1. Introduction
Due to the advances of computer hardware and material engineering, electroactive polymers (EAPs), which can be grouped into two categories of ionic and non-ionic EAPs, have recently been receiving a great deal of attention as a raw material for compact haptic actuators. In ionic EAPs, positive ions move toward the cathode under voltage input, and this movement makes the ionic EAP actuate. For making ionic EAP actuators, researchers have been studying hydrogels and ionic polymer metal composites (IPMCs). Xue et al. developed an electrically controllable supramolecular hydrogel as an actuator from a self-assembling short peptide [
1]. Lee et al. investigated the effect of metal ion type on the movement of catechol-modified hydrogel actuators and revealed that the type of an ionoprinted metal ion can be used to tune the rate and extent of actuation for catechol-containing hydrogel [
2]. Yang et al. proposed a soft bending actuator with graphene oxide-containing hydrogels to enhance its bending [
3]. Migliorini et al. presented an underwater soft actuator using Na-4-vinylbenzenesulfonate (Na-4-VBS) based homeostatic hydrogel [
4]. Feng et al. presented an actuator for controlling scissor-type grippers using IPMC [
5]. Tas et al. developed an ion-selective IPMC actuator based on crown ether [
6]. Although the ionic EAP creates a large bending motion under relatively low input voltage (1~3 V), it is normally operated in wet conditions and it requires high electric power (high electric current) for operation. Another problem is that its actuation force is not sufficiently strong to stimulate human skin. Unlike ionic EAP, non-ionic EAP has a fast response time and can create stronger force [
7]. A new vibrotactile tactile module (ViviTouchTM) based on a non-ionic EAP was developed in order to convey realistic haptic sensation to game users [
8]. Since the performance of the non-ionic EAP is influenced by the ratio of pre-stretching, a new mechanism for stretching the non-ionic EAP was addressed [
9,
10]. An arrayed tactile display with liquid coupling was presented using a non-ionic EAP [
11]. Graphene or hydrogel was applied to transparent non-ionic EAPs to make the actuator transparent [
12,
13]. In the case of non-ionic EAP, it quickly expands in planar directions and compresses the thickness direction when voltage is applied to the electrodes, which are attached at both sides of the EAP. As soon as the applied voltage is removed, the non-ionic EAP quickly returns to its original shape. By this fast response behavior, non-ionic EAPs have been used for vibrotactile actuators. However, non-ionic EAPs require a pre-stretching or multi-stacking process to maximize force that is strong enough to stimulate human mechanoreceptors. Since the pre-stretching process for a non-ionic EAP makes the thickness of the actuator thin, it can be easily torn by small external force, even the high input voltage [
14]. Another problem is that the non-ionic EAPs require stretchable electrodes. These problems cause low durability and/or a complex manufacturing process in fabrication of a haptic actuator based on non-ionic EAPs.
In order to solve these problems, a non-ionic plasticized polyvinyl chloride gel (PVC gel) was previously introduced [
15,
16]. The PVC gel shows electroactive and reconfigurable behavior with applied voltage. When we provide voltage input to the PVC gel, the PVC gel deforms toward an anode. As we remove a voltage input, it quickly returns to its initial shape by the elastic restoring force of the PVC gel, observing reversible deformation. Additionally, the PVC gel does not need stretchable electrodes for operation. Due to the characteristics of the PVC gel, it can serve as a material for a soft thin-film vibrotactile actuator. A contraction type soft actuator using poly vinyl chloride gel was developed [
17]. Their work has excellent performance in contraction at low frequency. However, it is not easy to use their work to fabricate vibrotactile actuators which are operated at high frequencies (over 150 Hz).
Generally, the elastic restoring force is proportional to the displacement. Hence, to maximize the displacement in a small and thin actuator, wave-shaped PVC gel, which has valleys and ridges, was designed [
15]. This wave-shaped PVC gel having valleys and ridges was placed between two parallel electrodes, and the valleys and the ridges were contacted to an upper electrode (for a cathode) and a lower electrode (for an anode), respectively. Under applied electric voltage, the deformation of the PVC gel mostly occurs at the ridges of the wave-shaped PVC gel, while the deformation scarcely occurs at the valleys of the wave-shaped PVC gel. That is, applied electric energy at the valleys of the wave-shaped PVC gel makes a very small contribution to the actuation of the PVC gel and almost disappears. In order to overcome the limitations of the wave-shaped PVC gel with valleys and ridges, it is necessary to consider a new structure which maximizes its vibrational force.
In this paper, we propose a new structure of an electroactive PVC gel based vibrotactile actuator for increasing vibrational force with minimizing energy loss. Furthermore, we conduct an experiment to investigate four haptic behaviors (one is from the proposed actuator and the others are from the previously presented flexible actuators) and to compare them. The results show that the haptic behavior of the proposed actuator is superior to the previous actuators and the proposed actuator can be applied to consumer electronic devices—such as flexible display devices, smart watches, and smart bands—to create haptic sensation. This paper is organized as follows.
Section 2 briefly describes the previously proposed flexible vibrotactile actuator and its disadvantages. In
Section 3, a new design of a new-shaped soft thin-film vibrotactile actuator based on PVC gel is proposed. In
Section 4, we quantitatively measure the haptic behavior of the proposed actuator, and compare the haptic behavior of the proposed actuator with other previously presented soft vibrotactile actuators. Furthermore, we investigate the haptic behavior of the proposed actuator on various curved objects. Finally,
Section 5 summarizes the present work.
2. Design of PVC Gel Vibrotactile Actuator
To fabricate a wave-shaped polyvinyl chloride (PVC) gel (PVC gel), we prepared purified PVC powder, acetyl tributyl citrate (ATBC) plasticizer, and tetrahydrofuran (THF). The purified PVC powder and the ATBC plasticizer were dissolved in the THF solution during 4 h to incorporate the ATBC plasticizer completely into the PVC. The uniformly mixed PVC/ATBC solution was poured into a Teflon dish that was carved into a wave-shaped form. After sufficiently evaporating the THF in the PVC/ATBC solution at room temperature for 72 h, a wave-shaped PVC gel was obtained.
