
Design and Experimentation of Tensegrity Jumping Robots
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Jumping Robot Design
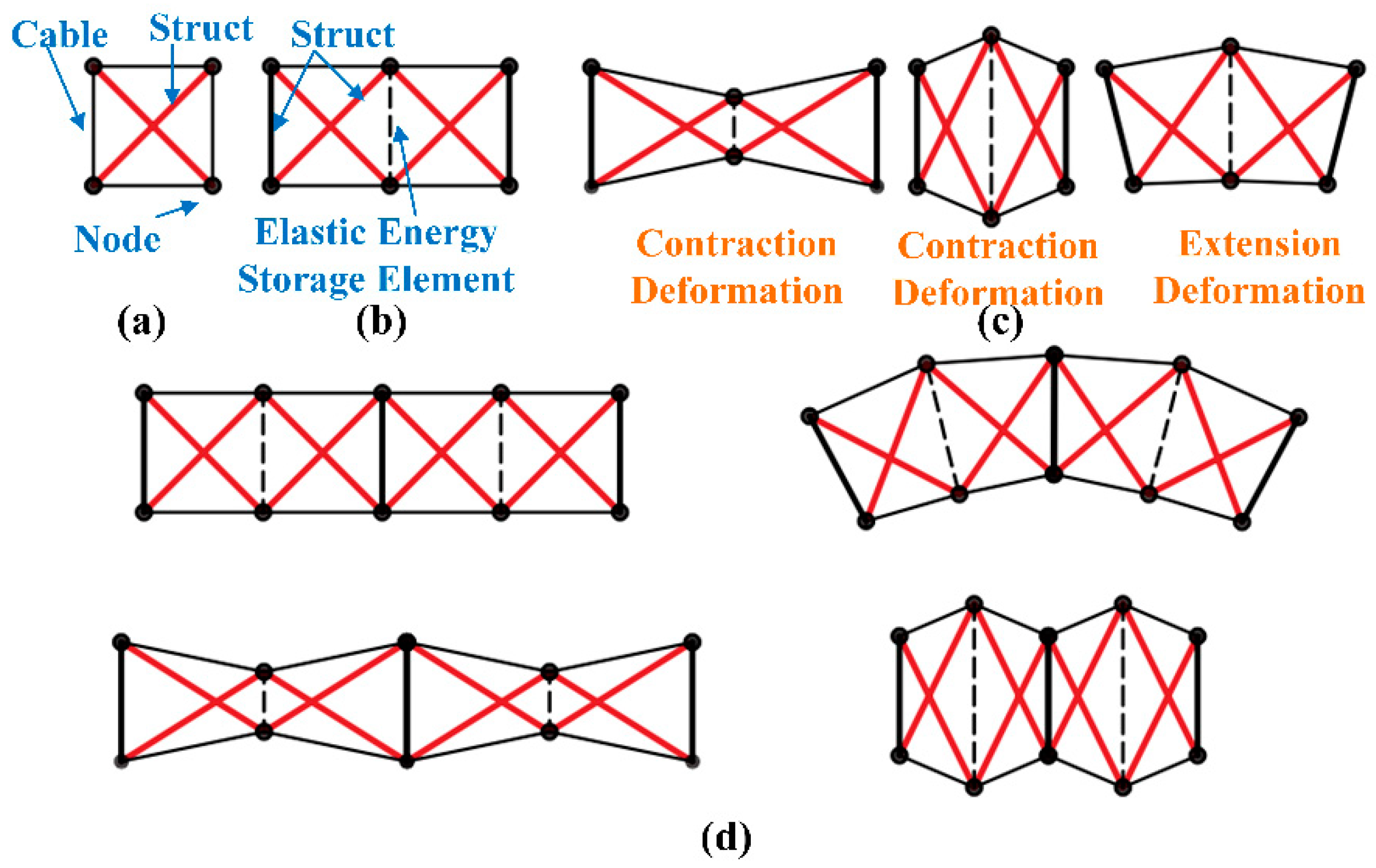
2.1. Robot Structural Design
2.2. Jumping Mechanism
3. Dynamic Modeling and Simulations Analysis
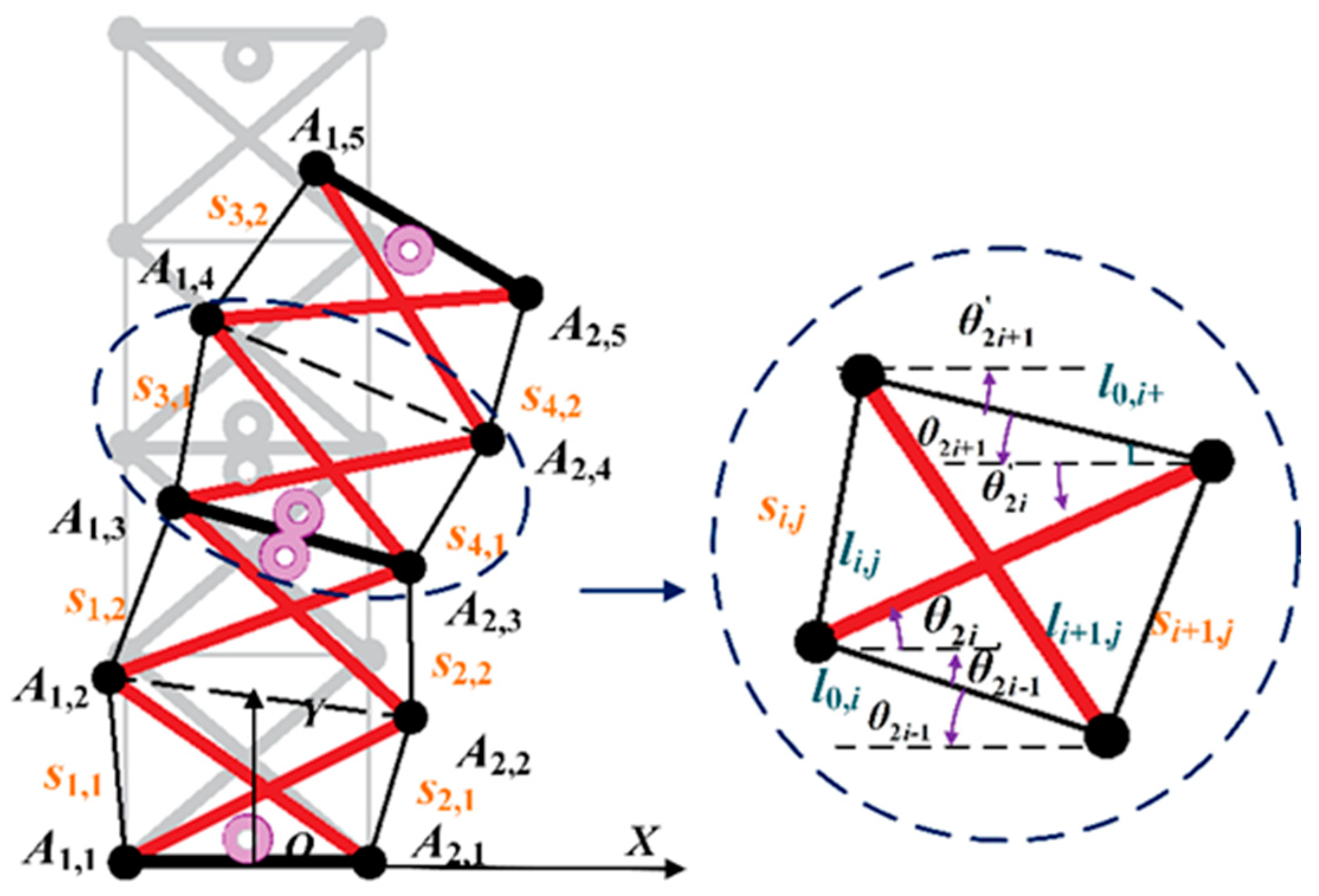
3.1. Dynamic Modeling
3.1.1. Dynamic Modeling of Two Modules’ Simultaneous Jump
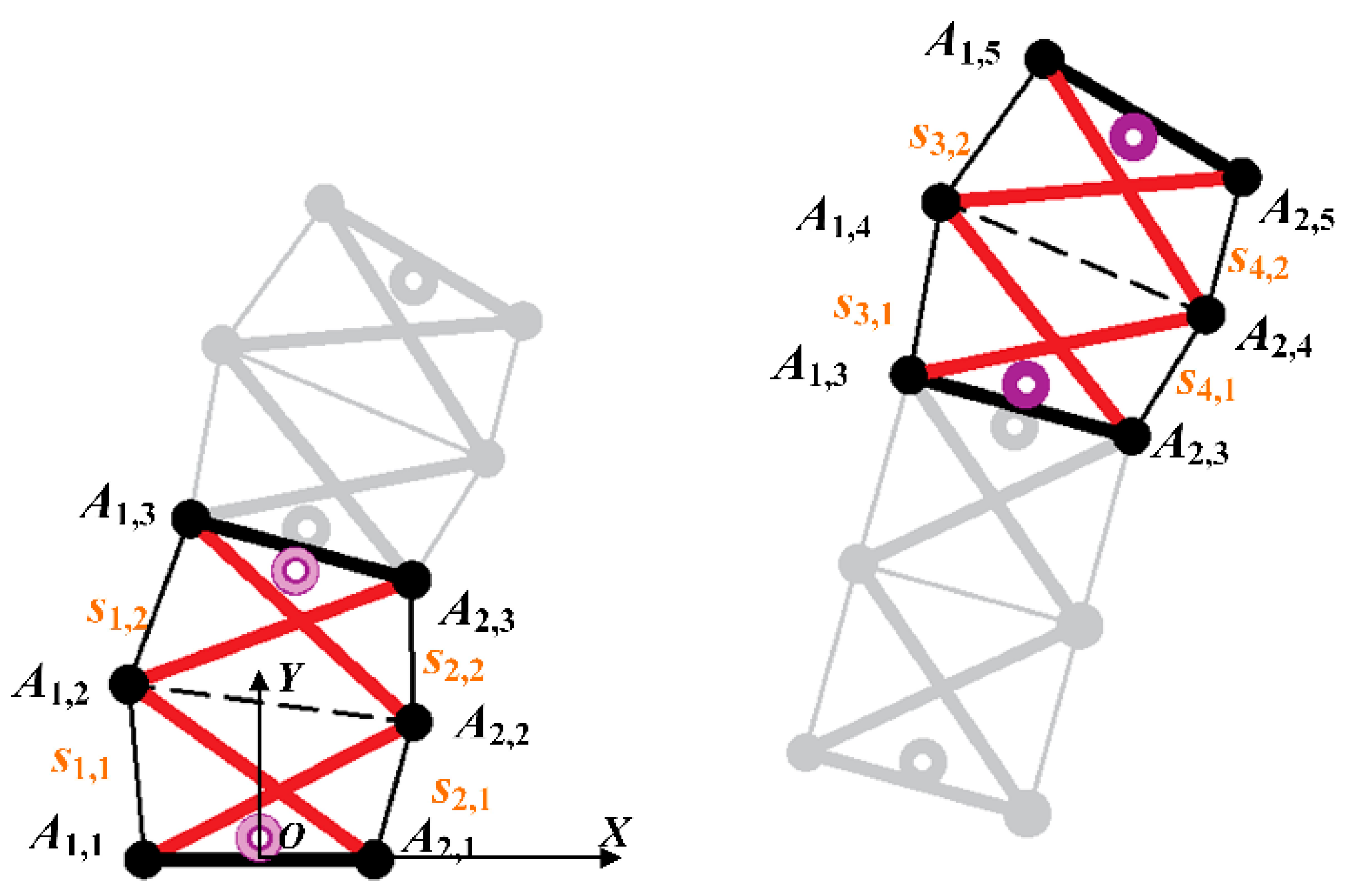
3.1.2. Dynamic Modeling of Two Modules’ Step-Up Jump
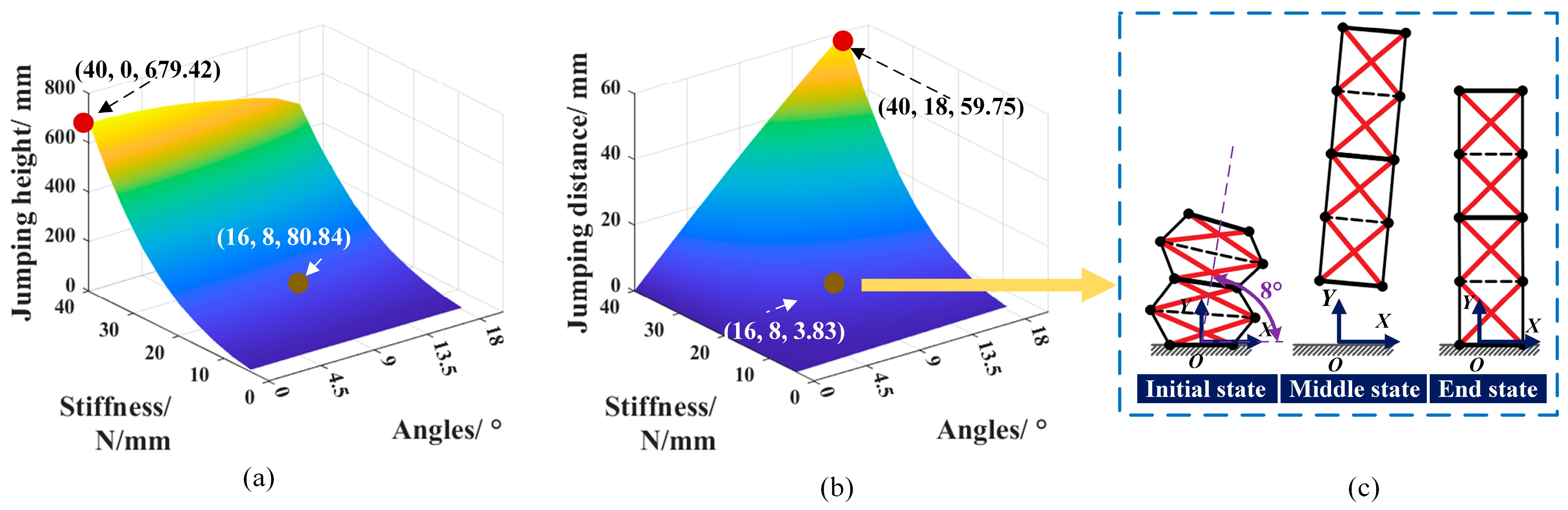
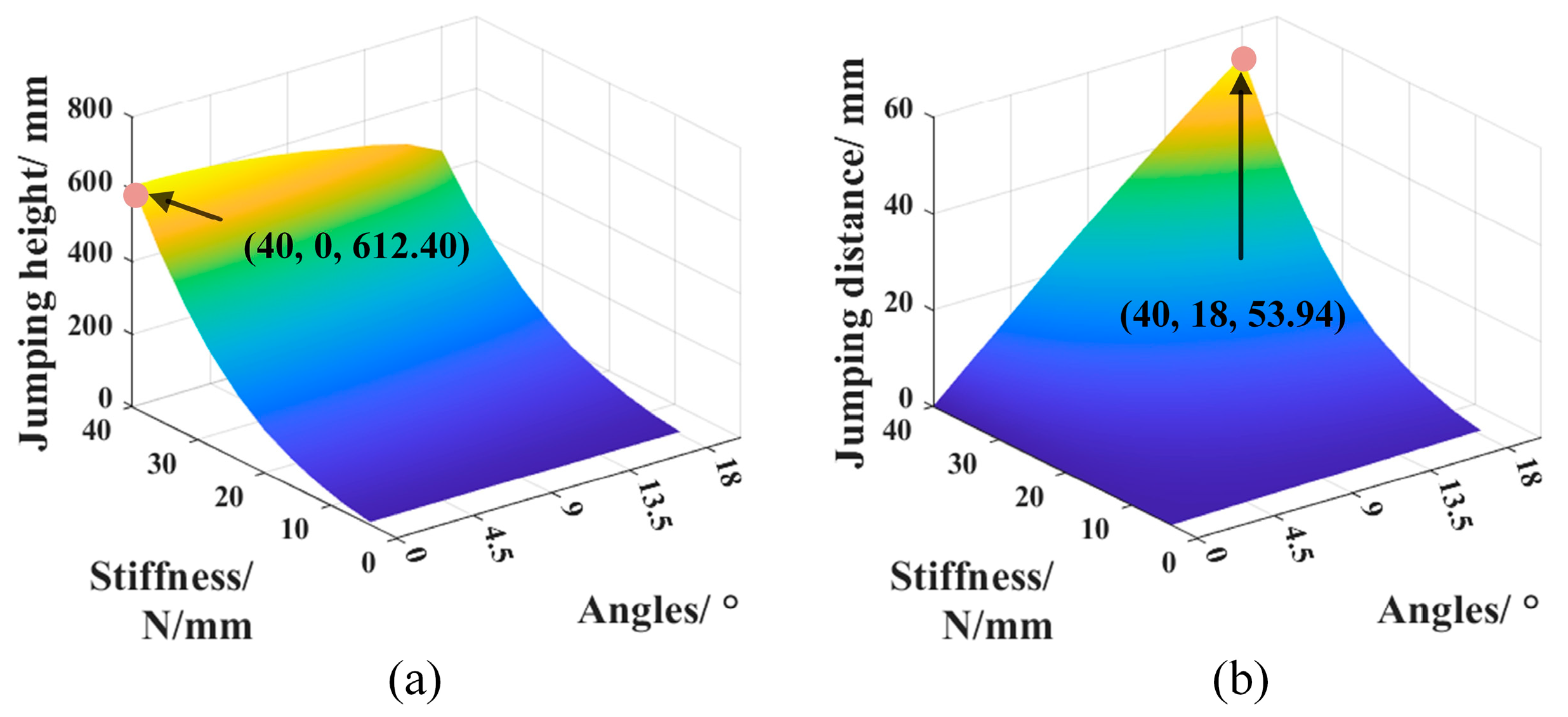
3.2. Performance Analysis
3.2.1. Performance Analysis of Simultaneous Jumps
3.2.2. Performance Analysis of A Step-Up Jump
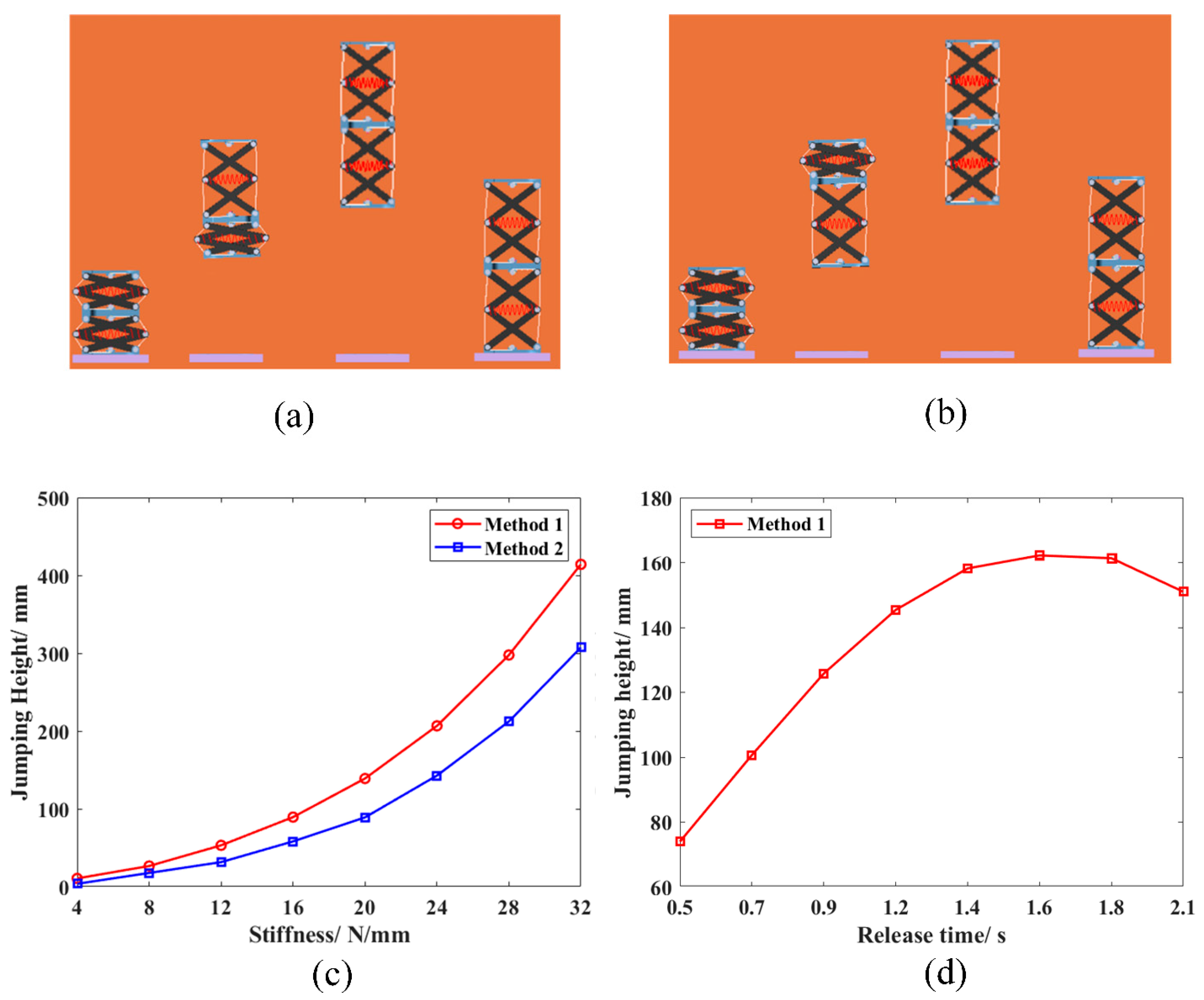
3.3. Simulations Analysis
4. Experiment Verification
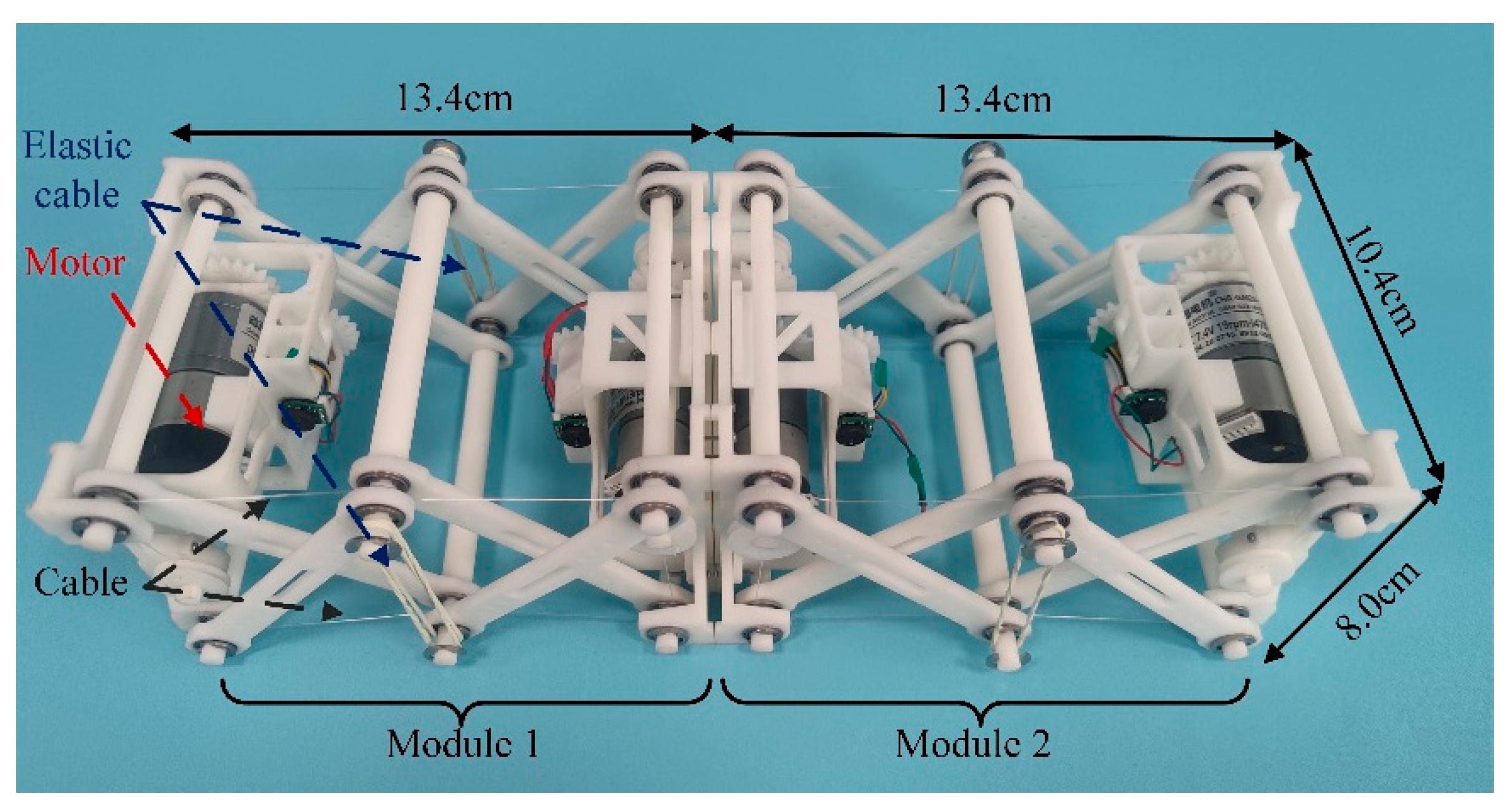
4.1. Prototype of the Robot
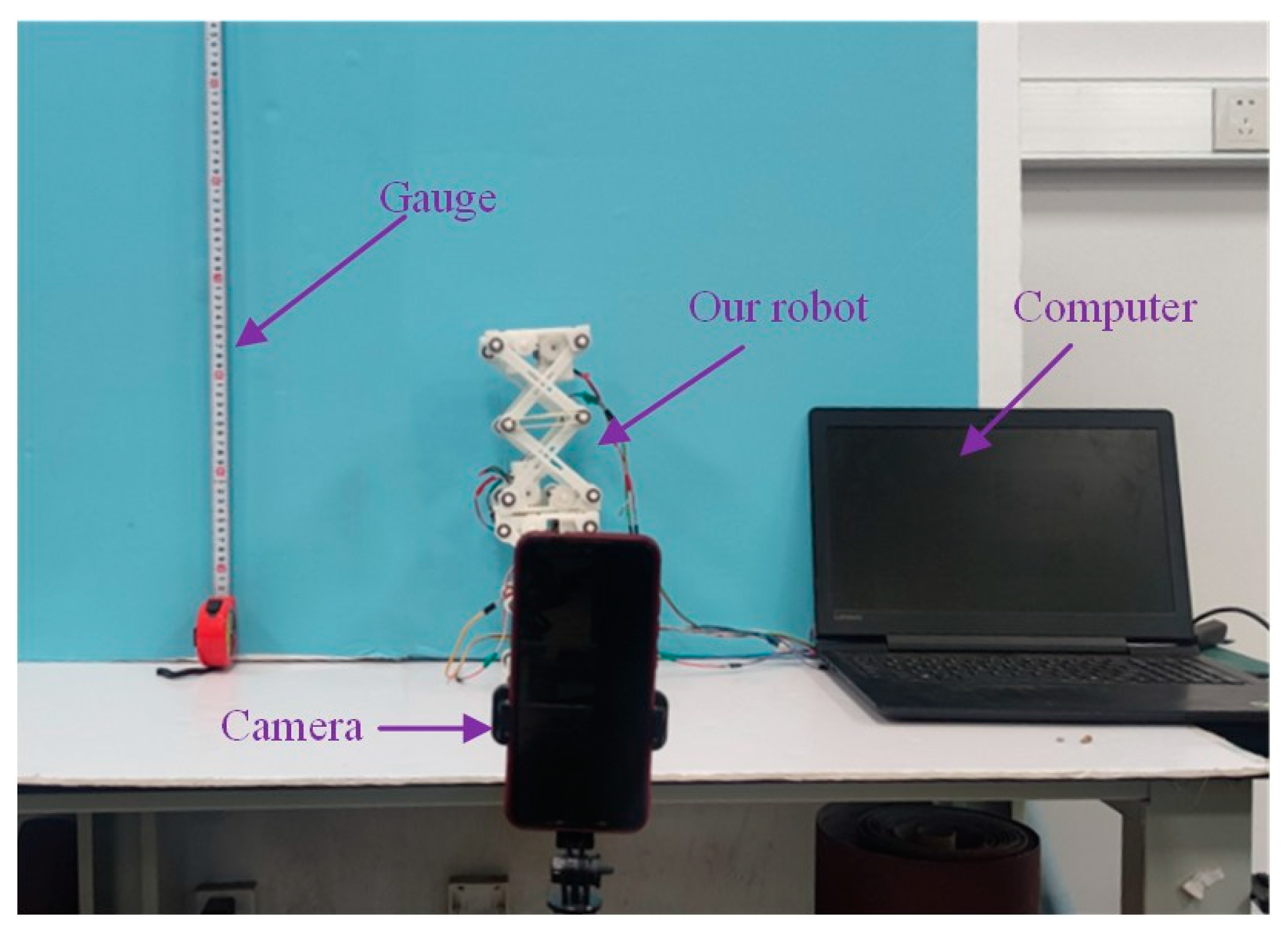
4.2. Experimental Results
5. Conclusions
- (1)
- The design process of the tensegrity-based jumping robot is elaborated in the context and the jumping mechanism of the robot is analyzed;
- (2)
