
Validation of Computational Methods for Free-Water Jet Diffusion and Pressure Dynamics in a Plunge Pool




Abstract
1. Introduction
1.1. Background of High-Velocity Free-Water Jets
1.2. Previous Research on High-Velocity Jet Behavior
1.3. Numerical Approaches to Modeling High-Velocity Jets
1.4. Objective of the Study
2. Experimental Studies
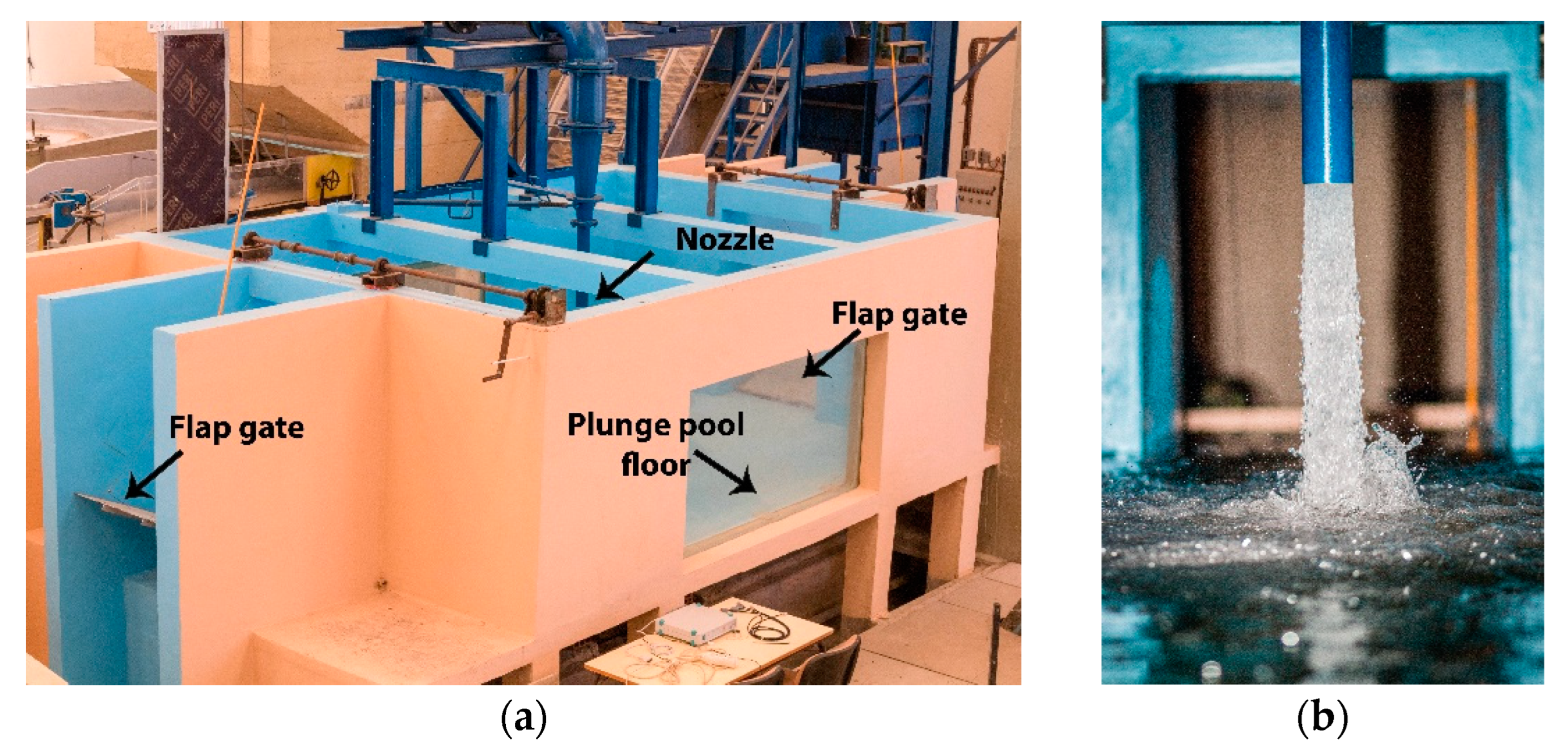
2.1. Experimental Setup
2.2. Experimental Data
3. Numerical Modeling
3.1. Solver Comparison
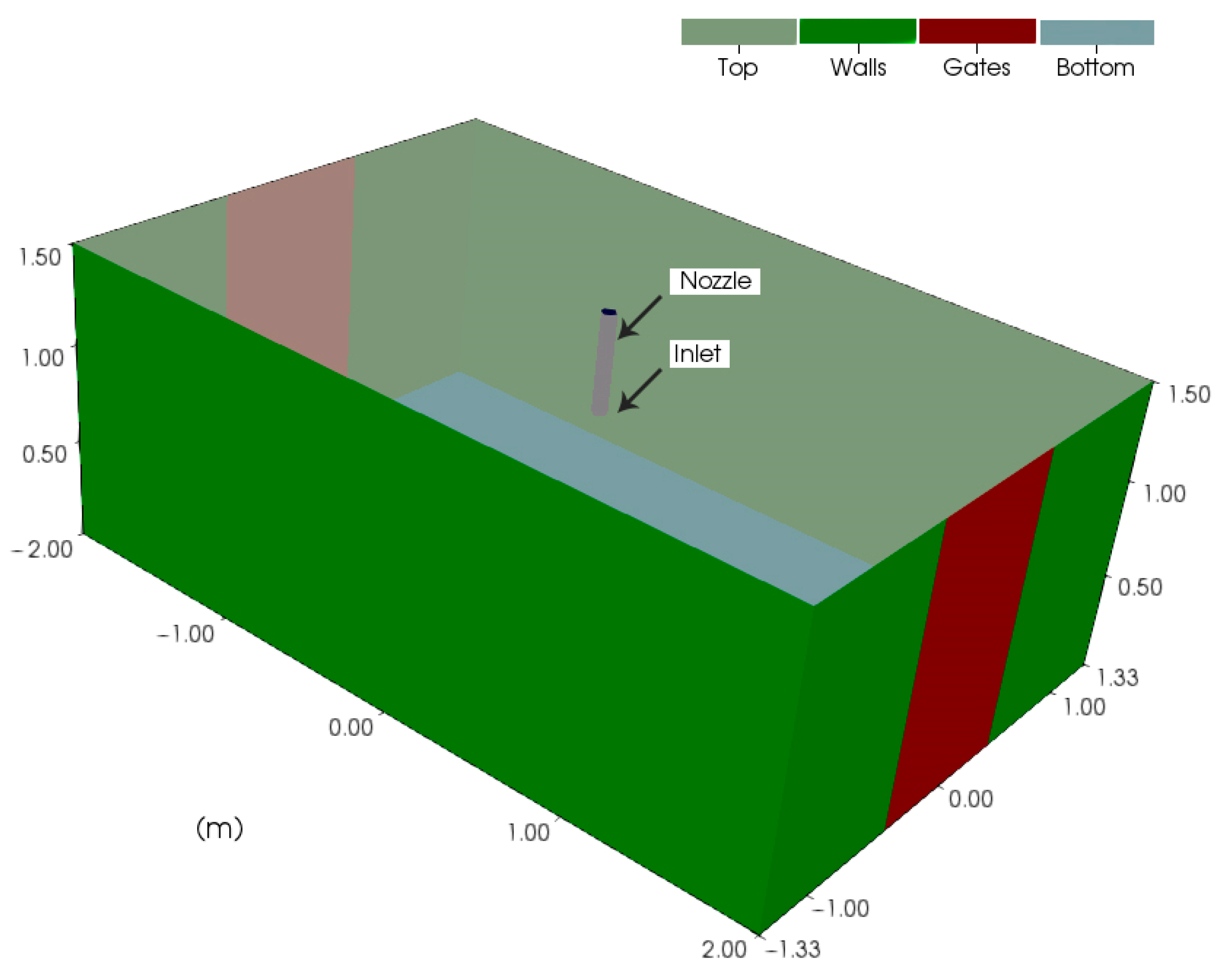
3.2. Numerical Domain, Boundary Conditions, and Numerical Schemes
