

Systematic Review of Mecanum and Omni Wheel Technologies for Motor Impairments

Abstract
1. Introduction
- (1)
- It identifies and categorizes the main mechanical, control-related, and usability challenges associated with Mecanum and omni wheel-based assistive mobility systems;
- (2)
- It highlights recent trends in design and interaction technologies, including AI-driven navigation, multimodal user input, and adaptive mechanical configurations;
- (3)
- It provides strategic recommendations for future research aimed at improving terrain adaptability, user accessibility, and system affordability.
2. Materials and Methods
2.1. Eligibility Criteria
2.2. Information Sources and Search Strategy
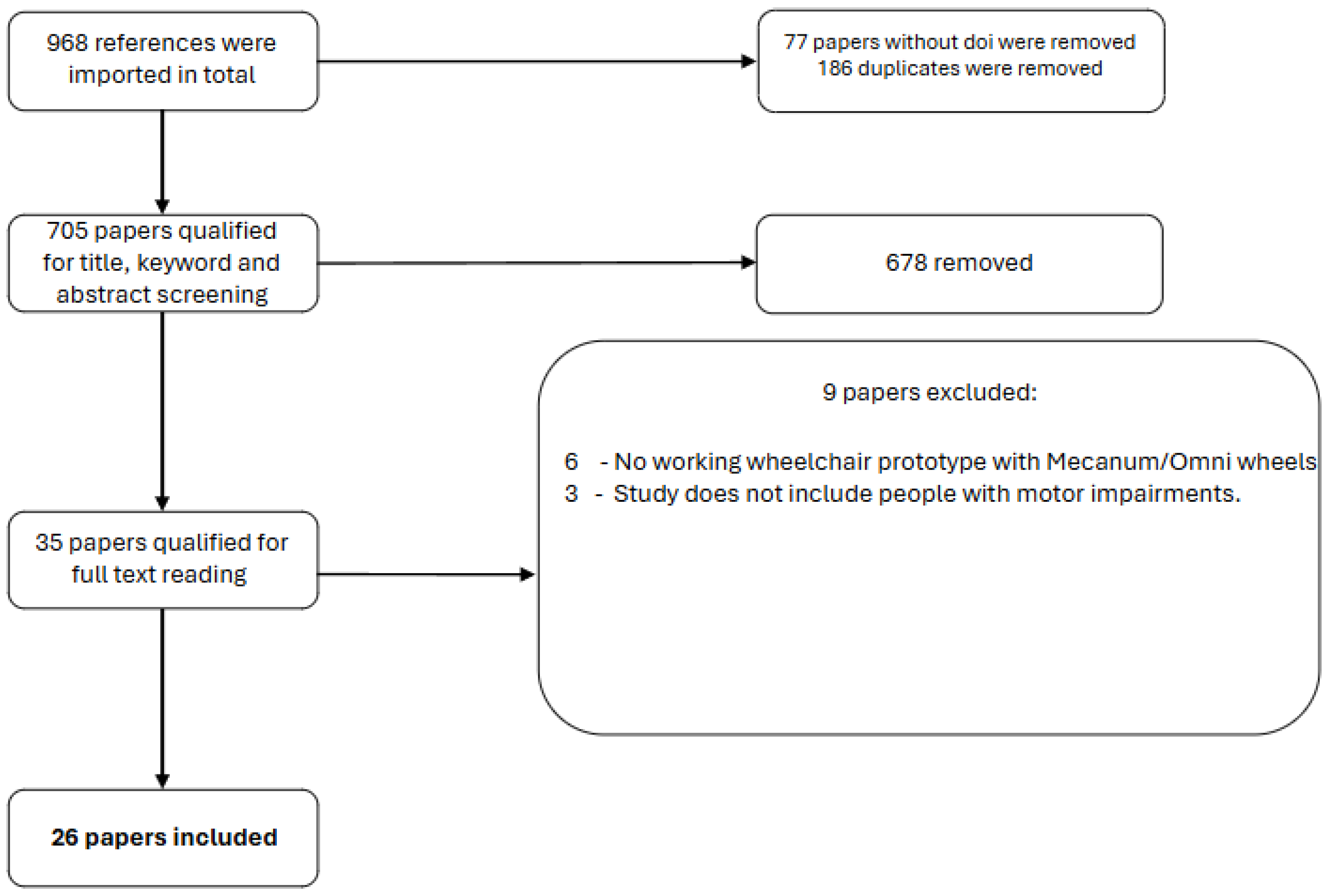
2.3. Selection Process
2.4. Data Collection and Items
2.5. Risk of Bias and Study Quality Considerations
2.6. Synthesis Methods
2.7. Reporting
3. Results
3.1. Stability and Terrain Adaptation
3.2. Control Systems and User Interfaces
3.3. Energy Efficiency and Drive Systems
3.4. Automation and System Intelligence
3.5. Cost and Accessibility
3.6. Validation and Real-World Testing
4. Discussion
Mathematical and Computational Challenges in Assistive Mobility Systems
5. Limitations of the Review Process
6. Conclusions
- Development of adaptive terrain-handling mechanisms suitable for unstructured and outdoor environments;
- Design of human-centered control systems that minimize cognitive and physical demands across a wide range of user abilities;
- Implementation of scalable and modular system architectures to enhance affordability and long-term serviceability;
- Integration of telehealth and IoT functionalities to support continuous care, monitoring, and communication;
- Application of ergonomic design principles and computational optimization to balance performance with comfort and usability;
- Greater engagement in participatory testing and co-design processes that involve end-users from the earliest development phases;
- Systematic analysis and documentation of the mathematical models and control algorithms to improve comparability, reproducibility, and performance evaluation.
