
Design of a Morphing Aircraft Based on Model Predictive Control



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
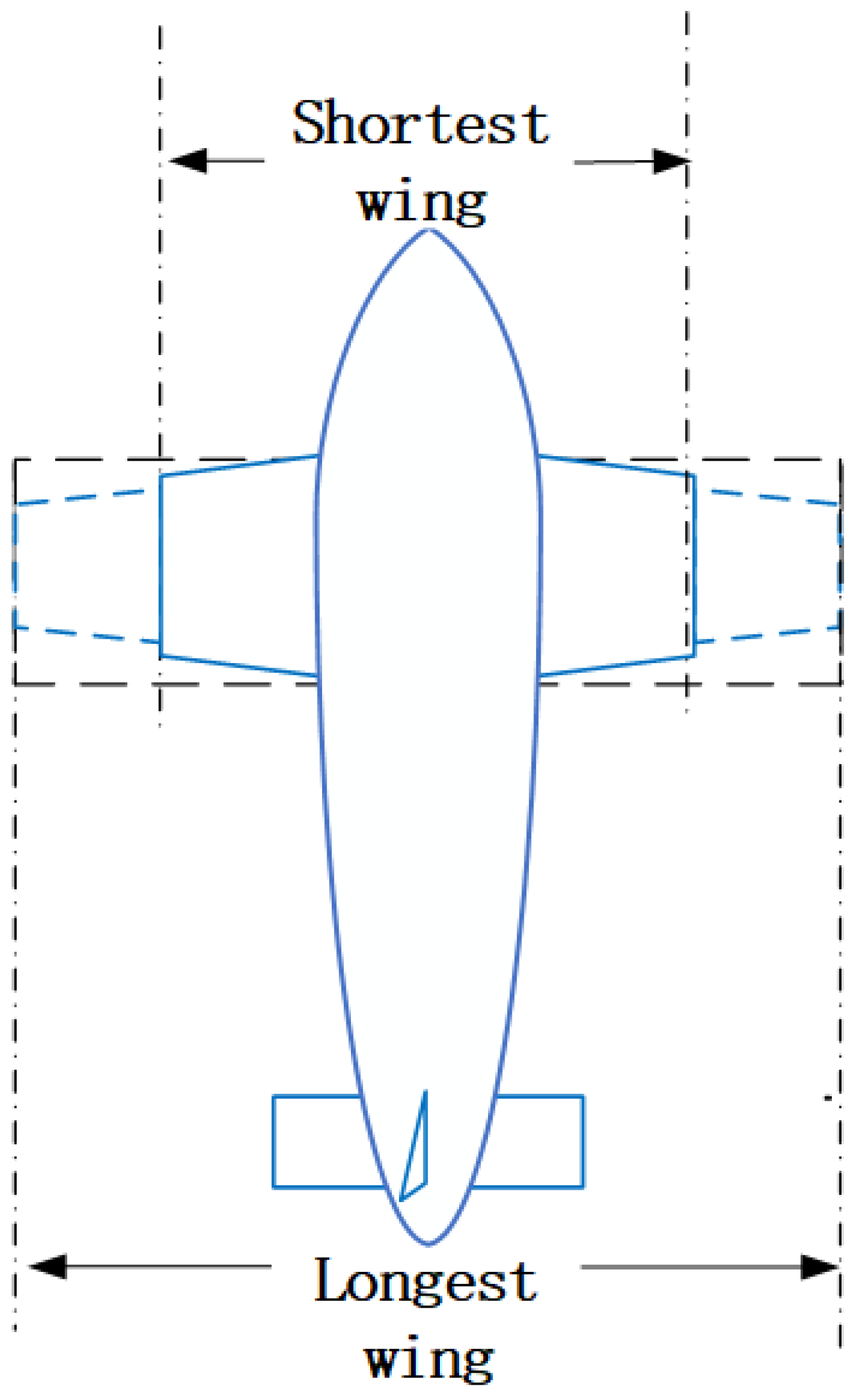
2. Mathematical Model of a Morphing Aircraft
2.1. Nonlinear Dynamic Model
- The curvature of the Earth’s surface is neglected, adopting the so-called “flat Earth assumption”.
- The ground coordinate system is considered an inertial reference frame.
- The gravitational acceleration g is treated as a constant, ignoring variations with altitude.
- The morphing aircraft is assumed to be a rigid body, and its mass m remains constant throughout the entire flight process, including the structural morphing phase.
- The engine of the morphing aircraft is installed along the body’s longitudinal axis, and the thrust T passes through the aircraft’s center of mass with zero offset angle. This means the thrust acts only along the longitudinal axis and does not generate thrust-induced moments.
- The morphing aircraft performs level, sideslip-free flight, satisfying and , where is the roll angle, is the sideslip angle, and p and r are the roll rate and yaw rate, respectively.