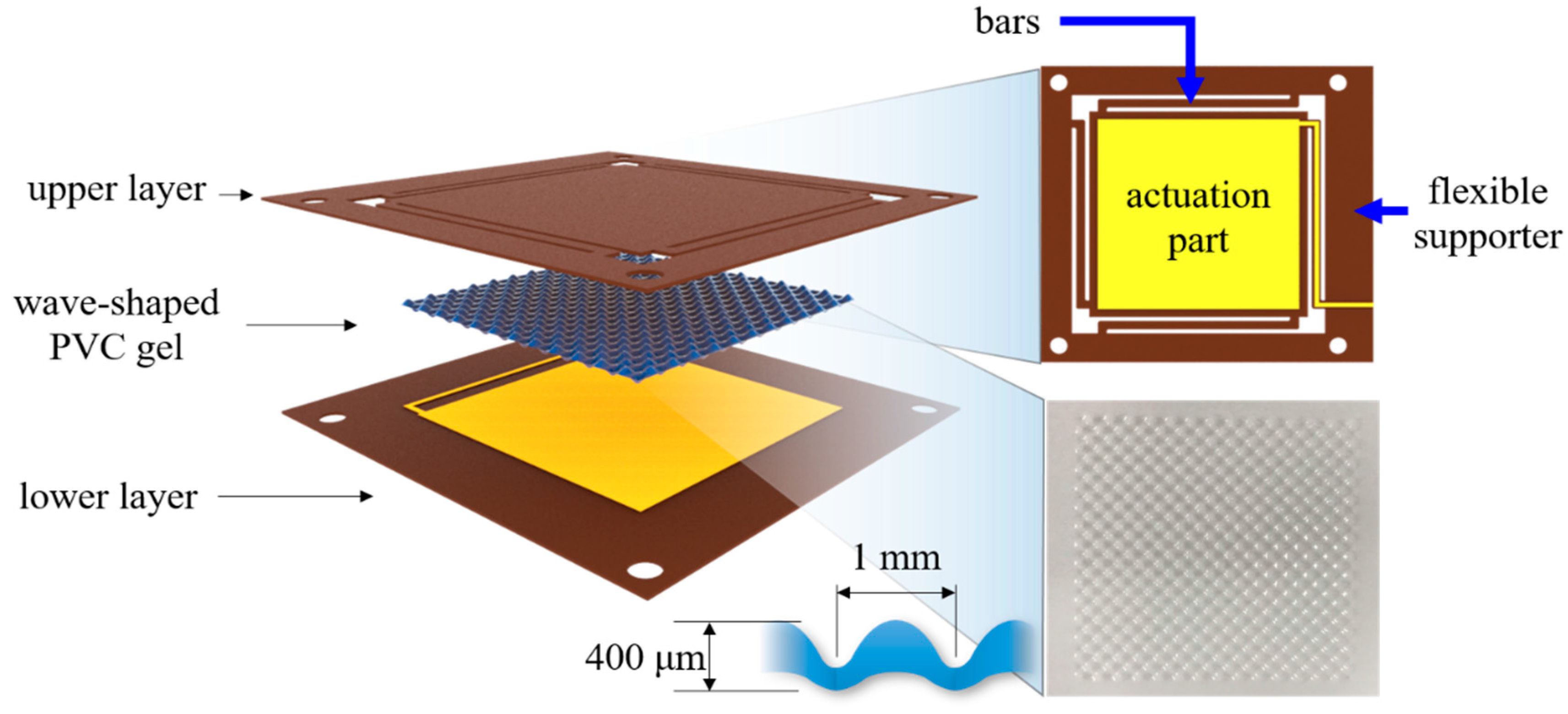
Figure 1 shows the fabrication process of the wave-shaped PVC gel. Using the obtained wave-shaped PVC gel, a soft vibrotactile actuator was presented as shown in
Figure 2. The actuator was composed of an upper layer, a wave-shaped PVC gel layer, and a lower layer. The upper layer was composed of an actuation part, bars, and a flexible supporter. The thickness of the wave-shaped PVC gel was 400 μm, and the width of the wave was 1 mm.
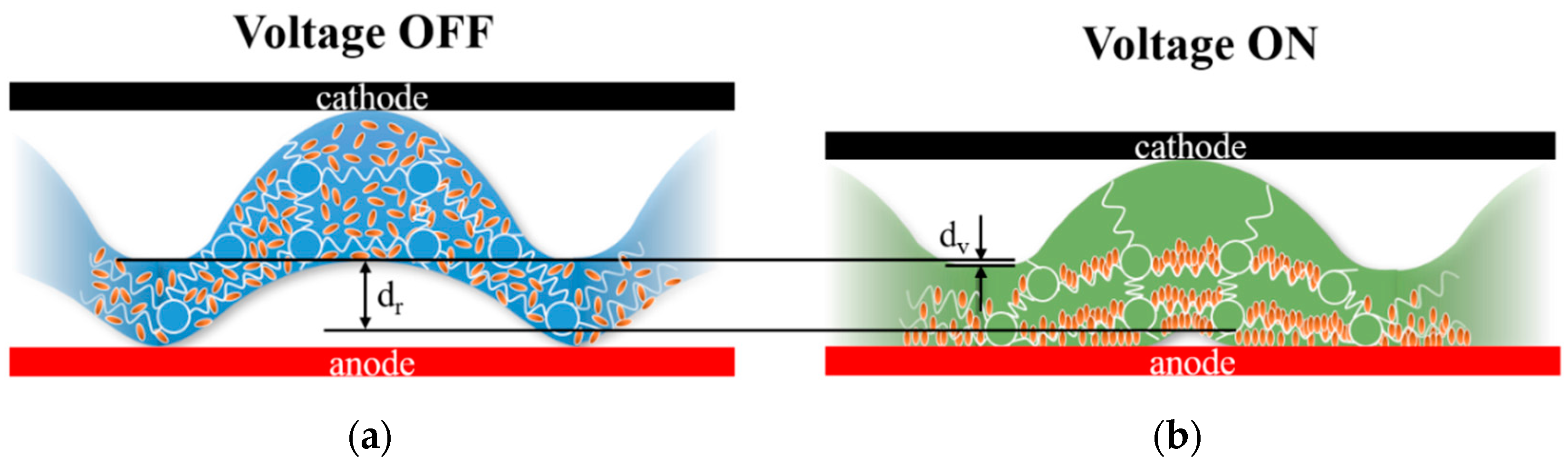
The behavior of the PVC gel under voltage input is different from the conventional non-ionic EAPs. When voltage input is applied to the PVC gel, the PVC gel deforms toward an anode by moving the dipoles with PVC chains as shown in
Figure 3. Detailed information about the mechanism of the PVC gel can be found in our previous work [
15]. In the previous work, a wave shape of the PVC gel was considered for maximizing the elastic restoring force because the elastic restoring force is proportional to the displacement. There is considerable deformation in the ridges of the wave-shaped PVC gel, whereas there is little deformation in the valleys as we can see in
Figure 3. In
Figure 3, d
r, and d
v are displacements of a ridge and a valley, respectively. From the
Figure 3, most input energy applied to the valleys at the wave-shaped PVC gel scarcely affected to the operation of the wave-shaped PVC gel. To overcome the limitation of our previous work, we designed a new structure for concentrating most of electric energy on the actuation.
3. A New Design of an Improved Soft Thin-Film Vibrotactile Actuator
As we mentioned above, the conventional PVC gel based vibrotactile actuator did not fully reflect the characteristics of the wave-shaped PVC gel. In this section, we present a new improved soft vibrotactile actuator that reflects the characteristics of the wave-shaped PVC gel.
