
Mechanical Modeling and Dynamic Characteristics of a Three-Directional Vibration Absorber

 ,
, 
Abstract
1. Introduction
2. Materials and Methods
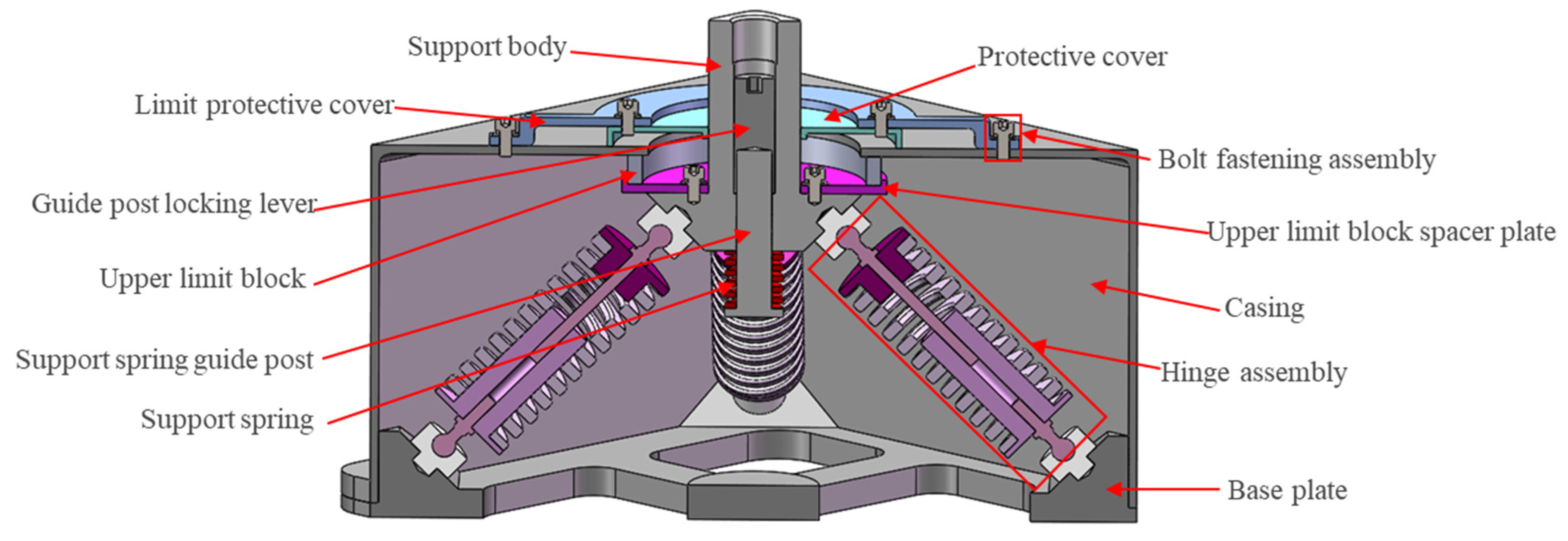
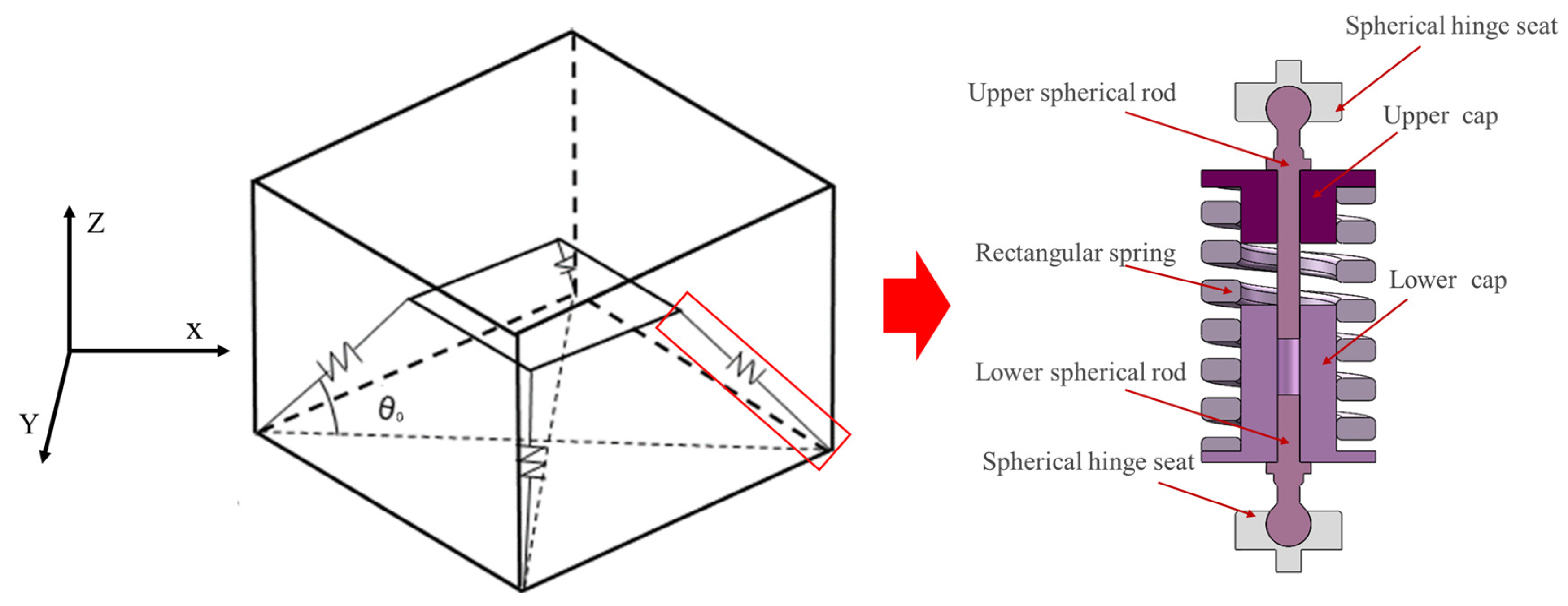
2.1. Material and Structural Composition
2.2. Analytical Modeling Strategy
2.3. Dynamic Methodology
2.4. Experimental Validation
- (1)
- Static loading tests, to measure force–displacement behavior and compare with model predictions;
- (2)
- Dynamic harmonic excitation tests, to evaluate amplitude–frequency response and transmissibility under small- and mid-range excitation amplitudes.
