
Autonomous Vehicles in Rural Areas: A Review of Challenges, Opportunities, and Solutions



Abstract
1. Introduction
- How do AV deployment strategies differ between urban and rural environments? [Section 3.2]
- What mobility, safety, environmental, and economic benefits could the deployment of AVs bring to rural communities? [Section 3.3.1]
- What are the key challenges for AV deployment in rural areas? [Section 3.3.2]
- What infrastructure and technological modifications are necessary for the successful deployment of AVs in rural regions? [Section 3.3.3 and Section 3.3.4]
- What roles do public perception and community engagement play in the adoption of AVs in rural settings? [Section 3.3.5]
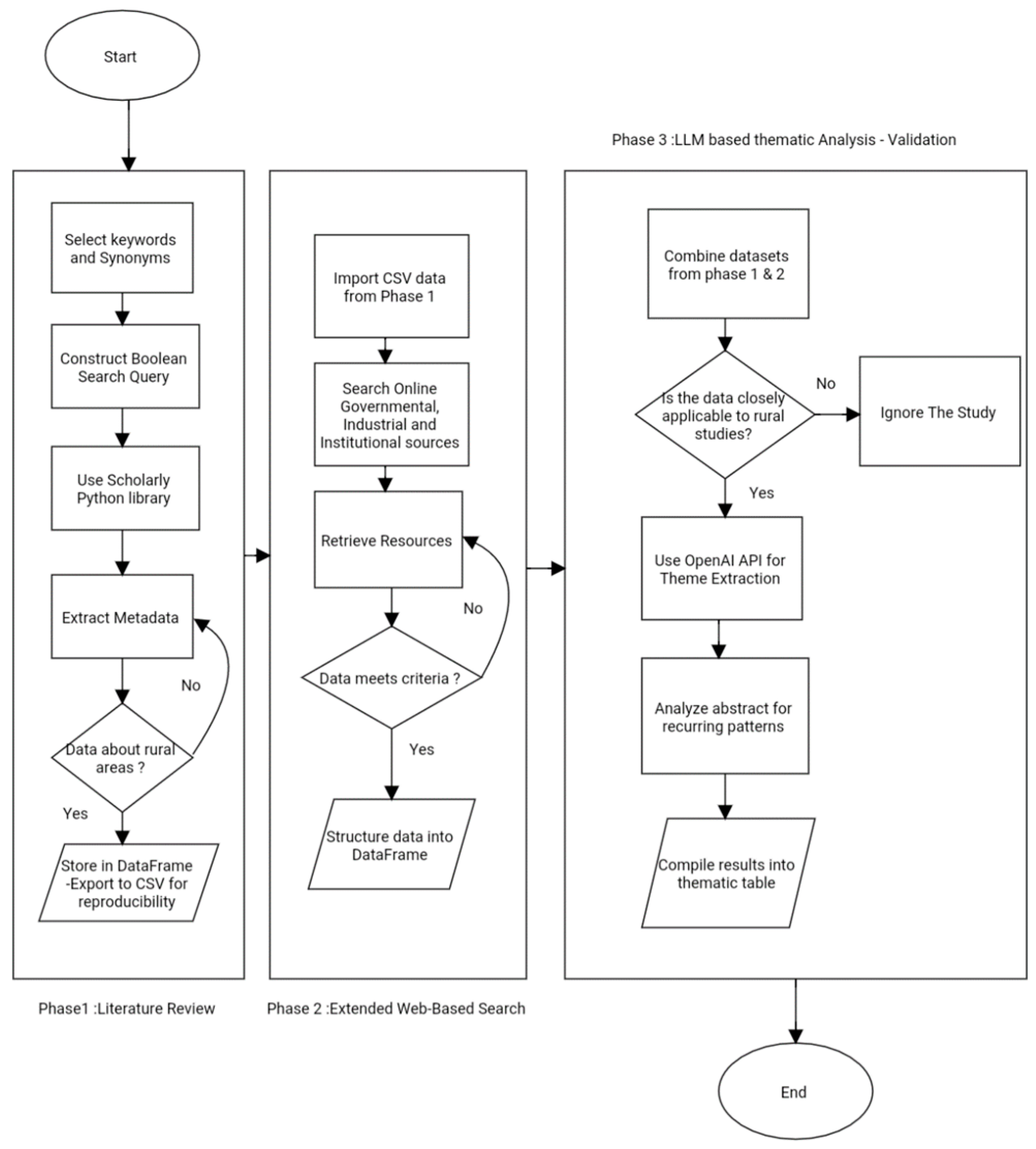
2. Materials and Methodology
3. Results
3.1. Field Test-Based Studies for AVs Deployment in Rural Areas
3.2. AV Simulation-Based Studies in Rural Areas
3.3. Future of AV Deployment in Rural Areas
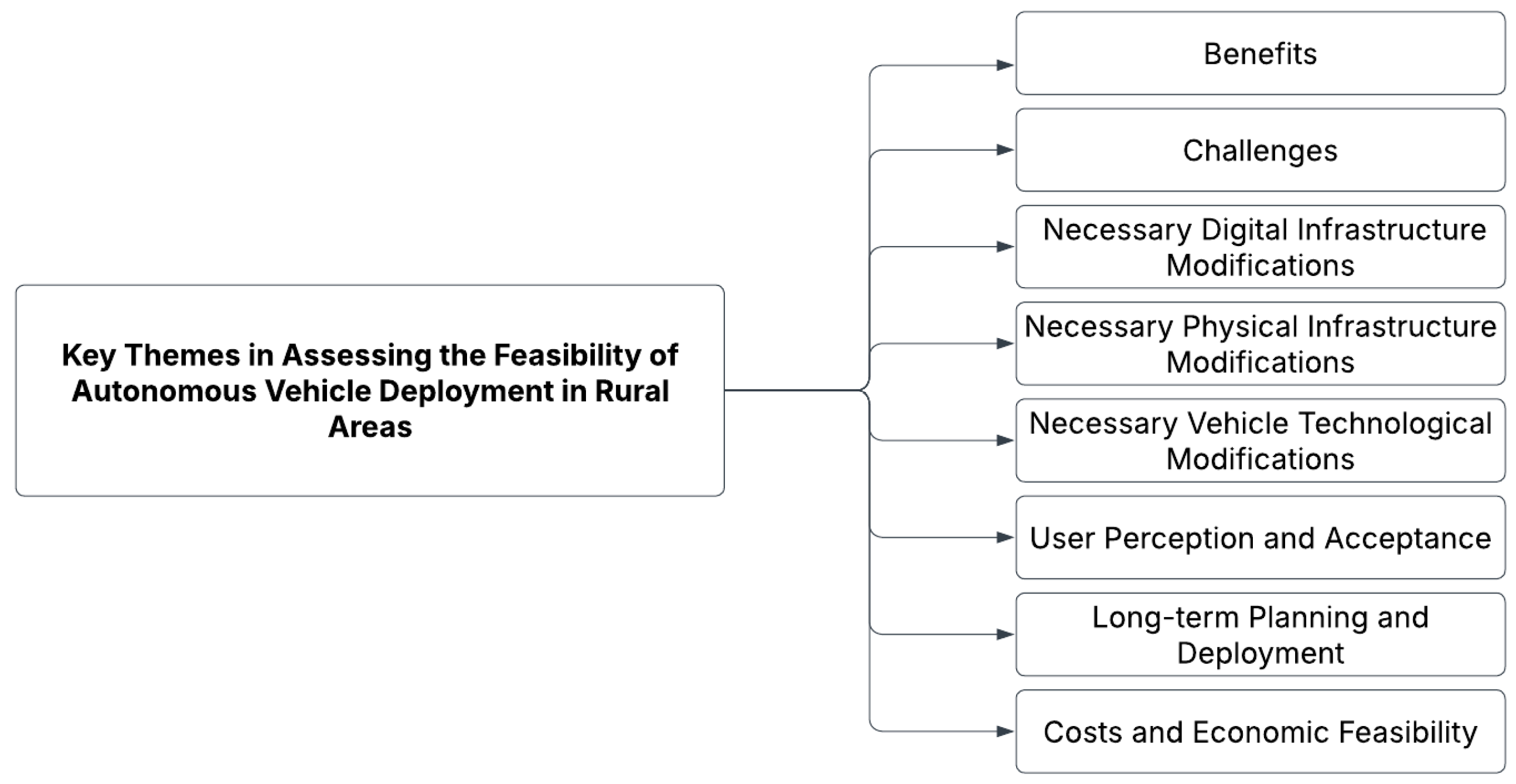
3.3.1. Benefits
3.3.2. Challenges
3.3.3. Necessary Infrastructure Modifications
3.3.4. Necessary Technological Modifications
3.3.5. User Perception and Acceptance
3.3.6. Long-Term Planning and Deployment
3.3.7. Costs and Economic Feasibility
4. Discussions
5. Limitations
6. Conclusions and Future Works