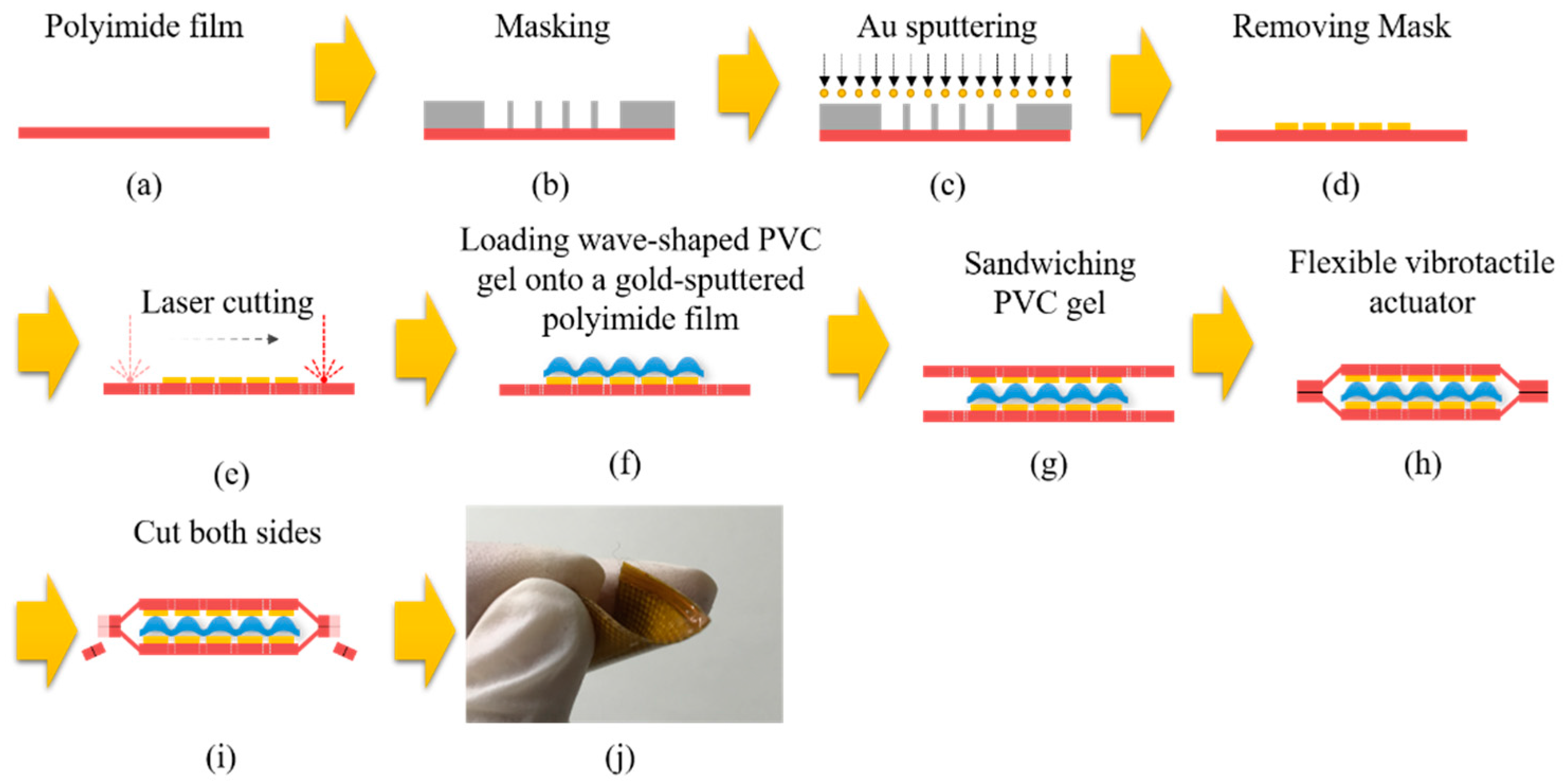
Figure 4 shows the fabrication process of the improved soft vibrotactile actuator based on PVC gel. First, we prepared a flexible polyimide film (Kepton) having 20 mm (H) × 50 mm (W) × 200 μm (T), which has heat-resisting and insulating properties, flexibility, and high durability [
18]. After that, we prepared an aluminum mask for sputtering electrodes onto the polyimide film. This aluminum mask, whose size is 20 (H) × 50 (W) × 1 mm (T), has 20 × 20-arrayed rectangular holes in order to position all rectangular holes in the center of the corresponding ridges of the wave-shaped PVC gel. The fabricated aluminum mask was loaded onto the polyimide film, and then a 100 nm gold was sputtered onto the polyimide film and the mask. By removing the mask, the patterned electrode can be applied onto the polyimide film. We then carried out a laser cutting process for fabricating plate springs at both ends of the polyimide film (
Figure 4e). These two plate springs were considered for helping the restoration of the actuator when the applied input voltage was removed. We named the polyimide with electrodes in
Figure 4e a gold-sputtered polyimide film. A wave-shaped PVC gel was loaded onto the fabricated gold-sputtered polyimide film. Next, the wave-shaped PVC gel was covered by another gold-sputtered polyimide film as shown in