2.5. Justification and Future Extensions
3. Results and Discussion
3.1. Structural Design of the Three-Directional Vibration Isolator
3.2. Static Modeling and Analysis of the Three-Directional Vibration Isolator
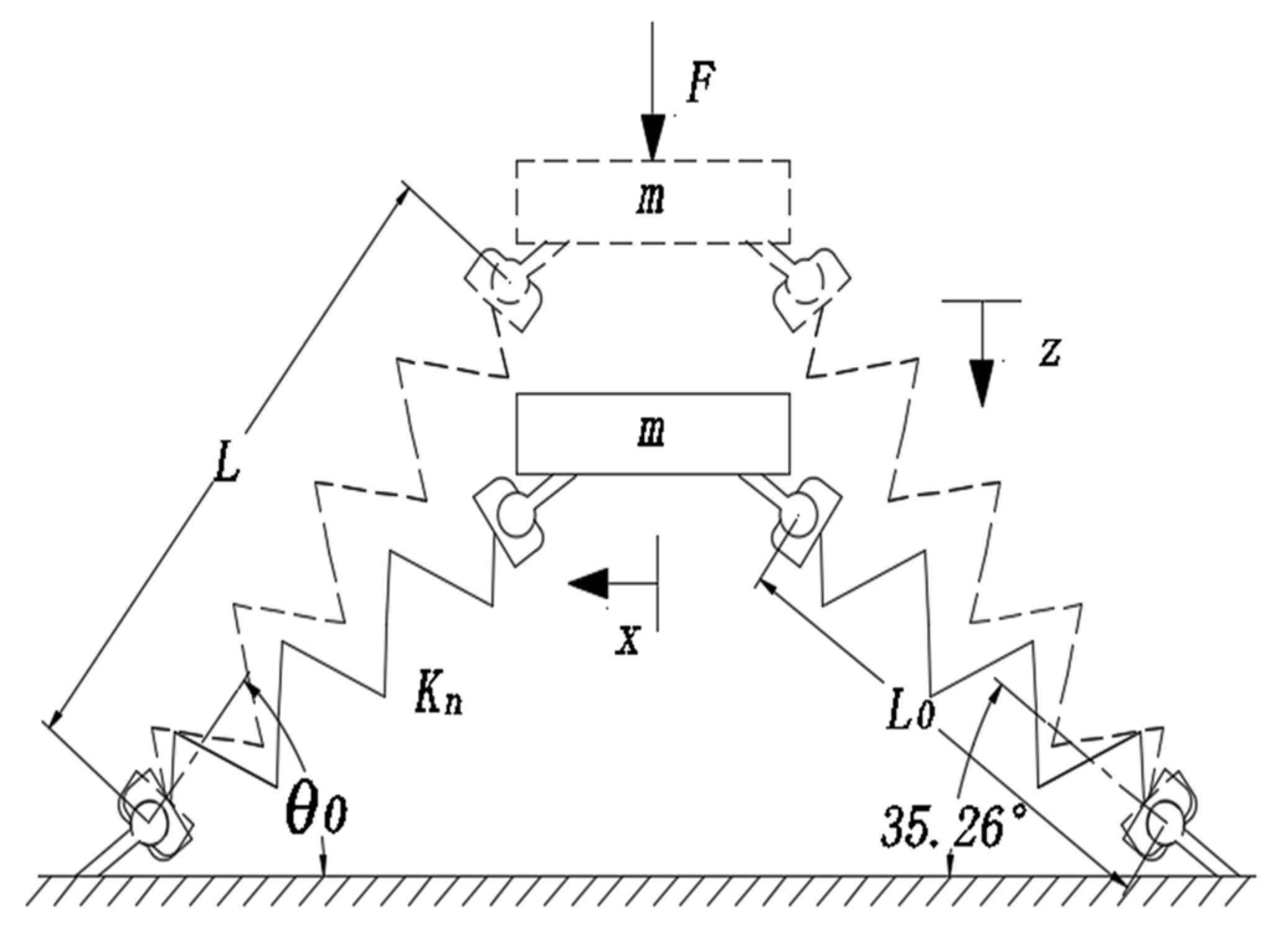
3.2.1. Vertical Static Equilibrium and Restoring Force Analysis
