State of the Art: Bipedal Robots for Lower Limb Rehabilitation


Abstract
:1. Introduction
2. Bipedal Locomotion
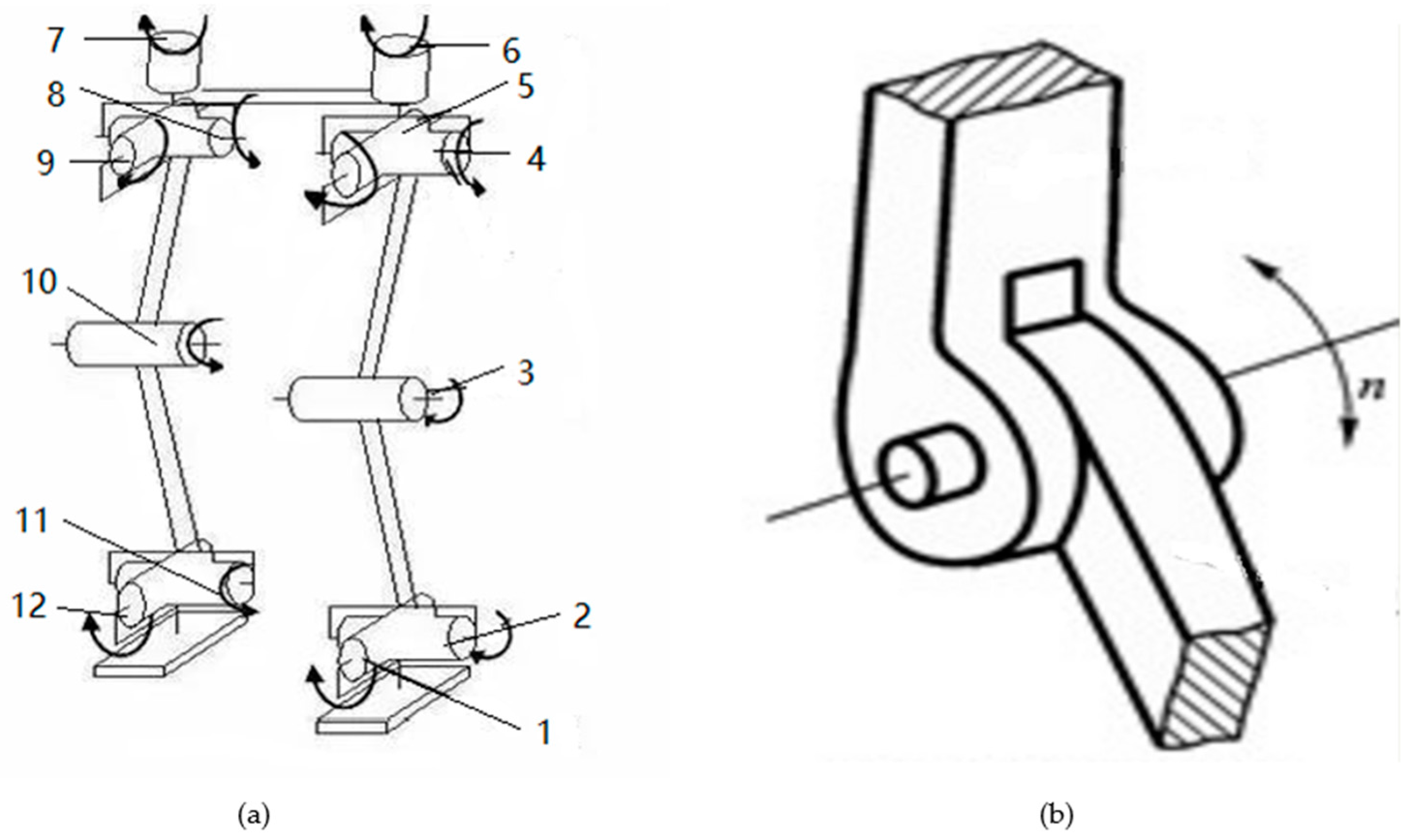
2.1. Hardware and Structure
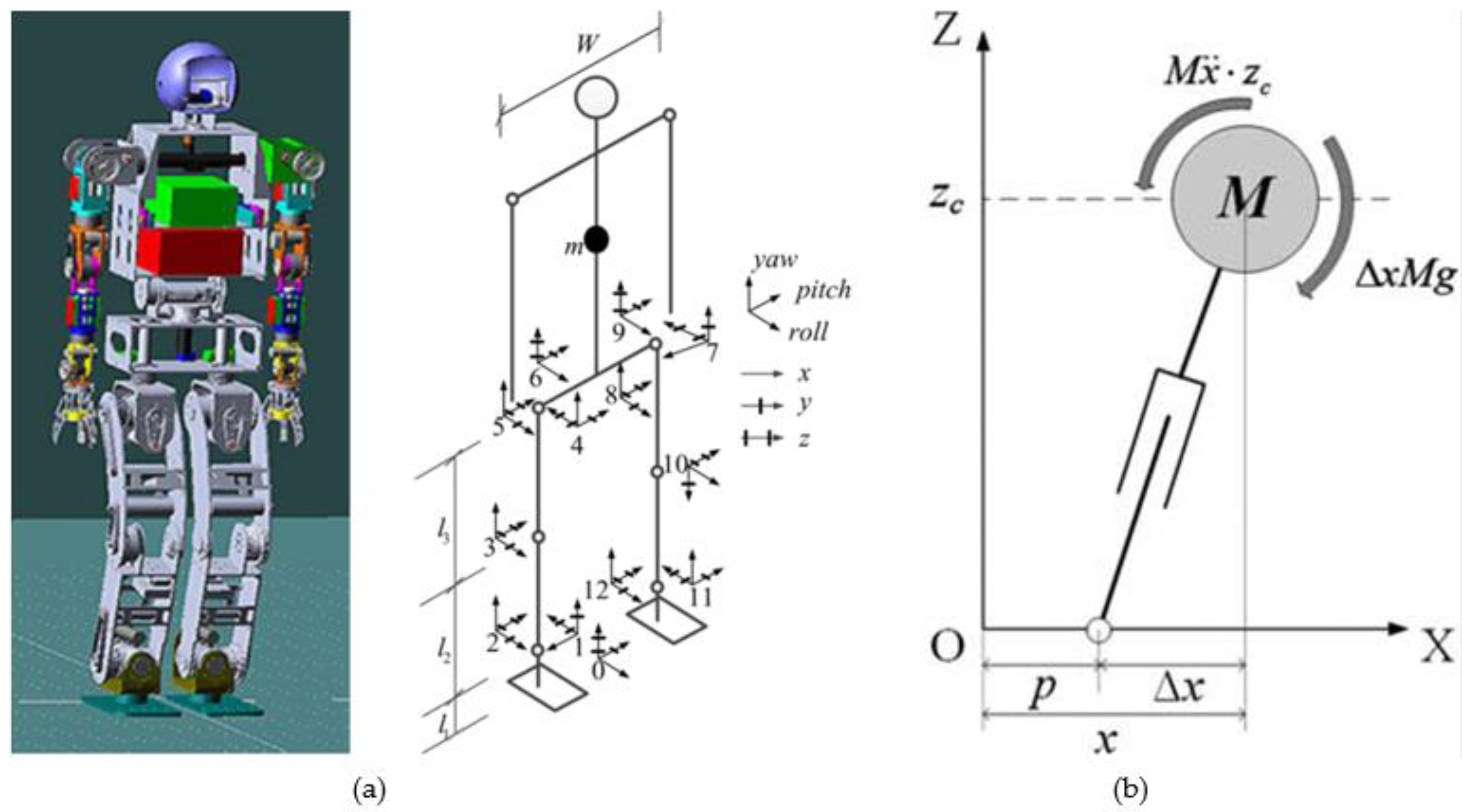
2.2. Stability Control
2.3. Motion Planning
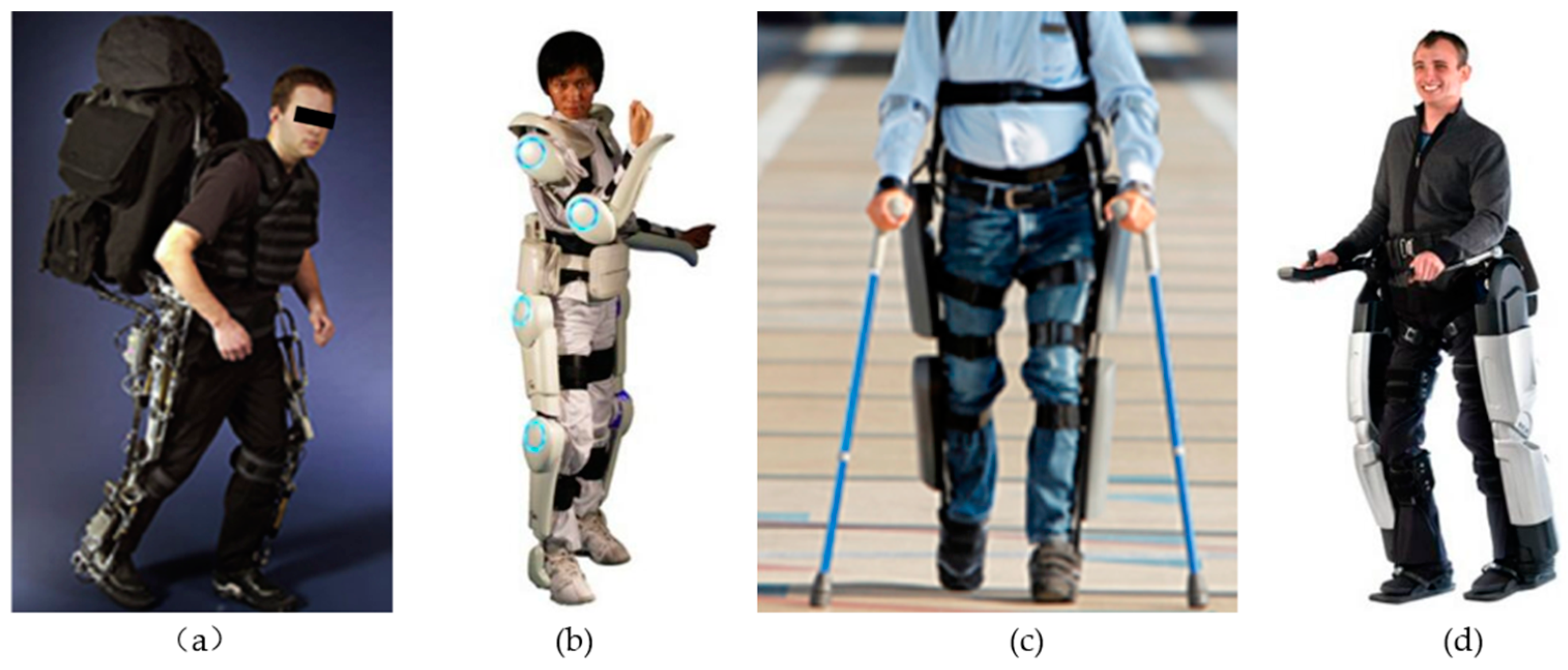
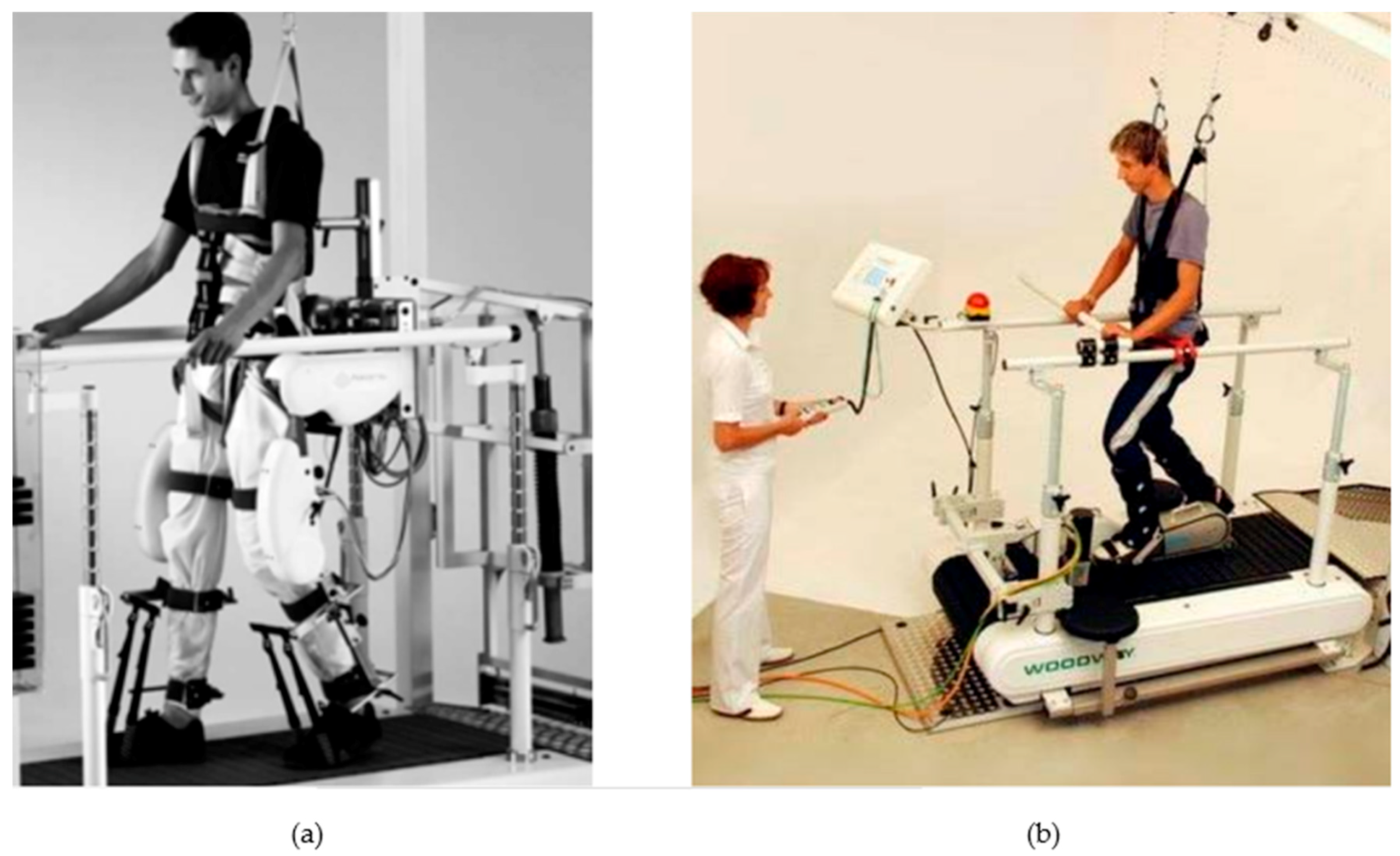
3. Rehabilitation Application
4. Challenges and Outlooks
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Chen, B.; Luo, M.; Guo, F.; Chen, S. Walking mechanism and kinematic analysis of humanoid robot. In Proceedings of the 2013 International Conference on Advanced Mechatronic Systems (ICAMechS), Luoyang, China, 25–27 September 2013; pp. 491–494. [Google Scholar]
- Vukobratović, M.; Branislav, B. Zero-moment point—Thirty five years of its life. Int. J. Humanoid Robot. 2004, 1, 157–173. [Google Scholar] [CrossRef]
- Akhtaruzzaman, M.; Shafie, A.A. Evolution of humanoid robot and contribution of various countries in advancing the research and development of the platform. In Proceedings of the 2010 International Conference on Control Automation and Systems (ICCAS), Gyeonggi-do, Korea, 27–30 October 2010; pp. 1021–1028. [Google Scholar]
- Takanishi, A. Quasi dynamic walking of the biped walking robot. J. Robot. Soc. Jpn. 1983, 1, 196–203. [Google Scholar] [CrossRef]
- Lim, H.-O.; Atsuo, T. Biped walking robots created at Waseda University: WL and WABIAN family. Philos. Trans. R. Soc. Lond. A 2007, 365, 49–64. [Google Scholar] [CrossRef] [PubMed]
- Lim, P.; Al Kushi, A.; Gilks, B.; Wong, F.; Aquino-Parsons, C. Early stage uterine papillary serous carcinoma of the endometrium. Cancer 2001, 91, 752–757. [Google Scholar] [CrossRef]