- Implement AV Services on Fixed Routes with Upgraded Infrastructure: Initial deployments should focus on well-defined fixed routes that connect key community locations such as hospitals, schools, and downtown hubs. These routes should be equipped with reliable physical infrastructure, clear lane markings, signage, and maintained surfaces to provide stable environments for AV operation.
- Define Minimum Operational Criteria for Rural Road Readiness: Establishing standardized guidelines for physical and digital road features (e.g., road geometry, lane visibility, V2X readiness) can guide both public and private investments and create a common benchmark for AV service eligibility.
- Launch Scalable and Diverse Pilot Projects: Pilot programs like goMARTI and ADS for Rural America demonstrate the value of phased AV testing. Future pilots should include more diverse geographic, road condition settings, and seasonal conditions to better capture the range of rural challenges and inform broader, long-term planning.
- Invest in Community Education and Engagement: Public trust is essential for adoption. Community-focused campaigns, including informational sessions, AV demonstrations, and ride-alongs, can familiarize residents with AVs and address concerns around safety, privacy, and job displacement.
- Promote Shared AV Mobility Services: Shared-use AV models, such as on-demand shuttle services, can enhance cost-efficiency and access in sparsely populated areas, especially for older adults and non-drivers. Public–private partnerships and subsidies will be essential to make such services financially sustainable.