3.2.2. Lateral Static Equilibrium and Stiffness Modeling
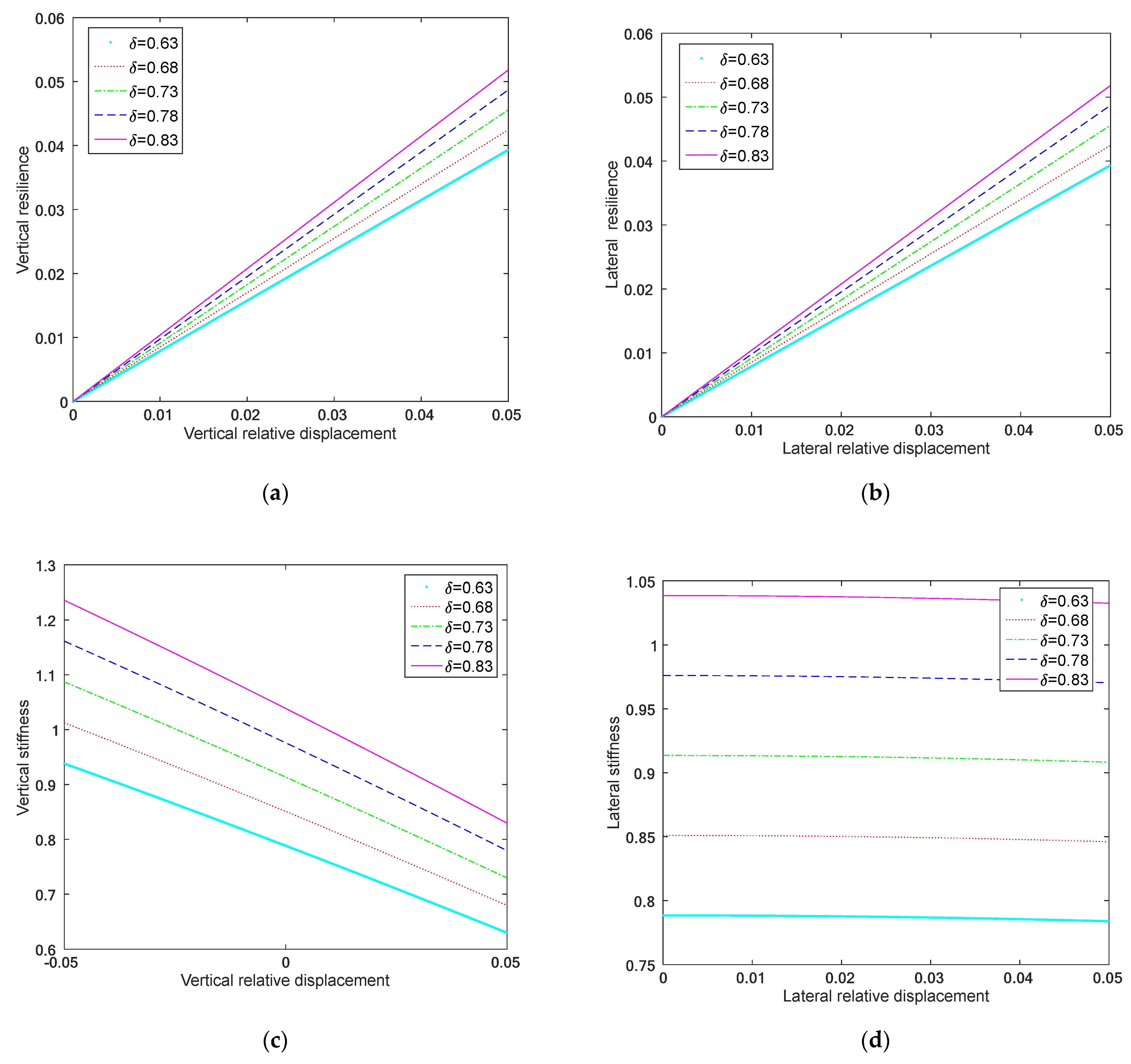
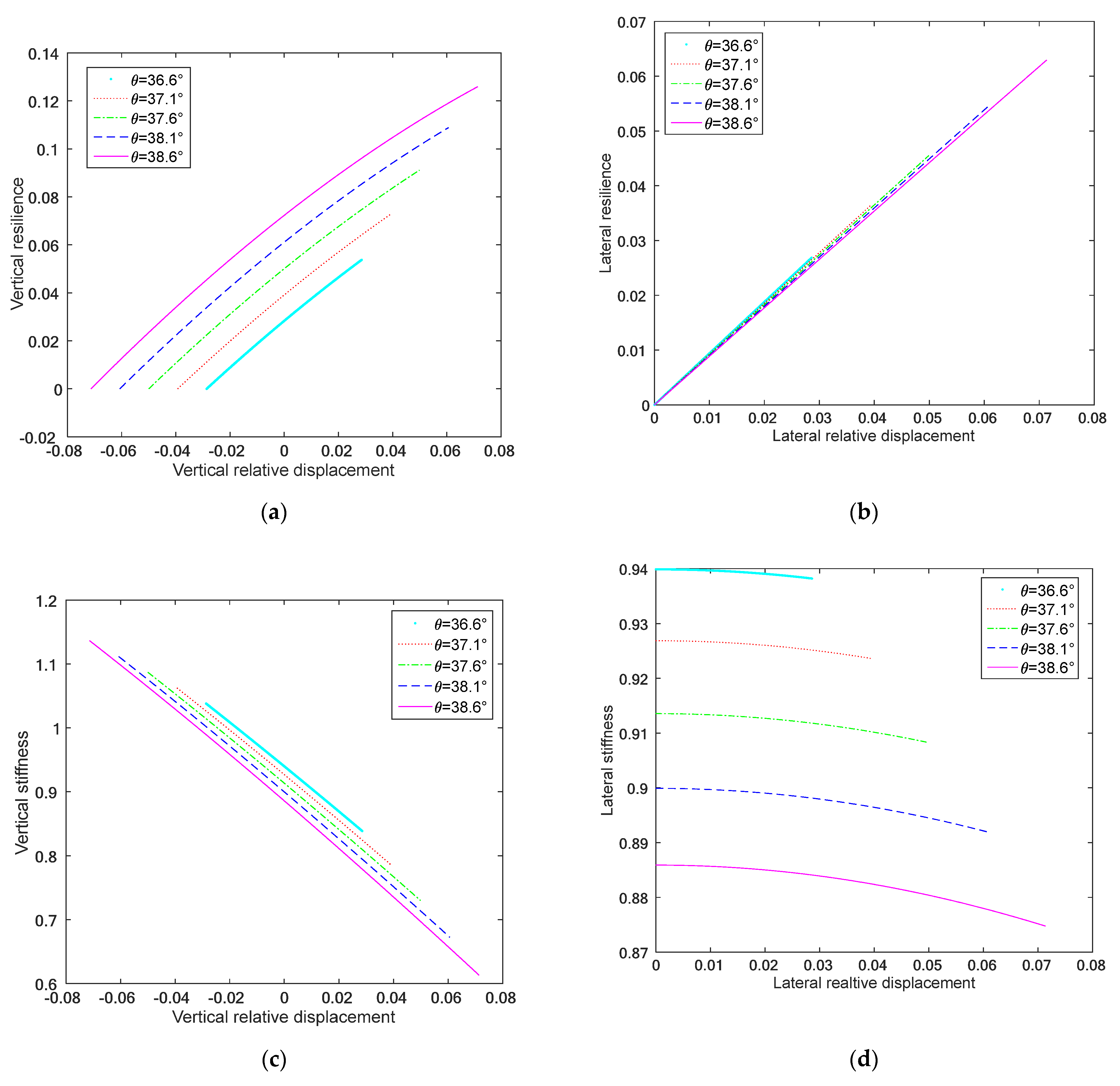
3.2.3. Comprehensive Analysis of Three-Directional Static Characteristics
- (1)
- Influence of the stiffness ratio on load distribution
- (2)
- Impact of initial inclination angle on deformation and load capacity