2.2. LPV Description of Nonlinear Systems
3. Controller Design
3.1. Model Predictive Controller Design
3.2. Design of a Robust Model Predictive Control Strategy Using Set Containment as an Optimization Metric
- S1:
- .
- S2:
- For all , there exists a control input such that .
4. Numerical Simulation
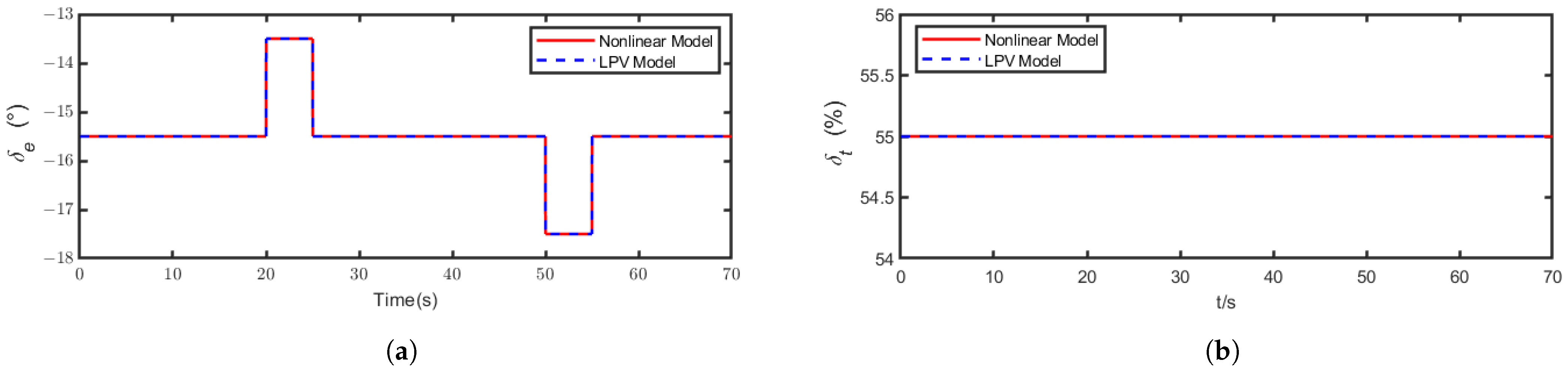
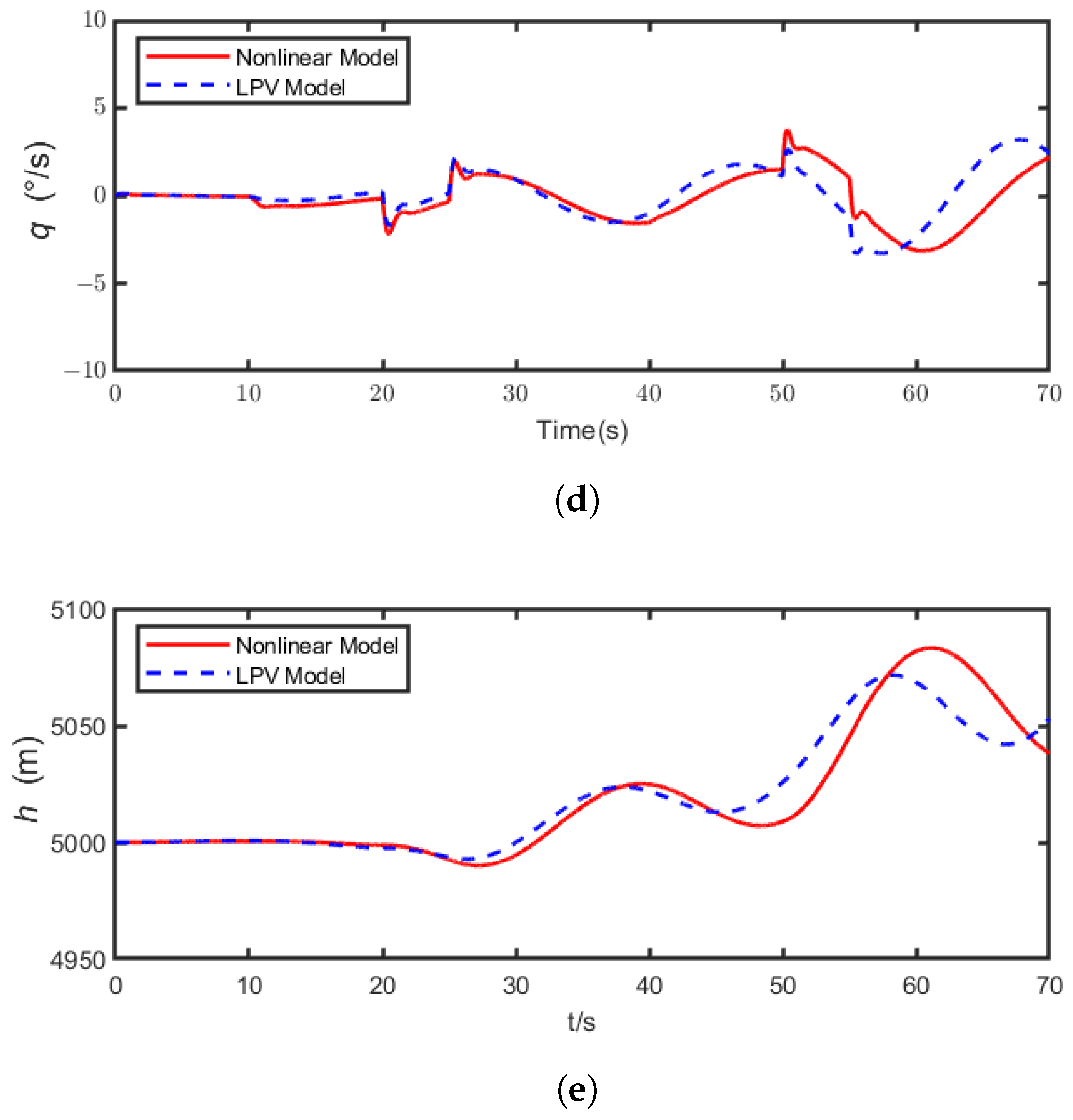
4.1. Mathematical Model Simulation
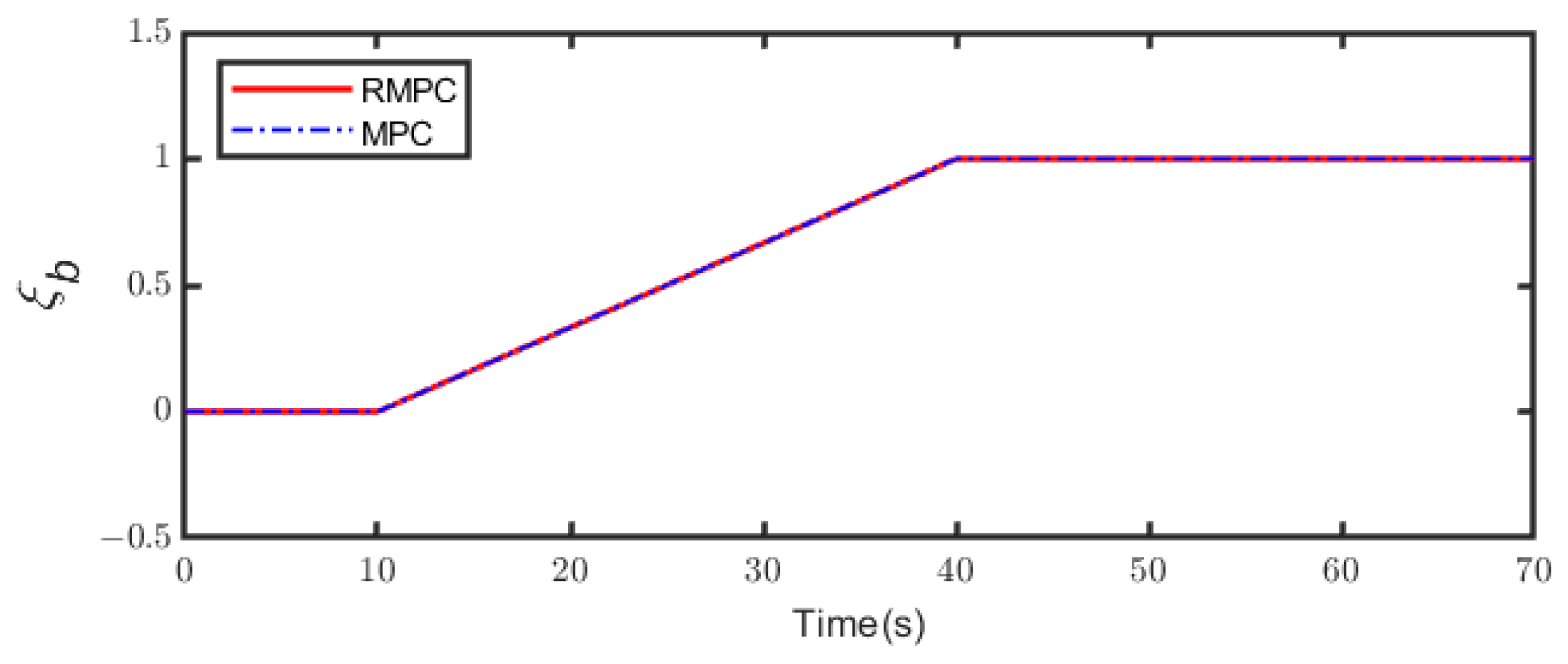
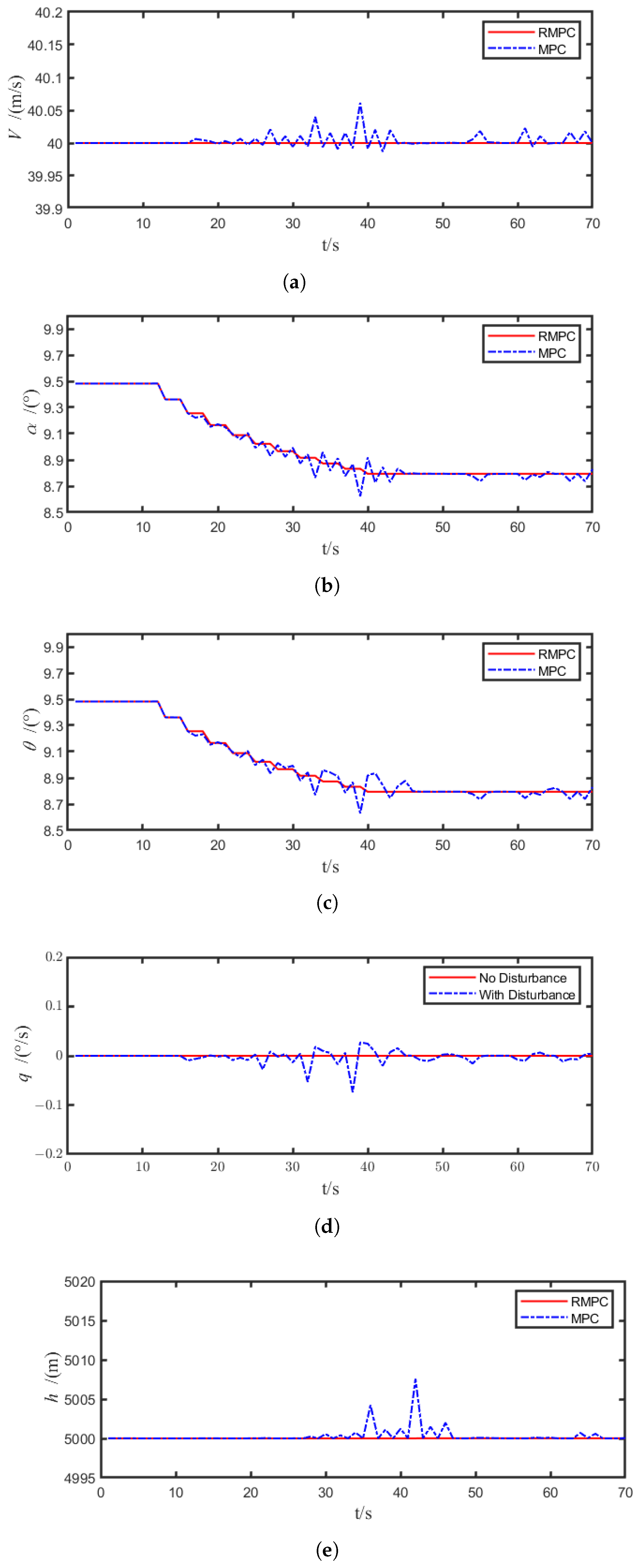
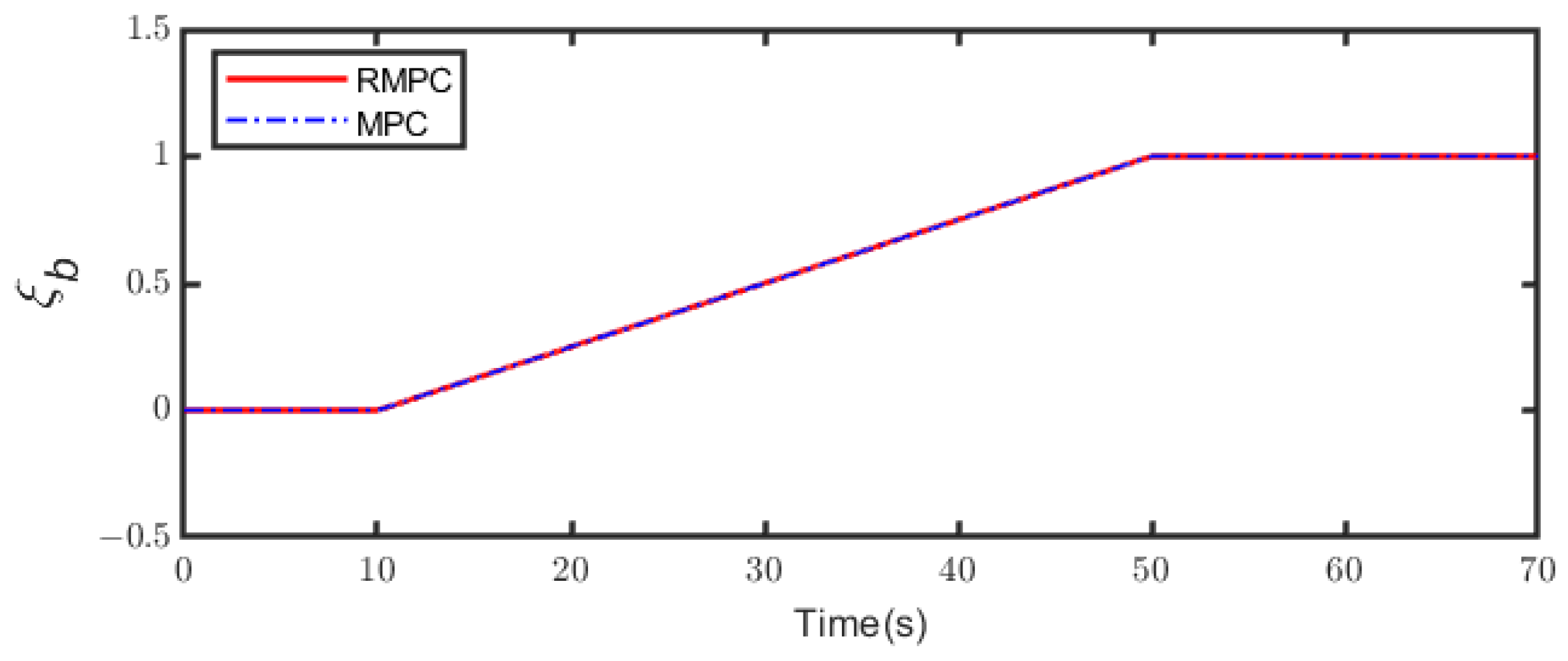
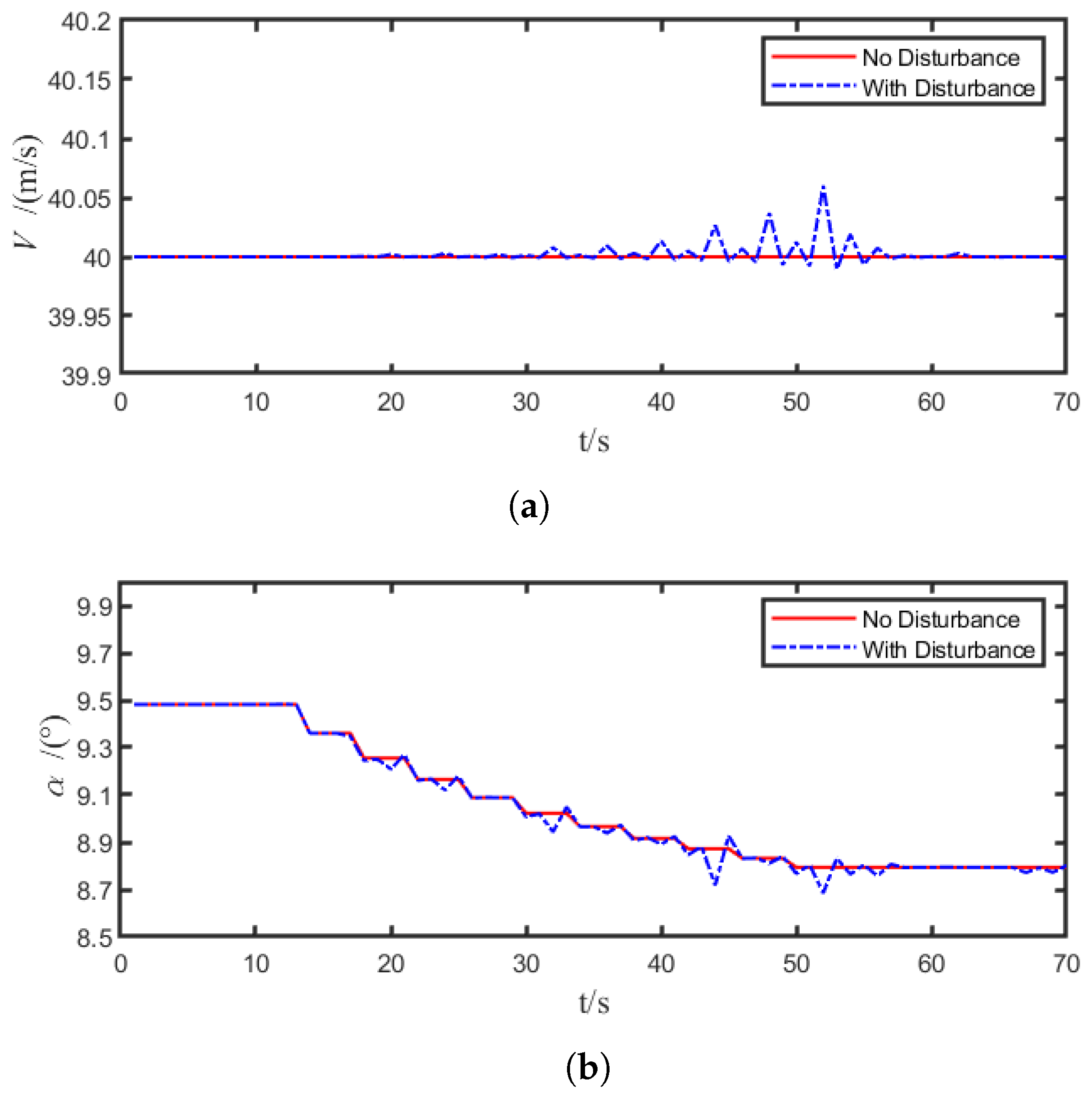
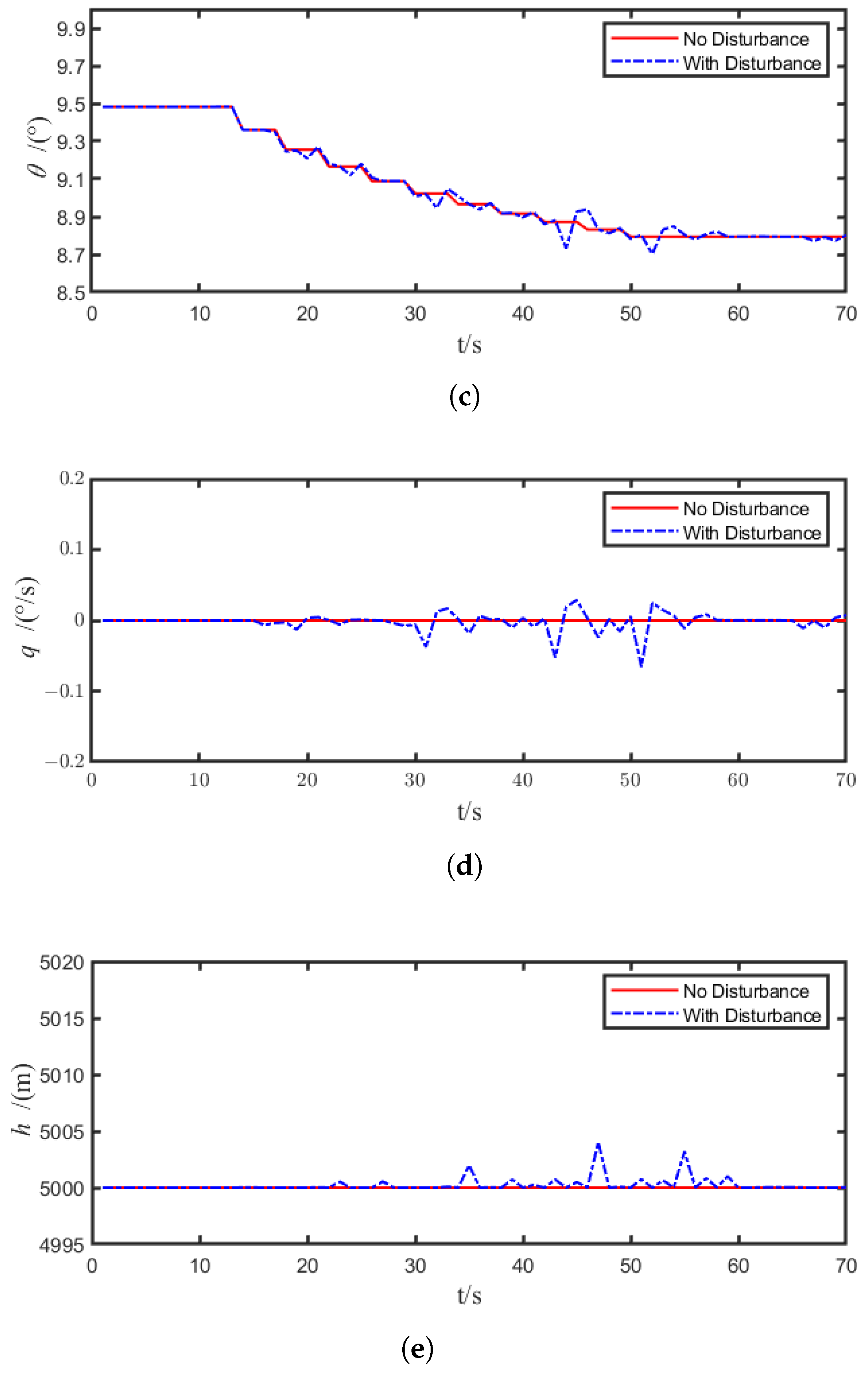
4.2. Controller Performance Verification
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Guo, T.; Zhu, C.; Feng, L.; Duan, Y.; Chen, H. Aerodynamic-driven morphing aircraft and its aerodynamic design. Chin. J. Aeronaut. 2024, 37, 103377. [Google Scholar] [CrossRef]
- Yang, T.; Zhang, X.; Wu, L.; Ai, J. Flight Dynamic Modeling and Control for a Telescopic Wing Morphing Aircraft via Asymmetric Wing Morphing. Aerosp. Sci. Technol. 2017, 70, 328–338. [Google Scholar] [CrossRef]