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Tangcharoensathien, V.; Witthayapipopsakul, W.; Viriyathorn, S.; Patcharanarumol, W. Improving Access to Assistive Technologies: Challenges and Solutions in Low- and Middle-Income Countries. WHO South-East Asia J. Public Health 2018, 7, 84–89. [Google Scholar] [CrossRef]
- Desai, S.; Mantha, S.; Phalle, V. Advances in Smart Wheelchair Technology. In Proceedings of the 2017 International Conference on Nascent Technologies in Engineering (ICNTE), Vashi, India, 27–28 January 2017. [Google Scholar]
- WHO. Global Report on Assistive Devices; WHO: Geneva, Switzerland, 2022; ISBN 9789240049451. [Google Scholar]
- Mistarihi, M.Z. A Data Set on Anthropometric Measurements and Degree of Discomfort of Physically Disabled Workers for Ergonomic Requirements in Work Space Design. Data Br. 2020, 30, 105420. [Google Scholar] [CrossRef]
- Ebrahimi, A.; Kazemi, A.; Ebrahimi, A. Review Paper: Wheelchair Design and Its Influence on Physical Activity and Quality of Life Among Disabled Individuals. Iran. Rehabil. J. 2016, 14, 85–92. [Google Scholar] [CrossRef]
- Ferrière, L.; Fisette, P.; Raucent, B.; Vaneghem, B. Contribution to the Modelling of a Mobile Robot Equipped with Universal Wheels. IFAC Proc. Vol. 1997, 30, 675–682. [Google Scholar] [CrossRef]
- Gfrerrer, A. Geometry and Kinematics of the Mecanum Wheel. Comput. Aided Geom. Des. 2008, 25, 784–791. [Google Scholar] [CrossRef]
- Mecanum Wheel. Available online: https://commons.wikimedia.org/wiki/File:Meacnum_Rad.png (accessed on 14 March 2025).
- Omniwheel Wikimedia. Available online: https://en.wikipedia.org/wiki/File:Triple_Rotacaster_commercial_industrial_omni_wheel.jpg (accessed on 14 March 2025).
- Song, J.-B.; Byun, K.-S. Design and Control of a Four-Wheeled Omnidirectional Mobile Robot with Steerable Omnidirectional Wheels. J. Robot. Syst. 2004, 21, 193–208. [Google Scholar] [CrossRef]
- Doroftei, I.; Stirbu, B. Design, Modeling and Control of an Omni-Directional Mobile Robot. In Proceedings of the Robotics and Automation Systems, Orlando, FL, USA, 12–14 July 2010; Trans Tech Publications Ltd.: Stafa-Zurich, Switzerland, 2010; Volume 166, pp. 173–178. [Google Scholar]
- Han, K.-L.; Kim, H.; Lee, J.S. The Sources of Position Errors of Omni-Directional Mobile Robot with Mecanum Wheel. In Proceedings of the 2010 IEEE International Conference on Systems, Man and Cybernetics, Istanbul, Turkey, 10–13 October 2010; pp. 581–586. [Google Scholar]
- Holmberg, R.; Khatib, O. Development and Control of a Holonomic Mobile Robot for Mobile Manipulation Tasks. Int. J. Rob. Res. 2000, 19, 1066–1074. [Google Scholar] [CrossRef]
- Batlle, J.A.; Barjau, A. Holonomy in Mobile Robots. Rob. Auton. Syst. 2009, 57, 433–440. [Google Scholar] [CrossRef]
- Adascalitei, F.; Asachi, G.; Adăscăliţei, F. Practical Applications for Mobile Robots Based on Mecanum Wheels-A Systematic Survey The Romanian Review Precision Mechanics. Opt. Mechatron. 2011, 40, 21–29. [Google Scholar]
- Bae, J.J.; Kang, N. Design Optimization of a Mecanum Wheel to Reduce Vertical Vibrations by the Consideration of Equivalent Stiffness. Shock Vib. 2016, 2016, 5892784. [Google Scholar] [CrossRef]
- Bayar, G.; Ozturk, S. Investigation of The Effects of Contact Forces Acting on Rollers of a Mecanum Wheeled Robot. Mechatronics 2020, 72, 102467. [Google Scholar] [CrossRef]
- Candiotti, J.L.; Neti, A.; Sivakanthan, S.; Cooper, R.A. Analysis of Whole-Body Vibration Using Electric Powered Wheelchairs on Surface Transitions. Vibration 2022, 5, 98–109. [Google Scholar] [CrossRef]
- Ferrière, L.; Campion, G.; Raucent, B. ROLLMOBS, a New Drive System for Omnimobile Robots. Robotica 2001, 19, 1–9. [Google Scholar] [CrossRef]
- Watanabe, Y.; Shigekane, A.; Matsumoto, K.; Kawamura, A.; Kurazume, R. Development of Mobile Sensor Terminals “Portable Go” for Navigation in Informationally Structured and Unstructured Environments. ROBOMECH J. 2019, 6, 6. [Google Scholar] [CrossRef]
- Kato, H.; Komori, M.; Terakawa, T. Human-Powered Vehicle Capable of Movement in the Longitudinal and Lateral Directions. J. Adv. Mech. Des. Syst. Manuf. 2020, 14, JAMDSM0082. [Google Scholar] [CrossRef]
- Dai, S.; Liu, R.; Zhang, H. Vibration Characteristic Analysis of Electric Wheelchair-Pavement Coupling System Based on Mecanum Wheel. J. Vib. Shock 2020, 39, 245–252. [Google Scholar]