- Kato, T.; Takanishi, A.; Jishikawa, H.; Kato, I. The realization of the quasi-dynamic walking by the biped walking machine. In Proceedings of the Fourth Symposium on Theory and Practice of Robots and Manipulators, Zaborów, Poland, 8–12 September 1981. [Google Scholar]
- Takanishi, A.; Naito, G.; Ishida, M.; Kato, I. Realization of plane walking by the biped walking robot WL-10R. In Theory and Practice of Robots and Manipulators; Springer: Colfax County, MX, USA, 1985; pp. 383–393. [Google Scholar]
- Kajita, S.; Kanehiro, F.; Kaneko, K.; Fujiwara, K.; Yokoi, K.; Hirukawa, H. A realtime pattern generator for biped walking. In Proceedings of the IEEE International Conference on Robotics and Automation, Washington, DC, USA, 11–15 May 2002; Volume 1, pp. 31–37. [Google Scholar]
- Zheng, Y.F.; Shen, J. Gait synthesis for the SD-2 biped robot to climb sloping surface. IEEE Trans. Robot. Autom. 1990, 6, 86–96. [Google Scholar] [CrossRef]
- Espiau, B.; Sardain, P. The anthropomorphic biped robot BIP2000. In Proceedings of the IEEE International Conference on Robotics and Automation, San Francisco, CA, USA, 24–28 April 2000; Volume 4, pp. 3996–4001. [Google Scholar]
- Hirai, K.; Hirose, M.; Haikawa, Y.; Takenaka, T. The development of Honda humanoid robot. In Proceedings of the IEEE International Conference on Robotics and Automation, Leuven, Belgium, 16–20 May 1998; Volume 2, pp. 1321–1326. [Google Scholar]
- Pratt, J.E.; Pratt, G.A. Exploiting natural dynamics in the control of a planar bipedal walking robot. In Proceedings of the Annual Allerton Conference on Communication Control and Computing, Monticello, IL, USA, 23–25 September 1998; Volume 36, pp. 739–748. [Google Scholar]