- Guo, T.; Zhu, C.; Feng, L.; Duan, Y.; Chen, H. Aerodynamic-driven morphing aircraft and its overall design. Chin. J. Aeronaut. 2024, 38, 103322. [Google Scholar] [CrossRef]
- Chu, L.; Li, Q.; Gu, F.; Du, X.; He, Y.; Du, Y. Design, Modeling, and Control of Morphing Aircraft: A Review. Chin. J. Aeronaut. 2022, 35, 220–246. [Google Scholar] [CrossRef]
- Pazooki, M.S.; Pazooki, J.S.; Moghadasi, R.; Ahmadi, M.; Amini, D.; Zekri, Y.; Friswell, M.I. A Review of Control Strategies Used for Morphing Aircraft Applications. Chin. J. Aeronaut. 2024, 37, 436–463. [Google Scholar] [CrossRef]
- Weisshaar, T.A. Morphing Aircraft Systems: Historical Perspectives and Future Challenges. J. Aircr. 2013, 50, 337–353. [Google Scholar] [CrossRef]
- Yuan, L.; Wang, L.; Xu, J. Adaptive Fault-Tolerant Controller for Morphing Aircraft Based on the L2 Gain and a Neural Network. Aerosp. Sci. Technol. 2023, 132, 107985. [Google Scholar] [CrossRef]
- Wang, S.; Chao, T.; Han, Y.; Du, H. Research Progress on Morphing Aircraft Morphing Strategies and Control Methods. Tactical Missile Technol. 2024, 4, 1–15. [Google Scholar] [CrossRef]