- Focus Infrastructure Improvements on Dual Benefits: Investments such as high-contrast lane markings, digital signage, rural charging infrastructure, and improved cellular/V2X communication networks will benefit both AVs and human drivers. These investments enhance safety and reliability within a mixed traffic flow, and their economic viability remains strong even during the early stages of AV integration.
- Equip AVs for Rural-Specific Environmental Challenges: AV performance should be enhanced under conditions like gravel roads, steep gradients, wildlife crossings, and weather events (snow, fog, glare) with features like adaptive suspension, traction control, and thermal battery management.
- Support Open Data and Collaborative Research: Regional and national databases on AV performance in rural areas, rural traffic behavior, and infrastructure conditions should be shared across academia, government, and industry to accelerate innovation and reduce redundant efforts.
- What infrastructure modifications can be implemented within a 5-year timeframe to accommodate AVs in rural U.S. regions?
- How can AVs be adapted to operate reliably in adverse weather conditions common to rural areas like the Midwest, Great Plains, and Northeast?
- What public engagement strategies are most effective in fostering trust and encouraging adoption among diverse rural populations?
- How can we ensure equitable access to AV technologies across income groups and geographies?
- What are the long-term impacts of AV deployment on rural mobility, safety, local economies, and environmental sustainability?
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- United States Department of Transportation. Rural Transportation Statistics; United States Department of Transportation: Washington, DC, USA, 2025.
- U.S. Department of Transportation. Rural Roadway Safety; U.S. Department of Transportation: Washington, DC, USA, 2025.
- National Highway Traffic Safety Administration and United States Department of Transportation. Rural/Urban Comparison of Motor Vehicle Traffic Fatalites; U.S. Department of Transportation: Washington, DC, USA, 2024.
- National Highway Traffic Safety Administration Traffic Safety Countermeasures that Work in Rural Communities. Available online: https://www.transportation.gov/rural/traffic-safety-countermeasures (accessed on 12 February 2025).
- National Institute of Health. World’s Older Population Grows Dramatically; National Institute of Health: Bowie, MD, USA, 2016. [Google Scholar]
- Vigne, B.; Orjuela, R.; Lauffenburger, J.P.; Basset, M. Overtaking on two-lane two-way rural roads: A personalized and reactive approach for automated vehicle. Transp. Res. Part C Emerg. Technol. 2024, 166, 104800. [Google Scholar] [CrossRef]
- Brett, J.A. Thinking Local about Self-Driving Cars: A Local Framework for Autonomous Vehicle Development in the United States. Master’s Thesis, University of Washington, Washington, DC, USA, 2016. [Google Scholar]
- Kaufleitner, M.; Steinhardt, G. Autonomous Driving Opportunities, Challenges and Risks of Self-Driving Cars in Rural Areas from a User’s Perspective Software Engineering & Internet Computing. Available online: https://shorturl.at/iIfYq (accessed on 3 April 2025).
- Beitz, L. Sustainable Mobility in Rural Areas Based on Autonomous Vehicles and Mobility On-Demand: A Pre-Feasibility Study for Lower Austria. Master Thesis, Technische Universität Wien, Vienna, Austria, 2016. [Google Scholar] [CrossRef]
- Eddy, M.M.; Davidson, S.; Chang, A.; Neelakantan, R.; Viita, K. Rural Connected Vehicle Gap Analysis Factors Impeding Deployment and Recommendations for Moving Forward; U.S. Department of Transportation: Washington, DC, USA, 2017.
- Manawadu, U.; Ishikawa, M.; Kamezaki, M.; Sugano, S. Analysis of Individual Driving Experience in Autonomous and Human-Driven Vehicles Using a Driving Simulator. In Proceedings of the 2015 IEEE International Conference on Advanced Intelligent Mechatronics (AIM), Busan, Republic of Korea, 7–11 July 2015; p. 132. [Google Scholar]
- Chmielewski, C. Self-Driving Cars and Rural Areas: The Potential for a Symbiotic Relationship. J. Law Commer. 2019, 37, 57. [Google Scholar] [CrossRef]
- Prioleau, D.; Dames, P.; Alikhademi, K.; Gilbert, J.E. Barriers to the Adoption of Autonomous Vehicles in Rural Communities. In International Symposium on Technology and Society, Proceedings; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2020; pp. 91–98. [Google Scholar] [CrossRef]
- Norman, J. Assessing the Potential for Improving Public Transport in Rural Areas by Using Driverless Vehicles. 2019. Available online: https://stsprogrammet.se/wp-content/uploads/2019/10/1910_Joel_Norman.pdf (accessed on 3 April 2025).
- Walters, J.G.; Meng, X.; Xu, C.; Jing, H.; Marsh, S. Rural positioning challenges for connected and autonomous vehicles. In ION 2019 International Technical Meeting Proceedings; Institute of Navigation: Manassas, VA, USA, 2019; pp. 828–842. [Google Scholar] [CrossRef]
- von Mörner, M. Demand-Oriented Mobility Solutions for Rural Areas Using Autonomous Vehicles; Elsevier: Amsterdam, The Netherlands, 2019. [Google Scholar]
- Mobility Services Outside the Cities Development of Mobility Services in Rural Areas with Self-Driving Technology Toussaint Ishimwe Thomas Lindén. Available online: https://uu.diva-portal.org/smash/get/diva2:1239149/FULLTEXT01.pdf (accessed on 3 April 2025).