3.3. Mesh
4. Results
4.1. Mesh Sensitivity Analysis
4.1.1. Dynamic Mean Pressure and Cell Size
4.1.2. Velocity and Cell Size
4.1.3. Air Concentration and Cell Size
4.2. Mesh and Model Selection
4.2.1. Mesh
4.2.2. Pressure Comparison
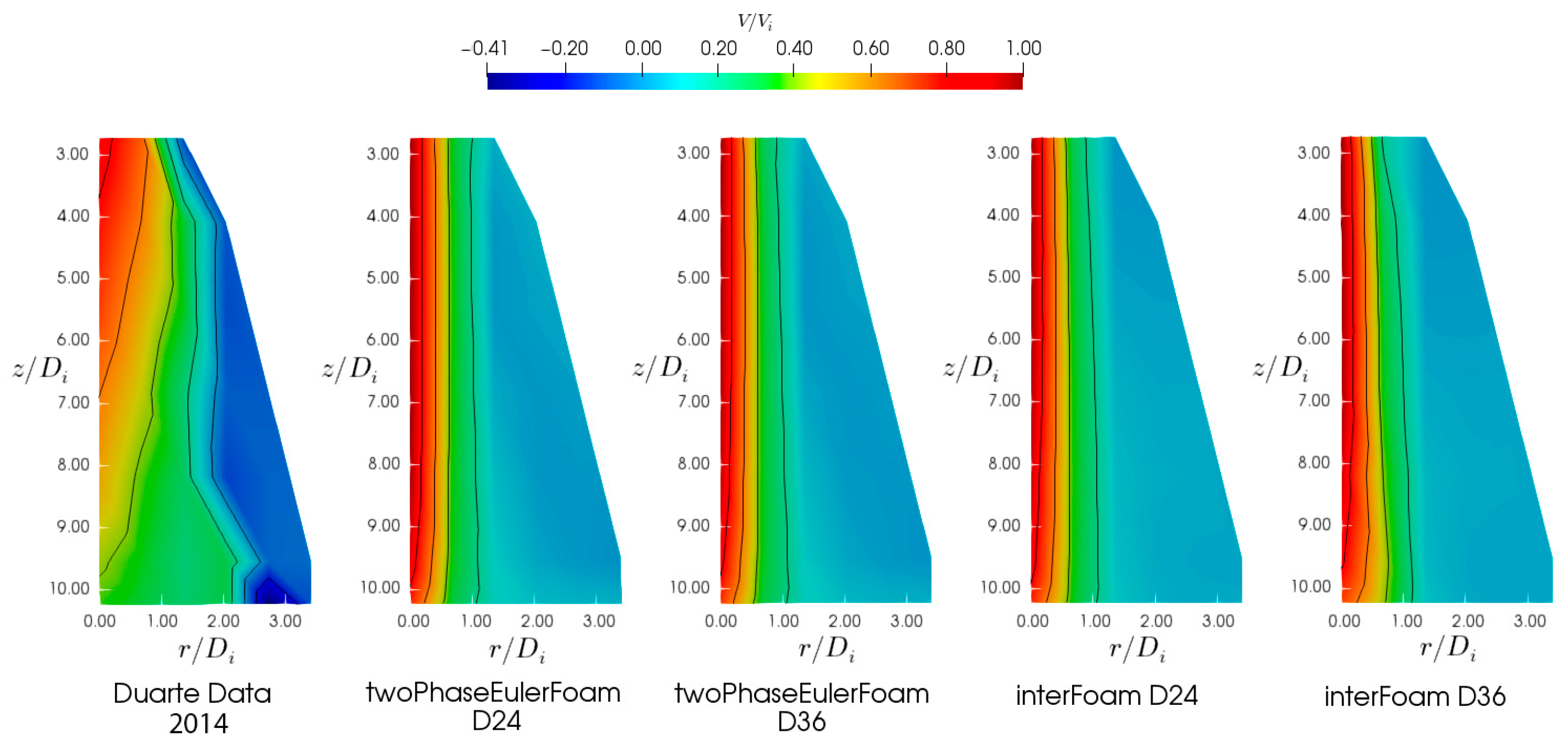