- Sakagami, Y.; Watanabe, R.; Aoyama, C.; Matsunaga, S.; Higaki, N.; Fujimura, K. The intelligent ASIMO: System overview and integration. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Lausanne, Switzerland, 30 September–4 October 2002; Volume 3. [Google Scholar]
- Kuroki, Y.; Fujita, M.; Ishida, T.; Nagasaka, K.I.; Yamaguchi, J.I. A small biped entertainment robot exploring attractive applications. In Proceedings of the IEEE International Conference on Robotics and Automation, Taipei, Taiwan, 14–19 September 2003; Volume 1, pp. 471–476. [Google Scholar]
- Huang, Q.; Li, K.; Wang, T. Control and mechanical design of humanoid robot BHR-01. In Proceedings of the 3rd IARP International Workshop on Humanoid and Human Friendly Robotics, Tsukuba, Japan, 11–12 December 2002; pp. 10–13. [Google Scholar]
- Akachi, K.; Kaneko, K.; Kanehira, N.; Ota, S.; Miyamori, G.; Hirata, M.; Kanehiro, F. Development of humanoid robot HRP-3P. In Proceedings of the 5th IEEE-RAS International Conference on Humanoid Robots, Tsukuba, Japan, 5–7 December 2005; pp. 50–55. [Google Scholar]
- Park, I.W.; Kim, J.Y.; Lee, J.; Oh, J.H. Online free walking trajectory generation for biped humanoid robot KHR-3 (HUBO). In Proceedings of the IEEE International Conference on Robotics and Automation, Orlando, FL, USA, 15–19 May 2006; pp. 1231–1236. [Google Scholar]
- Lohmeier, S.; Buschmann, T.; Ulbrich, H. Humanoid robot LOLA. In Proceedings of the IEEE International Conference on Robotics and Automation, Kobe, Japan, 12–17 May 2009; pp. 775–780. [Google Scholar]
- Kaneko, K.; Kanehiro, F.; Morisawa, M.; Miura, K.; Nakaoka, S.I.; Kajita, S. Cybernetic human HRP-4C. In Proceedings of the 9th IEEE-RAS International Conference on Humanoid Robots, Paris, France, 7–10 December 2009; pp. 7–14. [Google Scholar]