- Sieber, L.; Ruch, C.; Hörl, S.; Axhausen, K.W.; Frazzoli, E. Improved public transportation in rural areas with self-driving cars: A study on the operation of Swiss train lines. Transp. Res. Part A Policy Pract. 2020, 134, 35–51. [Google Scholar] [CrossRef]
- Imhof, S.; Frölicher, J.; von Arx, W. Shared Autonomous Vehicles in rural public transportation systems. Res. Transp. Econ. 2020, 83, 100925. [Google Scholar] [CrossRef]
- Pettersson, F.; Khan, J. Smart Public Transport in Rural Areas: Prospects, Challenges and Policy Needs; Emerald Publishing Limited: New Delhi, India, 2020. [Google Scholar]
- Axelrod, C.W. Autonomous Vehicles Meet Inhospitable Roadways. In Proceedings of the 2019 IEEE Long Island Systems, Applications and Technology Conference (LISAT), Farmingdale, NY, USA, 3 May 2019. [Google Scholar]
- Alghamdi, A.A.; Zhang, G.; Chen, R. Feasibility of Cav Delivery Service in Rural Areas. Ph.D. Thesis, The University of Hawaii, Honolulu, HI, USA, 2020. [Google Scholar]
- Theoto, T.N.; Kaminski, P.C. A country-specific evaluation on the feasibility of autonomous vehicles. Prod. Manag. Dev. 2019, 17, 123–133. [Google Scholar] [CrossRef]
- United States Department of Transportation—Federal Transit Administration. Automated Driving Systems (ADS) for Rural America Demonstration Data Management Plan (DMP). 2020. Available online: https://www.transit.dot.gov/sites/fta.dot.gov/files/2020-10/FTA-Research-Report-No-0174.pdf (accessed on 4 April 2025).
- Nie, Q. Preparing Small Urban Areas for Shared Mobility with Autonomous Vehicles: A Case Study of College Town. Ph.D. Thesis, University of Alabama Libraries, Tuscaloosa, AL, USA, 2020. [Google Scholar]
- David, K. Copp, Studying Volunteer Driver Programs to Inform Transportation Planning for Autonomous Vehicles in Rural Areas. Master’s Thesis, The University of New Brunswick, Saint John, NB, Canada, 2019. [Google Scholar]
- Prioleau, D.; Dames, P.; Alikhademi, K.; Gilbert, J.E. Autonomous Vehicles in Rural Communities: Is It Feasible? Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2021. [Google Scholar] [CrossRef]
- Hinderer, H.; Stegmüller, J.; Schmidt, J.; Jessica, S.; Lucke, J. Acceptance of Autonomous Vehicles in Suburban Public Transport, An empirical study on requirements and prerequisites expected by inhabitants. In Proceedings of the 2018 IEEE International Conference on Engineering, Technology and Innovation (ICE/ITMC), Stuttgart, Germany, 17–20 June 2018. [Google Scholar]
- Schlüter, J.; Bossert, A.; Rössy, P.; Kersting, M. Impact assessment of autonomous demand responsive transport as a link between urban and rural areas. Transp. Bus. Manag. 2021, 39, 100613. [Google Scholar] [CrossRef]
- Lidynia, C.; Liehner, G.L.; Ziefle, M. Put Some Drive in Your Country–Need for and Acceptance of Autonomously Operating Services in Rural Areas of Germany; Springer: Berlin/Heidelberg, Germany, 2021; pp. 348–364. [Google Scholar] [CrossRef]
- Wu, X.; Cao, J.; Douma, F. The impacts of vehicle automation on transport-disadvantaged people. Transp. Res. Interdiscip. Perspect. 2021, 11, 100447. [Google Scholar] [CrossRef]
- Wang, S.; Jiang, Z.; Noland, R.B.; Mondschein, A.S. Attitudes towards privately-owned and shared autonomous vehicles. Transp. Res. Part F Traffic Psychol. Behav. 2020, 72, 297–306. [Google Scholar] [CrossRef]
- Federal Transit Administration. ADS For Rural America Fact Sheet; Federal Transit Administration: Washington, DC, USA, 2021. Available online: https://www.transit.dot.gov/sites/fta.dot.gov/files/2021-08/University-of-Iowa-Fact-Sheet_0.pdf (accessed on 8 April 2025).
- Dowds, J.; Sullivan, J.; Rowangould, G.; Aultman-Hall, L. Consideration of Automated Vehicle Benefits and Research Needs for Rural America: A Research Report from the National Center for Sustainable Transportation; National Center for Sustainable Transportation: Los Angeles, CA, USA, 2021. [Google Scholar] [CrossRef]
- Hudson, J.; Orviska, M.; Hunady, J. People’s attitudes to autonomous vehicles. Transp. Res. Part A Policy Pract. 2019, 121, 164–176. [Google Scholar] [CrossRef]
- Douma, F.; Winer, E. The Grand Iron Range CAV Initiative: History, Partnerships, and Community Engagement. 2024. Available online: https://conservancy.umn.edu/items/42a15f3e-b76e-4b3f-8c38-0a9fc29a99ff (accessed on 28 February 2025).