- Dynamic models of the robot are established, which include two modules’ simultaneous jumping and step-up jumping processes. Performance analysis for different jumping processes is conducted and the interrelation between parameters and performance is established;
- (3)
- The simulation and experiment results show that our jumping robot can achieve a stable jumping process and the step-up jumping of each module of the prototype can have higher energy efficiency than that of simultaneous jumping of each module, which enables the robot a better jumping performance.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A
References
- Elena, G.; Jimenez, M.A.; De Santos, P.G.; Armada, M. The Evolution of Robotics Research—From Industrial Robotics to Field and Service Robotics. IEEE Robot. Autom. Mag. 2007, 14, 90–103. [Google Scholar]
- Sun, T.; Zhai, Y.; Song, Y.; Zhang, J. Kinematic Calibration of a 3-Dof Rotational Parallel Manipulator Using Laser Tracker. Robot. Comput.-Integr. Manuf. 2016, 41, 78–91. [Google Scholar] [CrossRef]
- Sun, T.; Yang, S.-F.; Huang, T.; Dai, J.S. A Finite and Instantaneous Screw Based Approach for Topology Design and Kinematic Analysis of 5-Axis Parallel Kinematic Machines. Chin. J. Mech. Eng. 2018, 31, 44. [Google Scholar] [CrossRef]