- Satoh, Y.; Sakaue, K. A Secure and Reliable next Generation Mobility. Synthesiology 2009, 2, 107–120. [Google Scholar] [CrossRef]
- Satoh, Y.; Sakaue, K. An Omnidirectional Stereo Vision-Based Smart Wheelchair. Eurasip J. Image Video Process. 2007, 2007, 87646. [Google Scholar] [CrossRef]
- Bühler, C.; Hoelper, R.; Hoyer, H.; Humann, W. Autonomous Robot Technology for Advanced Wheelchair and Robotic Aids for People with Disabilities. Rob. Auton. Syst. 1995, 14, 213–222. [Google Scholar] [CrossRef]
- Seo, J.; Kim, C.W. 3D Depth Camera-Based Obstacle Detection in the Active Safety System of an Electric Wheelchair. J. Inst. Control Robot. Syst. 2016, 22, 552–556. [Google Scholar] [CrossRef]
- Faria, B.M.; Reis, L.P.; Lau, N. Adapted Control Methods for Cerebral Palsy Users of an Intelligent Wheelchair. J. Intell. Robot. Syst. 2015, 77, 299–312. [Google Scholar] [CrossRef]
- Sivakanthan, S.; Candiotti, J.L.; Sundaram, S.A.; Battles, C.; Daveler, B.J.; Chung, C.S.; Grindle, G.G.; Cooper, R.; Dicianno, B.E.; Cooper, R.A. Usability Evaluation of Attitude Control for a Robotic Wheelchair for Tip Mitigation in Outdoor Environments. Med. Eng. Phys. 2020, 82, 86–96. [Google Scholar] [CrossRef]
- Candiotti, J.; Daveler, B.; Sivakanthan, S.; Grindle, G.; Cooper, R.; Cooper, R. Curb Negotiation with Dynamic Human-Robotic Wheelchair Collaboration. IEEE Trans. Hum.-Mach. Syst. 2022, 52, 149–155. [Google Scholar] [CrossRef] [PubMed]
- Candiotti, J.; Andrea Sundaram, S.; Daveler, B.; Gebrosky, B.; Grindle, G.; Wang, H.; Cooper, R.A. Kinematics and Stability Analysis of a Novel Power Wheelchair When Traversing Architectural Barriers. Top. Spinal Cord Inj. Rehabil. 2017, 23, 110–119. [Google Scholar] [CrossRef] [PubMed]
- Flores, P.A.; Arias, J.L. Omnidirectional Wheelchair with Suspension System for Mobility on Uneven Terrains. Eng. Proc. 2025, 83, 25. [Google Scholar] [CrossRef]
- Wada, M. Omnidirectional and Holonomic Mobile Platform with Four-Wheel-Drive Mechanism for Wheelchairs. J. Robot. Mechatron. 2007, 19, 264–271. [Google Scholar] [CrossRef]
- Wada, M. A 4WD Omnidirectional Wheelchair with Enhanced Step Climbing Capability. J. Robot. Mechatron. 2008, 20, 846–853. [Google Scholar] [CrossRef]
- Zhang, Z.; Yu, H.; Wu, C.; Huang, P.; Wu, J. A Comprehensive Study on Mecanum Wheel-Based Mobility and Suspension Solutions for Intelligent Nursing Wheelchairs. Sci. Rep. 2024, 14, 20644. [Google Scholar] [CrossRef]
- Kawata, T.; Sato, F.; Tsuji, S.; Suzuki, T.; Suzuki, T.; Kokuryu, T. A Study on the Running of a Joystick-Type Six-Wheeled Electric Wheelchair When Curb Climbing. Machines 2024, 12, 568. [Google Scholar] [CrossRef]
- Kundu, A.S.; Mazumder, O.; Lenka, P.K.; Bhaumik, S. Hand Gesture Recognition Based Omnidirectional Wheelchair Control Using IMU and EMG Sensors. J. Intell. Robot. Syst. Theory Appl. 2018, 91, 529–541. [Google Scholar] [CrossRef]
- Yu, Y.; Zhou, Z.; Liu, Y.; Jiang, J.; Yin, E.; Zhang, N.; Wang, Z.; Liu, Y.; Wu, X.; Hu, D. Self-Paced Operation of a Wheelchair Based on a Hybrid Brain-Computer Interface Combining Motor Imagery and P300 Potential. IEEE Trans. Neural Syst. Rehabil. Eng. 2017, 25, 2516–2526. [Google Scholar] [CrossRef] [PubMed]
- Isah, R.O.; Olaniyi, O.M.; Kolo, J.G.; Babatunde, D.Z. A Smart Omnidirectional Controlled Wheelchair. J. Eng. Sci. 2020, 27, 88–102. [Google Scholar] [CrossRef]
- Yadav, P.S.; Agrawal, V.; Mohanta, J.C.; Faiyaz Ahmed, M.D. A Robust Sliding Mode Control of Mecanum Wheel-Chair for Trajectory Tracking. Mater. Today Proc. 2022, 56, 623–630. [Google Scholar] [CrossRef]
- Chotikunnan, R.; Chotikunnan, P.; Thongpance, N.; Puttasakul, T.; Pititheeraphab, Y.; Sangworasil, M. Application of PID Control System in Mecanum Wheelchair. Int. J. Membr. Sci. Technol. 2023, 10, 3519–3529. [Google Scholar] [CrossRef]
- Lee, D.; Kim, S. Design and Control of a Novel Detachable Driving Module for Electrification of Manual Wheelchairs. IEEE Access 2023, 11, 10169–10179. [Google Scholar] [CrossRef]
- Li, Y.; Dai, S.; Zheng, Y.; Tian, F.; Yan, X. Modeling and Kinematics Simulation of a Mecanum Wheel Platform in RecurDyn. J. Robot. 2018, 2018, 9373580. [Google Scholar] [CrossRef]
- Thongpance, N.; Chotikunnan, P. Design and Construction of Electric Wheelchair with Mecanum Wheel. J. Robot. Control 2023, 4, 71–82. [Google Scholar] [CrossRef]