- Minnesota Department of Transportation; Center for Transportation Studies- University of Minnesota. The Gomarti Self-Driving Shuttle Pilot Program; Center for Transportation Studies: Minneapolis, MN, USA, 2024. [Google Scholar]
- Li, W.; Ye, X.; Li, X.; Dadashova, B.; Ory, M.; Lee, C.; Rathinam, S.; Usman, M.; Chen, A.; Bian, J.; et al. Autonomous Vehicles for Small Town: Exploring Perception, Mobility, and Safety; U.S. Department of Transportation (US DOT): Washington, DC, USA, 2023.
- Chang, K.; Williams, J. The Perception of Autonomous Driving in Rural Communities Final Project Report; U.S. Department of Transportation (US DOT): Washington, DC, USA, 2023.
- National Park Service. Park Planning, Facilities and Lands Directorate Park Facility Management Division National Park Service Automation in Our Parks: Automated Shuttle Pilots at Yellowstone National Park and Wright Brothers National Memorial; National Park Service: Washington, DC, USA, 2022. [Google Scholar]
- Abohassan, M.; El-Basyouny, K. Leveraging LiDAR-Based Simulations to Quantify the Complexity of the Static Environment for Autonomous Vehicles in Rural Settings. Sensors 2024, 24, 452. [Google Scholar] [CrossRef]
- Cazares, J.G.; Damnjanovic, I.; Kim, Y.W. Evaluating the Performance of an Integrated Control Framework for Connected Autonomous Vehicles in Simulated Rural Environments; ASCE: Reston, VA, USA, 2023. [Google Scholar]
- Tillman, R.; Weber, C.; Hudson, A. Drive MN Final Report, December 2022. Available online: https://www.cts.umn.edu/sites/cts.umn.edu/files/2023-03/Drive-MN-Final-Report.pdf (accessed on 3 April 2025).
- Walters, J.G. Rural Implementation of Connected, Autonomous and Electric Vehicles. Ph.D. Thesis, University of Nottingham, Nottingham, UK, 2022. [Google Scholar]
- National Park Service. NPS Emerging Mobility: Summary Evaluation of Low-Speed Automated Shuttle Pilots at NPS Sites; Preliminary Draft; National Park Service: Washington, DC, USA, 2022.
- Joshua, C.; Kendall, M.; Amalia, H.; Machek, E.; Sudano, S.; Crayton, T.; Patel, R.; Good, A.; Wong, K.; Suder, S. First in Flight, First in Automation: NCDOT and NPS Pilot an Automated Shuttle at the Wright Brothers National Memorial; U.S. Department of Transportation: Washington, DC, USA, 2022.
- Ohio Deployments of Automated Vehicles Highlight Unique Considerations for Rural Environments. DriveOhio, Ohio Department of Transportation: Columbus, OH, USA, 2024. Available online: https://drive.ohio.gov/about-driveohio/news/rural-ads (accessed on 14 March 2025).
- Carney, C. Phase 4 (Unmarked Roads) Evaluation Report; Driving Safety Research Institute, The University of Iowa: Iowa City, IA, USA, 2022. [Google Scholar]
- Carney, C. Phase 5 (Connected Vehicles) Evaluation Report; Driving Safety Research Institute, The University of Iowa: Iowa City, IA, USA, 2023. [Google Scholar]
- Mason, J.; Carney, C.; Gaspar, J. Autonomous Shuttle Operating on Highways and Gravel Roads in Rural America: A Demonstration Study. Geriatrics 2022, 7, 140. [Google Scholar] [CrossRef] [PubMed]
- Alghamdi, A.; Prevedouros, P.D. Evaluation of Delivery Service in Rural Areas with Cav Final Project Report; U.S. Department of Transportation: Washington, DC, USA, 2022.
- Khan, S.M.; Salek, M.S.; Harris, V.; Comert, G.; Morris, E.A.; Chowdhury, M. Autonomous Vehicles for All? ACM J. Auton. Transp. Syst. 2024, 1, 1–8. [Google Scholar] [CrossRef]
- Masello, L.; Sheehan, B.; Murphy, F.; Castignani, G.; McDonnell, K.; Ryan, C. From Traditional to Autonomous Vehicles: A Systematic Review of Data Availability. In Transportation Research Record; SAGE Publications Ltd.: London, UK, 2022; Volume 2676, pp. 161–193. [Google Scholar] [CrossRef]
- Carney, C.; Kaiser, T.J.; Ahmad, O. Automated Vehicles in Rural America What’s the Holdup? Iowa, Minnesota. October 2023. Available online: https://adsforruralamerica.uiowa.edu/sites/adsforruralamerica.uiowa.edu/files/2023-10/Carney%2C%20Johnson-Kaiser%2C%20and%20Ahmad.pdf (accessed on 1 December 2024).