3.3. Dynamic Response Analysis of the Three-Directional Vibration Isolator
3.3.1. Dynamic Modeling and Governing Equations
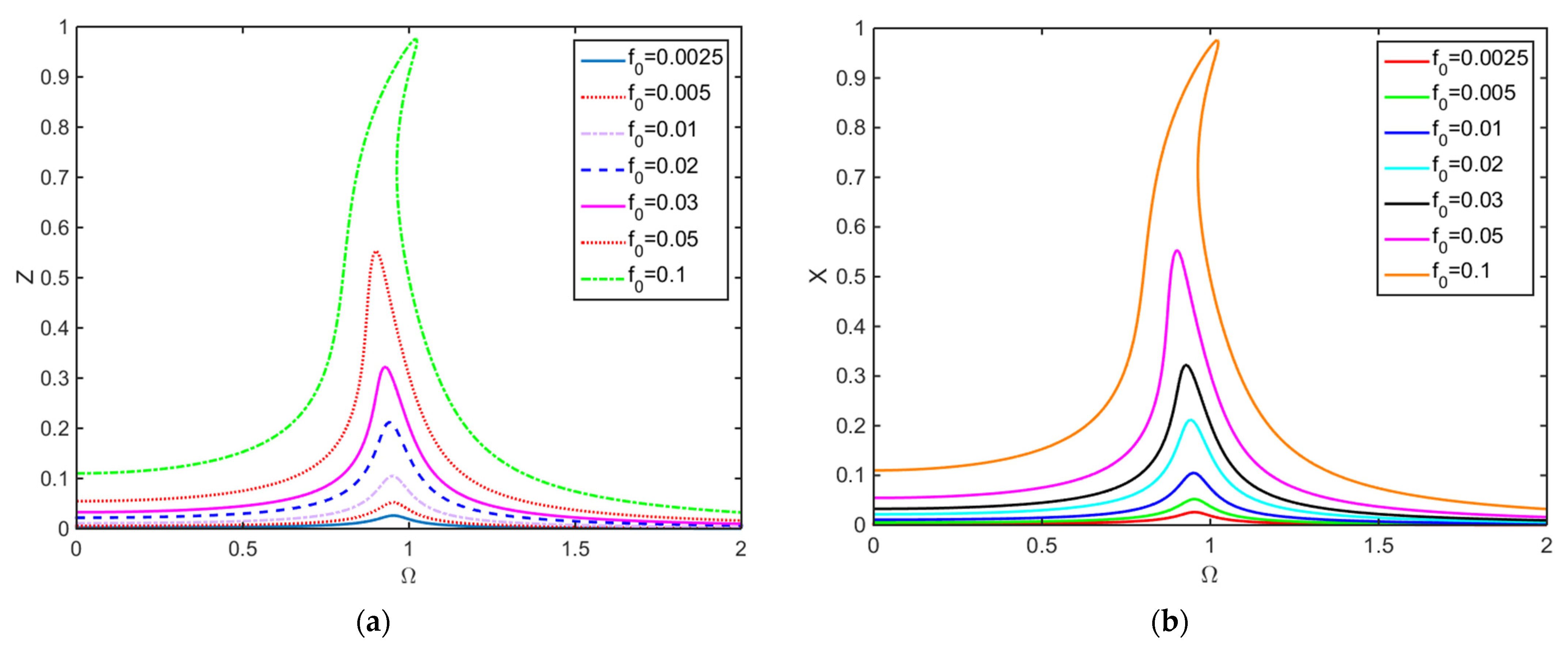
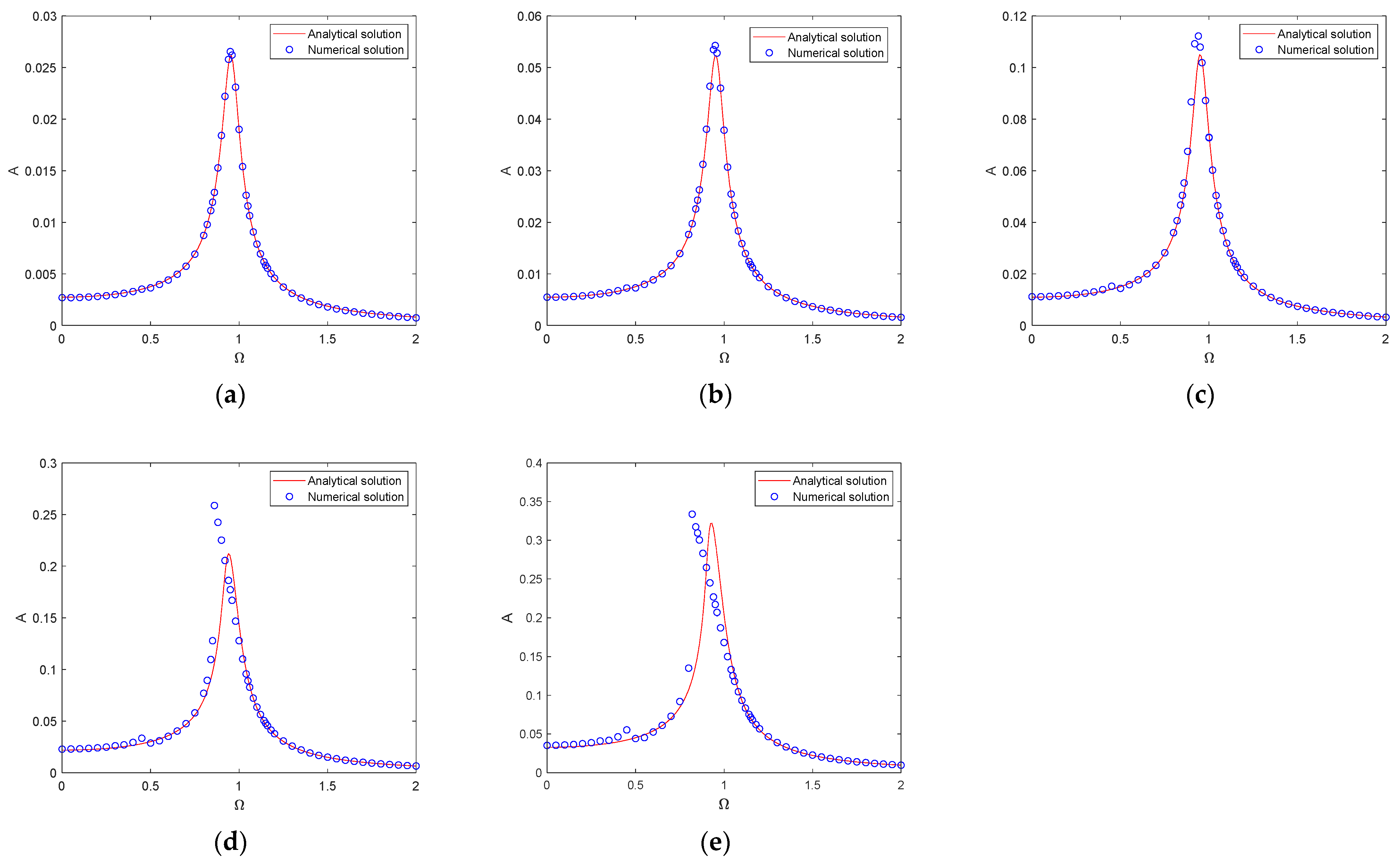
3.3.2. Nonlinear Amplitude–Frequency Response and Resonance Behavior
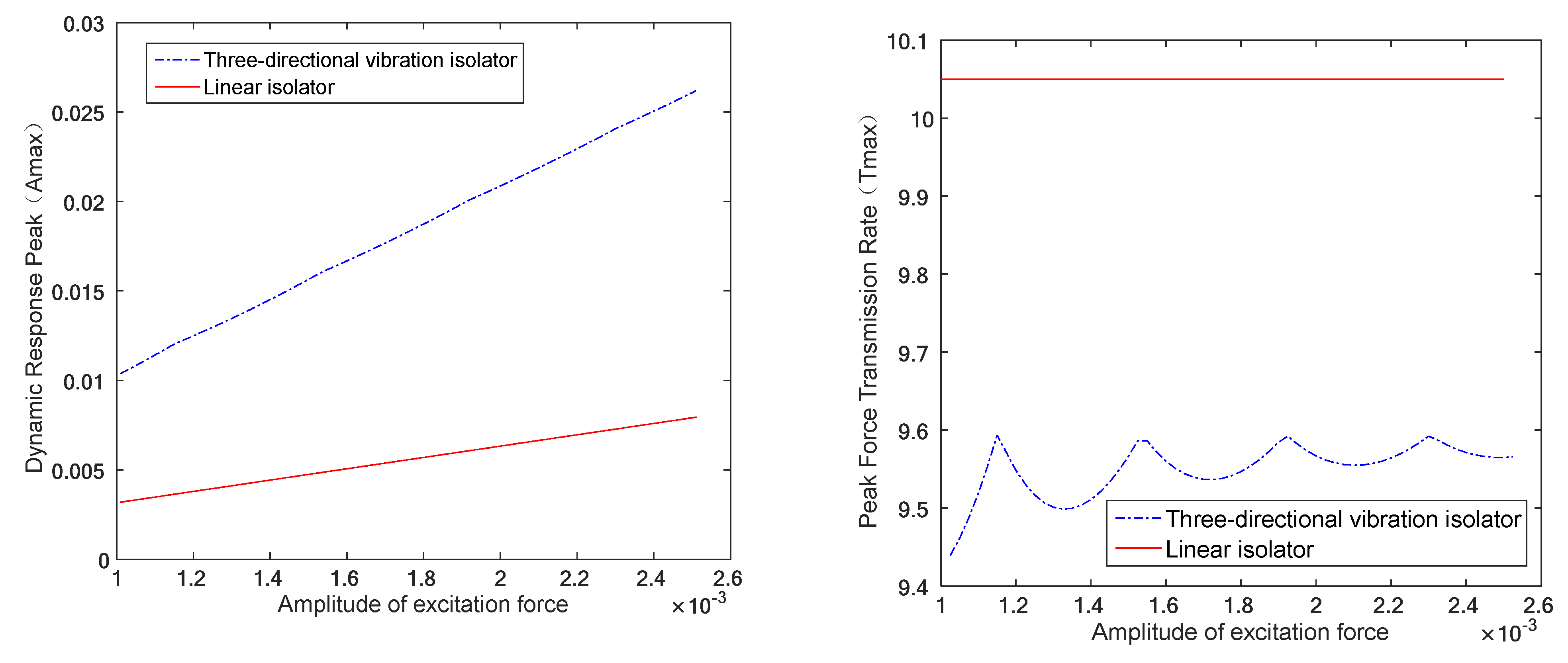