4.2.3. Velocity Field Analysis
4.2.4. Air Concentration Analysis
4.3. Boundary Layer Influence
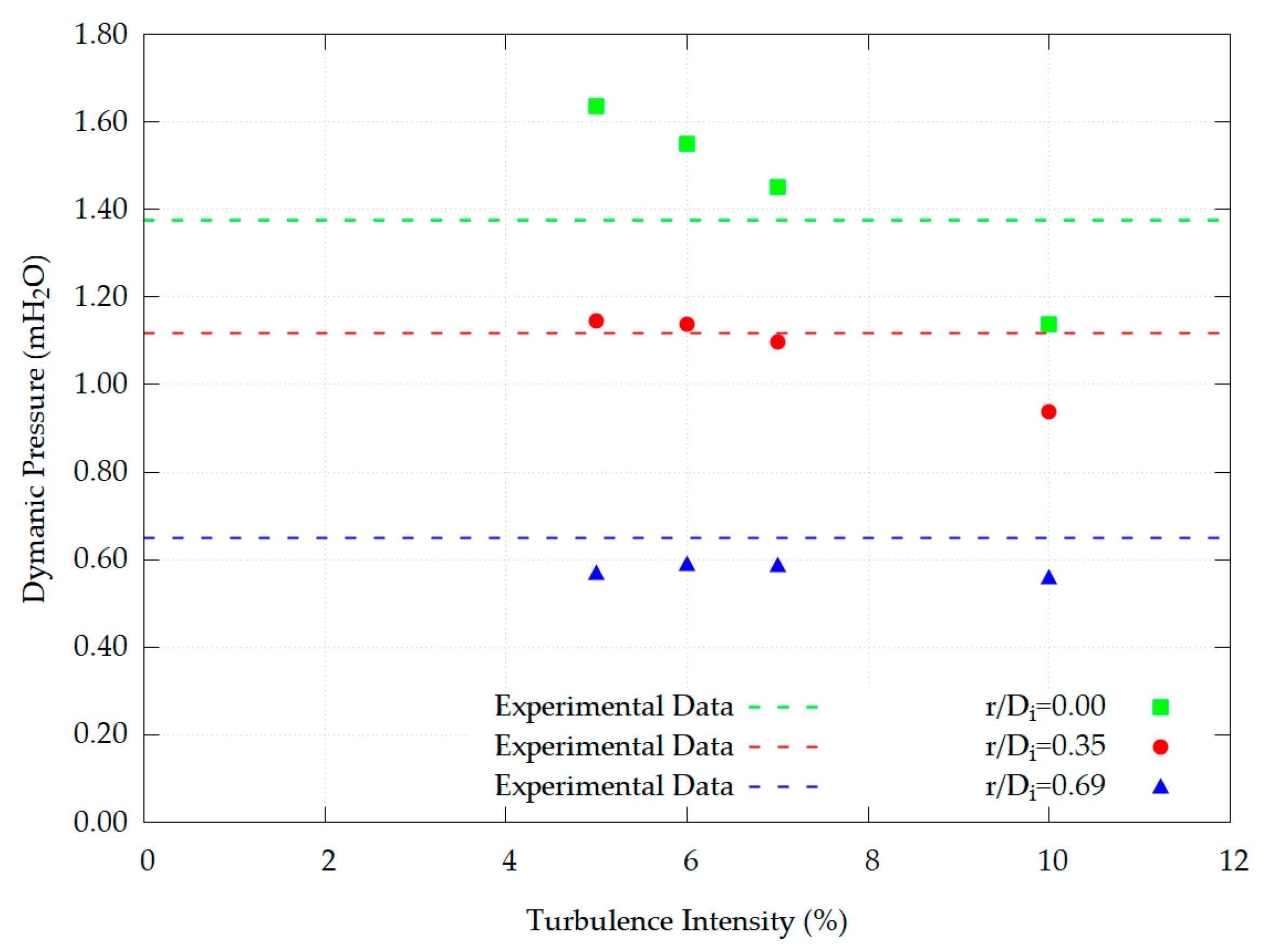
4.4. Initial Turbulent Conditions
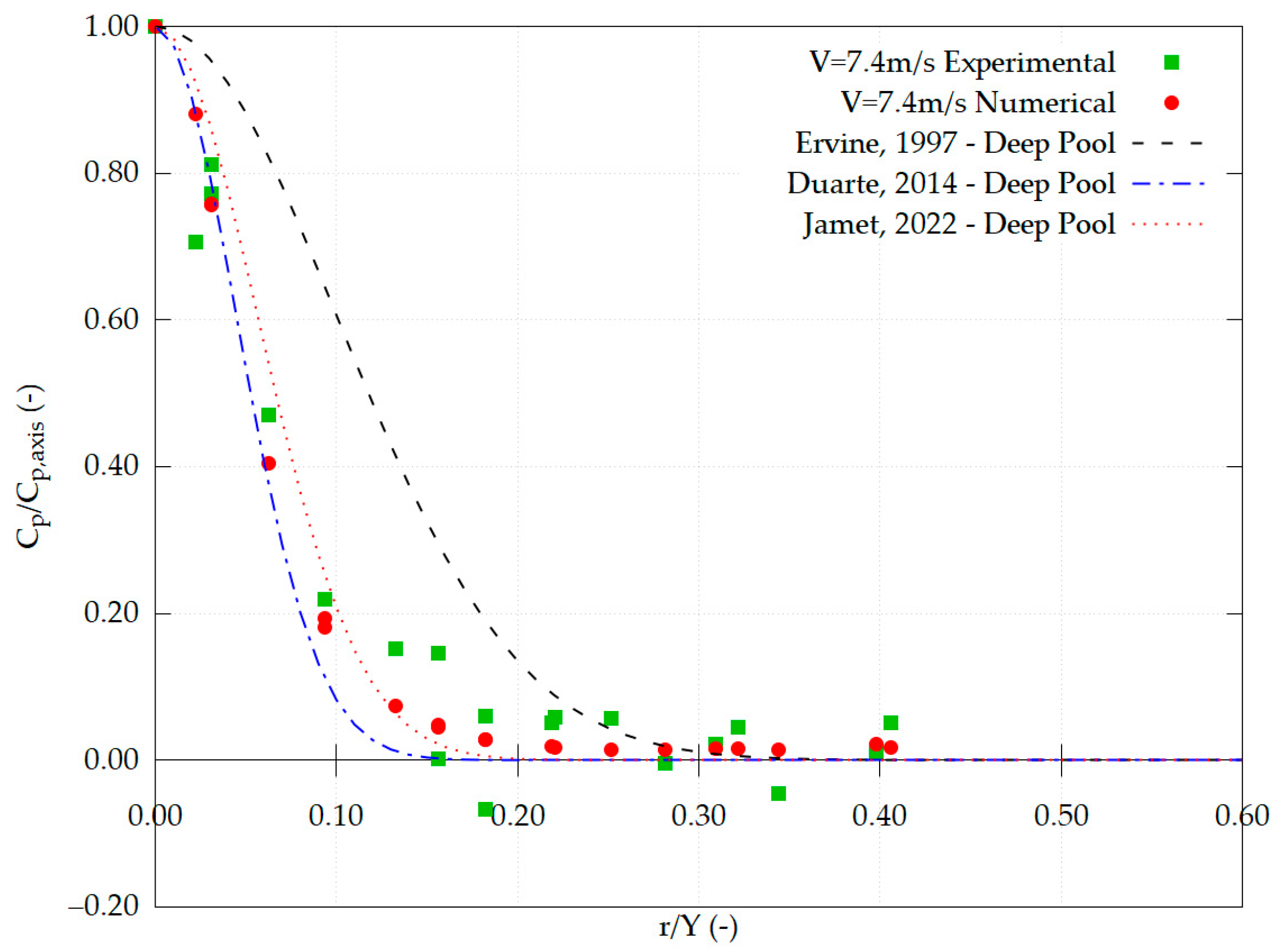
4.5. Dynamic Mean Pressure Distribution
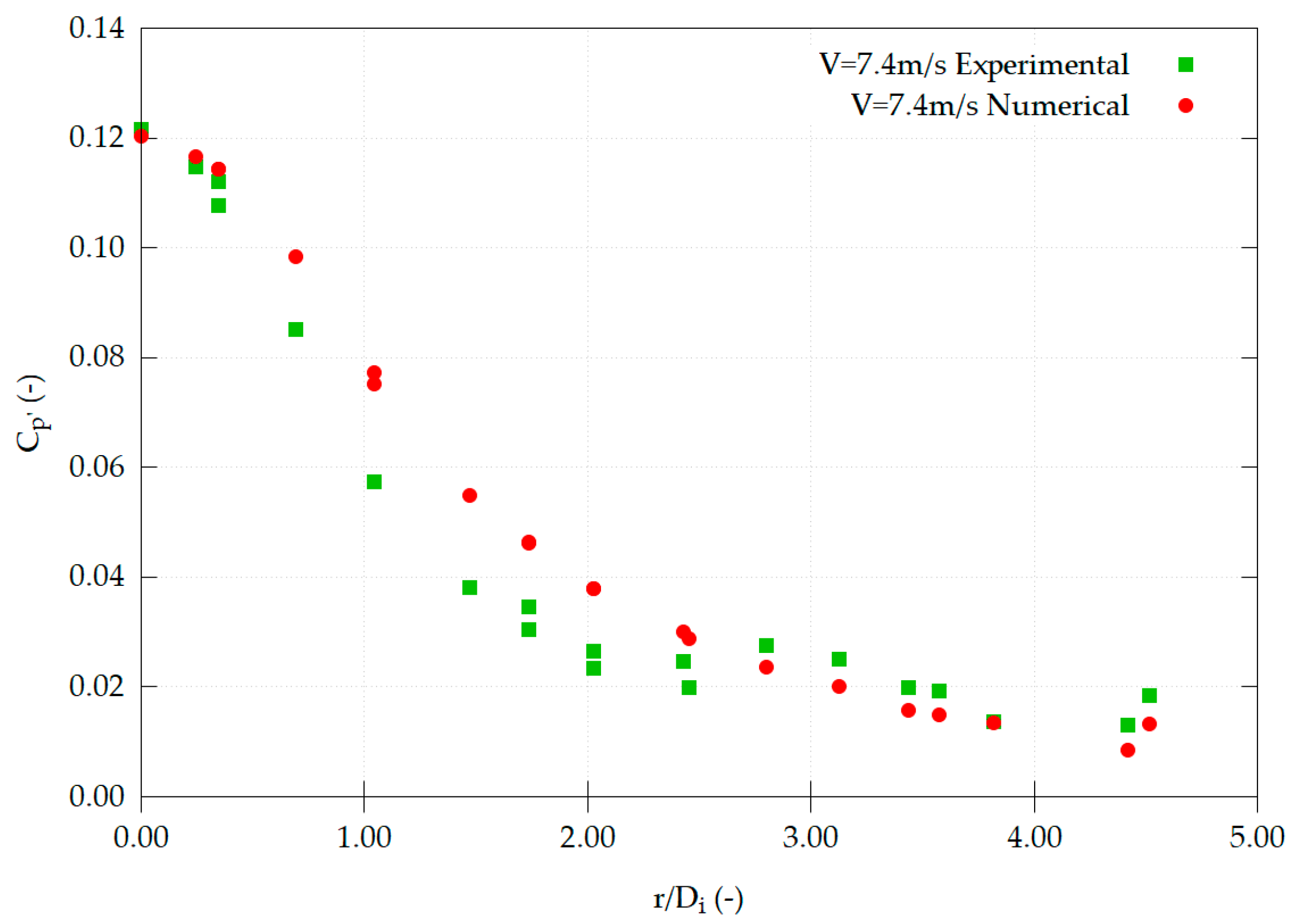
4.6. Turbulent Component of the Pressure
4.7. Jet Centerline Velocity
5. Discussion
5.1. Preliminary Results and Mesh Sensitivity Analysis
- Pressure and air concentration: TwoPhaseEulerFoam accurately reproduces stagnation point pressures and air concentrations.
