
Comprehensive Stable Control Strategy for a Typical Underactuated Manipulator Considering Several Uncertainties



Abstract
1. Introduction
- Partial manipulator actuator damage [17].
- The dynamic model of the planar system is established, and the target attitude angle corresponding to the position of the endpoint of the system is obtained by using DE algorithm.
- Based on the nilpotent approximation method, the planar system is reduced to a PVP, and the control process is divided into two stages.
- In the first stage, the controller is designed according to the Lyapunov method to realize the control target of the active joint. In the second stage, the iterative control method is used to realize the stable control of the planar virtual Pendubot, that is, the control target of the passive joint is realized.
- The method proposed in this paper can overcome the effects of non-zero initial velocity and initial torque disturbance; it is verified by simulation experiments.
2. Preliminaries
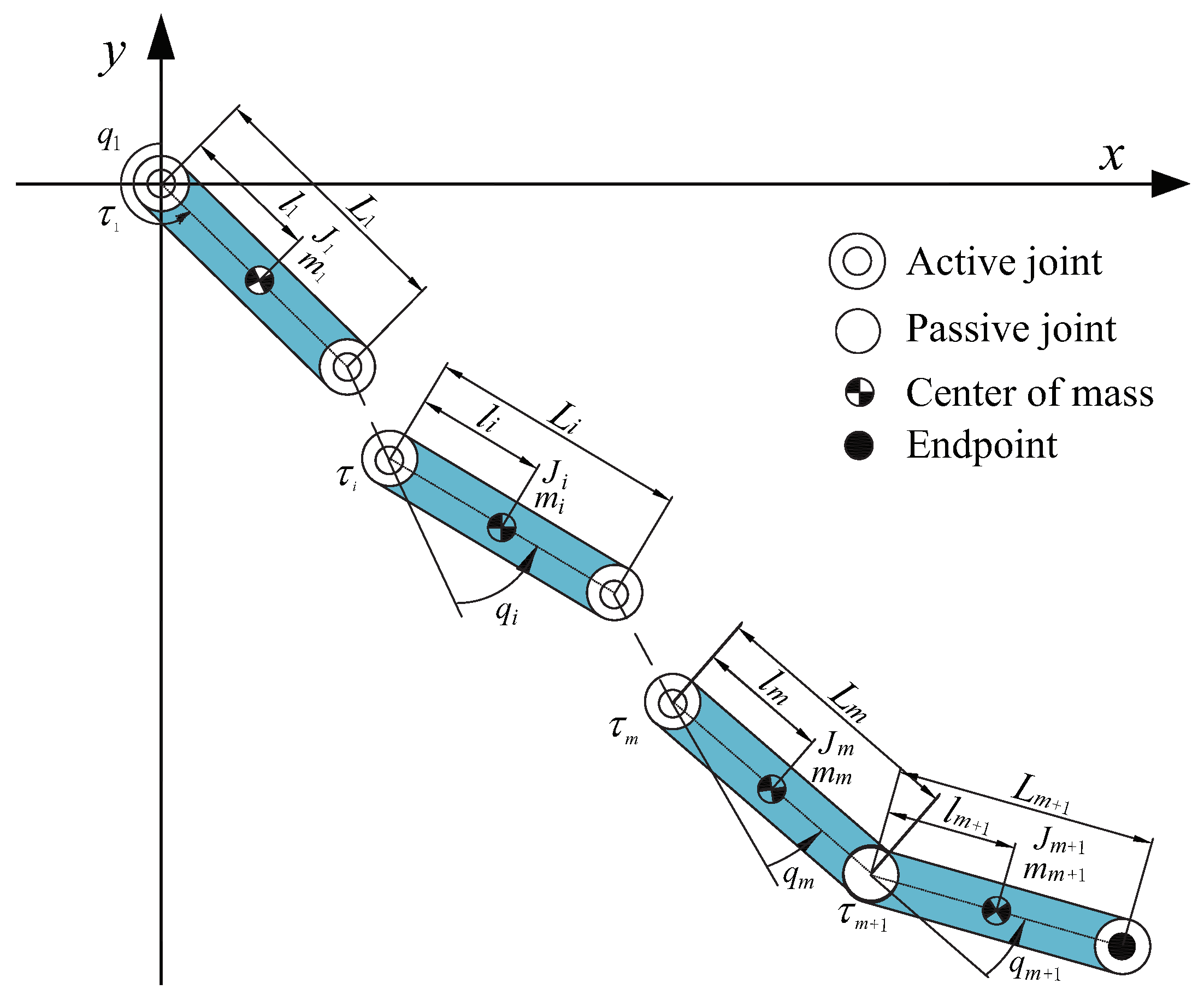
2.1. Dynamic Model
| Algorithm 1 Differential evolution algorithm |
|
2.2. Degradation of the Original System Model