3.3.3. Vibration Isolation Performance and Transmissibility Analysis
3.4. Influence of Nonlinear Damping on Dynamic Performance
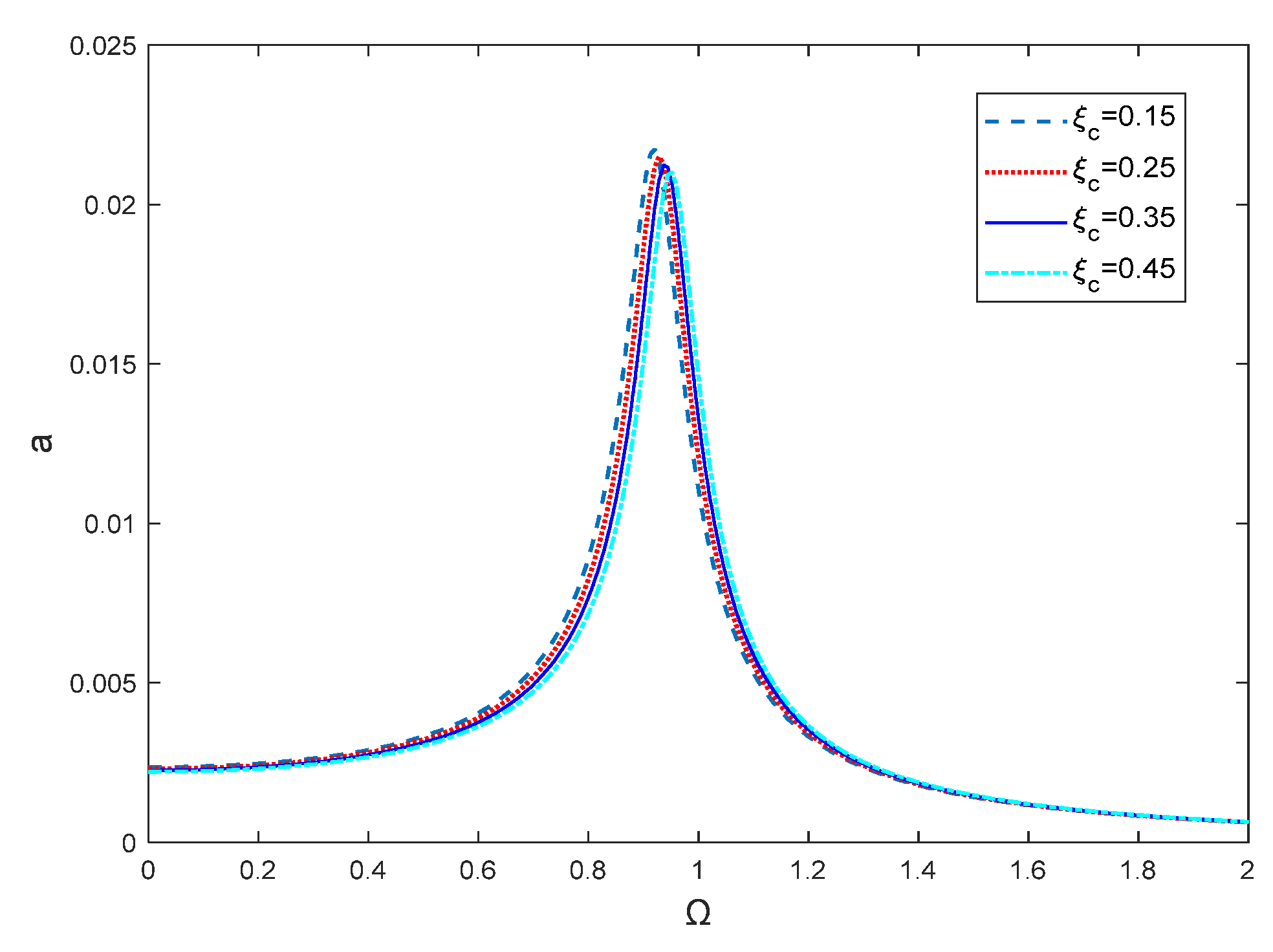
3.4.1. Effect of Nonlinear Damping on Dynamic Response Behavior
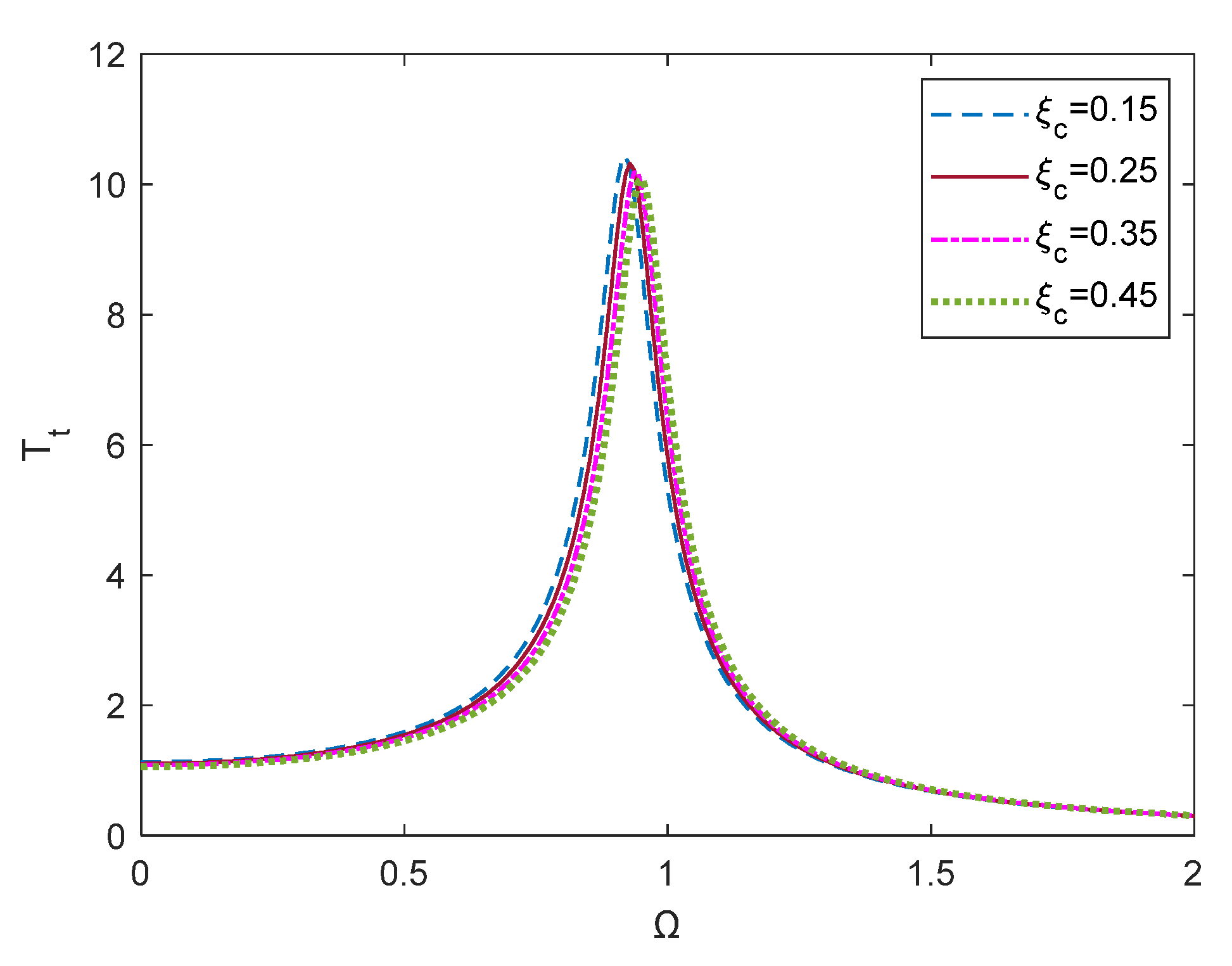
3.4.2. Influence of Nonlinear Damping on Vibration Isolation Efficiency
3.5. Experimental Validation