- Yin, M.; Lu, Y.; He, Z. LPV Modeling and Robust Gain-Scheduling Control of Morphing Aircraft. J. Nanjing Univ. Aeronaut. Astronaut. 2013, 45, 202–208. [Google Scholar] [CrossRef]
- Yang, Q.; Hu, L.; Zhang, Y.; Lü, X.; Li, X.; Cai, G. Attitude Control of Morphing Aircraft Based on Uncertain LPV System. J. Ordnance Equip. Eng. 2023, 44, 127–133. [Google Scholar]
- Wu, Q.; Liu, Z.; Ding, B.; Zhu, L. Design of Sliding Mode Controller with Self-adaption for a Morphing Aircraft. In Proceedings of the 2018 Chinese Automation Congress (CAC), Xi’an, China, 30 November–2 December 2018; pp. 122–127. [Google Scholar] [CrossRef]
- Athayde, A.; Moutinho, A.; Azinheira, J.R. Experimental Nonlinear and Incremental Control Stabilization of a Tail-Sitter UAV with Hardware-in-the-Loop Validation. Robotics 2024, 13, 51. [Google Scholar] [CrossRef]
- Yin, M. Research on Coordinated Control of Morphing and Flight for Morphing Aircraft. J. Aircr. Control 2016. [Google Scholar]