- Ma, T.; Xu, X.; Chai, Z.; Wang, T.; Shen, X.; Sun, T. A Wearable Biofeedback Device for Monitoring Tibial Load During Partial Weight-Bearing Walking. IEEE Trans. Neural Syst. Rehabil. Eng. 2023, 31, 3428–3436. [Google Scholar] [CrossRef] [PubMed]
- Sun, T.; Liang, D.; Song, Y. Singular-Perturbation-Based Nonlinear Hybrid Control of Redundant Parallel Robot. IEEE Trans. Ind. Electron. 2017, 65, 3326–3336. [Google Scholar] [CrossRef]
- Sun, T.; Xiang, X.; Su, W.; Wu, H.; Song, Y. A Transformable Wheel-Legged Mobile Robot: Design, Analysis and Experiment. Robot. Auton. Syst. 2017, 98, 30–41. [Google Scholar] [CrossRef]
- Chen, K.; Wang, M.; Huo, X.; Wang, P.; Sun, T. Topology and Dimension Synchronous Optimization Design of 5-Dof Parallel Robots for in-Situ Machining of Large-Scale Steel Components. Mech. Mach. Theory 2023, 179, 105105. [Google Scholar] [CrossRef]
- Sun, T.; Yang, S. An Approach to Formulate the Hessian Matrix for Dynamic Control of Parallel Robots. IEEE/ASME Trans. Mechatron. 2019, 24, 271–281. [Google Scholar] [CrossRef]