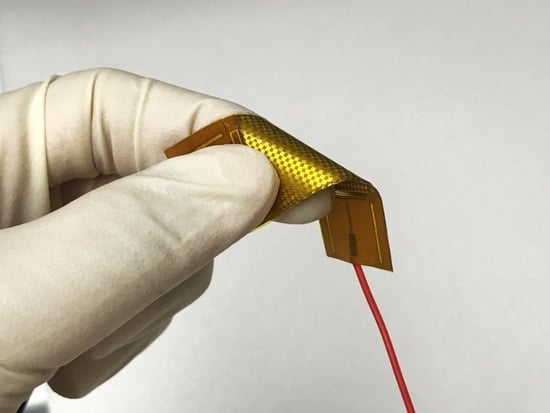
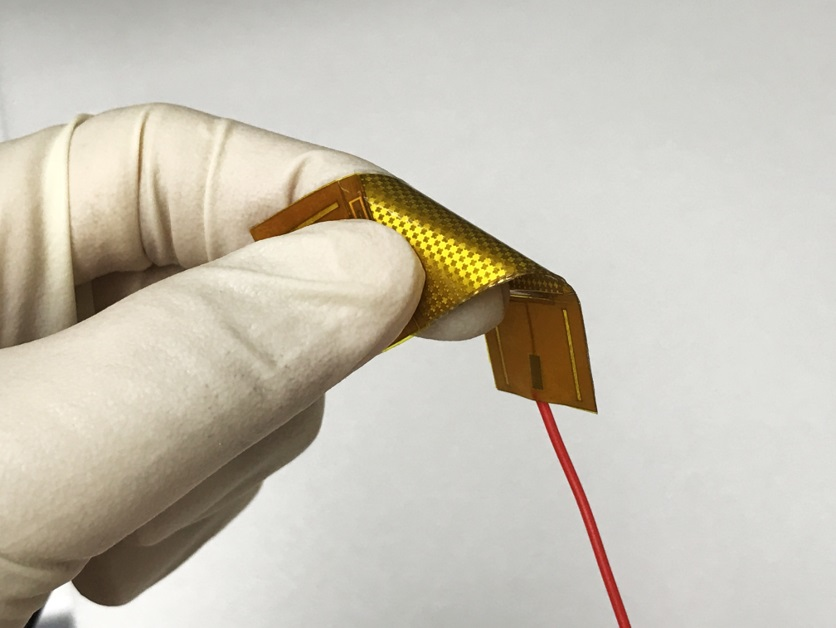
Figure 4g. By joining two gold-sputtered polyimide films, we finally obtained a soft vibrotactile actuator (
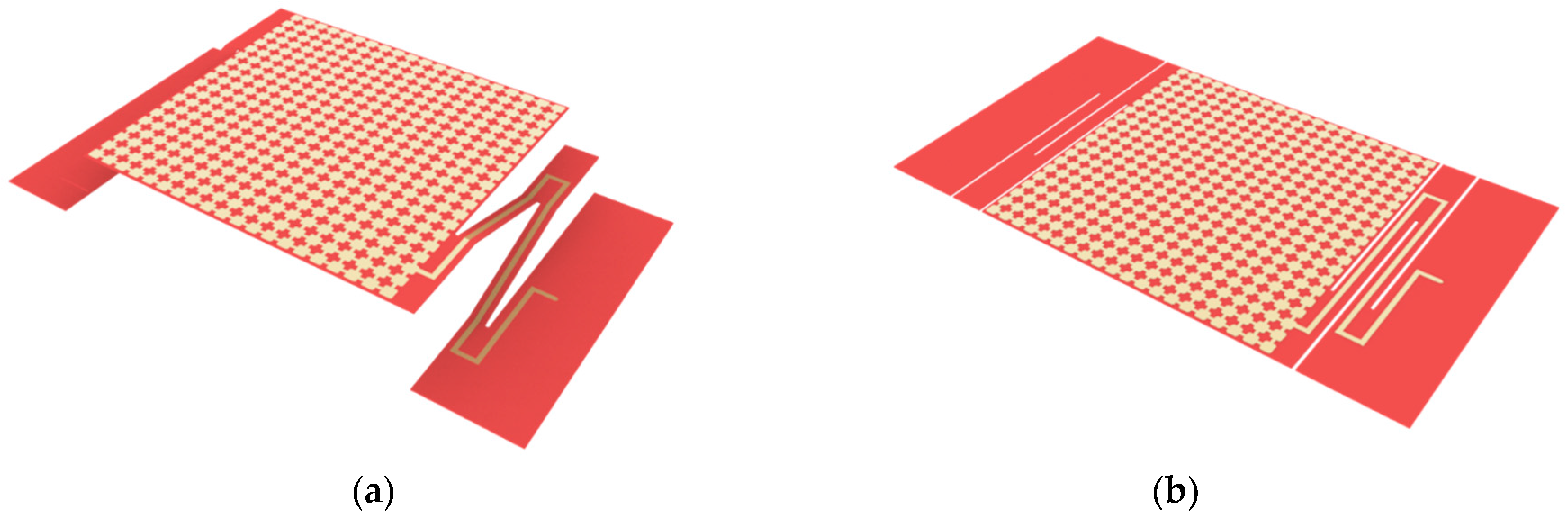
Figure 4h,i). According to the laser cutting process, the actuation part can easily move in an up and down direction with voltage inputs (
Figure 5a,b). Due to this structure, the electric energy could be focused onto the ridges of the wave-shaped PVC gel.
4. Experiments and Results
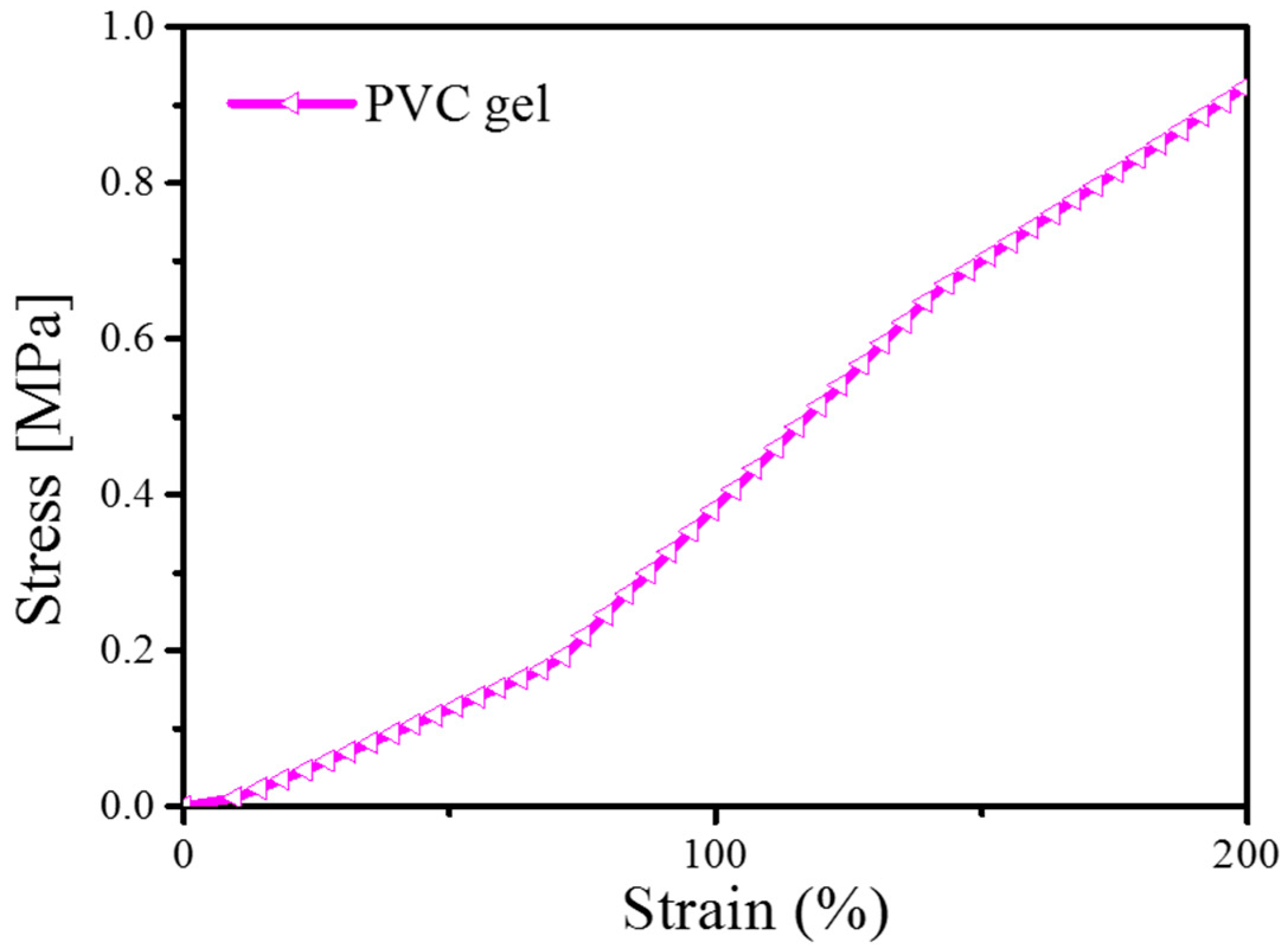
The stiffness of the PVC gel is an important factor in the proposed actuator. Hence, we investigated the stress–strain behavior which is associated with the stiffness of the PVC gel. To investigate the stress–strain relationship of the PVC gel, uniaxial tensile tests of the PVC gel was carried out using dumbbell-shaped specimen, which was cut out from a flat drop-cast film. The test was conducted using a universal testing machine (UTM, H5KT, Tinius Olsen, PA, USA) according to ASTM D638 type V with a crosshead speed of 50 mm/min at room temperature.
Figure 6 shows the stress–strain relationship of the PVC gel. We can see that the stress increases as the strain increases.