- Zhu, Y.; Meng, Q.; Yu, H.; Wang, H.; Hu, J.; Li, P.; Hu, B. Wheelchair Automatic Docking Method for Body-Separated Nursing Bed Based on Grid Map. IEEE Access 2021, 9, 79549–79561. [Google Scholar] [CrossRef]
- Tatemoto, T.; Saitoh, E.; Tanabe, S.; Koyama, S.; Kumazawa, N.; Furuzawa, S.; Kato, T.; Yoshimuta, H.; Torii, K.; Kiyono, K.; et al. Lateral Transfer Assist Robot (LTAR): Development of a Proof-of-Concept Prototype. Technol. Health Care 2020, 28, 175–183. [Google Scholar] [CrossRef]
- Sang, L.; Yamamura, M.; Dong, F.; Gan, Z.; Fu, J.; Wang, H.; Tian, Y. Analysis, Design, and Experimental Research of a Novel Wheelchair-Stretcher Assistive Robot. Appl. Sci. 2020, 10, 264. [Google Scholar] [CrossRef]
- Hsu, P.E.; Hsu, Y.L.; Chang, K.W.; Geiser, C. Mobility Assistance Design of the Intelligent Robotic Wheelchair. Int. J. Adv. Robot. Syst. 2012, 9, 244. [Google Scholar] [CrossRef]
- Catalan, J.M.; Blanco, A.; Bertomeu-Motos, A.; Garcia-Perez, J.V.; Almonacid, M.; Puerto, R.; Garcia-Aracil, N. A Modular Mobile Robotic Platform to Assist People with Different Degrees of Disability. Appl. Sci. 2021, 11, 7130. [Google Scholar] [CrossRef]
- Borgolte, U.; Hoyer, H.; Bühler, C.; Heck, H.; Hoelper, R. Architectural Concepts of a Semi-Autonomous Wheelchair; Springer: Berlin/Heidelberg, Germany, 1998; Volume 22. [Google Scholar]
- Liu, K.; Yu, Y.; Liu, Y.; Tang, J.; Liang, X.; Chu, X.; Zhou, Z. A Novel Brain-Controlled Wheelchair Combined with Computer Vision and Augmented Reality. Biomed. Eng. Online 2022, 21, 50. [Google Scholar] [CrossRef] [PubMed]
- Al-Ajmi, M.H.; Al-Osaimi, M.Z.; Al-Osaimi, T.A.; Al-Kandari, A.S.; Al-Rashed, M.S.; Said, S.; Karar, A.S.; Alkork, S. Design and Implementation of a Smart Electric Omnidirectional Wheelchair Using Consumer Off-the-Shelf Components. In Proceedings of the 2023 5th International Conference on Bio-Engineering for Smart Technologies (BioSMART), Paris, France, 7–9 June 2023; pp. 1–5. [Google Scholar] [CrossRef]
- Matsuo, K. Implementation and Experimental Evaluation of an Omnidirectional Wheelchair for Sports and Moving in Rooms with Narrow Spaces. Int. J. Space-Based Situated Comput. 2017, 7, 1. [Google Scholar] [CrossRef]
- Kang, J.W.; Kim, B.S.; Chung, M.J. Development of Omni-Directional Mobile Robots with Mecanum Wheels Assisting the Disabled in a Factory Environment. In Proceedings of the 2008 International Conference on Control, Automation and Systems, Seoul, Republic of Korea, 14–17 October 2008; pp. 2070–2075. [Google Scholar] [CrossRef]
- Liao, V.; Varshney, K. Human-Centered Explainable AI (XAI): From Algorithms to User Experiences. arXiv 2021, arXiv:2110.10790. [Google Scholar]
- Sivakanthan, S.; Candiotti, J.L.; Sundaram, A.S.; Duvall, J.A.; Sergeant, J.J.G.; Cooper, R.; Satpute, S.; Turner, R.L.; Cooper, R.A. Mini-Review: Robotic Wheelchair Taxonomy and Readiness. Neurosci. Lett. 2022, 772, 136482. [Google Scholar] [CrossRef]
- Meligy, R.; Ahmad, A.R.; Mekid, S. An IoT-Based Smart Wheelchair with EEG Control and Vital Sign Monitoring. Eng. Proc. 2024, 82, 46. [Google Scholar] [CrossRef]
- Hou, L.; Latif, J.; Mehryar, P.; Withers, S.; Plastropoulos, A.; Shen, L.; Ali, Z. An Autonomous Wheelchair with Health Monitoring System Based on Internet of Thing. Sci. Rep. 2024, 14, 5878. [Google Scholar] [CrossRef]
- Ghanayem, H.; Alathamneh, M.; Nelms, R.M. PMSM Field-Oriented Control with Independent Speed and Flux Controllers for Continuous Operation under Open-Circuit Fault at Light Load Conditions. Energies 2024, 17, 593. [Google Scholar] [CrossRef]
- Li, Y.; Ge, S.; Dai, S.; Zhao, L.; Yan, X.; Zheng, Y.; Shi, Y. Kinematic Modeling of a Combined System of Multiple Mecanum-Wheeled Robots with Velocity Compensation. Sensors 2020, 20, 75. [Google Scholar] [CrossRef]
- Welihinda, D.V.D.S.; Gunarathne, L.K.P.; Herath, H.M.K.K.M.B.; Yasakethu, S.L.P.; Madusanka, N.; Lee, B.-I. EEG and EMG-Based Human-Machine Interface for Navigation of Mobility-Related Assistive Wheelchair (MRA-W). Heliyon 2024, 10, e27777. [Google Scholar] [CrossRef] [PubMed]


{kind=link}
{kind=link}
| Study | Function | Construction | Mobility Impact | Mechanical Innovation | Control Innovation | Motors | Recommendations |
|---|---|---|---|---|---|---|---|
