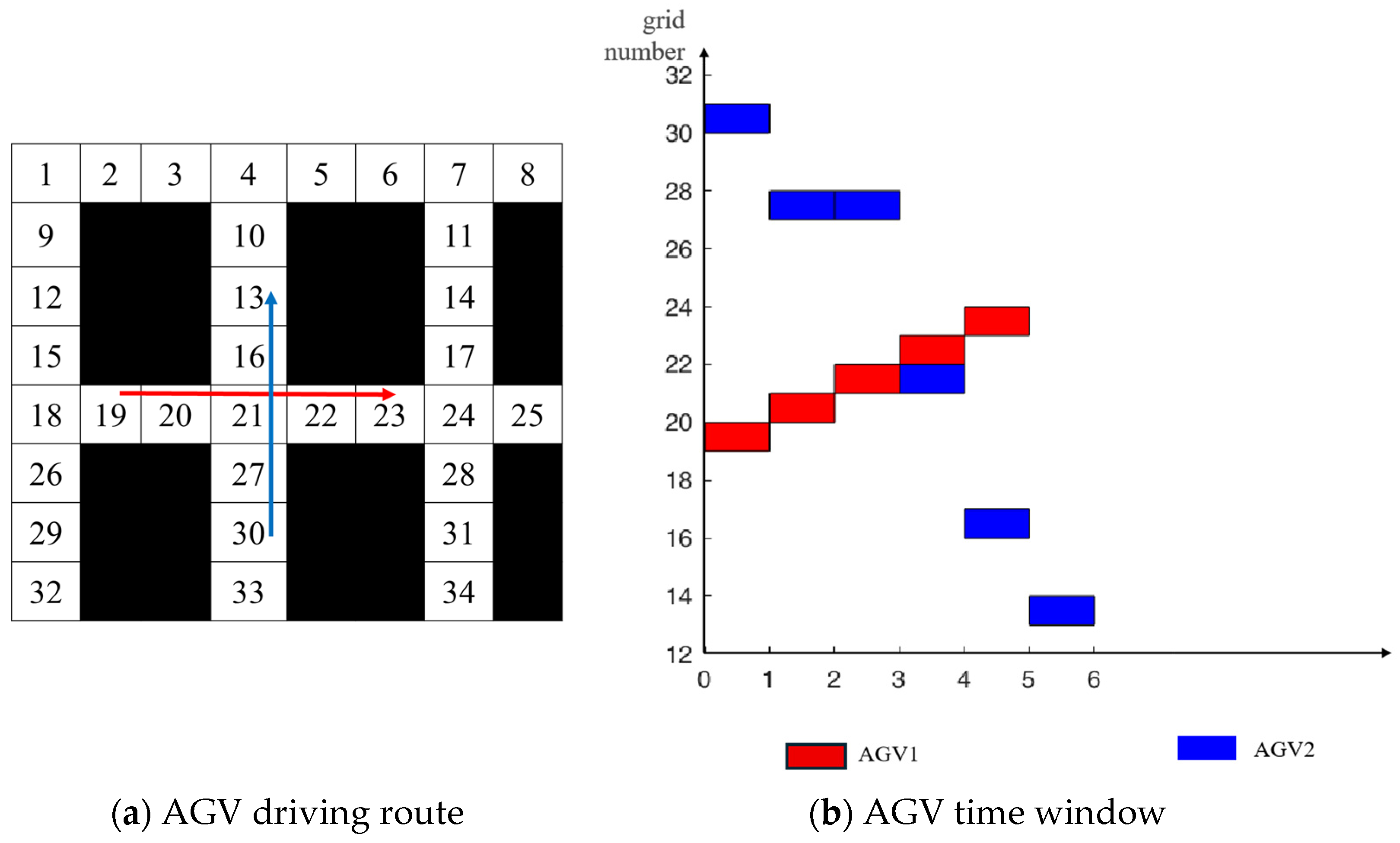
- (2)
- For the AGV executing the waiting scheme, as shown in Figure 10a, the route of AGV1 is 19-23, as shown in the red route, and the route of AGV2 is 30-13, as shown in the blue route. The arrow indicates the direction of each AGV. When a conflict occurs, AGV2 waits for AGV1 to pass through cell 21 before following its route. The AGV travel time window after mitigation is shown in Figure 10b.