- Kaneko, K.; Kanehiro, F.; Morisawa, M.; Akachi, K.; Miyamori, G.; Hayashi, A.; Kanehira, N. Humanoid robot hrp-4-humanoid robotics platform with lightweight and slim body. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), San Francisco, CA, USA, 25–30 September 2011. [Google Scholar]
- Henze, B.; Werner, A.; Roa, M.A.; Garofalo, G.; Englsberger, J.; Ott, C. Control applications of TORO—A torque controlled humanoid robot. In Proceedings of the 14th IEEE-RAS International Conference on Humanoid Robots (Humanoids), Madrid, Spain, 18–20 November 2014; p. 841. [Google Scholar]
- Edwards, L. PETMAN Robot to Closely Simulate Soldiers; Technical Report; PhysOrg: Douglas, UK, 2010. [Google Scholar]
- Sadedel, M.; Yousefi-koma, A.; Khadiv, M. Offline path planning, dynamic modeling and gait optimization of a 2D humanoid robot. In Proceedings of the Second RSI/ISM International Conference on Robotics and Mechatronics (ICRoM), Tehran, Iran, 15–17 October 2014; pp. 131–136. [Google Scholar]
- De Santis, A.; Siciliano, B.; De Luca, A.; Bicchi, A. An atlas of physical human–robot interaction. Mech. Mach. Theory 2008, 43, 253–270. [Google Scholar] [CrossRef]
- Azevedo, C. Control architecture and algorithms of the anthropomorphic biped robot BIP2000. In Proceedings of the International Conference on Climbing and Walking Robots, Madrid, Spain, 2–4 October 2000. [Google Scholar]
- Pratt, J.; Chew, C.M.; Torres, A.; Dilworth, P.; Pratt, G. Virtual model control: An intuitive approach for bipedal locomotion. Int. J. Robot. Res. 2001, 20, 129–143. [Google Scholar] [CrossRef]
- Chestnutt, J.; Lau, M.; Cheung, G.; Kuffner, J.; Hodgins, J.; Kanade, T. Footstep planning for the honda asimo humanoid. In Proceedings of the 2005 IEEE International Conference on Robotics and Automation, Barcelona, Spain, 18–22 April 2005; pp. 629–634. [Google Scholar]