- Velocity field: Both methodologies predict higher velocity fields than experimental data, but these estimates are consistent with prior research.
- Computational efficiency: Given similar computational costs, twoPhaseEulerFoam lower sensitivity to mesh quality allows for coarser meshes, reducing computational expenses without compromising accuracy.
5.2. Flow Characteristics of a 7.4 m/s Jet Impinging into a Plunge Pool with a Pool Depth of 0.8 m
6. Conclusions
- Different mesh resolutions were tested and labeled as D6, D12, D24, and D36, corresponding to meshes containing 6, 12, 24, and 36 cells along the jet diameter.
- TwoPhaseEulerFoam accurately simulated mean dynamic pressures with D24 and D36 meshes. For regions outside the jet stagnation point, acceptable results were achieved with D12 meshes.
- Both solvers predicted velocity fields higher than experimental values but remained comparable to each other.
- TwoPhaseEulerFoam provided more accurate and mesh-independent air concentration results, outperforming interFoam, whose VoF formulation struggled.
- Variations in turbulence intensity influenced pressure at the jet stagnation point, with differences of up to 26%. Outside this zone, turbulence effects were less pronounced.
- TwoPhaseEulerFoam coupled with the k-OmegaSST model cannot directly simulate pressure fluctuations. However, fluctuations derived from turbulent kinetic energy aligned well with experimental data, highlighting the solver’s potential with further refinements.
- Core zone: Persistent jet velocity over , consistent with prior studies.
- Established flow zone: Linear velocity decrease properly captured by the adopted numerical approach.
- Impingement zone: The velocity slope matched well with the findings of the literature.
- The study results point out the adequacy of the twoPhaseEulerFoam solver as a reliable tool for simulating jets in plunge pools, especially when:
- Accurate dynamic pressure and air concentration results are needed.
- Computational efficiency is a priority, as mesh independence is achieved with coarser meshes than with the interFoam-VoF solver.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Hartung, F.; Häusler, E. Scours, Stilling Basins and Downstream Protetion under Free Overfall Jets at Dams; Commission Internationale des Grands Barrages: Paris, France, 1973; pp. 39–55. [Google Scholar]
- ICOLD. Technical Advancements in Spillway Design—Progress and Innovations from 1985 to 2015; ICOLD Technical Committee on Hydraulics for Dams: Paris, Frande, 2016. [Google Scholar]
- Ervine, D.A.; Falvey, H.T.; Withers, W. Pressure fluctuations on plunge pool floors. J. Hydraul. Res. 1997, 35, 257–279. [Google Scholar] [CrossRef]
- Ervine, D.A.; Falvey, H.T. Behaviour of Turbulent Water Jets in the Atmosphere and in Plunge Pools. Proc. Inst. Civ. Eng. 1987, 83, 295–314. [Google Scholar] [CrossRef]
- Franzetti, S.; Tanda, M.G. Analysis of Turbulent Pressure Fluctuation Caused by a Circular Impinging Jet. In Proceedings of the International Symposium on New Technology in Model Testing in Hydraulic Research, Pune, India, 24–26 September 1987. [Google Scholar]
- May, R.W.P.; Willoughby, I.R. Impact pressures in plunge basins to vertical falling jets. HR Wallingford Report SR 1991, 242, 242. [Google Scholar]
- Castillo, L.G.; Carrillo, J.M.; Blázquez, A. Plunge pool dynamic pressures: A temporal analysis in the nappe flow case. J. Hydraul. Res. 2014, 53, 101–118. [Google Scholar] [CrossRef]
- Castillo, L.G.; Carrillo, J.M. Scour, velocities and pressures evaluations produced by spillway and outlets of dam. Water 2016, 8, 68. [Google Scholar] [CrossRef]
- Bollaert, E.F.R. Digital Rock Scour Cloud-Based Modelling and Engineering, 1st ed.; Taylor & Francis: Abingdon, UK, 2024. [Google Scholar]
- Bollaert, E.F.R. Transient Water Pressures in Joints and Formation of Rock Scour due to High-Velocity Jet Impact; Ecole Polytechnique Fédérale de Lausanne: Lausanne, Switzerland, 2002. [Google Scholar]