| Sivakanthan et al. [28]; Candiotti et al. [29,30] | Obstacle climbing, slope balance (6 wheels, seat leveling). | Six-wheel (two classic, four omni) base with pneumatic seat actuators; sliding PMDC modules; R-NET control; force sensor to track center of mass. | Safe curb/ramp climbing. Center of mass kept inside base. Stable indoors and outdoors. | Six wheels and actuators auto-adjust seat tilt/height; extendable wheel modules for curb climbing. | Tilt control (gyro + accelerometer); self-leveling; separate R-NET (drive) and dsPIC (seat) controllers. | Two PMDC motors for sliding drive modules; pneumatic actuators + gas springs. | Add front rollers as anti-tip, improve leveling algorithms, reduce speed on obstacles for safety. |
| Flores and Arias [31] | Off-road mobility on uneven terrain. | Mecanum (four-wheel); independent spring damper suspension; dynamic modeling with Lagrange equations. | Total of 75% vibration reduction, <0.6° tilt. | Rectangular 4 × 4 platform with suspended wheels. | Joystick control; dynamic model aids stability during driving. | Four DC motors (~50 Nm each). | Tune suspension and motor selection for off-road use; build prototype and conduct terrain tests. |
| Wada [32] | Holonomic drive on slippery, uneven surfaces; curb climbing. | 4WD: Hybrid (two front omni wheels + two rear pneumatic tires); belt-synchronized three-motor drive; large wheels for traction. | Better grip, holonomic motion in tight spaces, improved step climbing via 4WD and large wheels. | Synchronized drive for all wheels; torque boost mechanism aids curb ascent. | Two motors for drive, third for rotation; twin-caster system for synchronized motion. | Three DC motors (100 W, ~0.95 Nm). | Optimize motor torque and wheel size, field tests; adapt to 100 mm steps (friction ≥ 0.7). |
| Wada [33] | 4WD wheelchair for users with low strength; curb climbing and maneuvering. | Hybrid (two front omni wheels + two rear pneumatic tires); belt drive; frame tilt shifts weight forward; three-motor holonomic system. | Enhanced curb climbing and maneuverability via synchronized wheels, traction and center-of-mass tilt. | Front omni + rear pneumatic wheels; frame tilt −20° to +20° improves stability. | Three DOF control integrates omni, rear, and tilt modules for smooth stable motion. | Three motors (two for wheels, one for frame tilt; specs not given). | Train users to improve performance; analyze user posture (leaning) on stability and climbing. |
| Zhewen et al. [34] | Better maneuvering in tight spaces (e.g., toilet) with Mecanum (four-wheel) | Mecanum (four-wheel); independent suspension; wide base; guidance mechanism; spring dampers. | Smooth motion in tight areas like hospital bathrooms. Outperforms traditional wheelchairs on small obstacles. | Holonomic drive; independent suspension; angled wheels; guidance system for reduced drag. | Independent omni wheel control; hybrid suspension; kinematic simulation for performance. | Four DC motors (24 V/250 W, one per Mecanum wheel). | Add smart rehab features; develop hybrid suspension for better stability. |
| Kawata et al. [35] | Improves curb climbing | Six-wheel (two classic, four omni); passive linkages; front/rear levers balance load; curb climbing without bigger wheels; central wheel assists. | Enables 96 mm curb climb with 200 mm front wheels; optimal weight distribution enables obstacle navigation. | Modified frame with levers and passive linkages; omni + support rollers improve turning. | Variable suspension stiffness; torque balancing; yaw control for comfort. | Two drive motors (not specified) | Refine suspension and frame for better shock absorption; test yaw control system; user feedback integration. |
| Study | Function | Construction | Mobility Impact | Mechanical Innovation | Control Innovation | Motors | Recommendations |
|---|---|---|---|---|---|---|---|
| Kundu et al. [36] | Hand gesture control (IMU + EMG); joystick alternative. | Omni wheels (four); steel frame; nine-axis IMU + EMG; DSVM classifier; battery-powered. | In total, ~94% gesture detection in training, ~90.5% real-time; suitable for users with hand/arm impairments. | Dual omni wheels in “L” config reduce axial loads; motorcycle dampers increase traction. | IMU + EMG detect seven gestures mapped to motion; DSVM classification ensures real-time response. | 4 × 77 W DC motors (Bühler, 24 V) | Test with users with upper-limb disabilities; add vision sensors for navigation. |