2.3. System Control Idea
- Stage 1: Degradation of the original system model
- Stage 2: Stable control for all links
3. Controllers Design
3.1. Controllers Design for Stage 1
3.2. Controllers Design for Stage 2
| Algorithm 2 Iterative control algorithm |
|
4. Simulation
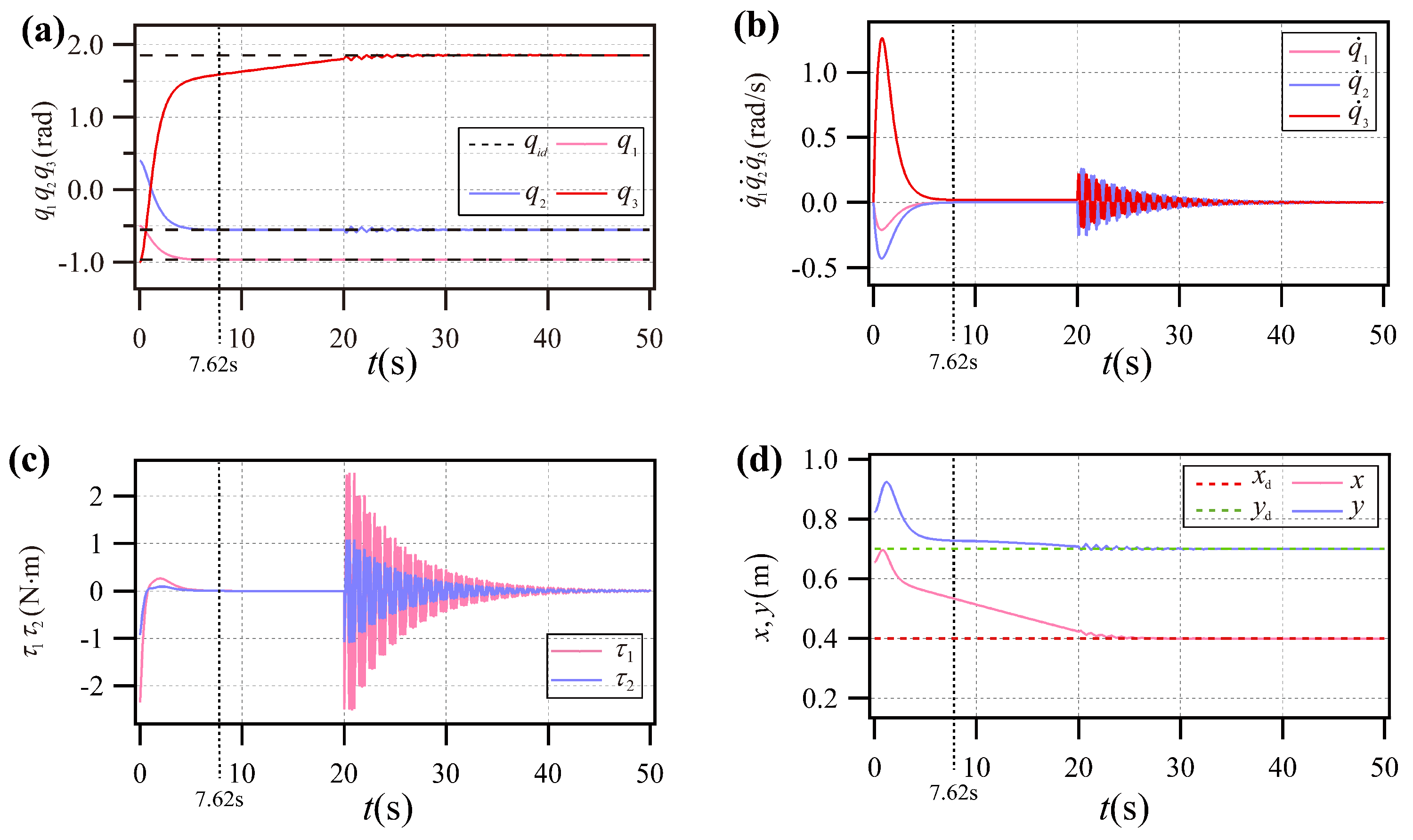
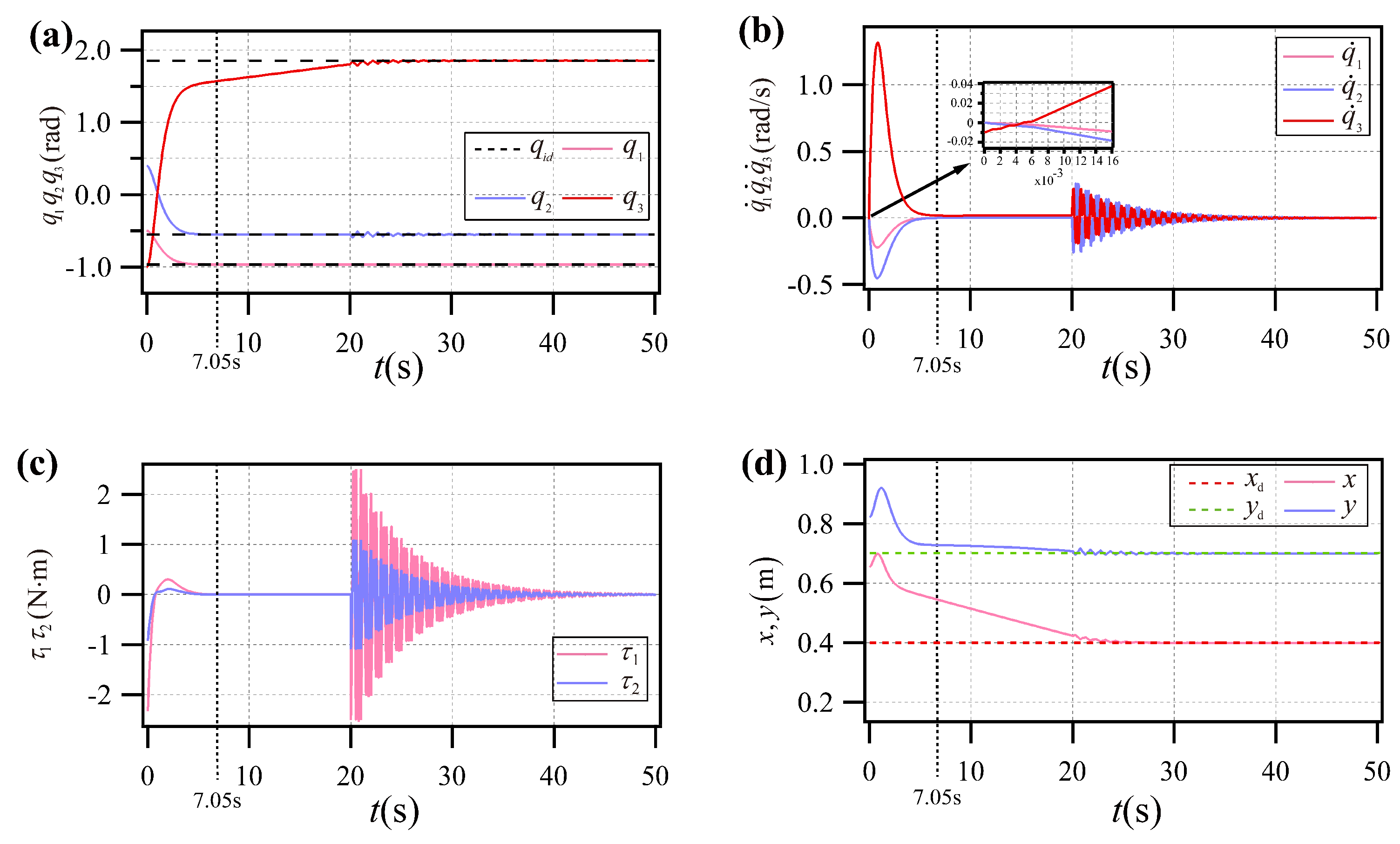
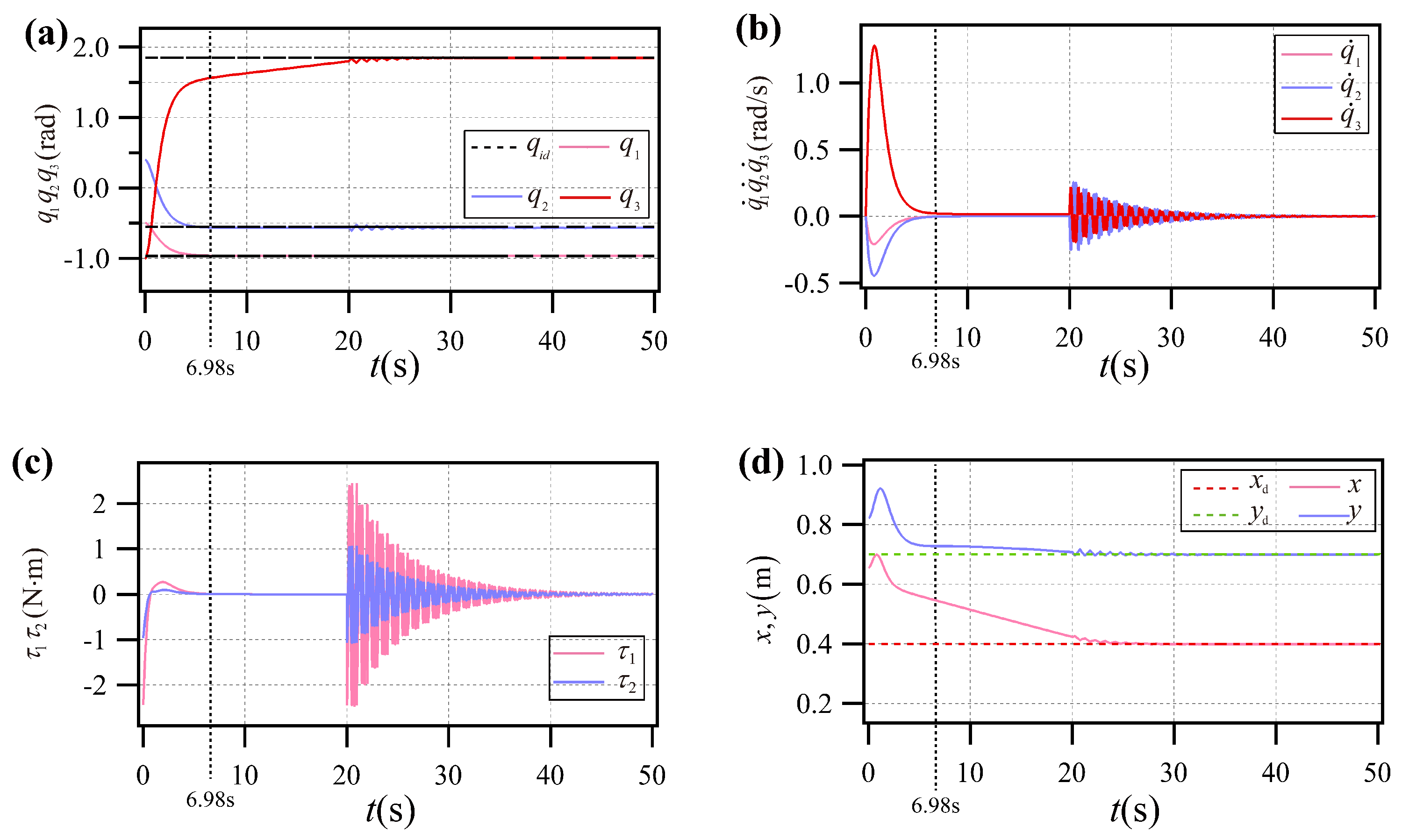
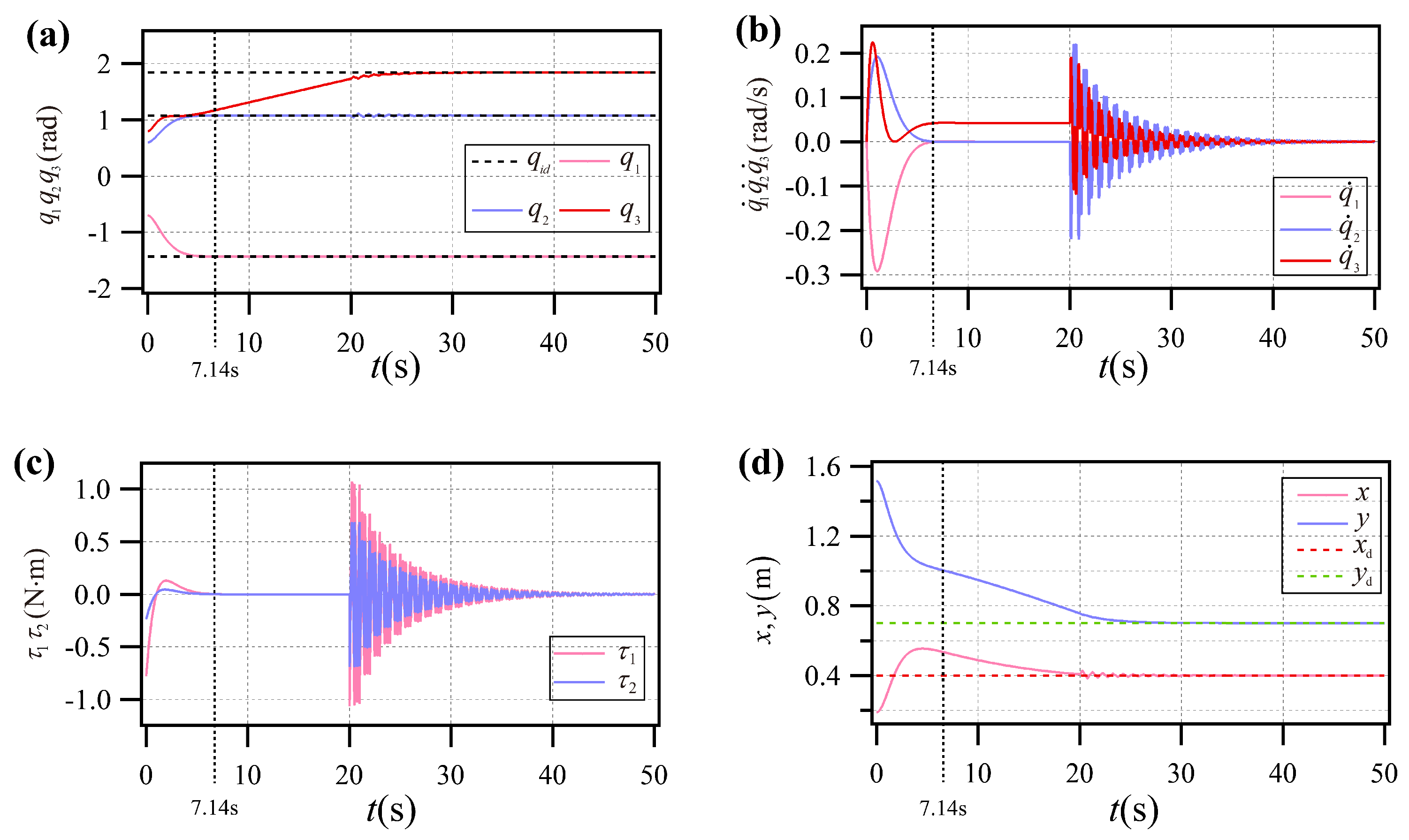
4.1. AAP
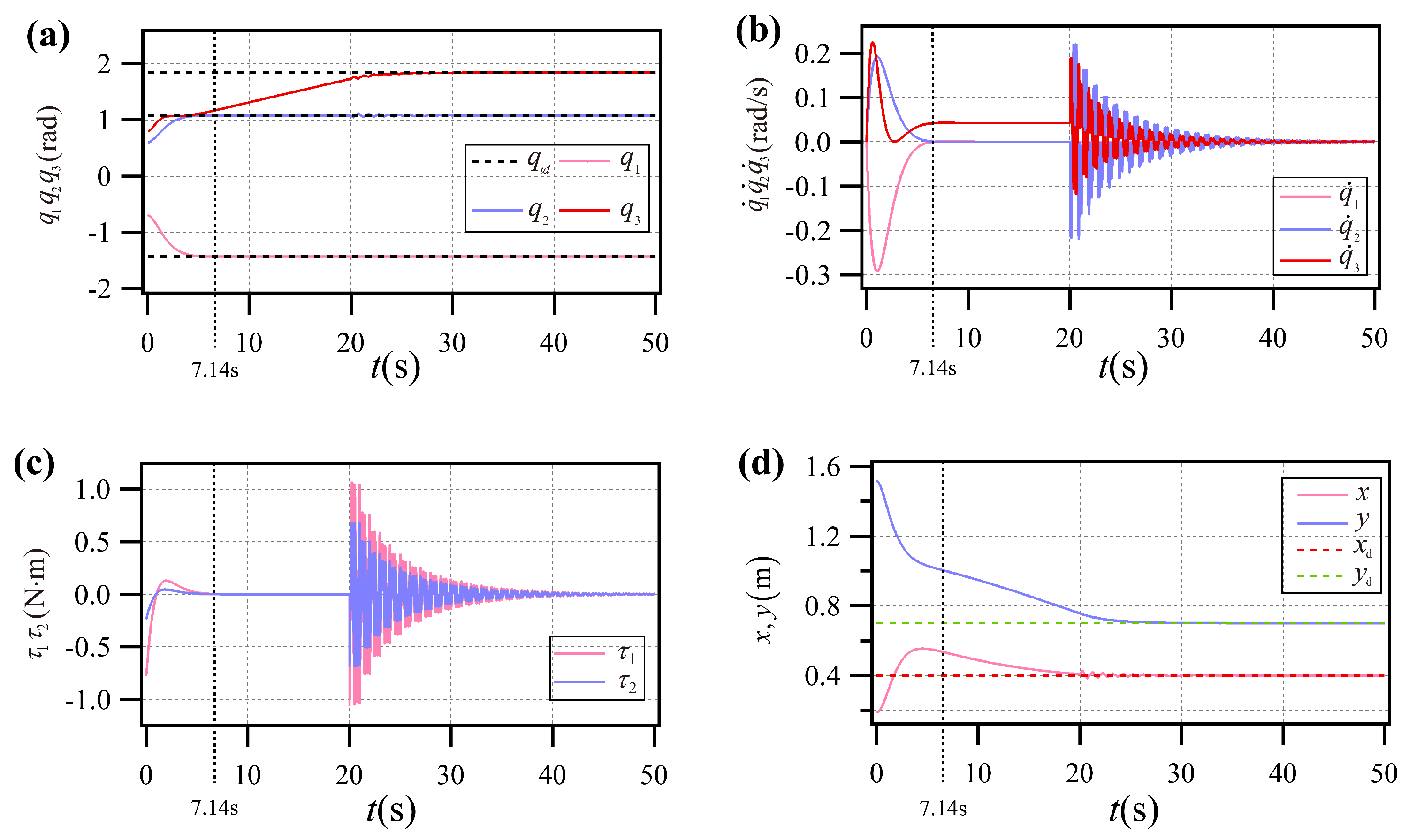
- The first group of simulations for the planar AAP system.