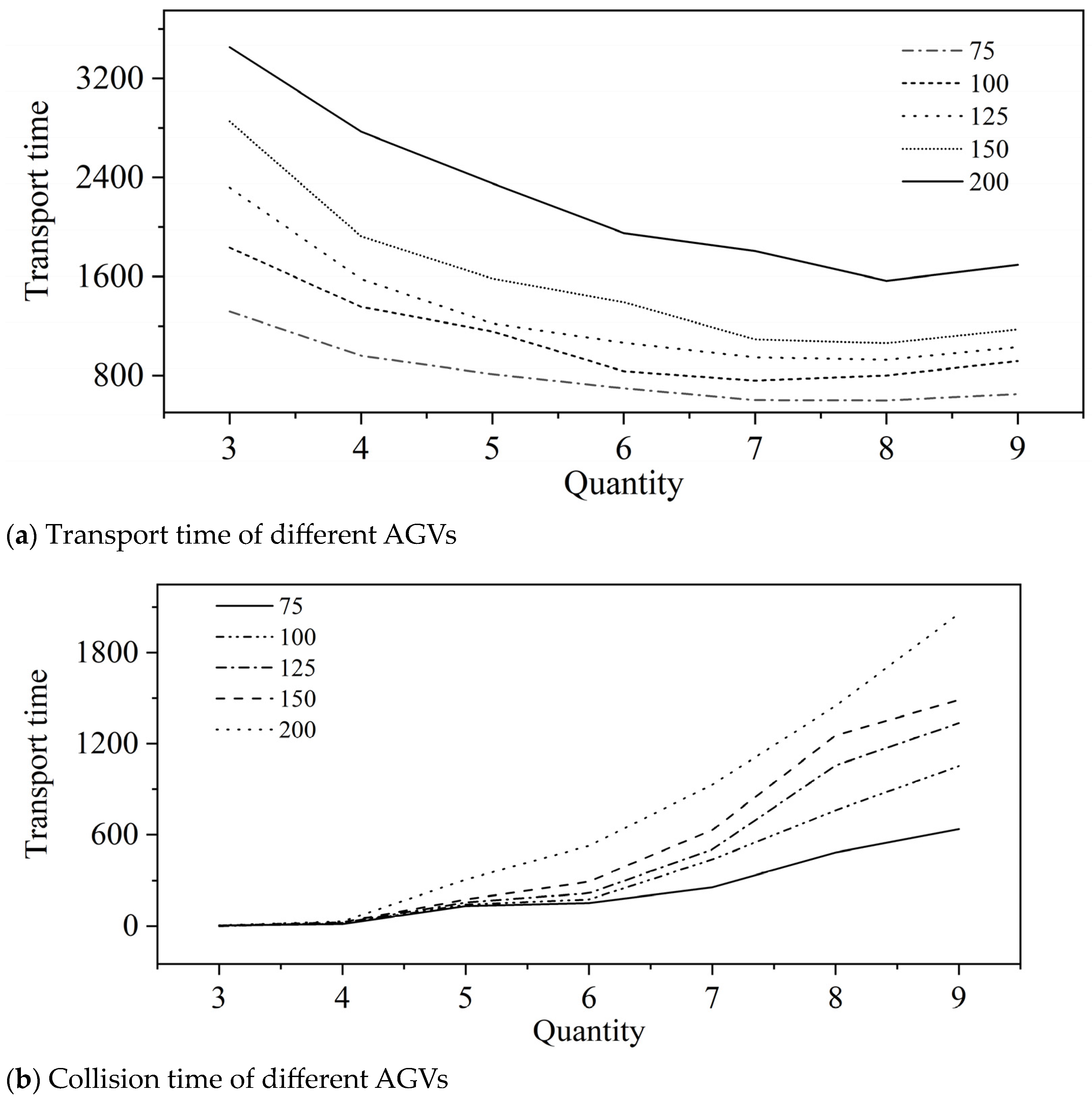
4.3. AGV Quantity Analysis of Packaging Workshop
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Hu, B.; Seragiotto, C.; Prandtstetter, M.; Binder, B.; Bader, M. Guiding Autonomous Vehicles Past Obstacles–Theory and Practice. In Proceedings of the Computer Aided Systems Theory–EUROCAST 2019: 17th International Conference, Las Palmas de Gran Canaria, Spain, 17–22 February 2019; Revised Selected Papers, Part I 17. Springer International Publishing: Cham, Switzerland, 2020; pp. 271–278. [Google Scholar]
- Li, Z.; Liu, Y. Job shop scheduling considering multiple AGVs with charging. Comput. Integr. Manuf. Syst. 2021, 27, 2872–2879. [Google Scholar] [CrossRef]
- Fu, B.; Chen, L.; Zhou, Y.; Zheng, D.; Wei, Z.; Dai, J.; Pan, H. An improved A* algorithm for the industrial robot path planning with high success rate and short length. Robot. Auton. Syst. 2018, 106, 26–37. [Google Scholar] [CrossRef]
- He, J.; Li, P.; Shen, Y. Research on obstacle avoidance trajectory planning of AGV with moving obstacle. J. Chongqing Univ. Technol. 2022, 36, 135–143. [Google Scholar]
- Gbadamosi, O.A.; Aremu, D.R. Design of a Modified Dijkstra’s Algorithm for finding alternate routes for shortest-path problems with huge costs. In Proceedings of the International Conference in Mathematics, Computer Engineering and Computer Science (ICMCECS), Lagos, Nigeria, 18–21 March 2020. [Google Scholar]
- Meng, G.; Chen, X.; Tao, X.; Zhang, W. AGV Path Planning Based on Hybrid Ant Colony Algorithm. Modul. Mach. Tool Autom. Manuf. Tech. 2021, 1, 70–73. [Google Scholar] [CrossRef]
- Xu, L.; Liu, Y.; Wang, Q. Application of adaptive genetic algorithm in robot path planning. Comput. Eng. Appl. 2020, 56, 36–41. [Google Scholar]
- Wang, H.; Qin, G.; Yang, C. AGV Path Planning of Customized Furniture Plate Transportation. Packag. Eng. 2021, 42, 203–209. [Google Scholar] [CrossRef]
- Niu, Q.Y.; Li, M.F.; Zhao, Y. Research on improved artificial potential field method for AGV path planning. Mach. Tool Hydraul. 2022, 50, 19–24. [Google Scholar]
- Chen, D.; Liu, X.; Liu, S. Improved A*algorithm based on two-way search for path planning of automated guided vehicle. J. Comput. Appl. 2021, 41, 309–313. [Google Scholar]
- Deng, X.; Hu, X.; Jiang, D.; Peng, Z. A hybrid GA approach to the scheduling of machines and automated guided vehicles in flexible job shops. J. Sichuan Univ. (Nat. Sci. Ed.) 2021, 58, 73–82. [Google Scholar] [CrossRef]