| Yadav et al. [39] | Slip-resilient path tracking (accurate trajectory tracking). | Mecanum (four-wheel); wheel encoders; dynamic slippage model. | Accurate trajectory tracking, even on slippery surfaces. Outperforms classic PID controller. | N/A | Sliding mode control (SMC) with anti-chatter ensures smooth, stable control. | 4 DC motors with feedback loops | Add adaptive control to adjust to varying terrain/load, deploy on physical device. |
| Isah et al. [38] | Web app control via Wi-Fi + obstacle avoidance. | Mecanum (four-wheel); onboard Raspberry Pi 3; ultrasonic sensors. | Remote caregiver operation; auto obstacle avoidance (~87–94% accuracy); ~1 s command response time. | N/A | Web app interface; ultrasonic obstacle detection and avoidance. | 4 × 12 V DC motors, 17.04 W each (68 W total) | Improve network safety and latency; add camera/vision system, implement emergency stop. |
| Yu et al. [37] | Contactless control via BCI for paralyzed users. | Mecanum (four-wheel); EEG cap + processor; standard electric wheelchair base. | Enables independent control by fully paralyzed users; asynchronous BCI ~85–90% accuracy. | N/A | Hybrid BCI: continuous (motor imagery) + discrete (P300); asynchronous user command input. | Two DC motors (standard wheelchair motors) | Add obstacle avoidance, implement semi-autonomous modes to reduce workload. |
| Chotikunnan et al. [40] | Precision motion control (trajectory, direction tracking). | Mecanum (four-wheel) electric wheelchair; Arduino Due controller; encoders; 24 V battery. | Fast response, <5% overshoot; smooth omnidirectional motion. | N/A | PID controller (Cohen–Coon tuned); optimal PD gains: Kp = 80, Kd = 1.2. | 4 × LX44WG2490 DC motors, 60 kg·cm @ 71 RPM (173 kg·cm avg torque) | Add integral term (PID) for speed regulation at low speeds; tune controller for varying loads. |
| Study | Function | Construction | Mobility Impact | Mechanical Innovation | Control Innovation | Motors | Recommendations |
|---|---|---|---|---|---|---|---|
| Lee et al. [41] | Detachable power module to electrify manual wheelchair; smooth motion. | Omni wheels, detachable unit with “tong” clamp; spring damper; flat BLDC motor; FOC provides stable torque at low speeds. | Enables users to convert manual chairs to electric easily; smooth curb climbing, reduced vibration. | Clamp-type mount; integrated suspension; flat high-thrust BLDC motors. | Sensorless FOC + PWM ensures efficient low-speed control; no Hall sensors needed. | Two flat BLDC motors (120 KV, ~12 kgf); one motor (115 KV, ~5 kgf). | Add sensors for safety/navigation; improve battery life and user comfort; field testing recommended. |
| Li et al. [42] | Full omnidirectional mobility; precise kinematics modeling (simulation). | Mecanum (four-wheel) + rollers; swing arms; differential gear splits power; software converts inputs to wheel speed. | Smooth motion in all directions; differential and swing arms boost ground contact; useful in tight indoor spaces. | Differential and articulated frame ensure stability; modular build for easy service. | Adaptive stabilization; real-time sensors; trajectory planning; simulated feedback loop. | Not specified. | Add sensors (LiDAR/ultrasound); use machine learning; improve battery efficiency and user adaptation. |
| Thongpance et al. [43] | Cost-effective Mecanum wheelchair; | Mecanum (four-wheel); Arduino Due joystick controller with filter; 24 V battery; buzzer; steel frame; shock absorbers; modular design. | Smooth omnidirectional motion;; maneuverable and reliable across different real-world indoor scenarios. | Mecanum wheels (three DOF); detachable modules reduce cost and increase serviceability. | Velocity vector calc on Arduino; joystick input with filtering; stable and accurate control. | Four DC motors (LX44WG2490, 24 V, 60 kg·cm @ 71 rpm). | Add closed-loop speed control; profile ramp-up to improve smoothness and comfort. |
| Study | Function | Construction | Mobility Impact | Mechanical Innovation | Control Innovation | Motors | Recommendations |
|---|---|---|---|---|---|---|---|