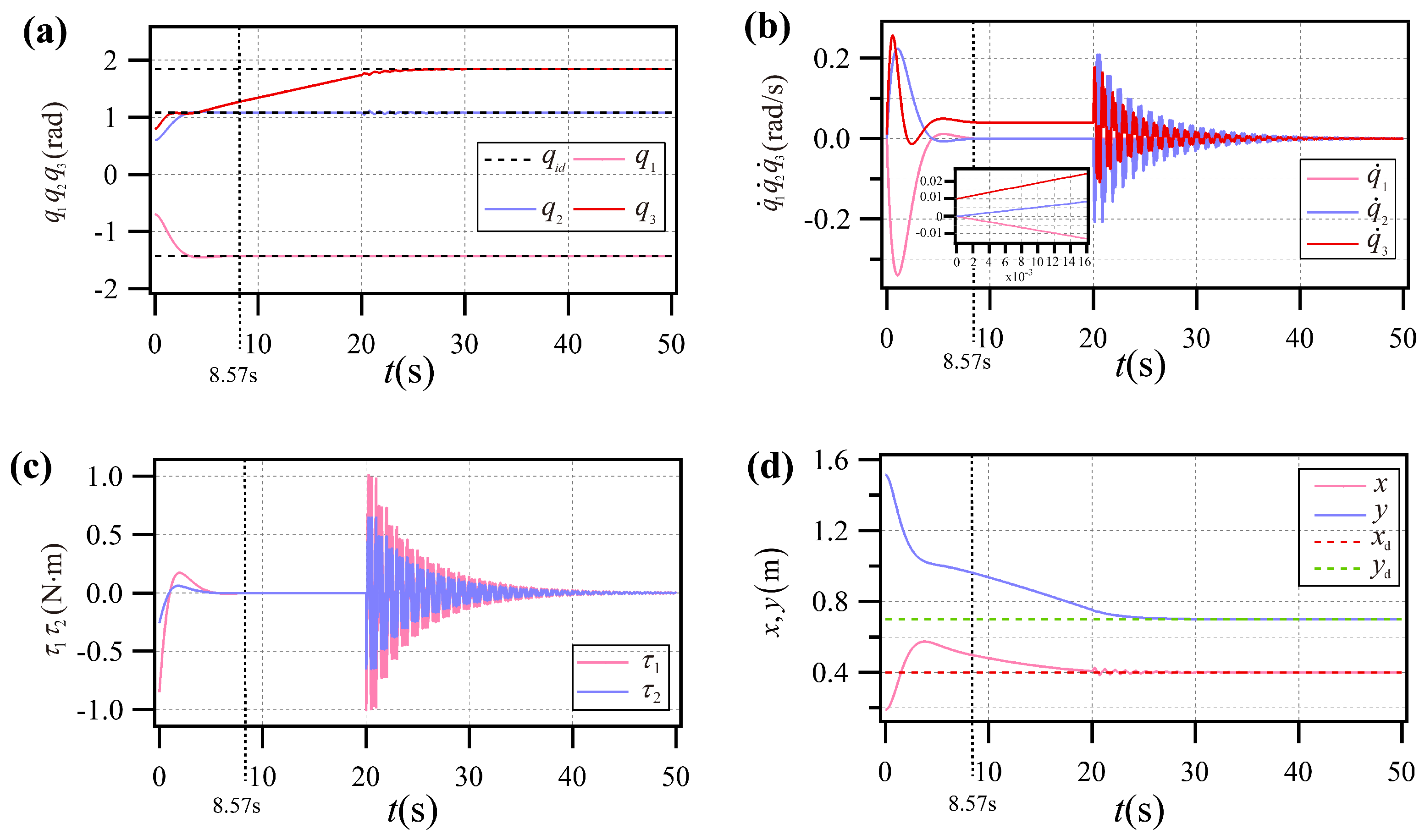
- The second group of simulations for the planar AAP system.