- Liu, C.; Peng, T. Improved time window path planning for large-scale AGVs. Appl. Res. Comput. 2019, 40, 52–56. [Google Scholar] [CrossRef]
- Guo, T.; Sun, Y.; Liu, Y.; Liu, L.; Lu, J. An Automated Guided Vehicle Path Planning Algorithm Based on Improved A* and Dynamic Window Approach Fusion. Appl. Sci. 2023, 13, 10326. [Google Scholar] [CrossRef]
- Kong, H.; Sheng, Y. Research on AGV path planning based on improved A∗algorithm. Mod. Eng. 2021, 10, 60–64. [Google Scholar] [CrossRef]
- Han, Z.; Wang, D.; Liu, F.; Zhao, Z. Multi-AGV path planning with double-path constraints by using an improved genetic algorithm. PLoS ONE 2017, 12, e0181747. [Google Scholar] [CrossRef] [PubMed]
- Fan, H.; Mu, S.; Yue, L. Collaborative optimization of automated guided vehicle scheduling and path planning considering conflict and congestion. J. Comput. Appl. 2022, 42, 2281–2291. [Google Scholar]
- Yu, H.; Bai, H.; Li, C. Research and simulation of path planning for warehouse multi-AGV system. Comput. Eng. Appl. 2020, 56, 233–241. [Google Scholar]
- Yuan, Y.; Ye, F.; Lai, Y.Z.; Zhao, Y. Multi-agv path planning combined with load balancing and A* algorithm. Comput. Eng. Appl. 2020, 56, 251–256. [Google Scholar]
- Deng, X.; Hu, X.B.; Jiang, D.Y. Flexible job shop machine and AGV planning based on hybrid genetic algorithm. J. Sichuan Univ. (NSE) 2021, 58, 73–82. [Google Scholar] [CrossRef]
- Tian, S.; Fan, L. Multi-agv path planning for express distribution center under dynamic priority strategy. Comput. Eng. Appl. 2019, 59, 275–284. [Google Scholar]
- Yang, Y.; Zhong, M.; Dessouky, Y.; Postolache, O. An integrated scheduling method for AGV routing in automated container terminals. Comput. Ind. Eng. 2018, 126, 482–493. [Google Scholar] [CrossRef]
- Prandtstetter, M.; Seragiotto, C. Towards system-aware routes. In Proceedings of the International Conference on Computer Aided Systems Theory, Las Palmas de Gran Canaria, Spain, 19–24 February 2017; Springer International Publishing: Cham, Switzerland, 2017; pp. 291–298. [Google Scholar]
- Yuan, Z.; Yang, Z.; Lv, L.; Shi, Y. A Bi-Level Path Planning Algorithm for Multi-AGV Routing Problem. Electronics 2020, 9, 1351. [Google Scholar] [CrossRef]
- Zhao, J.; Meng, C.; Wang, X.; Hao, C.; Li, R.; Liu, H.; Wang, Z. Modeling and Analysis of AGV Grid Method Based on Feature Points Extraction. Comput. Eng. Appl. 2022, 58, 156–167. [Google Scholar]
- Wang, Y.; Cao, X.; Guo, X. Warehouse AGV path planning method based on improved A* algorithm and system short-term. Comput. Integr. Manuf. Syst. 2023, 29, 3897–3908. [Google Scholar] [CrossRef]