- Zhao, M.; Li, S. Switched Robust Predictive Control for Constrained Nonlinear Systems. Control Theory Appl. 2010, 27, 4–495. [Google Scholar]
- Zanon, M.N.; Mandić, D.R.; Domahidi, A.; Morari, M.; Jones, C.N. On Real-Time Robust Model Predictive Control. Automatica 2014, 50, 683–694. [Google Scholar] [CrossRef]
- Xu, W.; Li, Y.; Pei, B.; Yu, Z. Coordinated Optimization Control of Morphing Aircraft Based on Multi-Model MPC. Syst. Eng. Electron. 2023, 45, 2902–2911. [Google Scholar]
- Shao, P.; Dong, Y.; Li, J.; Qu, G. Model Predictive Control Method for a Foldable-Wing Biomimetic Morphing UAV Based on an LPV System. J. Xi’an Aeronaut. Univ. 2020, 38, 3–10. [Google Scholar]
- Koehler, J.; Soloperto, R.; Müller, M.A.; Allgöwer, F. A Computationally Efficient Robust Model Predictive Control Framework for Uncertain Nonlinear Systems. IEEE Trans. Autom. Control 2021, 66, 794–801. [Google Scholar] [CrossRef]
- Lin, X.; Görges, D. Robust Model Predictive Control of Linear Systems with Predictable Disturbance with Application to Multiobjective Adaptive Cruise Control. IEEE Trans. Control Syst. Technol. 2019, 28, 1460–1475. [Google Scholar] [CrossRef]