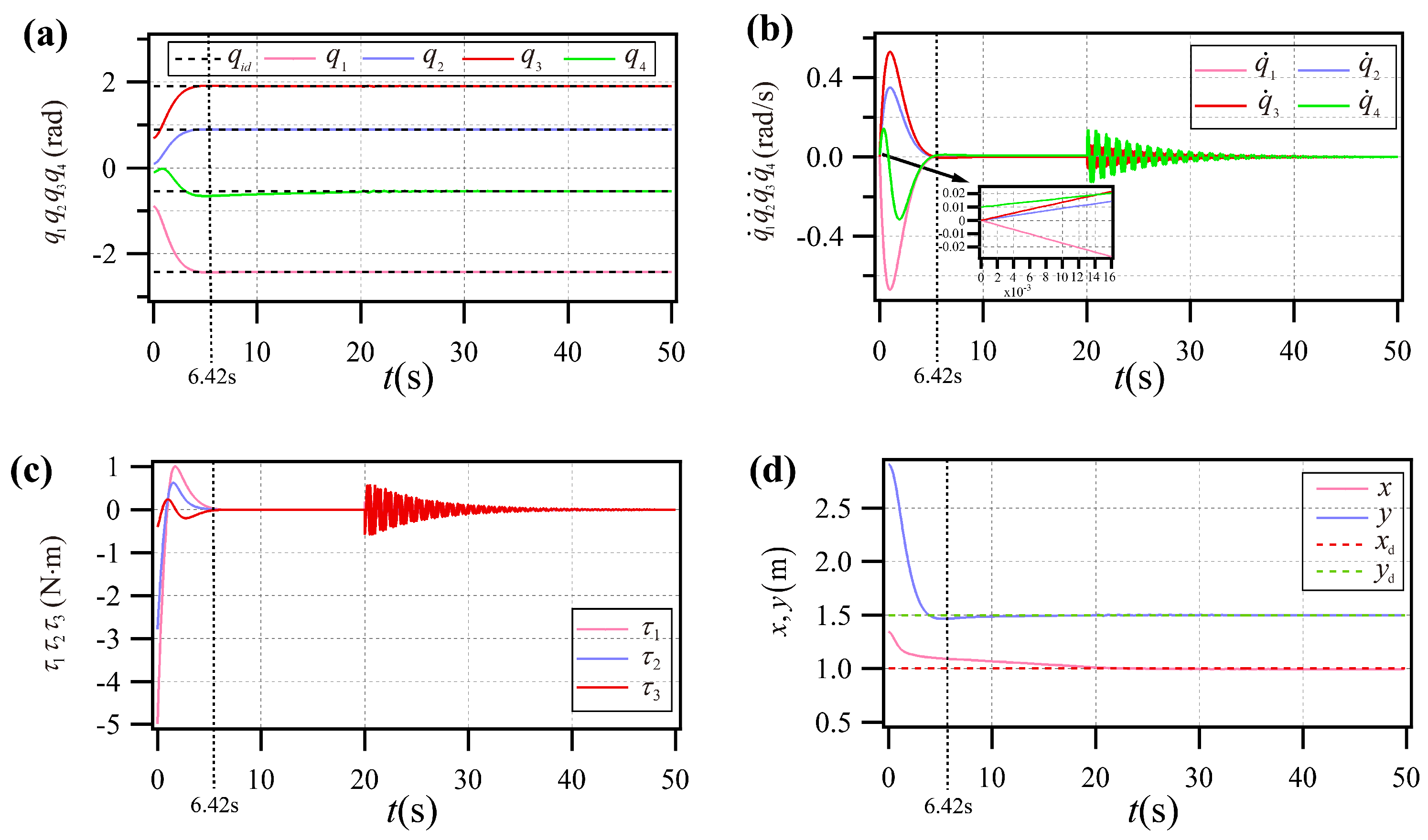
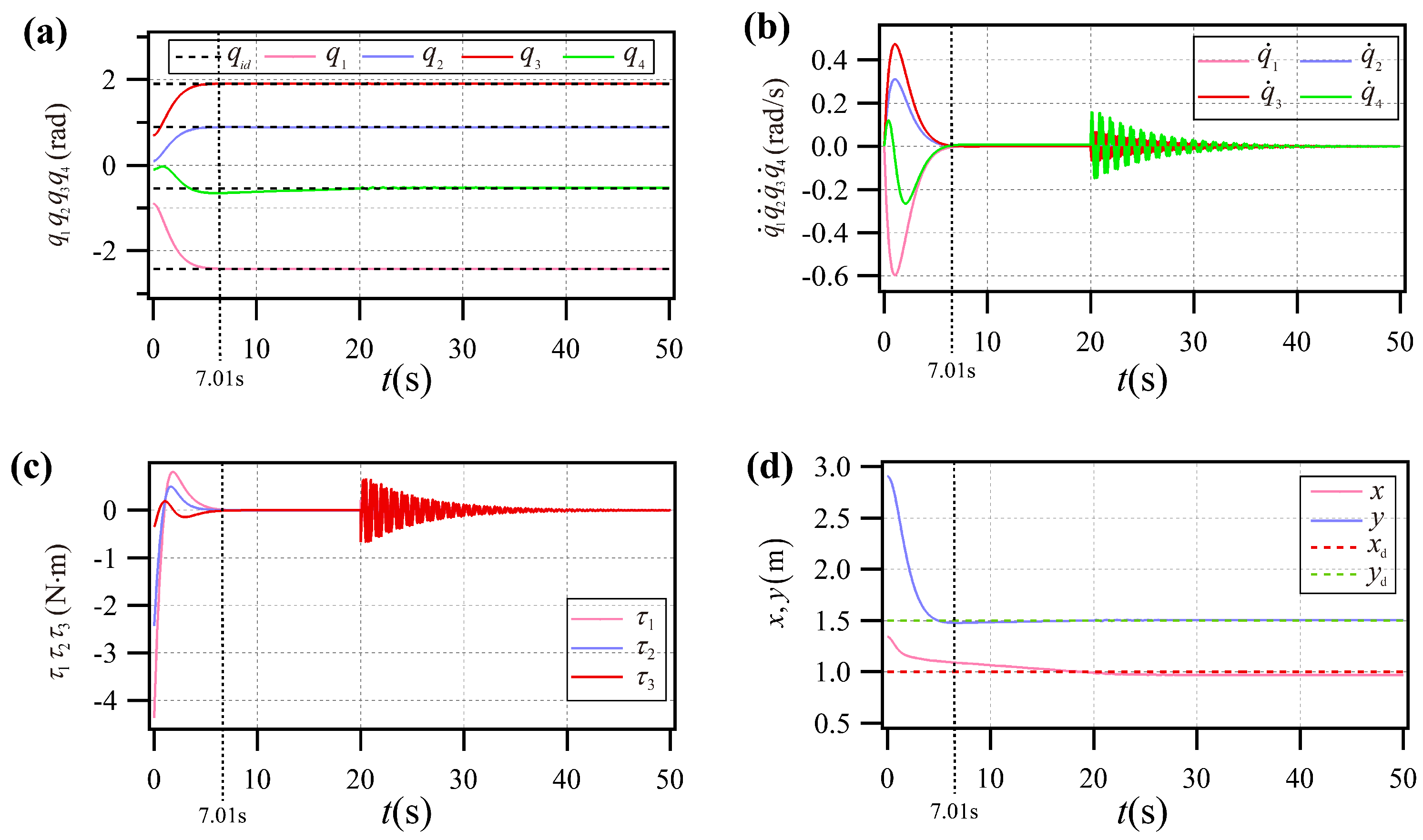
4.2. AAAP
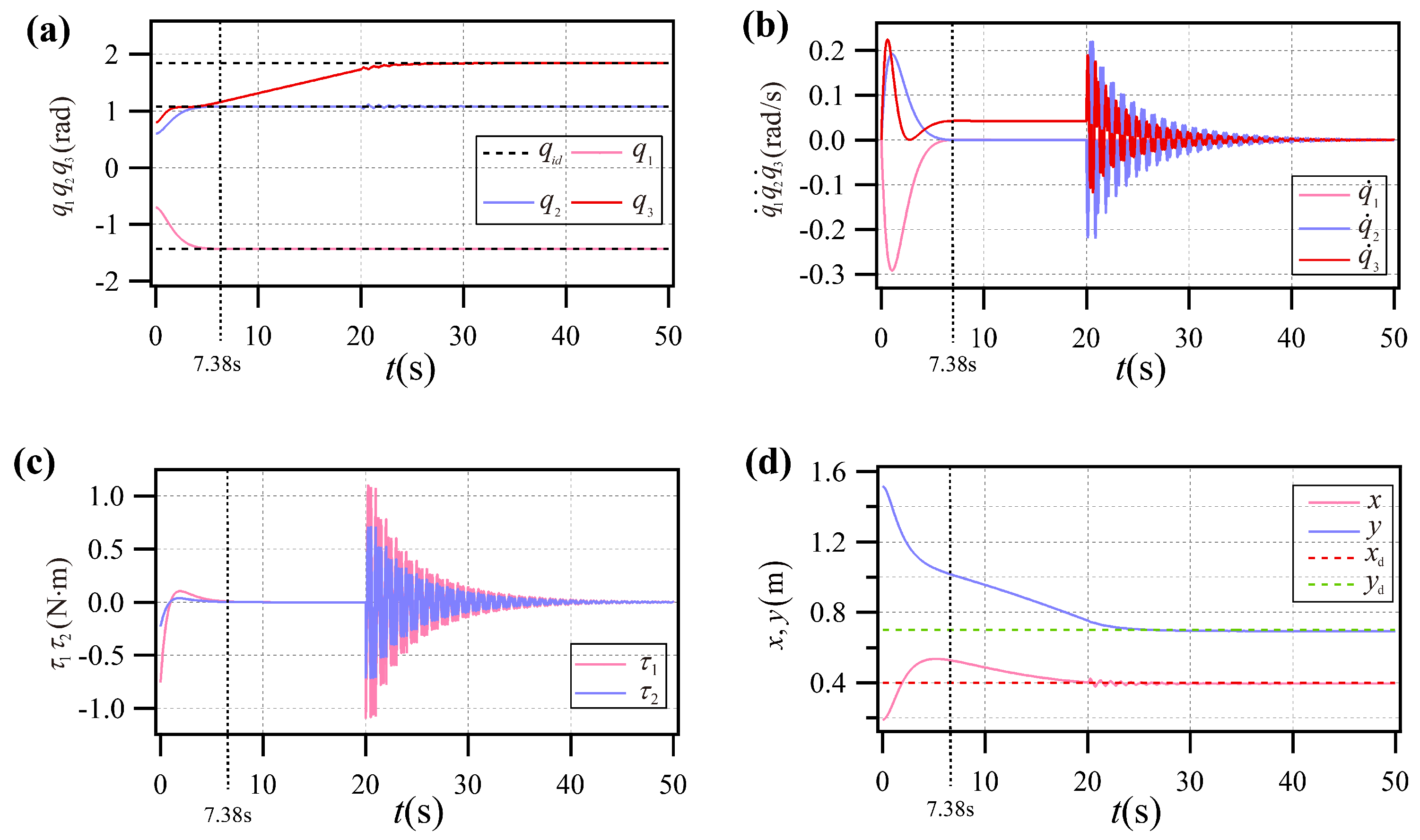