- Gössling, S.; Freytag, T.; Humpe, A.; Scuttari, A. Keeping older people mobile: Autonomous transport services in rural areas. Transp. Res. Interdiscip. Perspect. 2023, 18, 100778. [Google Scholar] [CrossRef]
- Fujiu, M.; Morisaki, Y. Takayama. Impact of Autonomous Vehicles on Traffic Flow in Rural and Urban Areas Using a Traffic Flow Simulator. Sustainability 2024, 16, 658. [Google Scholar] [CrossRef]
- Emory, K.; Douma, F.; Cao, J. Autonomous vehicle policies with equity implications: Patterns and gaps. Transp. Res. Interdiscip. Perspect. 2022, 13, 100521. [Google Scholar] [CrossRef]
- Hasnat, M.M.; Bardaka, E.; Samandar, M.S. Differential impacts of autonomous and connected-autonomous vehicles on household residential location. Travel Behav. Soc. 2023, 32, 100570. [Google Scholar] [CrossRef]
- Zhong, H.; Wang, K.; Li, W.; Burris, M.W.; Sinha, K.C. An urban-rural divide? Preferences for autonomous vehicles in small and med-sized metropolitan areas. Appl. Geogr. 2024, 169, 103324. [Google Scholar] [CrossRef]
- Usman, M.; Li, W.; Bian, J.; Chen, A.; Ye, X.; Li, X.; Dadashova, B.; Lee, C.; Lee, K.; Rathinam, S.; et al. Small and rural towns’ perception of autonomous vehicles: Insights from a survey in Texas. Transp. Plan. Technol. 2024, 47, 200–225. [Google Scholar] [CrossRef]
- Gale, M. Comparing the Intent to Use Autonomous Vehicles Between Rural and Urban Areas. Master’s Thesis, University of Twente, Enschede, The Netherlands, 2022. [Google Scholar]
- Stephen, N.; Sivakumar, R. Technology to Ensure Equitable Access to Automated Vehicles for Rural Areas; U.S. Department of Transportation: Washington, DC, USA, 2023.
- Ivanov, S.A.I.; Rasheed, B. Predicting the Behavior of Road Users in Rural Areas for Self-Driving Cars. Adv. Eng. Res. 2023, 23, 169–179. [Google Scholar] [CrossRef]
- Wang, N.; Tang, H.; Wang, Y.J.; Huang, G.Q. Antecedents in rural residents’ acceptance of autonomous vehicles. Transp. Res. Part D Transp. Environ. 2024, 132, 104244. [Google Scholar] [CrossRef]
- Matute, J.; Rodriguez-Arozamena, M.; Perez, J.; Karimoddini, A. Sensor Fusion-Based Localization Framework for Autonomous Vehicles in Rural Forested Environments. In IEEE Conference on Intelligent Transportation Systems, Proceedings, ITSC; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2023; pp. 1007–1013. [Google Scholar] [CrossRef]
- Agnello, G.; Uprety, I.; Zhao, X. Poster: An Efficient Road Detection Framework for Supporting Autonomous Driving in Rural Areas. In Proceedings-2024 IEEE International Conference on Mobility, Operations, Services and Technologies, MOST 2024; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2024; pp. 283–285. [Google Scholar] [CrossRef]
- CASSI, North Carolina Department of Transportation. Available online: https://www.ncdot.gov/divisions/integrated-mobility/innovation/cassi/Pages/default.aspx (accessed on 15 January 2025).
- DriveOhio. Ohio Rural Automated Driving Systems (ADS) Project Final Evaluation Report; DriveOhio: Columbus, OH, USA, 2024. [Google Scholar]
- Ohio Rural Automated Driving Systems; DriveOhio, Ohio Department of Transportation: Columbus, OH, USA, 2021. Available online: https://drive.ohio.gov/programs/av-cv/rural-automated-driving-systems (accessed on 20 February 2025).
- IOWA Driving Safety Research Institute. ADS For Rural America. Available online: https://adsforruralamerica.uiowa.edu/ (accessed on 1 December 2024).
- Minnesota’s Autonomous Rural Transit Initiative. The goMARTI Self-Driving Shuttle. Available online: https://www.gomarti.com/ (accessed on 23 March 2025).
- MnCAV Ecosystem, University of Minnesota. About Drive MN. Available online: https://mncav.umn.edu/outreach/drivemn (accessed on 1 December 2024).
- Joshua, C.; Kendall, M.; Amalia, H.; Elizabeth, M.; Travis, C. Automated Shuttle Pilots at Yellowstone National Park and Wright Brothers National Memorial; U.S. Department of Transportation: Washington, DC, USA, 2022.
- Carney, C. ADS For Rural America Reports; Driving Safety Research Institute, The University of Iowa: Iowa City, IA, USA, 2023. [Google Scholar]
- Carney, C. Phase 1 (Controlled-Access Divided Highway/Interstate) Evaluation Report; Driving Safety Research Institute, The University of Iowa: Iowa City, IA, USA, 2021. [Google Scholar]
- Carney, C. Phase 2 (Two Lane Undivided Highway and On-and Off-Ramps) Evaluation Report; Driving Safety Research Institute, The University of Iowa: Iowa City, IA, USA, 2022. [Google Scholar]
- Carney, C. Phase 6 (Parking Areas/Full Route) Evaluation Report; Driving Safety Research Institute, The University of Iowa: Iowa City, IA, USA, 2023. [Google Scholar]
- Automated Driving Systems (ADS) for Rural America, HEXAGON, Autonomy and Positioning Division. Available online: https://autonomoustuff.com/products/case-studies/ads-rural-america (accessed on 3 April 2025).