- Manso, P. The Influence of Pool Geometry and Induced Flow Patterns on Rock Scour By High-Velocity Plunging Jets; Ecole Polytechnique Fédérale de Lausanne: Lausanne, Switzerland, 2006. [Google Scholar]
- Duarte, R. Influence of Air Entrainment on Rock Scour Development and Block Stability in Plunge Pools; Ecole Polytechnique Fédérale de Lausanne: Lausanne, Switzerland, 2014. [Google Scholar]
- Federspiel, M.P.E.A. Response of an Embedded Block Impacted by High-Velocity Jets; Ecole Polytechnique Fédérale de Lausanne: Lausanne, Switzerland, 2011. [Google Scholar]
- Jamet, G.; Muralha, A.; Melo, J.F.; Manso, P.; De Cesare, G. Plunging Circular Jets: Experimental Characterization of Dynamic Pressures Near the Stagnation Zone. Water 2022, 14, 173. [Google Scholar] [CrossRef]
- Muralha, A.; Melo, J.F.; Ramos, H.M. Assessment of CFD Solvers and Turbulent Models for Water Free Jets in Spillways. Fluids 2020, 5, 104. [Google Scholar] [CrossRef]
- Chen, X.; Cheng, X. Progress in numerical simulation of high entrained air-water two-phase flow. In Proceedings of the International Conference on Digital Manufacturing & Automation, ICDMA 2012, Guilin, China, 31 July–2 August 2012; pp. 626–629. [Google Scholar]
- Mendes, L.S.; Lara, J.L.; Viseu, M.T. Should the two-phase Euler replace the volume-of fluid to simulate localized aeration in hydraulic structures? In Proceedings of the 12th Eastern European Young Water Professionals Conference, Riga, Latvia, 31 March–2 April 2021. [Google Scholar]
- Mendes, L.S.; Lara, J.L.; Viseu, M.T. Do the Volume-of-Fluid and the Two-Phase Euler Compete for Modeling a Spillway Aerator? Water 2021, 13, 3092. [Google Scholar] [CrossRef]
- Castillo, L.G.; Carrillo, J.M.; Sordo-Ward, Á. Simulation of overflow nappe impingement jets. J. Hydroinformatics 2014, 16, 922–940. [Google Scholar] [CrossRef]
- Anirban, G.; Barron, R.M.; Balachandar, R. Numerical simulation of high-speed turbulent water jets in air. J. Hydraul. Res. 2010, 48, 119–124. [Google Scholar]
- Castillo, L.G.; Carrillo, J.M.; Bombardelli, F.A. Distribution of mean flow and turbulence statistics in plunge pools. J. Hydroinformatics 2017, 19, 173–190. [Google Scholar] [CrossRef]
- Badas, M.G.; Rossi, R.; Garau, M. May a standard VOF numerical simulation adequately complete spillway laboratory measurements in an operational context? The case of Sa Stria Dam. Water 2020, 12, 1606. [Google Scholar] [CrossRef]
- Maleki, S.; Apostolidis, J.; Ewing, T.; Fiorotto, V. CFD Simulation of Pressure Fluctuations in Plunge Pools: In Search of a New Method. In Proceedings of the Australian National Committee of Large Dams ANCOLD, Hobrat, Australia, 26–27 October 2017. [Google Scholar]
- Bollaert, E.; Schleiss, A. Scour of rock due to the impact of plunging high velocity jets Part I: A state-of-the-art review. J. Hydraul. Res. 2003, 41, 451–464. [Google Scholar] [CrossRef]
- Jamet, G. Plunging Circular Jets: Experimental Characterization of Dynamic Pressures Near the Stagnation Zone. Master Thesis, Ecole Polytechnique Fédérale de Lausanne, Lausanne, Switzerland, 2022. [Google Scholar]
- Duarte, R. Air Concentrations in Plunge Pools Due to Aerated Plunging High-Velocity Jets and Dynamic Pressures in Underlying Fissures. In Proceedings of the 35th IAHR World Congress, Chengdu, China, 8–13 September 2013; pp. 1–10. [Google Scholar]
- Chanson, H. Hydraulics of aerated flows: Qui pro quo? J. Hydraul. Res. 2013, 51, 223–243. [Google Scholar] [CrossRef]
- OpenCFD. OpenFOAM v1906. 2019. Available online: www.openfoam.com (accessed on 5 January 2025).
- Hirt, C.W.; Nichols, B.D. Volume of fluid (VOF) method for the dynamics of free boundaries. J. Comput. Phys. 1981, 3, 201–225. [Google Scholar]
- Deshpande, S.S.; Anumolu, L.; Trujillo, M.F. Evaluating the performance of the two-phase flow solver interFoam. Comput. Sci. Discov. 2012, 5, 014016. [Google Scholar] [CrossRef]
- Rusche, H. Computational Fluid Dynamics of Dispersed Two-Phase Flows at High Phase Fractions. Ph. D. Thesis, Imperial College London, London, UK, 2002. [Google Scholar]
- OpenFOAM User Guide. 2018. Available online: https://www.openfoam.com/documentation/user-guide (accessed on 3 October 2018).