| Zhu et al. [44] | Automatic wheelchair docking to care bed. | Mecanum (four-wheel); modular build; LiDAR scanner; V-marker for localization; PID controller; grid map path planning. | Enables independent bed access; reduces caregiver effort; accurate and portable. | Modular frame for transfer; V-marker docking; differential drive. | LiDAR-based positioning and obstacle detection; PID-stabilized docking. | Differential drive motors. | Integrate vision and voice control; optimize path planning and sensor data filtering. |
| Tatemoto et al. [45] | Lateral transfer automation (LTAR). | Mecanum (four-wheel); joystick + push button interface; armrest/footrest adjusters; seat height memory. | Smooth, safe bed transfer; reduces caregiver lifting strain; suitable for tight home spaces. | Mecanum-based motion; synchronized height adjustment for transfer. | Three-dimensional joystick; auto-adjust seat/leg/armrest to bed height. | Not specified. | Redesign joystick for users with limited dexterity, improve sensor precision, and conduct home testing. |
| Sang et al. [46] | Wheelchair + stretcher hybrid for smooth patient transfer. | Mecanum (four-wheel); lifting mechanism; five-link folding frame; STM32 controller; remote operation. | Enables mode switching and bed docking; improves caregiver efficiency and user safety. | Five-link folding; height-adjustable frame; ergonomic, lightweight design. | STM32-based coordinated motion; real-time feedback via remote. | 36SYK71 motor + P52HA planetary + NMRV040 worm gear reducer. | Add sensors for autonomous navigation, lighter materials, and user-centered design improvements. |
| Hsu et al. [47] | Smart wheelchair (iRW) with multiple control modes. | Mecanum (four-wheel); 24V DC motors; Arduino Mega; joystick + tablet control; QR navigation; telemedicine module. | Enables multi-mode operation: manual, remote, autonomous; high maneuverability in tight indoor areas. | N/A | Five control modes incl. remote + indoor navigation; sensor-based collision avoidance. | 4 × 24 V DC motors, 3 A max, 4900 RPM each. | Add full autonomy, improve user interface, and enhance usability and responsiveness. |
| Catalan et al. [48] | Autonomous platform with multimodal interface for severe disabilities. | Mecanum (four-wheel); laser sensors; SLAM + AMCL; voice, gaze, EMG, and BCI control; modular structure. | Autonomous navigation + home automation control; customizable for individual needs. | Omni-drive for tight spaces; modular expansion ports. | Hybrid BCI + voice + EMG + gaze interface; SLAM/AMCL for navigation. | Not specified. | Enable telecare integration, user trials for interface comfort, add LiDAR, and improve battery. |
| Borgolte et al. [49] | Semi-autonomous driving; route recording/playback + collision avoidance. | Mecanum (four-wheel), modular system omni drive; HMI interface; obstacle sensors; memory-based driving. | Enables navigation in complex environments with pre-saved routes and real-time obstacle avoidance. | Mecanum drive; lifting seat; ergonomic compact frame. | Path playback + real-time safety sensors; joystick/auto switching. | Four BLDC motors (±10 V DAC). | Upgrade obstacle sensing; refine control algorithms; improve comfort and modularity. |
| Liu et al. [50] | BCI control + autonomous navigation to destination (CVAR-BCW). | Mecanum (four-wheel), standard wheelchair base; BCI with P300; AR display; computer vision; onboard PC. | Users select targets via EEG; auto navigation halves trip time vs. manual control. | N/A | P300-based BCI + AR interface; auto routing via vision system. | Two standard DC motors. | Apply AI for dynamic environments, improve visual processing and real-world testing. |
| Study | Function | Construction | Mobility Impact | Mechanical Innovation | Control Innovation | Motors | Recommendations |
|---|---|---|---|---|---|---|---|
| Al-Ajmi et al. [51] | Low-cost smart omnidirectional wheelchair (DIY approach). | Mecanum (four-wheel); used standard wheelchair frame; hobbyist Mecanum wheels; Arduino; basic sensors. | Fully functional holonomic mobility at minimal cost using commercial parts. | Focus on off-the-shelf components rather than custom designs. | Smartphone app control (Bluetooth); basic obstacle sensors; open-source software. | Four DC motors (off-the-shelf kit); consumer battery. | Reinforce structure; add vision or smart sensors; user testing to improve safety and usability. |