- Kuroki, Y. A small biped entertainment robot. In Proceedings of the 2001 International Symposium on Micromechatronics and Human Science, Nagoya, Japan, 9–12 September 2001; pp. 3–4. [Google Scholar]
- Zhang, L.; Huang, Q.; Lu, Y.; Xiao, T.; Yang, J.; Keerio, M. A visual tele-operation system for the humanoid robot bhr-02. In Proceedings of the International Conference on Intelligent Robots and Systems, Beijing, China, 9–15 October 2006; pp. 1110–1114. [Google Scholar]
- Fujita, M.; Kuroki, Y.; Ishida, T.; Doi, T.T. A small humanoid robot sdr-4x for entertainment applications. In Proceedings of the International Conference on Advanced Intelligent Mechatronics, Kobe, Japan, 20–24 July 2003; Volume 2, pp. 938–943. [Google Scholar]
- Kim, J.Y.; Park, I.W.; Lee, J.; Kim, M.S.; Cho, B.K.; Oh, J.H. System design and dynamic walking of humanoid robot KHR-2. In Proceedings of the 2005 IEEE International Conference on Robotics and Automation, Barcelona, Spain, 18–22 April 2005; pp. 1431–1436. [Google Scholar]
- Park, I.W.; Kim, J.Y.; Lee, J.; Oh, J.H. Mechanical design of humanoid robot platform KHR-3 (KAIST humanoid robot 3: HUBO). In Proceedings of the 5th IEEE-RAS International Conference on Humanoid Robots, Tsukuba, Japan, 5–7 December 2005; pp. 321–326. [Google Scholar]
- Shamsuddin, S.; Ismail, L.I.; Yussof, H.; Zahari, N.I.; Bahari, S.; Hashim, H.; Jaffar, A. Humanoid robot NAO: Review of control and motion exploration. In Proceedings of the 2011 IEEE International Conference on Control System, Computing and Engineering (ICCSCE), Penang, Malaysia, 25–27 November 2011; pp. 511–516. [Google Scholar]
- SoftBank Robotics. Available online: https://www.ald.softbankrobotics.com/en/robots/romeo (accessed on 8 September 2017).