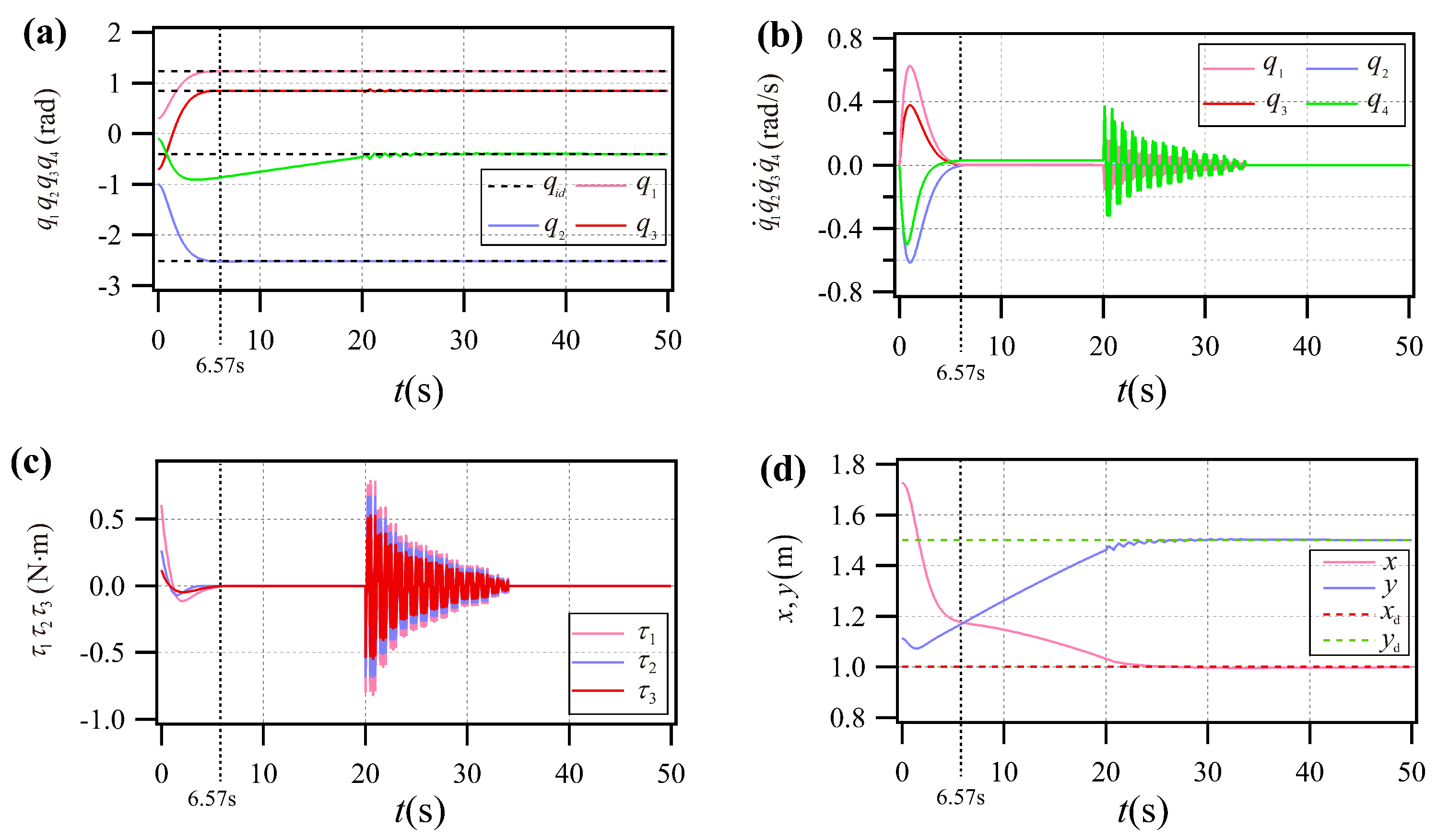
- The first group of simulations for the planar AAAP system.