We prepared two soft PVC gel based vibrotactile actuators (one is the proposed actuator and the other is the previously developed actuator), and we also prepared the other soft actuators based on polyurethane [
19] and cellulose acetate [
20] in order to investigate their haptic behaviors and to compare them. The prepared four actuators have the same size but have different structure.
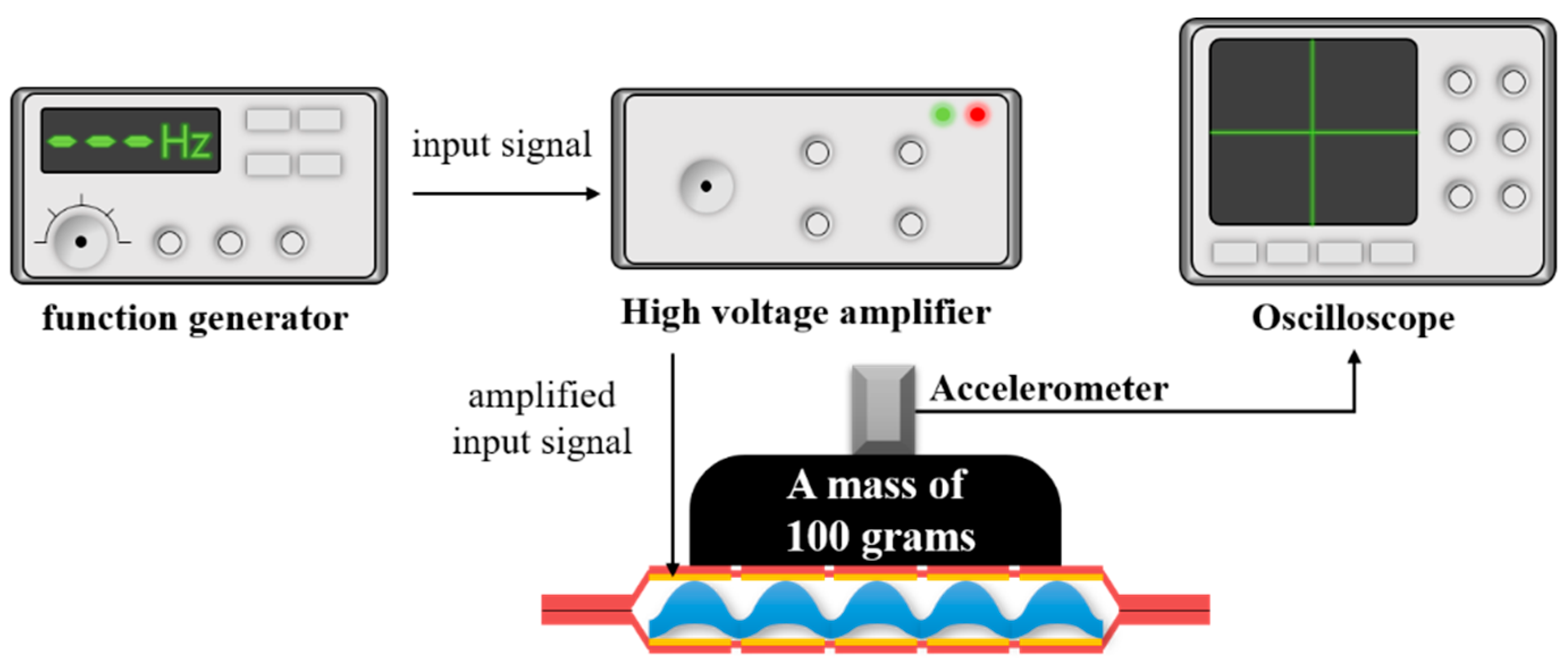
Figure 7 shows the experimental environment consisting of a function generator (Protek 9305, Protek, Incheon, Korea), an accelerometer (Charge Accelerometer type 4393, Bruel & Kjaer, Nærum, Denmark), a high voltage amplifier (Trek 10/40A-HS, TREK, New York, NY, USA), and an oscilloscope (MSO/DPO 2000, Tektronix, Oregon, OR, USA). A mass of 100 g was attached on each prepared vibrotactile actuator. A function generator, which creates 0 to 1 V
pp square AC input voltage, was connected to a high voltage amplifier (having a gain of 1000) and the amplified voltage was applied to each vibrotactile actuator. An accelerometer was put on the mass of 100 g for measuring vibration force. The measured acceleration was displayed on an oscilloscope. In this experiment, the vibration force was obtained as a function of input frequency in a range of 0 Hz to 300 Hz.
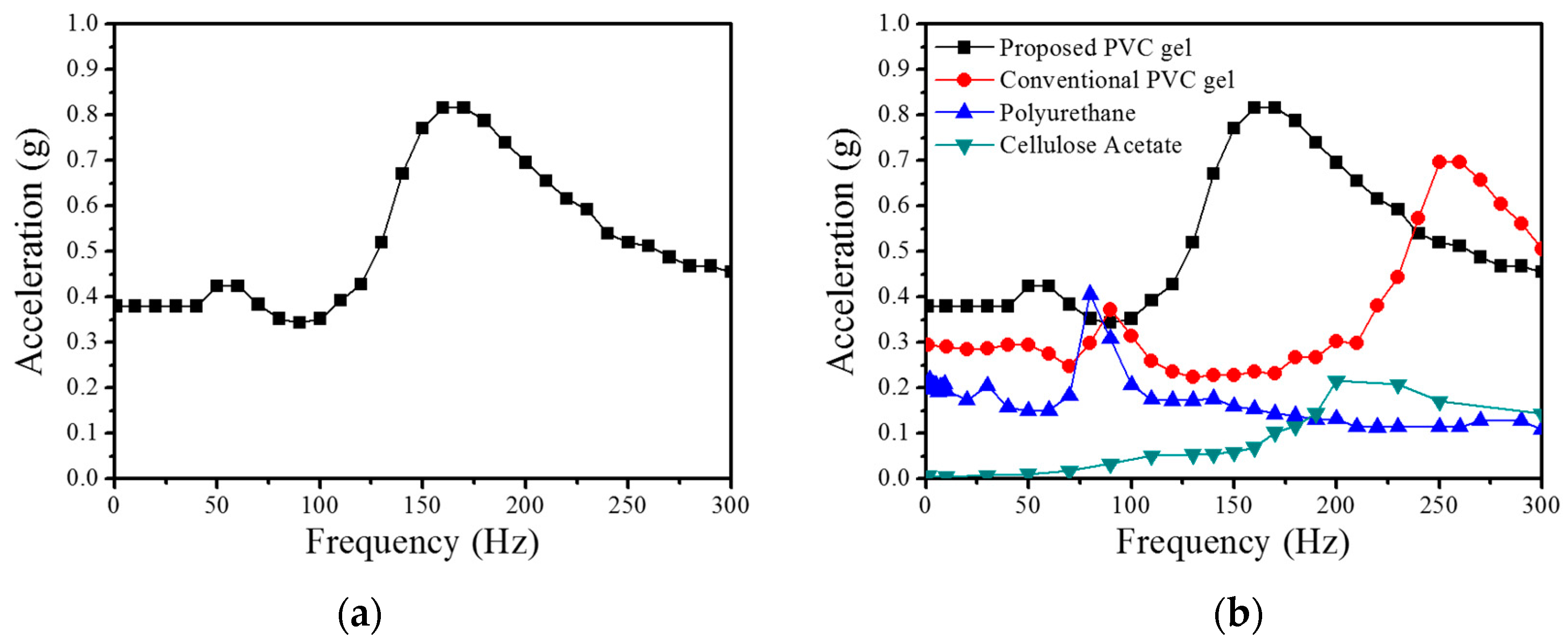
We compared the proposed actuator and three other soft vibrotactile actuators.