- Liu, C.; Song, Y.; Ma, X.; Sun, T. Accurate and Robust Registration Method for Computer-Assisted High Tibial Osteotomy Surgery. Int. J. Comput. Assist. Radiol. Surg. 2023, 18, 329–337. [Google Scholar] [CrossRef]
- Sun, T.; Huo, X. Type Synthesis of 1t2r Parallel Mechanisms with Parasitic Motions. Mech. Mach. Theory 2018, 128, 412–428. [Google Scholar] [CrossRef]
- Bruzzone, L.; Quaglia, G. Locomotion Systems for Ground Mobile Robots in Unstructured Environments. Mech. Sci. 2012, 3, 49–62. [Google Scholar] [CrossRef]
- Francisco, R.; Valero, F.; Llopis-Albert, C. A Review of Mobile Robots: Concepts, Methods, Theoretical Framework, and Applications. Int. J. Adv. Robot. Syst. 2019, 16, 1729881419839596. [Google Scholar]
- Li, J.; Liu, Y.; Yu, Z.; Guan, Y.; Zhao, Y.; Zhuang, Z.; Sun, T. Design, Analysis, and Experiment of a Wheel-Legged Mobile Robot. Appl. Sci. 2023, 13, 9936. [Google Scholar] [CrossRef]
- Yang, Q.; Liu, X.; Wang, P.; Song, Y.; Sun, T. Multi-Locomotion Transition of Tensegrity Mobile Robot under Different Terrains. Sci. China Technol. Sci. 2023, 67, 536–557. [Google Scholar] [CrossRef]