- Wang, E.; Lu, H.; Zhang, J.; Wang, C.; Qiao, J. A Novel Adaptive Coordinated Tracking Control Scheme for a Morphing Aircraft with Telescopic Wings. Chin. J. Aeronaut. 2024, 37, 148–162. [Google Scholar] [CrossRef]
- Chen, S.; Jia, M.; Liu, Y.; Gao, Z.; Xiang, X. Deformation modes and key technologies of aerodynamic layout design for morphing aircraft: Review. Acta Aeronaut. Astronaut. Sin. 2024, 45, 629595. [Google Scholar] [CrossRef]
- Xu, W.; Li, Y.; Pei, B.; Yu, Z. Coordinated Intelligent Control of the Flight Control System and Shape Change of Variable Sweep Morphing Aircraft Based on Dueling-DQN. Aerosp. Sci. Technol. 2022, 130, 107898. [Google Scholar] [CrossRef]
- Cai, G.; Yang, Q.; Mu, C.; Li, X. Design of Linear Parameter-Varying Controller for Morphing Aircraft Using Inexact Scheduling Parameters. IET Control Theory Appl. 2023, 17, 493–503. [Google Scholar] [CrossRef]
- González Cisneros, P.S.; Werner, H. Nonlinear Model Predictive Control for Models in Quasi-Linear Parameter Varying Form. Int. J. Robust Nonlinear Control 2020, 30, 3945–3959. [Google Scholar] [CrossRef]