- Akhter, A.; Shafie, A.A. Advancement of android and contribution of various countries in the research and development of the humanoid platform. Int. J. Robot. Autom. 2010, 1, 43–57. [Google Scholar]
- Yamaguchi, J.I.; Takanishi, A. Development of a leg part of a humanoid robot—Development of a biped walking robot adapting to the humans' normal living floor. Auton. Robot. 1997, 4, 369–385. [Google Scholar] [CrossRef]
- Azevedo, C.; Poignet, P.; Espiau, B. Artificial locomotion control: From human to robots. Robot. Auton. Syst. 2004, 47, 203–223. [Google Scholar] [CrossRef]
- Kristiina, J.; Wilcock, G. Multimodal open-domain conversations with the Nao robot. In Natural Interaction with Robots, Knowbots and Smartphones; Springer: New York, NY, USA, 2014; pp. 213–224. [Google Scholar]
- Buschmann, T.; Favot, V.; Schwienbacher, M.; Ewald, A.; Ulbrich, H. Dynamics and control of the biped robot lola. In Multibody System Dynamics, Robotics and Control; Springer: Vienna, Austria, 2013; pp. 161–173. [Google Scholar]
- McGeer, T. Passive dynamic walking. Int. J. Robot. Res. 1990, 9, 62–82. [Google Scholar] [CrossRef]
- McGeer, T. Passive walking with knees. In Proceedings of the IEEE International Conference on Robotics and Automation, Detroit, MI, USA, 10–15 May 1990; pp. 1640–1645. [Google Scholar]
- Salatian, A.W.; Zheng, Y.F. Gait synthesis for a biped robot climbing sloping surfaces using neural networks. I. Static learning. In Proceedings of the IEEE International Conference on Robotics and Automation, Nice, France, 12–14 May 1992; pp. 2601–2606. [Google Scholar]
- Zheng, Y.F. A neural gait synthesizer for autonomous biped robots. In Proceedings of the IEEE International Workshop on Intelligent Robots and Systems, Towards a New Frontier of Applications, Ibaraki, Japan, 3–6 July 1990; pp. 601–608. [Google Scholar]
- Pratt, J.; Dilworth, P.; Pratt, G. Virtual model control of a bipedal walking robot. In Proceedings of the IEEE International Conference on Robotics and Automation, Albuquerque, NM, USA, 20–25 April 1997; Volume 1, pp. 193–198. [Google Scholar]
- Kac, E. Telepresence & Bio Art: Networking Humans, Rabbits, & Robots; University of Michigan Press: Ann Arbor, MI, USA, 2005. [Google Scholar]
- Nelson, G.; Saunders, A.; Neville, N.; Swilling, B.; Bondaryk, J.; Billings, D.; Lee, C.; Playter, R.; Raibert, M. Petman: A humanoid robot for testing chemical protective clothing. J. Robot. Soc. Jpn. 2012, 30, 372–377. [Google Scholar] [CrossRef]
- Kim, J.H.; Lattimer, B.Y. Real-time probabilistic classification of fire and smoke using thermal imagery for intelligent firefighting robot. Fire Saf. J. 2015, 72, 40–49. [Google Scholar] [CrossRef]
- Kuindersma, S.; Deits, R.; Fallon, M.; Valenzuela, A.; Dai, H.; Permenter, F.; Koolen, T.; Marion, P.; Tedrake, R. Optimization-based locomotion planning, estimation, and control design for the atlas humanoid robot. Auton. Robots 2016, 40, 429–455. [Google Scholar] [CrossRef]
- Chen, C.Y.; Shih, B.Y.; Shih, C.H.; Wang, L.H. RETRACTED: Design, modeling and stability control for an actuated dynamic walking planar bipedal robot. J. Vib. Control 2013, 19, 376–384. [Google Scholar] [CrossRef]
- Ramezani, A.; Hurst, J.W.; Hamed, K.A.; Grizzle, J.W. Performance analysis and feedback control of ATRIAS, a three-dimensional bipedal robot. J. Dyn. Syst. Meas. Control 2014, 136, 021012. [Google Scholar] [CrossRef]
- Hong, Y.-D.; Kim, J.H. 3-D command state-based modifiable bipedal walking on uneven terrain. IEEE/ASME Trans. Mech. 2013, 18, 657–663. [Google Scholar] [CrossRef]
- Huang, Q.; Yoshihiko, N. Sensory reflex control for humanoid walking. IEEE Trans. Robot. 2005, 21, 977–984. [Google Scholar] [CrossRef]
- Miller, W.T. Real-time neural network control of a biped walking robot. IEEE Control Syst. 1994, 14, 41–48. [Google Scholar] [CrossRef]