- Li, J.; Liu, Y.; Yu, Z.; Guan, Y.; Zhao, Y.; Zhuang, Z.; Sun, T. A Low-Energy Consumption Planning Method for Multi-Locomotion Wheel-Legged Mobile Robots. Machines 2024, 12, 98. [Google Scholar] [CrossRef]
- Aravind, S.; Schäfer, B.; Hirzinger, G. Robot Mobility Systems for Planetary Surface Exploration–State-of-the-Art and Future Outlook: A Literature Survey. Aerosp. Technol. Adv. 2010, 492, 189–208. [Google Scholar]
- Zhang, C.; Zou, W.; Ma, L.; Wang, Z. Biologically Inspired Jumping Robots: A Comprehensive Review. Robot. Auton. Syst. 2020, 124, 103362. [Google Scholar] [CrossRef]
- Gal, R. Insect-Inspired Jumping Robots: Challenges and Solutions to Jump Stability. Curr. Opin. Insect Sci. 2020, 42, 32–38. [Google Scholar]
- Zhang, Y.; Li, P.; Quan, J.; Li, L.; Zhang, G.; Zhou, D. Progress, Challenges, and Prospects of Soft Robotics for Space Applications. Adv. Intell. Syst. 2023, 5, 2200071. [Google Scholar] [CrossRef]
- Paolo, F.; Burdick, J. The Development of Hopping Capabilities for Small Robots. Auton. Robot. 2003, 14, 239–254. [Google Scholar]
- Yan, H.; Zhu, X.; Hou, Z.; Wang, W.; Zhang, Z. Design and Motion Modeling of a Small-Scale Lunar Jumping Robot. J. Shanghai Jiaotong Univ. 2023, in press. [Google Scholar]