- Manafpour, M.; Ebrahimnezhadian, H. The Multiphase Capability of Openfoam CFD Toolbox in Solving Flow Field in Hydraulic Structure. In Proceedings of the 4th International Conference on Long-Term Behavior and Eco-Friendly Dams, Tehran, Iran, 18–20 October 2017; pp. 323–330. [Google Scholar]
- Behzadi, A.; Issa, R.I.; Rusche, H. Modelling of dispersed bubble and droplet flow at high phase fractions. Chem. Eng. Sci. 2004, 59, 759–770. [Google Scholar] [CrossRef]
- Manso, P.; Bollaert, E.F.R.; Schleiss, A.J. Evaluation of high-velocity plunging jet-issuing characteristics as a basis for plunge pool analysis Evaluation of high-velocity plunging jet-issuing characteristics as a basis for plunge pool analysis. J. Hydraul. Res. 2008, 46, 147–157. [Google Scholar] [CrossRef]
- Higuera, P.; Lara, J.L.; Losada, I.J. Realistic wave generation and active wave absorption for Navier-Stokes models. Application to OpenFOAM®. Coast. Eng. 2013, 71, 102–118. [Google Scholar] [CrossRef]
- Menter, F.R.; Kuntz, M.; Langtry, R. Ten Years of Industrial Experience with the SST Turbulence Model Turbulence heat and mass transfer. Heat Mass Transf. 2003, 4, 625–632. [Google Scholar]
- Menter, F.R. Two-equation eddy-viscosity turbulence models for engineering applications. AIAA J. 1994, 32, 1598–1605. [Google Scholar] [CrossRef]
- Lopez de Bertodano, M. Turbulent Bubbly Two-Phase Flow in a Triangular Duct; Rensselaer Polytechnic Institute: New York, NY, USA, 1992. [Google Scholar]
- Burns, A.D.; Frank, T.; Hamill, I.; Shi, J.M. The Favre averaged drag model for turbulent dispersion in Eulerian multi-phase flows. In Proceedings of the 5th International Conference on Multiphase Flow, Yokohama, Japan, 30 May–4 June 2004; pp. 1–17. [Google Scholar]
- Gosman, A.D.; Lekakou, C.; Politis, S.; Issa, R.I.; Looney, M.K. Multidimensional modeling of turbulent two-phase flows in stirred vessels. AIChE J. 1992, 38, 1946–1956. [Google Scholar] [CrossRef]
- Mendes, L.S.; Lara, J.L.; Viseu, M.T. Is the Volume-of-Fluid Method Coupled with a Sub-Grid Bubble Equation Efficient for Simulating Local and Continuum Aeration? Water 2021, 13, 1535. [Google Scholar] [CrossRef]
- Schulze, L.; Thorenz, C. The Multiphase Capabilities of the CFD Toolbox OpenFOAM for Hydraulic Engineering Applications. In Lehfeldt, Rainer; Kopmann, Rebekka (Hg.): ICHE 2014. Proceedings of the 11th International Conference on Hydroscience & Engineering, Hamburg, Germany, 28 September–2 October 2014; Bundesanstalt für Wasserbau: Karlsruhe, Germany, 2014; pp. 1007–1014. [Google Scholar]
- Giralt, F.; Chia, C.J.; Trass, O. Characterization of impingement region in an axisymmetric turbulent jet. Ind. Eng. Chem. Fundam. 1977, 16, 21–28. [Google Scholar] [CrossRef]
- McKeogh, E.J.; Elsawy, E.M. Air Retained in Pool by Plunging Water Jet. J. Hydraul. Div. 1980, 106, 1577–1593. [Google Scholar] [CrossRef]
- Albertson, M.L.; Dai, Y.B.; Jensen, R.A.; Rouse, H. Diffusion of Submerged Jets. Proc. Am. Soc. Civ. Eng. 1948, 74, 1571–1596. [Google Scholar] [CrossRef]
- Beltaos, S.; Rajaratnam, N. Impinging Circular Turbulent Jets. J. Hydraul. Div. 1974, 100, 1313–1328. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| (-) | Number of Cells in the Boundary Layer | ||
|---|---|---|---|
| 4 | 8 | 16 | |
| 0.00 | −1.0% | 4.2% | −1.9% |
| 0.25 | −2.4% | 2.7% | −1.5% |
| 0.35 | −3.2% | 1.4% | −1.6% |
| 0.69 | −0.1% | −1.2% | −1.3% |
| 1.04 | 0.3% | −2.1% | −0.8% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Muralha, A.; Melo, J.F.; Ramos, H.M. Validation of Computational Methods for Free-Water Jet Diffusion and Pressure Dynamics in a Plunge Pool. Appl. Sci. 2025, 15, 1963. https://doi.org/10.3390/app15041963
Muralha A, Melo JF, Ramos HM. Validation of Computational Methods for Free-Water Jet Diffusion and Pressure Dynamics in a Plunge Pool. Applied Sciences. 2025; 15(4):1963. https://doi.org/10.3390/app15041963
Chicago/Turabian StyleMuralha, António, José F. Melo, and Helena M. Ramos. 2025. "Validation of Computational Methods for Free-Water Jet Diffusion and Pressure Dynamics in a Plunge Pool" Applied Sciences 15, no. 4: 1963. https://doi.org/10.3390/app15041963
APA StyleMuralha, A., Melo, J. F., & Ramos, H. M. (2025). Validation of Computational Methods for Free-Water Jet Diffusion and Pressure Dynamics in a Plunge Pool. Applied Sciences, 15(4), 1963. https://doi.org/10.3390/app15041963