Figure 8 shows the haptic results of four soft vibrotactile actuators as a function of the input frequency.
Figure 8a shows the result of the proposed actuator with new design. We plotted the haptic results of the proposed vibrotactile actuator and the other vibrotactile actuators (the conventional design, cellulose acetate based actuator, and polyurethane based actuator) for easy comparison in
Figure 8b. It can be seen that the vibration amplitude of the proposed vibrotactile actuator is higher than the other vibrotactile actuators in the wide frequency range. In particular, the vibration amplitude of the proposed actuator at the resonant frequency increased to about 0.816 g (g = 9.8 m/s
2). Due to the design for concentrating most of electric energy on the ridges of the PVC gel, we can increase the vibration amplitude of the proposed actuator.
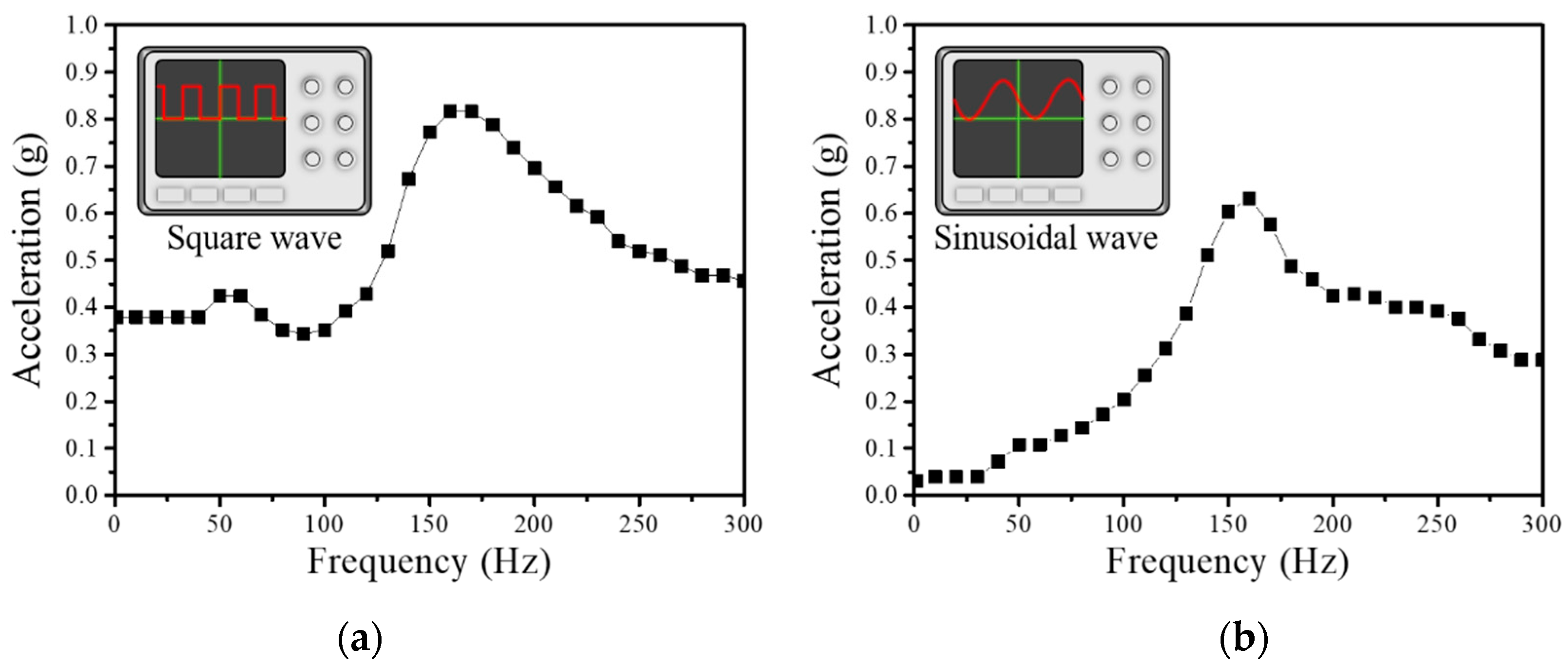
The applied input voltage waveform affects the haptic behavior of vibrotactile actuators. So, we conducted another experiment to investigate the haptic behaviors of the proposed vibrotactile actuator according to the input waveforms. In this experiment, we applied two input voltage waveforms (one is square wave and the other one is sinusoidal wave) to the proposed actuator and measured the output acceleration behaviors. The same experimental environment as
Figure 7 was used for this experiment.
Figure 9a,b show the results when the proposed actuator was operated by the square wave input and the sinusoidal input, respectively. The measured resonant frequencies are almost the same (about 160 Hz), whereas the measured resonant peaks are different from each other (0.816 g for square wave and 0.632 g for sinusoidal wave). The vibration amplitude under the square wave input is bigger than the sinusoidal input in an entire frequency range (0 to 300 Hz).