- Ge, J.; Guo, J.; Wang, H.; Zhang, B.; Wan, Y.; Tang, S. Hypersonic Morphing Aircraft Adaptive Model Predictive Control. J. Beijing Univ. Aeronaut. Astronaut. 2024, 1–19. [Google Scholar] [CrossRef]
- Minniti, M.V.; Grandia, R.; Farshidian, F.; Hutter, M. Adaptive CLF-MPC with Application to Quadrupedal Robots. IEEE Robot. Autom. Lett. 2022, 7, 565–572. [Google Scholar] [CrossRef]
- Shao, P.; Dong, Y.; Ma, S. Model Predictive Control Based on Linear Parameter-Varying Model for a Bio-Inspired Morphing Wing UAV. In Proceedings of the 2021 International Conference on Robotics and Control Engineering, Beijing, China, 16–18 April 2021; pp. 59–63. [Google Scholar] [CrossRef]
- Limon, D.; Bravo, J.M.; Alamo, T.; Camacho, E.F. Robust MPC of Constrained Nonlinear Systems Based on Interval Arithmetic. IEE Proc.-Control Theory Appl. 2005, 152, 325–332. [Google Scholar] [CrossRef]
- Santos, T.L.M.; Cunha, V.M. Robust MPC for Linear Systems with Bounded Disturbances Based on Admissible Equilibria Sets. Int. J. Robust Nonlinear Control 2021, 31, 2690–2711. [Google Scholar] [CrossRef]
- Liu, Z.; Ozay, N. On the Convergence of the Backward Reachable Sets of Robust Controlled Invariant Sets for Discrete-Time Linear Systems. In Proceedings of the 2022 IEEE 61st Conference on Decision and Control (CDC), Cancun, Mexico, 6–9 December 2022; pp. 4270–4275. [Google Scholar] [CrossRef]





Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ren, W.; Wei, Y.; Wang, C. Design of a Morphing Aircraft Based on Model Predictive Control. Appl. Sci. 2025, 15, 4380. https://doi.org/10.3390/app15084380
Ren W, Wei Y, Wang C. Design of a Morphing Aircraft Based on Model Predictive Control. Applied Sciences. 2025; 15(8):4380. https://doi.org/10.3390/app15084380
Chicago/Turabian StyleRen, Wei, Yingjie Wei, and Cong Wang. 2025. "Design of a Morphing Aircraft Based on Model Predictive Control" Applied Sciences 15, no. 8: 4380. https://doi.org/10.3390/app15084380
APA StyleRen, W., Wei, Y., & Wang, C. (2025). Design of a Morphing Aircraft Based on Model Predictive Control. Applied Sciences, 15(8), 4380. https://doi.org/10.3390/app15084380