- Yun, R.; Liu, Z.; Leng, J.; Huang, J.; Yan, X.; Qi, M. A Millimeter-Scale Multilocomotion Microrobot Capable of Controlled Crawling and Jumping. Soft Robot. 2024, 11, 361–370. [Google Scholar] [CrossRef] [PubMed]
- Wu, M. Robotics Applications in Natural Hazards. Highlights Sci. Eng. Technol. 2023, 43, 273–279. [Google Scholar] [CrossRef]
- Yin, Z.; Yang, Z.; Van De Panne, M.; Yin, K. Discovering Diverse Athletic Jumping Strategies. ACM Trans. Graph. (TOG) 2021, 40, 1–17. [Google Scholar] [CrossRef]
- Umberto, S.; Stefanini, C.; Dario, P. A Bioinspired Concept for High Efficiency Locomotion in Micro Robots: The Jumping Robot Grillo. In Proceedings of the 2006 IEEE International Conference on Robotics and Automation (ICRA), Orlando, FL, USA, 15–19 May 2006. [Google Scholar]
- Tibert, A.G.; Pellegrino, S. Review of Form-Finding Methods for Tensegrity Structures. Int. J. Space Struct. 2011, 26, 241–255. [Google Scholar] [CrossRef]
- Donato, R.; Donati, E.; Benelli, G.; Stefanini, C. A Review on Animal–Robot Interaction: From Bio-Hybrid Organisms to Mixed Societies. Biol. Cybern. 2019, 113, 201–225. [Google Scholar]