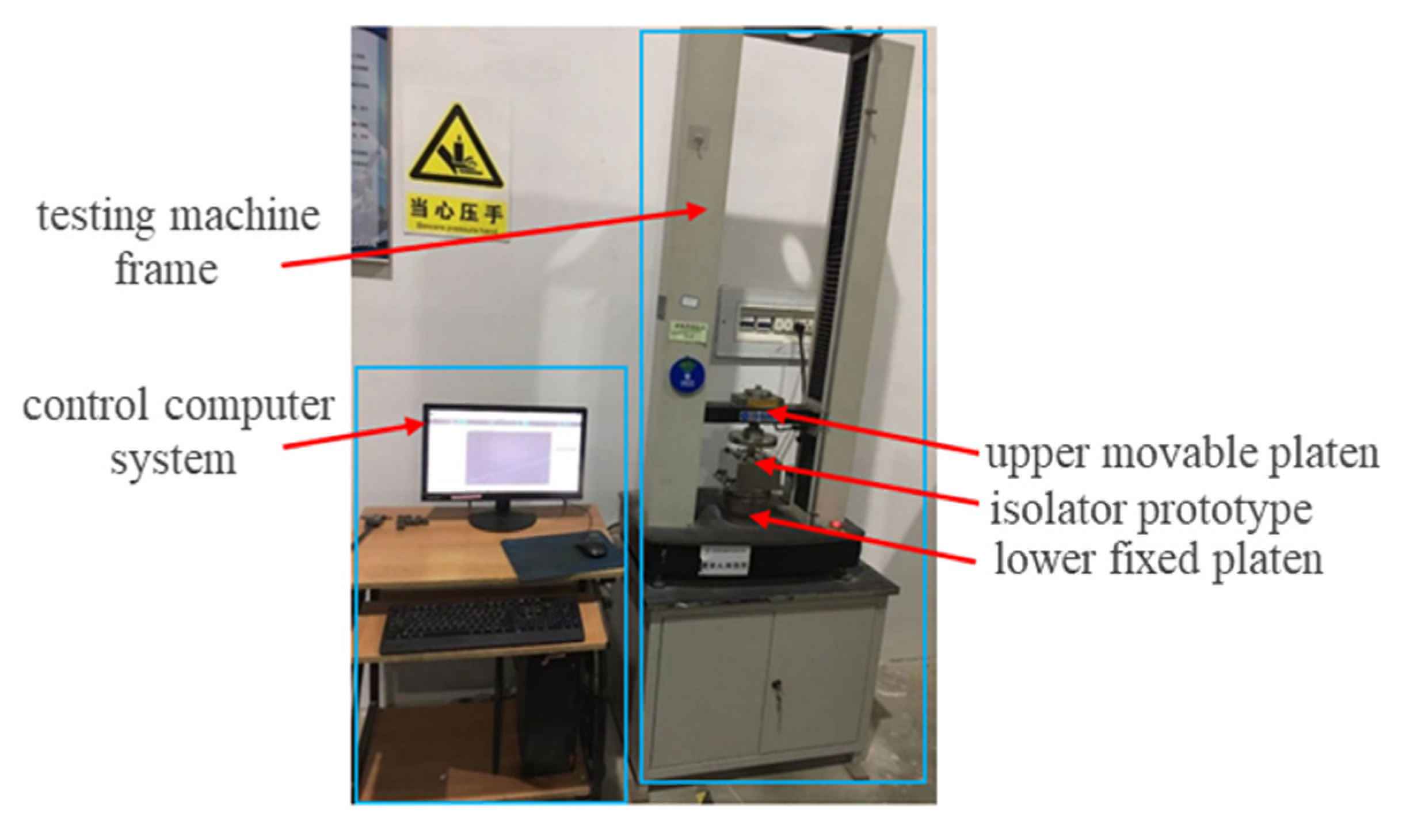
3.5.1. Static Experimental Validation
- (1)
- The isolator was secured to the lower platen. After initializing the test software, the upper platen was manually lowered at reduced speed (0.6 mm/min) until contact with the isolator was established, at which point displacement readings were zeroed.