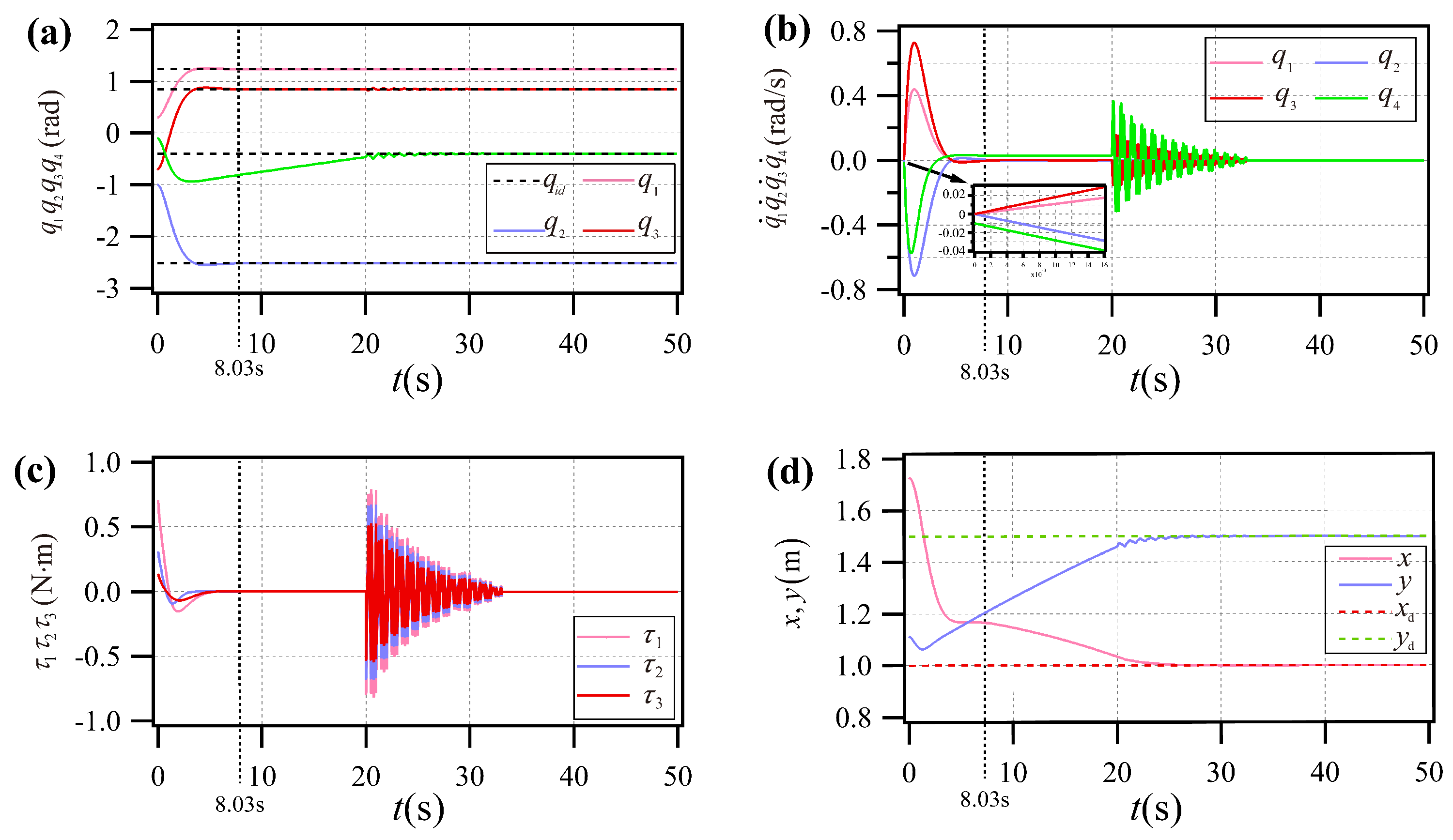
- The second group of simulations for the planar AAAP system
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Esposito, D.; Centracchio, J.; Andreozzi, E.; Savino, S.; Gargiulo, G.D.; Naik, G.R.; Bifulco, P. Design of a 3D-Printed Hand Exoskeleton Based on Force-Myography Control for Assistance and Rehabilitation. Machines 2022, 10, 57. [Google Scholar] [CrossRef]
- Abitha, M.A.; Saleem, A. Adaptive PSO-tuned trajectory tracking controller for quadrotor aircraft based on Lyapunov approach. Trans. Inst. Meas. Control 2023. [CrossRef]
- Huang, Z.; Li, X.; Wei, Z.; Wan, X.; Wang, L. A stable control method for planar robot with underactuated constraints via motion planning and intelligent optimization. Meas. Control 2023, 56, 1826–1834. [Google Scholar] [CrossRef]
- He, B.; Wang, S.; Liu, Y. Underactuated robotics: A review. Int. J. Adv. Robot. Syst. 2019, 16. [Google Scholar] [CrossRef]
- Hwang, C.L.; Wu, H.M.; Shih, C.L. Fuzzy Sliding-Mode Underactuated Control for Autonomous Dynamic Balance of an Electrical Bicycle. IEEE Trans. Control Syst. Technol. 2009, 17, 658–670. [Google Scholar] [CrossRef]
- Sun, W.; Yu, J.; He, G.; Cai, Y. Study on Transmission Mechanism and Flexible Flapping Wings of an Underactuated Flapping Wing Robot. J. Intell. Robot. Syst. 2022, 104, 19. [Google Scholar] [CrossRef]
- Yang, Y.; Ye, X.; Wen, B.; Huang, J.; Su, X. Adaptive Control Design for Uncertain Underactuated Cranes with Nonsmooth Input Nonlinearities. IEEE Trans. Syst. Man Cybern. Syst. 2023, 53, 1074–1083. [Google Scholar] [CrossRef]
- Huang, Z.; Wei, S.; Chen, Z.; Wang, L. Iterative Contraction Stability Control Strategy for Planar Prismatic-Rotational Underactuated Robot. IEEE Access 2023, 11, 55947–55953. [Google Scholar] [CrossRef]
- Yin, T.; Gu, Z.; Xie, X. Observer-Based Event-Triggered Sliding Mode Control for Secure Formation Tracking of Multi-UAV Systems. IEEE Trans. Netw. Sci. Eng. 2023, 10, 887–898. [Google Scholar] [CrossRef]
- Zhai, M.; Sun, N.; Yang, T.; Fang, Y. Underactuated Mechanical Systems with Both Actuator and Actuated/Unactuated State Constraints: A Predictive Control-Based Approach. IEEE/ASME Trans. Mechatron. 2023, 28, 1359–1371. [Google Scholar] [CrossRef]
- Jia, Q.; Yuan, B.; Chen, G.; Fu, Y. Adaptive fuzzy terminal sliding mode control for the free-floating space manipulator with free-swinging joint failure. Chin. J. Aeronaut. 2021, 34, 178–198. [Google Scholar] [CrossRef]
- Qin, G.; Ji, A.; Cheng, Y.; Zhao, W.; Pan, H.; Shi, S.; Song, Y. A Snake-Inspired Layer-Driven Continuum Robot. Soft Robot. 2022, 9, 788–797. [Google Scholar] [CrossRef] [PubMed]
- Ding, F.; Huang, J.; Xu, W.; Yang, C.; Sun, C.; Ai, Y. Dynamic surface control with a nonlinear disturbance observer for multi-degree of freedom underactuated mechanical systems. Int. J. Robust Nonlinear Control 2022, 32, 7809–7827. [Google Scholar] [CrossRef]
- Kim, Y.; Kim, S.K.; Ahn, C.K. Variable Cut-Off Frequency Observer-Based Positioning for Ball-Beam Systems without Velocity and Current Feedback Considering Actuator Dynamics. IEEE Trans. Circuits Syst. I Regul. Pap. 2021, 68, 396–405. [Google Scholar] [CrossRef]
- Nagarajan, A.; Victoire, A.A. Optimization Reinforced PID-Sliding Mode Controller for Rotary Inverted Pendulum. IEEE Access 2023, 11, 24420–24430. [Google Scholar] [CrossRef]
- Huang, Z.; Hou, M.; Hua, Y.; Yu, C.; Wang, L. A General Stable Control Method for R-Type Underactuated Robot with Three Different Initial Situations. Appl. Sci. 2023, 13, 5565. [Google Scholar] [CrossRef]
- Hutterer, M.; Wimmer, D.; Schrodl, M. Stabilization of a Magnetically Levitated Rotor in the Case of a Defective Radial Actuator. IEEE/ASME Trans. Mechatron. 2020, 25, 2599–2609. [Google Scholar] [CrossRef]
- Xie, Y.; Li, H.; Jia, Q.; Nie, X. Application of Internet of Things Technology in Mechanical Automation Control. J. Sens. 2022, 2022, 1–7. [Google Scholar] [CrossRef]
- He, B.; Xu, F.; Zhang, P. Kinematics approach to energy efficiency for non-holonomic underactuated robotics in sustainable manufacturing. Int. J. Adv. Manuf. Technol. 2022, 119, 1123–1138. [Google Scholar] [CrossRef]
- Meng, Q.; Lai, X.; Yan, Z.; Wu, M. Tip Position Control and Vibration Suppression of a Planar Two-Link Rigid-Flexible Underactuated Manipulator. IEEE Trans. Cybern. 2022, 52, 6771–6783. [Google Scholar] [CrossRef]
- Wang, Y.; Lai, X.; Chen, L.; Ding, H.; Wu, M. A quick control strategy based on hybrid intelligent optimization algorithm for planar n-link underactuated manipulators. Inf. Sci. 2017, 420, 148–158. [Google Scholar] [CrossRef]
- Xiong, P.Y.; Lai, X.Z.; Wu, M. Position and posture control for a class of second-order nonholonomic underactuated mechanical system. IMA J. Math. Control Inf. 2018, 35, 523–533. [Google Scholar] [CrossRef]
- Yang, T.; Chen, H.; Sun, N.; Fang, Y. Adaptive Neural Network Output Feedback Control of Uncertain Underactuated Systems With Actuated and Unactuated State Constraints. IEEE Trans. Syst. Man Cybern. Syst. 2022, 52, 7027–7043. [Google Scholar] [CrossRef]
- Song, Y.; Li, H.; Shi, X. Stabilization of a Class of Nonlinear Underactuated Robotic Systems through Nonsingular Fast Terminal Sliding Mode Control. Math. Probl. Eng. 2020, 2020, 1–9. [Google Scholar] [CrossRef]