- Kuindersma, S.; Deits, R.; Fallon, M.; Valenzuela, A.; Dai, H.; Permenter, F.; Tedrake, R. Optimization-based locomotion planning, estimation, and control design for the atlas humanoid robot. Auton. Robots 2016, 40, 429–455. [Google Scholar] [CrossRef]
- Englsberger, J.; Werner, A.; Ott, C.; Henze, B.; Roa, M.A.; Garofalo, G.; Albu-Schäffer, A. Overview of the torque-controlled humanoid robot TORO. In Proceedings of the 14th IEEE-RAS International Conference on Humanoid Robots (Humanoids), Madrid, Spain, 18–20 November 2014; pp. 916–923. [Google Scholar]
- Shotton, J.; Sharp, T.; Kipman, A.; Fitzgibbon, A.; Finocchio, M.; Blake, A.; Kipman, A.; Moore, R. Real-time human pose recognition in parts from single depth images. Commun. ACM 2013, 56, 116–124. [Google Scholar] [CrossRef]
- Semwal, V.B.; Gora, C.N. Toward developing a computational model for bipedal push recovery—A brief. IEEE Sens. J. 2015, 15, 2021–2022. [Google Scholar] [CrossRef]
- Sardain, P.; Guy, B. Forces acting on a biped robot. Center of pressure-zero moment point. IEEE Trans. Syst. Man Cybern. Part A 2004, 34, 630–637. [Google Scholar] [CrossRef]
- Choi, J.H.; Grizzle, J.W. Planar bipedal walking with foot rotation. In Proceedings of the American Control Conference, Portland, OR, USA, 8–10 June 2005; pp. 4909–4916. [Google Scholar]
- Sakaino, S.; Tomoya, S.; Kouhei, O. Multi-DOF micro-macro bilateral controller using oblique coordinate control. IEEE Trans. Ind. Inf. 2011, 7, 446–454. [Google Scholar] [CrossRef]
- Zhao, Y.; Sentis, L. A three dimensional foot placement planner for locomotion in very rough terrains. In Proceedings of the IEEE-RAS International Conference on Humanoid Robots (Humanoids), Osaka, Japan, 29 November–1 December 2012; pp. 726–733. [Google Scholar]
- Zeng, J.; Chen, H.; Yin, Y.; Yin, Y. A Humanoid Robot Gait Planning and Its Stability Validation. J. Comput. Commun. 2014, 2, 68. [Google Scholar] [CrossRef]
- Ho, Y.F.; Li, T.H.S.; Kuo, P.H.; Ye, Y.T. Parameterized gait pattern generator based on linear inverted pendulum model with natural ZMP references. Knowl. Eng. Rev. 2016, 32, e3. [Google Scholar] [CrossRef]
- Vukobratovic, M.; Manja, K. Kinematics and Trajectory Synthesis of Manipulation Robots; Springer: Berlin, Germany, 2013; Volume 3. [Google Scholar]
- Capi, G.; Nasu, Y.; Barolli, L.; Mitobe, K. Real time gait generation for autonomous humanoid robots: A case study for walking. Robot. Auton. Syst. 2003, 42, 107–116. [Google Scholar] [CrossRef]
- Salatian, A.W.; Yi, K.Y.; Zheng, Y.F. Reinforcement learning for a biped robot to climb sloping surfaces. J. Robot. Syst. 1997, 14, 283–296. [Google Scholar] [CrossRef]
- Shi, H.; Li, X.; Liang, W.; Chen, H.; Wang, S. A novel fuzzy omni-directional gait planning algorithm for biped robot. In Proceedings of the 17th IEEE/ACIS International Conference on Software Engineering, Artificial Intelligence, Networking and Parallel/Distributed Computing (SNPD), Shanghai, China, 30 May–1 June 2016; pp. 71–76. [Google Scholar]
- Lee, H.W. A study of the use of fuzzy control theory to stabilize the gait of biped robots. Robotica 2016, 34, 777–790. [Google Scholar] [CrossRef]
- Zoss, A.B.; Hami, K.; Andrew, C. Biomechanical design of the Berkeley lower extremity exoskeleton (BLEEX). IEEE/ASME Trans. Mechatron. 2006, 11, 128–138. [Google Scholar] [CrossRef]
- Sankai, Y. Leading edge of cybernics: Robot suit hal. In Proceedings of the International Joint Conference, Orlando, FL, USA, 12–17 August 2007; pp. 1–2. [Google Scholar]
- Chen, B.; Ma, H.; Qin, L.Y.; Gao, F.; Chan, K.M.; Law, S.W.; Qin, L.; Liao, W.H. Recent developments and challenges of lower extremity exoskeletons. J. Orthop. Transl. 2016, 5, 26–37. [Google Scholar]
- Ferrati, F.; Bortoletto, R.; Pagello, E. Virtual modelling of a real exoskeleton constrained to a human musculoskeletal model. In Conference on Biomimetic and Biohybrid Systems; Springer: Berlin/Heidelberg, Germany, 2013; pp. 96–107. [Google Scholar]
- TOYOTA Global Newsroom. Available online: http://newsroom.toyota.co.jp/en/detail/15989382 (accessed on 30 October 2017).