- Tur Mirats, J.M.; Juan, S.H. Tensegrity Frameworks: Dynamic Analysis Review and Open Problems. Mech. Mach. Theory 2009, 44, 1–18. [Google Scholar] [CrossRef]
- Yang, Q.; Yu, Z.; Liu, X.; Lian, B.; Sun, T. A Small-Scale Untethered Tensegrity Robot with High Velocity and Multi Locomotion Modes. IEEE Robot. Autom. Lett. 2023, 8, 7503–7510. [Google Scholar] [CrossRef]
- Yang, Q.; Liu, X.; Wang, P.; Song, Y.; Sun, T. A Multi-Locomotion Clustered Tensegrity Mobile Robot with Fewer Actuators. Robot. Auton. Syst. 2023, 168, 104504. [Google Scholar] [CrossRef]
- Hiroshi, F. Concept of Deployable Tensegrity Structures in Space Application. Int. J. Space Struct. 1992, 7, 143–1451. [Google Scholar]
- Skelton, R.E.; Helton, J.W.; Adhikari, R.; Pinaud, J.-P.; Chan, W. An Introduction to the Mechanics of Tensegrity Structures. In The Mechanical Systems Design Handbook; CRC Press: Boca Raton, FL, USA, 2017; pp. 315–388. [Google Scholar]
- Brian, S.; Choxi, H.; Salamon, A.; Drewes, P. Advancing Robotics: The Urban Challenge Effect. J. Aerosp. Comput. Inf. Commun. 2008, 5, 530–542. [Google Scholar]