- (2)
- Based on specific test requirements, displacement-controlled loading was performed at a constant rate of 0.6 mm/min with a maximum displacement of 8 mm to ensure measurement accuracy.
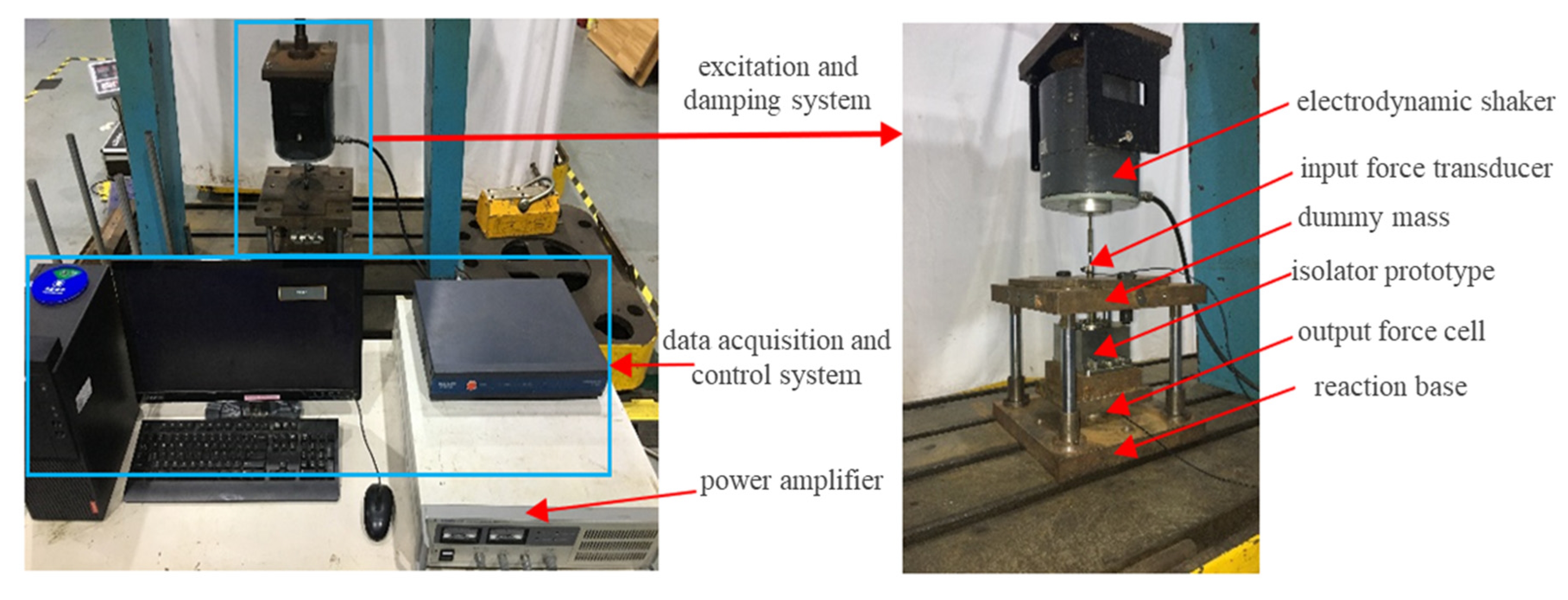
3.5.2. Harmonic Excitation Test Study
4. Conclusions
- Structural design and stiffness characteristics: The inclination angle of the spring assemblies at static equilibrium is 35.26°, ensuring three-directional isolation. The system exhibits weak nonlinear stiffness characteristics, where vertical stiffness increases and lateral stiffness decreases as displacement grows. The stroke of the isolator is determined by the initial inclination angle of the spring assemblies, while the load-bearing capacity is influenced by both spring stiffness and the initial inclination angle.
- Approximate dynamic modeling and validation: The nonlinear restoring forces in vertical and horizontal directions were approximated using Taylor series expansions, and the harmonic balance method was used to obtain an analytical amplitude–frequency response. Comparisons with numerical solutions via the fourth-order Runge–Kutta method and experimental results confirmed the validity of the approximation under small excitation amplitudes.
- Influence of Excitation Force Amplitude on Isolation Performance: As the excitation force amplitude increases, the peak dynamic displacement of the isolator increases, while the force transmissibility fluctuates but generally follows an increasing trend. Compared to a linear isolator, the three-directional isolator exhibits a larger peak dynamic displacement but a lower force transmissibility, indicating enhanced vibration isolation capability. Both the peak dynamic displacement and force transmissibility increase with the initial inclination angle of the spring assemblies.
- Impact of Nonlinear Damping due to Coulomb friction: The incorporation of Coulomb friction damping captures the nonlinear dissipation behavior within the hinge pairs. Under small-amplitude harmonic excitation, an increase in the equivalent Coulomb friction factor leads to a decrease in response amplitude and force transmissibility before resonance, but an increase beyond the resonance frequency. Additionally, an increase in Coulomb friction factor shifts the dynamic response and force transmissibility curves downward and to the right, raising the system’s resonance frequency and reducing the effective isolation range. These results highlight the dual effect of nonlinear damping, where optimizing damping strength is critical for achieving effective isolation performance.