- Zhang, Y. AGV Path Planning Based on Improved Astar Algorithm. Inf. Comput. 2022, 34, 67–70. [Google Scholar]
- Yang, J.; Tian, Z.; Liu, G. Collision-Free Path Planning for Multiple AGVs in Logistics Center. Mach. Des. Manuf. 2022, 08, 271–277, 281. [Google Scholar] [CrossRef]
- Xu, L.; Huang, B.; Zhong, H. Time Window Model and Algorithm witt AGV System Path Planning. J. Guangxi Norm. Univ. (Nat. Sci. Ed.) 2019, 37, 1–8. [Google Scholar] [CrossRef]
- Li, K.; Liu, T.; He, B.; Xu, D. A Study on Routing and Scheduling of Automated Guided Vehicle in “Cargo-to-Picker” System. Chin. J. Manag. Sci. 2022, 30, 240–251. [Google Scholar] [CrossRef]
- Jiang, C.K.; Li, Z.; Pan, S.B.; Wang, Y. Collision-free path planning for AGVs based on improved Dijkstra algorithm. Comput. Sci. 2020, 47, 272–277. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Total Path Length with 20% | Total Turns Times with 20% | Total Path Length with 30% | Total Turns Times with 30% | |
|---|---|---|---|---|
| A* algorithm | 1412 | 449 | 1458 | 574 |
| Improved A* algorithm | 1412 | 285 | 1458 | 396 |
| Transportation Time | AGV Quantity | ||||||
|---|---|---|---|---|---|---|---|
| 3 | 4 | 5 | 6 | 7 | 8 | 9 | |
| 75 | 1318 | 960 | 812 | 697 | 601 | 598 | 650 |
| 3 | 14 | 133 | 152 | 255 | 483 | 637 | |
| 100 | 1834 | 1355 | 1157 | 835 | 759 | 801 | 917 |
| 2 | 16 | 142 | 176 | 437 | 761 | 1053 | |
| 125 | 2319 | 1581 | 1221 | 1065 | 947 | 927 | 1031 |
| 0 | 21 | 156 | 217 | 503 | 1057 | 1336 | |
| 150 | 2853 | 1925 | 1583 | 1393 | 1092 | 1062 | 1173 |
| 3 | 25 | 175 | 293 | 631 | 1255 | 1489 | |
| 200 | 3455 | 2771 | 2352 | 1951 | 1807 | 1565 | 1695 |
| 5 | 31 | 307 | 527 | 930 | 1449 | 2057 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, G.; Li, M.; Gao, Q. Multi-Automated Guided Vehicles Conflict-Free Path Planning for Packaging Workshop Based on Grid Time Windows. Appl. Sci. 2024, 14, 3341. https://doi.org/10.3390/app14083341
Yang G, Li M, Gao Q. Multi-Automated Guided Vehicles Conflict-Free Path Planning for Packaging Workshop Based on Grid Time Windows. Applied Sciences. 2024; 14(8):3341. https://doi.org/10.3390/app14083341
Chicago/Turabian StyleYang, Guopeng, Meiyan Li, and Qin Gao. 2024. "Multi-Automated Guided Vehicles Conflict-Free Path Planning for Packaging Workshop Based on Grid Time Windows" Applied Sciences 14, no. 8: 3341. https://doi.org/10.3390/app14083341