- Hendrik, K.; Breitenstein, M.; Gehring, C.; Hutter, M. Scalability Analysis of Legged Robots for Space Exploration. In Proceedings of the Unlocking Imagination, Fostering Innovation and Strengthening Security: 68th International Astronautical Congress (IAC 2017), Adelaide, Australia, 25–29 September 2017. [Google Scholar]
- Wang, Y.; Du, X.; Zhang, H.; Zou, Q.; Law, J.; Yu, J. Amphibious Miniature Soft Jumping Robot with on-Demand in-Flight Maneuver. Adv. Sci. 2023, 10, 2207493. [Google Scholar] [CrossRef] [PubMed]




Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tang, G.; Yang, Q.; Lian, B. Design and Experimentation of Tensegrity Jumping Robots. Appl. Sci. 2024, 14, 3947. https://doi.org/10.3390/app14093947
Tang G, Yang Q, Lian B. Design and Experimentation of Tensegrity Jumping Robots. Applied Sciences. 2024; 14(9):3947. https://doi.org/10.3390/app14093947
Chicago/Turabian StyleTang, Guoxin, Qi Yang, and Binbin Lian. 2024. "Design and Experimentation of Tensegrity Jumping Robots" Applied Sciences 14, no. 9: 3947. https://doi.org/10.3390/app14093947
APA StyleTang, G., Yang, Q., & Lian, B. (2024). Design and Experimentation of Tensegrity Jumping Robots. Applied Sciences, 14(9), 3947. https://doi.org/10.3390/app14093947