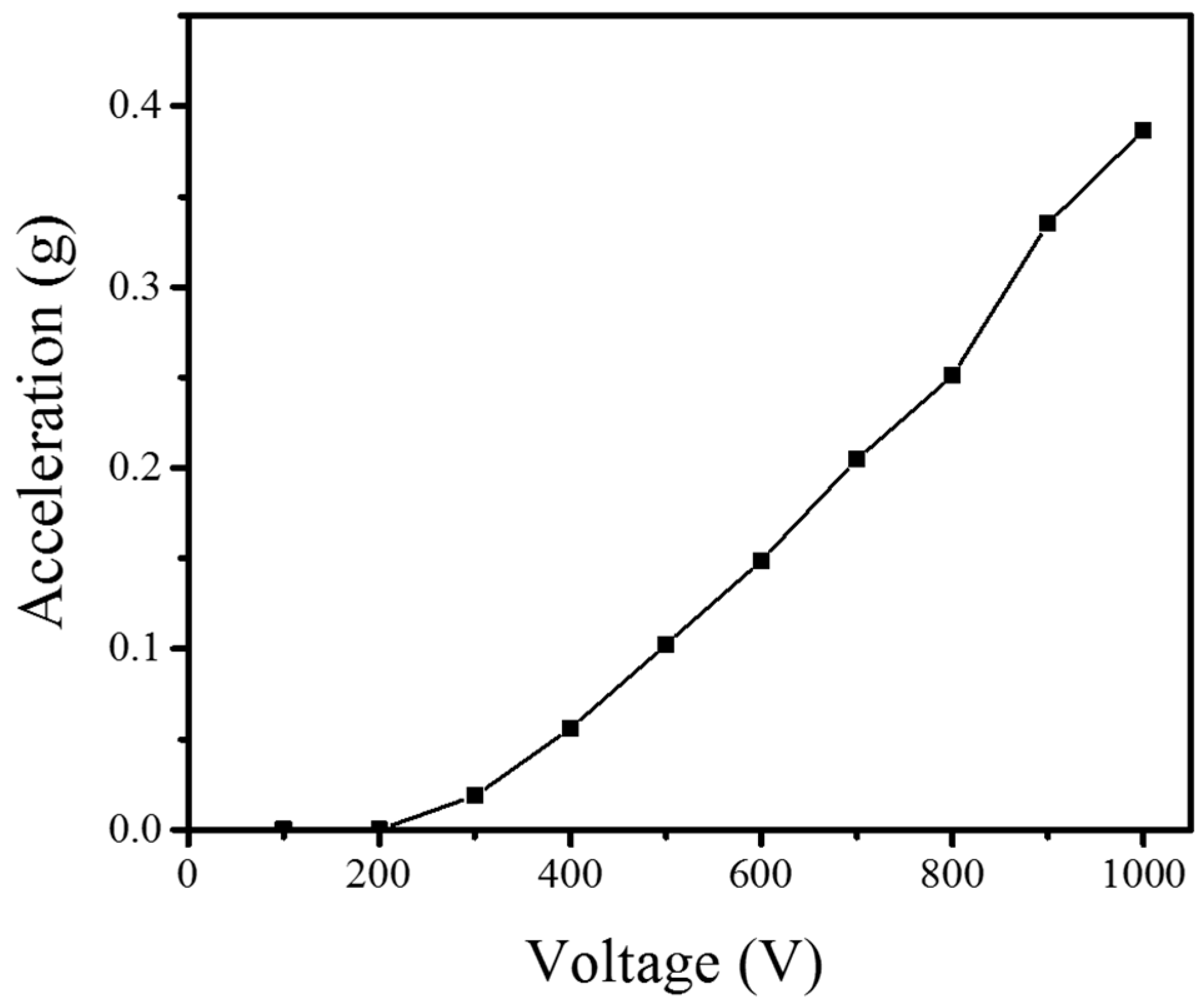
The relationship between output acceleration and input voltage is an important factor. So, we measured output acceleration as a function of input voltage. The same experimental environment (
Figure 7) consisting of a function generator, an accelerometer, a high voltage amplifier, and an oscilloscope was used for measuring the force–voltage relationship of the proposed actuator. The applied voltage was altered in the range of 0 V to 1000 V at 100 V intervals and the input frequency was fixed at 1 Hz. The output force increases monotonically with the amplitude of voltage input.
Figure 10 shows that the measured output force was increased from 0 g (0 V) to 0.416 g (1000 V) for the input with a frequency of 1 Hz.
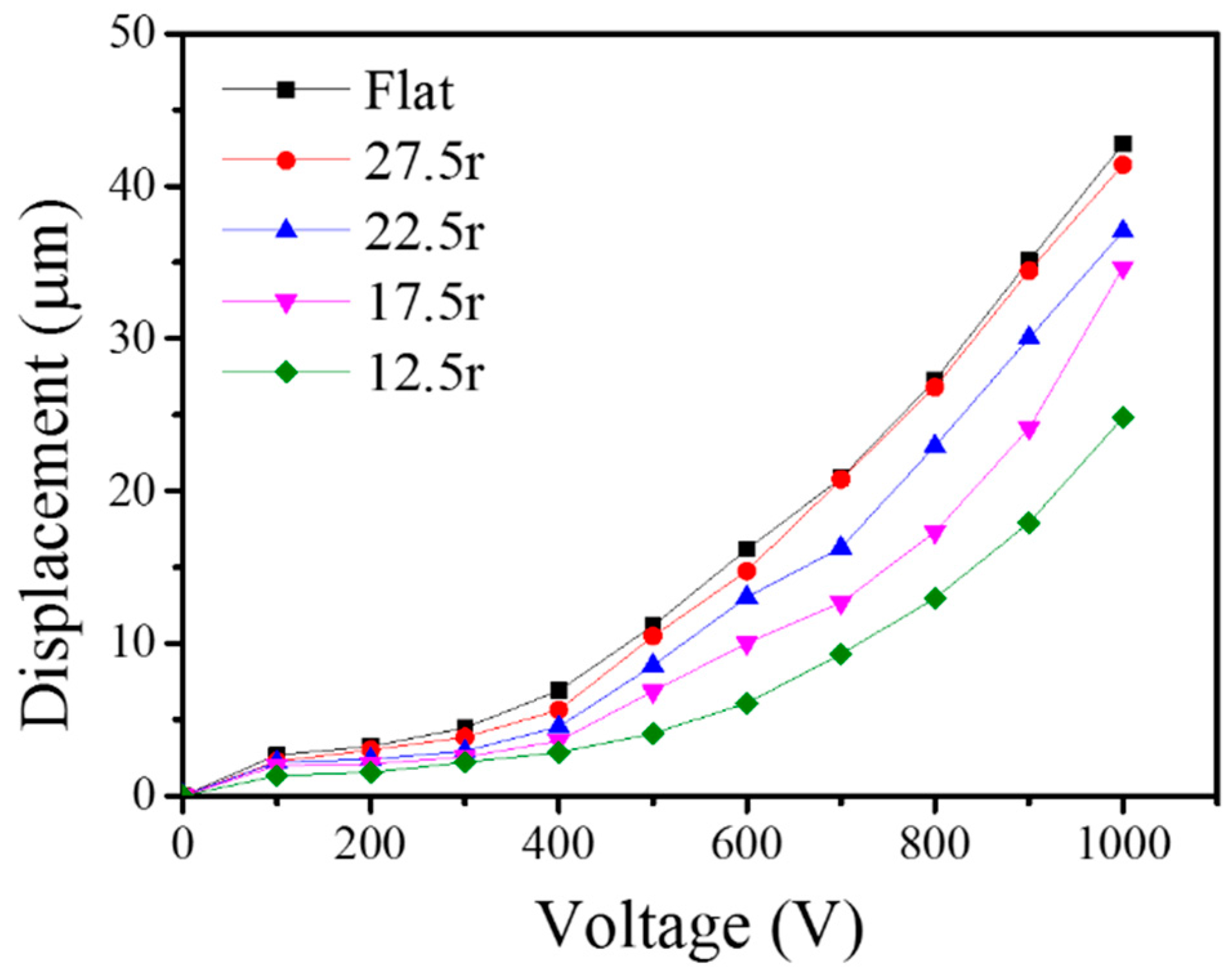
In order to show that the proposed actuator can be operated under bending condition, we measured the displacement using a laser displacement sensor (Keyence LK-G15, Nevada, NV, USA), and data was gathered by using a signal conditioner (Bruel & Kjaer Pulse analyzer, Bruel & Kjaer, Nærum, Denmark) with a PC. During measurements, an AC voltage of square wave was applied to the actuator by a function generator (Agilent 33220A, Agilent Technologies, Folsom, California, CA, USA) that was connected to a high voltage power amplifier (Trek 10/40A-HS, TREK, New York, NY, USA). We prepared four bending samples and one flat sample. The bending radius of the prepared bending samples were adjusted to 27.5, 22.5, 17.5, and 12.5 mm, which were denoted as 27.5, 22.5, 17.5, and 12.5 r, respectively.