- Dzahir, M.A.M.; Yamamoto, S.I. Recent trends in lower-limb robotic rehabilitation orthosis: Control scheme and strategy for pneumatic muscle actuated gait trainers. Robotics 2014, 3, 120–148. [Google Scholar] [CrossRef]
- Wehner, M.; Quinlivan, B.; Aubin, P.M.; Martinez-Villalpando, E.; Baumann, M.; Stirling, L.; Walsh, C. A lightweight soft exosuit for gait assistance. In Proceedings of the 2013 IEEE International Conference on Robotics and Automation (ICRA), Karlsruhe, Germany, 6–10 May 2013; pp. 3362–3369. [Google Scholar]
- Collins, S.H.; Wiggin, M.B.; Sawicki, G.S. Reducing the energy cost of human walking using an unpowered exoskeleton. Nature 2015, 522, 212–215. [Google Scholar] [CrossRef] [PubMed]
- Panizzolo, F.A.; Galiana, I.; Asbeck, A.T.; Siviy, C.; Schmidt, K.; Holt, K.G.; Walsh, C.J. A biologically-inspired multi-joint soft exosuit that can reduce the energy cost of loaded walking. J. Neuroeng. Rehabil. 2016, 13, 43. [Google Scholar] [CrossRef] [PubMed]
- Zeilig, G.; Weingarden, H.; Zwecker, M.; Dudkiewicz, I.; Bloch, A.; Esquenazi, A. Safety and tolerance of the ReWalk™ exoskeleton suit for ambulation by people with complete spinal cord injury: A pilot study. J. Spinal Cord Med. 2012, 35, 96–101. [Google Scholar] [CrossRef] [PubMed]
- Zhang, J.; Fiers, P.; Witte, K.A.; Jackson, R.W.; Poggensee, K.L.; Atkeson, C.G.; Collins, S.H. Human-in-the-loop optimization of exoskeleton assistance during walking. Science 2017, 356, 1280–1284. [Google Scholar] [CrossRef] [PubMed]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Time | Scientist/Institution | Achievement |
|---|---|---|
| 1968 | R. Smo-Sher, United States | Rig |
| 1969 | M. Vukobratovic, Yugoslavia | ZMP stability criteria |
| 1969 | Kato Ichiro, Japan | WAP-1 |
| 1970 | Witt, United Kingdom | “Witt” type robot |
| 1984 | Kato Ichiro, Japan | WL-10RD |
| 1986 | Honda, Japan | E0 |
| 1988 | National University of Defense Technology, China | KDW-I |
| 1989 | Mogeer, United States | Passive Dynamic Waking |
| 1990 | Y. F. Zheng et al., United States | Neural networks, SD-1 |
| 1993 | Honda, Japan | P-1 |
| 1997 | Honda, Japan | P-3 |
| 1997 | J. E. Pratt and G..A. Pratt, United States | Virtual model control |
| 1999 | MIT, United States | COG |
| 2000 | Honda, Japan | ASIMO |
| 2000 | Sony, Japan | SDR-3X |
| 2002 | Beijing Institute of Technology, China | BHR |
| 2004 | South Korea | HUBO |
| 2004 | RobotCub Consortium, Italy | iCUB |
| 2005 | University of Florida, United States | Rabbit |
| 2005 | MIT, America | Domo |
| 2007 | Aldebaran Robotics, France | NAO |
| 2008 | University of Tehran, Iran | Surena I |
| 2009 | Technical University of Munich, German | LOLA |
| 2009 | Aldebaran Robotics, France | Romeo |
| 2010 | AIST, Japan | HRP-4C |
| 2012 | NRL, United States | SAFFiR |
| 2013 | Institute of Robotics and Mechatronics, German | TORO |
| 2013 | Boston Dynamics, United States | PETMAN |
| 2015 | University of Tehran, Iran | Surena III |
| 2016 | Boston Dynamics, United States | Atlas |
| Type | Advantages | Disadvantages | Example |
|---|---|---|---|
| Wearable exoskeleton robot | Wearable, the range of use is wide | Uncomfortable, Rigid structure | BLEEX, HAL, ReWalk |
| Rehabilitation equipment | Functional, Rehabilitation effect is good | Bulky | Welwalk-1000, LOKOMAT |
| Soft exoskeleton robot | Light quality, Unconstrained | Auxiliary force is relatively small | Exosuit |
| Unpowered exoskeleton robot | Unpowered | Structural design is difficult | Exoboot |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, X.; She, H.; Lu, H.; Fukuda, T.; Shen, Y. State of the Art: Bipedal Robots for Lower Limb Rehabilitation. Appl. Sci. 2017, 7, 1182. https://doi.org/10.3390/app7111182
Yang X, She H, Lu H, Fukuda T, Shen Y. State of the Art: Bipedal Robots for Lower Limb Rehabilitation. Applied Sciences. 2017; 7(11):1182. https://doi.org/10.3390/app7111182
Chicago/Turabian StyleYang, Xiong, Haotian She, Haojian Lu, Toshio Fukuda, and Yajing Shen. 2017. "State of the Art: Bipedal Robots for Lower Limb Rehabilitation" Applied Sciences 7, no. 11: 1182. https://doi.org/10.3390/app7111182
APA StyleYang, X., She, H., Lu, H., Fukuda, T., & Shen, Y. (2017). State of the Art: Bipedal Robots for Lower Limb Rehabilitation. Applied Sciences, 7(11), 1182. https://doi.org/10.3390/app7111182