| Borgolte et al. [49] | Semi-autonomous driving; route recording/playback + collision avoidance. | Modular system; omni drive; HMI interface; obstacle sensors; memory-based driving. | Enables navigation in complex environments with pre-saved routes and real-time obstacle avoidance. | Mecanum drive; lifting seat; ergonomic compact frame. | Path playback + real-time safety sensors; joystick/auto switching. | Four BLDC motors (±10 V DAC). | Upgrade obstacle sensing; refine control algorithms; improve comfort and modularity. |
| Thongpance et al. [43] | Cost-effective. | Mecanum (four-wheel); Arduino Due joystick controller with filter; 24 V battery; buzzer; steel frame; shock absorbers; modular design. | Smooth omnidirectional motion; maneuverable and reliable across different real-world indoor scenarios. | Mecanum wheels (three DOF); detachable modules reduce cost and increase serviceability. | Velocity vector calculations on Arduino; joystick input with filtering; stable and accurate control. | Four DC motors (LX44WG2490, 24 V, 60 kg·cm @ 71 rpm). | Add closed-loop speed control; profile ramp-up to improve smoothness and comfort. |
| Study | Function | Construction | Mobility Impact | Mechanical Innovation | Control Innovation | Motors | Recommendations |
|---|---|---|---|---|---|---|---|
| Wada [32] | Holonomic drive on slippery, uneven surfaces; curb climbing. | 4WD: rear normal wheels, front omni; belt-synchronized three-motor drive; large wheels for traction. | Better grip, holonomic motion in tight spaces, improved step climbing via 4WD and large wheels. | Synchronized drive for all wheels; torque boost mechanism aids curb ascent. | Two motors for drive, third for rotation; twin-caster system for synchronized motion. | Three DC motors (100 W, ~0.95 Nm). | Adapt to 100 mm steps (friction ≥ 0.7); field tests; optimize motor torque and wheel size. |
| Catalan et al. [48] | Autonomous platform with multimodal interface for severe disabilities. | Omni wheels; laser sensors; SLAM + AMCL; voice, gaze, EMG, and BCI control; modular structure. | Autonomous navigation + home automation control; customizable for individual needs. | Omni-drive for tight spaces; modular expansion ports. | Hybrid BCI + voice + EMG + gaze interface; SLAM/AMCL for navigation. | Not specified. | Add LiDAR, improve battery; user trials for interface comfort; enable telecare integration. |
| Matsuo [52] | Compact sports wheelchair for tight indoor spaces. | Small triangle-base with three omni wheels; lightweight frame. | Agile maneuvering in gyms and narrow corridors; fast holonomic movement useful in sports. | Triangle omni wheel setup for tight motion; minimal chassis. | Standard joystick, tuned for quick response. | Not specified. | Test in real games; tune top speed and stability for dynamic play. |
| Kang et al. [53] | Holonomic wheelchair for factory workers (person + cargo). | Sturdy four-Mecanum base; reinforced frame; optional suspension for minor obstacles. | Maneuverable in crowded workshops; allows carrying tools/materials; improves workplace accessibility. | High-load frame with Mecanum wheels; optional shock absorbers. | Basic joystick/buttons; focus on reliability in industrial use. | Four industrial-grade high-torque motors. | Add auto-navigation on predefined paths; redesign interface for task-specific control. |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Burkacki, M.; Łysy, I.; Suchoń, S.; Chrzan, M.; Kowolik, R. Systematic Review of Mecanum and Omni Wheel Technologies for Motor Impairments. Appl. Sci. 2025, 15, 4773. https://doi.org/10.3390/app15094773
Burkacki M, Łysy I, Suchoń S, Chrzan M, Kowolik R. Systematic Review of Mecanum and Omni Wheel Technologies for Motor Impairments. Applied Sciences. 2025; 15(9):4773. https://doi.org/10.3390/app15094773
Chicago/Turabian StyleBurkacki, Michał, Ilona Łysy, Sławomir Suchoń, Miłosz Chrzan, and Rafał Kowolik. 2025. "Systematic Review of Mecanum and Omni Wheel Technologies for Motor Impairments" Applied Sciences 15, no. 9: 4773. https://doi.org/10.3390/app15094773
APA StyleBurkacki, M., Łysy, I., Suchoń, S., Chrzan, M., & Kowolik, R. (2025). Systematic Review of Mecanum and Omni Wheel Technologies for Motor Impairments. Applied Sciences, 15(9), 4773. https://doi.org/10.3390/app15094773