Figure 11 is the results of the prepared samples’ displacements according to the bending radius. The displacement gradually decreased with decreasing bending radius. The measured displacement decreased from 42.75 μm (Flat) to 41.4 μm (27.5 r) for the input with voltage 1000 V. It also decreased from 41.4 μm to 24.81 μm with decreasing bending radius from 27.5 r to 12.5 r.
The perceptual strength of vibration that users feel may be lower with our soft actuator than other heavier actuators when providing vibrations of the same amplitude. Furthermore, the contact area of our actuator on the skin varies during stimulation due to the membrane’s flexibility, whereas other solid contactors maintain the same contact area. For these reasons, we conducted the same perceptual experiment as [
19] to evaluate the range of perceived vibrotactile intensity that our soft actuator can provide in comparison to a traditional rigid actuator in a perceptual experiment. In this experiment, two vibrotactile actuators were used. One actuator was the proposed actuator (for reference stimulus), and the other actuator used to create comparison stimuli was a mechanical mini-shaker (model 4810, Bruel & Kjaer, Nærum, Denmark); dynamic mass 18 g) with an amplifier (model 2709, Bruel & Kjaer, Nærum, Denmark). The vibratory stimulus (with sinusoidal waveform), which is one of four frequencies (80, 120, 160, and 200 Hz), was randomly selected and was conveyed to subjects. For each frequency, we provided the reference stimulus to users using our soft actuator with the maximum amplitude (1 kV
p-p) in a sinusoidal waveform. Sinusoidal comparison stimuli were provided by the mini-shaker at the same frequency, but with varying amplitudes. The one-up, one-down interleaved adaptive staircase procedure [
21] was used to measure the point of subjective equality (PSE) of comparison stimuli. Each stimulus was presented for 1 s. Each upward and downward staircase was terminated when five respective response reversals were encountered. Ten subjects (seven males and three females) without any sensory loss or dysesthesia were participated in this experiment. All of them were between 22 and 31 years old with a mean of 26.5. The subjects signed a standard consent form after being explained the experimental method and purpose. For more information on this experiment’s environment, refer to previous research [
19].
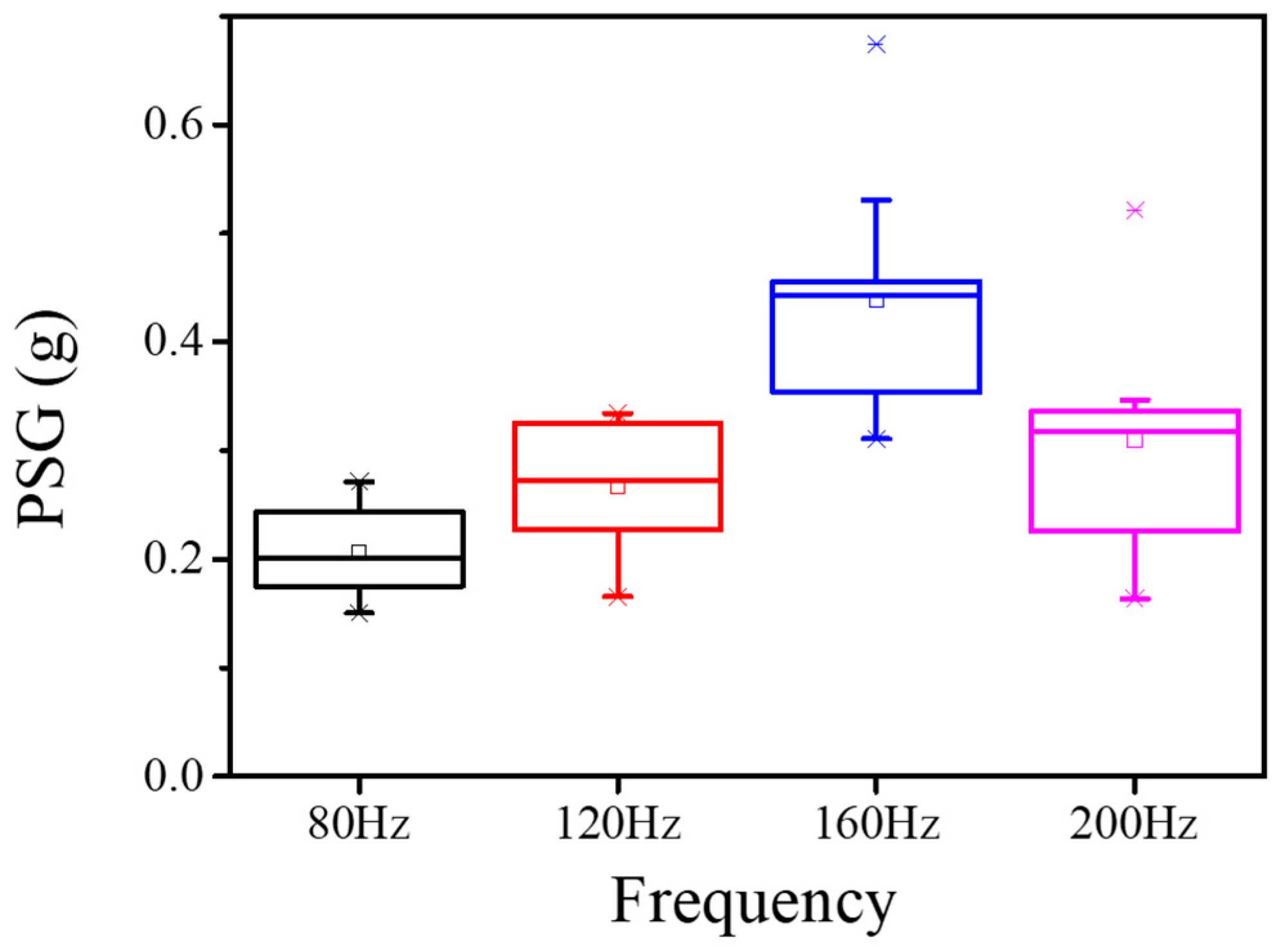
Before conducting the main test, we measured the contact force of the subjects using a force sensor (Nano 17, ATI Technologies, Riverside, California, CA, USA). The measured force ranged from 0.12 N to 0.3 N with a mean of 0.22 N and all subjects could clearly perceive stimuli created by both actuators with their contact force. We depicted the measured mean of the PSE using a box plot (
Figure 12). The mean PSEs were 0.206 g for 80 Hz, 0.267 g for 120 Hz, 0.439 g for 160 Hz, and 0.309 g for 200 Hz, respectively. The mean PSEs were relatively lower than the vibrational amplitude of the proposed actuator (
Figure 7). The results mean that the maximum amplitude vibrations produced by our soft actuator were perceived as strong as the vibrations of amplitude 0.2–0.44 g generated by the shaker that had dynamic mass of 18.4 g. Such vibrations are a maximum of 1.4-times stronger than the vibration from [
19] and they are sufficient for clear perception. For example, the vibrotactile signal for virtual button clicks that participants regarded as the most realistic out of 36 stimuli had an amplitude of approximately 0.2 g (rendered by a linear resonant actuator at its resonance frequency of 178 Hz through a mobile phone that weighed 73.7 g) [
22].



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}