- Experimental verification of static and dynamic models: Quasi-static and harmonic excitation tests were conducted on a prototype isolator. The static model accurately captured the loading–unloading force–displacement characteristics, while the dynamic model effectively reproduced the frequency response curves. Hysteresis loops due to Coulomb friction were clearly observed, validating the nonlinear damping assumptions.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Zhao, M.M.; Duan, Y.X. Development of a three-directional equal-stiffness rubber vibration absorber. China Rubber Ind. 2021, 68, 114–118. [Google Scholar]
- Zou, L.M.; Zheng, C.; Ren, Z.L. Mechanical Properties and Environmental Effects of a Metal Rubber Damping Three-Directional Vibration Absorber. Mech. Sci. Technol. 2024, 43, 1323–1332. [Google Scholar]
- Zhang, S.S.; Shang, C.; Dai, J. Study on three-directional vibration transmission characteristics of a floating raft isolation system. Ship Sci. Technol. 2019, 41, 77–80. [Google Scholar]
- Xie, X.L.; Diao, J.C.; Xu, Y.L.; Zhang, Z.H.; Zhang, Z.Y. Dynamic modeling and experimental research of three-directional vibration isolation platform. In Proceedings of the 12th National Conference on Vibration Theory and Application, Nanning, China, 20–23 October 2017. [Google Scholar]
- Chen, S.; Wan, Z.; Zhu, X.; Li, T.; Zhang, W. Dynamic modeling and software development for floating raft isolation systems. Noise Vib. Control 2023, 43, 14. [Google Scholar]
- Niu, H.X.; Yan, B.; Wu, X. Design and research of new vibration isolator for double-layer vibration isolation system of power unit. Mech. Manuf. Autom. 2019, 48, 110–114+130. [Google Scholar]
- Dong, W.Y. A comprehensive review of vibration isolation systems for airborne electro-optical pods. Equip. Environ. Eng. 2021, 18, 20–26. [Google Scholar]
- Khan, M.; Kumar. Dynamic characteristics of a three-dimensional vibration isolator. Int. J. Mech. Sci. 2019, 159, 132–142. [Google Scholar]
- Liang, Q.; Luo, W.; Zhou, Y.; Lu, Z.; Li, J.; He, Z. Vibration filtering effect of a novel three-dimensional isolation bearing on metro vibration isolation. Eng. Struct. 2024, 301, 117304. [Google Scholar] [CrossRef]
- Yuan, Y.; Feng, L. Nonlinear dynamics of a three-degree-of-freedom vibration isolation system. Nonlinear Dyn. 2021, 104, 251–267. [Google Scholar]
- Zhu, X.Y.; Gao, L.; Pan, R.; Li, J.B. Design and analysis of isolation effectiveness for three-dimensional base-seismic isolation of nuclear island building. Nucl. Eng. Technol. 2022, 54, 374–385. [Google Scholar] [CrossRef]
- Tai, Y.J.; Huang, Z.W.; Chen, C.; Hua, X.G.; Chen, Z.Q. Geometrically nonlinearity analysis and performance evaluation of tuned inerter dampers for multidirectional seismic isolation. Mech. Syst. Signal Process. 2022, 168, 108681. [Google Scholar] [CrossRef]
- Demir, M.U.; Yilmaz, C. Analysis and design of an adjustable stiffness three-axis horizontal vibration isolator using elastic columns and a string in tension. J. Sound Vib. 2022, 523, 116736. [Google Scholar] [CrossRef]
- Han, Q.H.; Jing, M.; Lu, Y.; Liu, M.J. Mechanical behaviors of air spring-FPS three-dimensional isolation bearing and isolation performance analysis. Soil Dyn. Earthq. Eng. 2021, 149, 106872. [Google Scholar] [CrossRef]
- Sukumar, N.; Murthy, S. Three-axis vibration isolation system for sensitive instruments. J. Vib. Control 2018, 24, 3487–3502. [Google Scholar]
- Sheng, T.; Liu, G.B.; Bian, X.C.; Shi, W.X.; Chen, Y. Development of a three-directional vibration isolator for buildings subject to metroand earthquake-induced vibrations. Eng. Struct. 2022, 252, 113576. [Google Scholar] [CrossRef]
- Sun, Y.; Li, J.W.; Jiang, X.Y.; Huang, J.; Zeng, X.K.; Jian, R.R.; Hu, X.F. Three-directional stiffness of wedge rubber absorber based on orthogonal test. Rubber Ind. 2022, 69, 268–273. [Google Scholar]
- Liu, X.; Zhao, Q.; Zhang, Z.; Zhou, X. An experiment investigation on the effect of Coulomb friction on the displacement transmissibility of a quasi-zero stiffness isolator. J. Mech. Sci. Technol. 2019, 33, 121–127. [Google Scholar] [CrossRef]
- Ren, Z.Y.; Zhou, C.H.; Bai, H.B. Design and performance study of metal rubber dampers under random vibration excitation. In Proceedings of the 15th National Conference on Vibration Theory and Applications, Chengdu, China, 12 October 2023. [Google Scholar]
- Friis, T.; Tarpø, M.; Katsanos, E.I.; Brincker, R. Equivalent linear systems of nonlinear systems. J. Sound Vib. 2020, 469, 115126. [Google Scholar] [CrossRef]
- Lu, X.L.; Xing, H.J.; Ruan, Z.Y. Vibration absorption characteristics of dynamic vibration absorber with piecewise damping characteristics. J. Vib. Eng. 2024, 37, 945–953. [Google Scholar]
- Wu, W.; Tang, B. An approximate method for solving force and displacement transmissibility of a geometrically nonlinear isolation system. Int. J. Non-Linear Mech. 2020, 125, 103512. [Google Scholar] [CrossRef]
- Shao, M.Y.; Qing, J.J.; Wang, J.; Wu, J.; Xue, Z. Nonlinear vibration of an orthotropic moving membrane. J. Low Freq. Noise Vib. Act. Control 2022, 41, 1275–1285. [Google Scholar] [CrossRef]
- Shuster, S.; Geller, D.; Smith, T. A performance analysis of on-board numerical propagators. In Proceedings of the 41st Annual American-Astronautical-Society Rocky Mountain Section Guidance, Navigation and Control Conference, Breckenridge, CO, USA, 1–7 February 2018. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Three-Directional Vibration Isolator Type | Advantages | Comparative Limitations (vs. Metal Spring) | Typical Applications |
|---|---|---|---|
| Metal Spring Three-Directional Isolator | High load bearing capacity | N/A (Reference standard) | Heavy machinery |
| Effective low frequency isolation | Power generation systems | ||
| Predictable linear stiffness | Rail transport | ||
| Air Spring Three-Directional Isolator | Adjustable stiffness | Higher maintenance costs | Precision instrumentation |
| Ultra-low frequency isolation | Limited environmental adaptability | Optical tables | |
| Excellent high frequency attenuation | System complexity | Luxury vehicle suspensions | |
| Metal Rubber Isolator | Extreme environment tolerance | Higher unit cost | Spacecraft |
| Good dry damping | Complex design calculations | Military equipment | |
| No aging effects | Difficult manufacturing process | Special environment applications | |
| Rubber-Metal Composite Three-Directional Isolator | Combines elasticity and damping | Short service life | Automotive suspensions |
| Easy installation | Unsuitable for extreme environments | Building isolation | |
| Suitable for small equipment | Lower load capacity | Energy Equipment |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, Z.; Chen, M.; Li, Q.; Li, C.; Qiu, Y.; Ye, Z.; Xue, G. Mechanical Modeling and Dynamic Characteristics of a Three-Directional Vibration Absorber. Appl. Sci. 2025, 15, 4420. https://doi.org/10.3390/app15084420
Wu Z, Chen M, Li Q, Li C, Qiu Y, Ye Z, Xue G. Mechanical Modeling and Dynamic Characteristics of a Three-Directional Vibration Absorber. Applied Sciences. 2025; 15(8):4420. https://doi.org/10.3390/app15084420
Chicago/Turabian StyleWu, Zhangbin, Mao Chen, Qiuyu Li, Canhui Li, Yunzhe Qiu, Zi Ye, and Guangming Xue. 2025. "Mechanical Modeling and Dynamic Characteristics of a Three-Directional Vibration Absorber" Applied Sciences 15, no. 8: 4420. https://doi.org/10.3390/app15084420
APA StyleWu, Z., Chen, M., Li, Q., Li, C., Qiu, Y., Ye, Z., & Xue, G. (2025). Mechanical Modeling and Dynamic Characteristics of a Three-Directional Vibration Absorber. Applied Sciences, 15(8), 4420. https://doi.org/10.3390/app15084420