- Jiang, J.; Astolfi, A. Stabilization of a Class of Underactuated Nonlinear Systems via Underactuated Back-Stepping. IEEE Trans. Autom. Control 2021, 66, 5429–5435. [Google Scholar] [CrossRef]
- Roy, S.; Baldi, S.; Ioannou, P.A. An Adaptive Control Framework for Underactuated Switched Euler–Lagrange Systems. IEEE Trans. Autom. Control 2022, 67, 4202–4209. [Google Scholar] [CrossRef]
- Berger, T.; Drücker, S.; Lanza, L.; Reis, T.; Seifried, R. Tracking control for underactuated non-minimum phase multibody systems. Nonlinear Dyn. 2021, 104, 3671–3699. [Google Scholar] [CrossRef]
- Chang, D.E.; Perlmutter, M.; Vankerschaver, J. Feedback Integrators for Mechanical Systems with Holonomic Constraints. Sensors 2022, 22, 6487. [Google Scholar] [CrossRef]
- Bodor, B.; Zelei, A.; Bencsik, L. Predictive Trajectory Tracking Algorithm of Underactuated Systems Based on the Calculus of Variations. J. Comput. Nonlinear Dyn. 2021, 16, 081002. [Google Scholar] [CrossRef]
- Bayat, F.; Mobayen, S.; Javadi, S. Finite-time tracking control of nth-order chained-form non-holonomic systems in the presence of disturbances. ISA Trans. 2016, 63, 78–83. [Google Scholar] [CrossRef]
- Wu, J.; Ye, W.; Wang, Y.; Su, C.Y. A General Position Control Method for Planar Underactuated Manipulators with Second-Order Nonholonomic Constraints. IEEE Trans. Cybern. 2021, 51, 4733–4742. [Google Scholar] [CrossRef] [PubMed]
- Rodriguez, L.P.; Fernandez, M.C.; Sanchez, M.C.; Scaglia, G.J. Linear Algebra Based Control: Application to a second order chained form system. IEEE Lat. Am. Trans. 2021, 19, 1435–1442. [Google Scholar] [CrossRef]
- Lai, X.Z.; She, J.H.; Cao, W.H.; Yang, S.X. Stabilization of underactuated planar acrobot based on motion-state constraints. Int. J. Non-Linear Mech. 2015, 77, 342–347. [Google Scholar] [CrossRef]
- He, G.P.; Wang, Z.L.; Zhang, J.; Geng, Z.Y. Characteristics analysis and stabilization of a planar 2R underactuated manipulator. Robotica 2016, 34, 584–600. [Google Scholar] [CrossRef]
- Zhang, A.; Lai, X.; Wu, M.; She, J. Nonlinear stabilizing control for a class of underactuated mechanical systems with multi degree of freedoms. Nonlinear Dyn. 2017, 89, 2241–2253. [Google Scholar] [CrossRef]
- Wang, Y.; Lai, X.; Zhang, P.; Su, C.; Wu, M. A new control method for planar four-link underactuated manipulator based on intelligence optimization. Nonlinear Dyn. 2019, 96, 573–583. [Google Scholar] [CrossRef]
- Xiong, P.; Lai, X.; Wu, M. A stable control for second-order nonholonomic planar underactuated mechanical system: Energy attenuation approach. Int. J. Control 2018, 91, 1630–1639. [Google Scholar] [CrossRef]
- Wang, Y.; Chen, S.; Zhang, P. Position-posture Control Strategy for Planar Underactuated Manipulators with Second-order Nonholonomic Constraint. Int. J. Control Autom. Syst. 2022, 20, 4015–4025. [Google Scholar] [CrossRef]
- Wu, J.; Wang, Y.; Ye, W.; Su, C.Y. Control strategy based on Fourier transformation and intelligent optimization for planar Pendubot. Inf. Sci. 2019, 491, 279–288. [Google Scholar] [CrossRef]
- Luca, A.D.; Oriolo, G. Trajectory Planning and Control for Planar Robots with Passive Last Joint. Int. J. Robot. Res. 2002, 21, 575–590. [Google Scholar] [CrossRef]
- Lai, X.; Wang, Y.; Wu, M.; Cao, W. Stable Control Strategy for Planar Three-Link Underactuated Mechanical System. IEEE/ASME Trans. Mechatron. 2016, 21, 1345–1356. [Google Scholar] [CrossRef]
- LaSalle, J. Stability theory for ordinary differential equations. J. Differ. Equ. 1968, 4, 57–65. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Link i | (kg) | (m) | (m) | |
|---|---|---|---|---|
| 0.7 | 0.7 | 0.35 | 0.0286 | |
| 0.6 | 0.6 | 0.3 | 0.0180 | |
| 0.5 | 0.5 | 0.25 | 0.0104 |
| Link i | ||||
|---|---|---|---|---|
| 1.258 | 0.34 | 0.17 | 0.0121 | |
| 5.686 | 0.29 | 0.145 | 0.0398 | |
| 2.162 | 0.52 | 0.26 | 0.0487 |
| Link i | ||||
|---|---|---|---|---|
| 0.6 | 0.6 | 0.30 | 0.0180 | |
| 0.8 | 0.8 | 0.40 | 0.0427 | |
| 1.0 | 1.0 | 0.50 | 0.0833 | |
| 1.0 | 1.0 | 0.50 | 0.0833 |
| Link i | ||||
|---|---|---|---|---|
| 0.5 | 0.6 | 0.25 | 0.0104 | |
| 0.6 | 0.6 | 0.30 | 0.0180 | |
| 0.6 | 0.6 | 0.30 | 0.0180 | |
| 0.8 | 0.8 | 0.40 | 0.0427 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Huang, Z.; Wang, W.; Zeng, B.; Yu, C.; Zhou, Y. Comprehensive Stable Control Strategy for a Typical Underactuated Manipulator Considering Several Uncertainties. Appl. Sci. 2024, 14, 3663. https://doi.org/10.3390/app14093663
Huang Z, Wang W, Zeng B, Yu C, Zhou Y. Comprehensive Stable Control Strategy for a Typical Underactuated Manipulator Considering Several Uncertainties. Applied Sciences. 2024; 14(9):3663. https://doi.org/10.3390/app14093663
Chicago/Turabian StyleHuang, Zixin, Wei Wang, Ba Zeng, Chengsong Yu, and Yaosheng Zhou. 2024. "Comprehensive Stable Control Strategy for a Typical Underactuated Manipulator Considering Several Uncertainties" Applied Sciences 14, no. 9: 3663. https://doi.org/10.3390/app14093663
APA StyleHuang, Z., Wang, W., Zeng, B., Yu, C., & Zhou, Y. (2024). Comprehensive Stable Control Strategy for a Typical Underactuated Manipulator Considering Several Uncertainties. Applied Sciences, 14(9), 3663. https://doi.org/10.3390/app14093663