- Iowa Driving Safety Research Institute. Data Collection for ADS For Rural America. Available online: https://data.adsforruralamerica.uiowa.edu/ (accessed on 1 December 2024).
- Carney, C.; Roe, C.; Ahmad, O. Safety Management Plan Automated Driving System Demonstration; ADS For Rural America, Iowa 2021. Available online: https://adsforruralamerica.uiowa.edu/ADS-safety-plan (accessed on 3 April 2025).
- Burdette, L. In Rural Minnesota, the GoMARTI Self-Driving Shuttle Demo Is Paving the Way for Autonomous Transit. CTS News (Catalyst), 6 August 2024. [Google Scholar]
- Minnesota’s Autonomous Rural Transit Initiative, “goMARTI Stop List”. 2025. Available online: https://www.gomarti.com/hours-location (accessed on 31 March 2025).
- National Park Service. Park Planning, Facilities and Lands Directorate Park Facility Management Division NPS Emerging Mobility: Summary Evaluation of Low-Speed Automated Shuttle Pilots at NPS Sites; National Park Service: Washington, DC, USA, 2022.
- Searcy, S.; Good, A.C. Autonomous Shuttle Supporting Innovation (CASSI) Program Developmen, Final Report, North Carolina Department of Transportation. 2025. Available online: https://rosap.ntl.bts.gov/view/dot/80392 (accessed on 3 April 2025).
- Ohio Department of Transportation. D.A.T.A. in Ohio: Deploying Automated Technology Anywhere. Ohio Department of Transportation: Columbus, OH, USA, 2019. [Google Scholar]
- Leiman, L.; Archilla, A.R.; May, A.D. NCHRP Project 3-55(3) Capacity And Quality of Service of Two-Lane Highways Task 6 Enhance, Calibrate, and Validate the Selected Simulation Model TWOPAS Model Improvements; University of California: Berkeley, CA, USA, 1999. [Google Scholar]
- Hoban, C.J.; Shephard, R.J.; Fawcett, G.J. A model for simulating traffic on two-lane rural roads—User guide and manual for TRARR version 3.2. In Technical Manual ATM No. 10B; Australian Road Research Board: Melbourne, VIC, Australia, 1991. [Google Scholar]
- Brodin, A.; Carlsson, A. The VTI Traffic Simulation Model—A Description of the Model and Programme System; Swedish National Road and Transport Research Institute (VTI): Linköping, Sweden, 1986. [Google Scholar]
- Tapani, A. A Versatile Model for Rural Road Traffic Simulation. In A Versatile Model for Rural Road Traffic Simulation, Proceedings of the 84th Annual Meeting of the Transportation Research Board, Washington, DC, USA, 9–13 January 2005; The National Academies of Sciences, Engineering, and Medicine: Washington, DC, USA, 2005. [Google Scholar]
- Olstam, J.J. A Model for Simulation and Generation of Surrounding Vehicles in Driving Simulators; UniTryck: Linköping, Sweden, 2005. [Google Scholar]
- Olstam, J. Simulation of Surrounding Vehicles in Driving Simulators; LiU-tryck: Linköping, Sweden, 2009. [Google Scholar]
- Carney, C. Phase 3 (Urban Driving-Roads through Cities and Towns) Evaluation Report; Driving Safety Research Institute, The University of Iowa: Iowa City, IA, USA, 2022. [Google Scholar]
- Searcy, S.; Curran, S. Connected and Autonomous Shuttle Supporting Innovation (CASSI) in Cary’s Bond Park; Final Report, North Carolina Department of Transportation. 2023. Available online: https://rosap.ntl.bts.gov/view/dot/73005 (accessed on 3 April 2025).
- Searcy, S. Connected and Autonomous Shuttle Supporting Innovation at UNC Charlotte, July 2024. Available online: https://rosap.ntl.bts.gov/view/dot/78968 (accessed on 3 April 2025).
- Lazányi, K. Perceived Risks of Autonomous Vehicles. Risks 2023, 11, 26. [Google Scholar] [CrossRef]
- Das, S.; Dutta, A.; Fitzpatrick, K. Technological perception on autonomous vehicles: Perspectives of the non-motorists. Technol. Anal. Strat. Manag. 2020, 32, 1335–1352. [Google Scholar] [CrossRef]
- Hilgarter, K.; Granig, P. Public perception of autonomous vehicles: A qualitative study based on interviews after riding an autonomous shuttle. Transp. Res. Part F Traffic Psychol. Behav. 2020, 72, 226–243. [Google Scholar] [CrossRef]
- Ansarinejad, M.; Huang, Y.; Qiu, A. Impact of Fog on Vehicular Emissions and Fuel Consumption in a Mixed Traffic Flow with Autonomous Vehicles (AVs) and Human-Driven Vehicles Using VISSIM Microsimulation Model; International Conference on Transportation and Development: Atlanta, GA, USA, 2023. [Google Scholar]
- Maddineni, V.K.; Ansarinejad, M.; Ahmed, M.M. Safety and operational impacts of different Autonomous Vehicle operations on freeway work zones. Adv. Transp. Stud. 2024, 4, 117–126. [Google Scholar]
- Chen, C.; Zhao, X.; Liu, H.; Ren, G.; Zhang, Y.; Liu, X. Assessing the Influence of Adverse Weather on Traffic Flow Characteristics Using a Driving Simulator and VISSIM. Sustainability 2019, 11, 830. [Google Scholar] [CrossRef]
- Huang, Y.; Ansarinejad, M.; Lu, P. Assessing Mobility under Inclement Weather Using VISSIM Microsimulation—A Case Study In U.S. In Proceedings of the 9th International Conference on Civil Structural and Transportation Engineering (ICCSTE’24), Toronto, ON, Canada, 12–16 June 2024; AVESTIA Publishing: Orleans, ON, Canada, 2024. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Project Name/Author; Year | Organization | Type * | Route/Road Types |
|---|---|---|---|
| DriveOhio Project; (2023–2024) [69] | Drive Ohio (U.S. DOT) | Demo | Fixed and on-demand |
| ADS for Rural America Project; (2021–2023) [70] | University of Iowa | Demo | Fixed routes |
| Mason et al.; (2022) [50] | University of Iowa | Demo | Fixed routes |
| Joseph George Walters; (2022) [44] | University of Nottingham | Demo | On-Demand routes |
| goMARTI Project; (2022–2024) [71] | Minnesota’s May Mobility | Deploy | On-Demand routes |
| DriveMN Project; (2022) [72] | Minnesota DOT | Deploy | Fixed routes |
| CASSI Project; (2020, 2021, 2023) [67] | North Carolina DOT | Demo | Fixed Blacktop, parking lots |
| TEDDY Project; (2022) [73] | National Park Service | Demo | Fixed Blacktop, parking lots |
| Study | Year | Country | Software | Main Goal |
|---|---|---|---|---|
| Johan Olstam [91] | 2009 | Sweden | VTISim Model | Enhance the realism of driving simulators for rural traffic conditions |
| Manawadu et al. [11] | 2015 | Japan | Driving Simulator | Evaluate driving experiences under autonomous and human-driven modes |
| Joel Norman [14] | 2019 | Sweden | Discrete-event simulation model | Assess AV integration in rural public transport systems |
| Schlüter et al. [29] | 2021 | Germany | MATSim | Evaluate DRT systems’ economic and environmental viability |
| Walters et al. [44] | 2022 | England | Agent-based simulation framework | Replace low-utilization train lines with AMoD systems |
| Cazares et al. [42] | 2023 | USA | Microscopic traffic simulation framework | Enhance safety and control for AVs and CAVs |
| Abohassan et al. [41] | 2024 | Canada | VISTA simulator | Assess AV data processing requirements |
| Vigne et al. [6] | 2024 | France | Carmaker realistic simulator | Improve safety and comfort for CAV overtaking |
| Fujiu et al. [56] | 2024 | Japan | Aimsun SDK | Evaluate AV impact on traffic flow |
| Technological | Environmental | Infrastructure | Policy and Demographic |
|---|---|---|---|
| Sensor misdetections, Unreliable responses to unmarked roads | Extreme weather conditions | Faded or low-contrast markings | Financial constraints |
| GPS and localization failures | Unpaved roads, steep gradients | Inconsistent lane designs | Cultural skepticism toward AV technologies |
| Battery performance issues | Sharp curves with limited visibility | High infrastructure costs | Limited funding for rural transportation projects |
| Miscommunication at intersections | Dynamic lighting transitions (shade to sunlight) | Unregulated intersections (roundabouts, stop signs) | Lack of local expertise and operational data |
| Software malfunctions | Obstacles (animals, farming equipment, pedestrians) | Shortage of charging stations | High deployment costs |
| Object detection failures | Vegetation near roads | Need for frequent HD mapping updates | Demographic barriers |
| Difficulty reversing in automated parking | Active construction zones with confusing markings | Limited connectivity-ready roads | |
| Frequent disengagements of automation systems | Roadside variability (curves, hills, dynamic lanes) | Insufficient digital infrastructure |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ansarinejad, M.; Ansarinejad, K.; Lu, P.; Huang, Y.; Tolliver, D. Autonomous Vehicles in Rural Areas: A Review of Challenges, Opportunities, and Solutions. Appl. Sci. 2025, 15, 4195. https://doi.org/10.3390/app15084195
Ansarinejad M, Ansarinejad K, Lu P, Huang Y, Tolliver D. Autonomous Vehicles in Rural Areas: A Review of Challenges, Opportunities, and Solutions. Applied Sciences. 2025; 15(8):4195. https://doi.org/10.3390/app15084195
Chicago/Turabian StyleAnsarinejad, Melika, Kian Ansarinejad, Pan Lu, Ying Huang, and Denver Tolliver. 2025. "Autonomous Vehicles in Rural Areas: A Review of Challenges, Opportunities, and Solutions" Applied Sciences 15, no. 8: 4195. https://doi.org/10.3390/app15084195
APA StyleAnsarinejad, M., Ansarinejad, K., Lu, P., Huang, Y., & Tolliver, D. (2025). Autonomous Vehicles in Rural Areas: A Review of Challenges, Opportunities, and Solutions. Applied Sciences, 15(8), 4195. https://doi.org/10.3390/app15084195