A Novel Classification Optimization Approach Integrating Class Adaptive MRF and Fuzzy Local Information for High Spatial Resolution Multispectral Imagery


Abstract
:1. Introduction
2. Methodology
2.1. Class Adaptive MRF
2.2. A Novel Local Similarity Measure
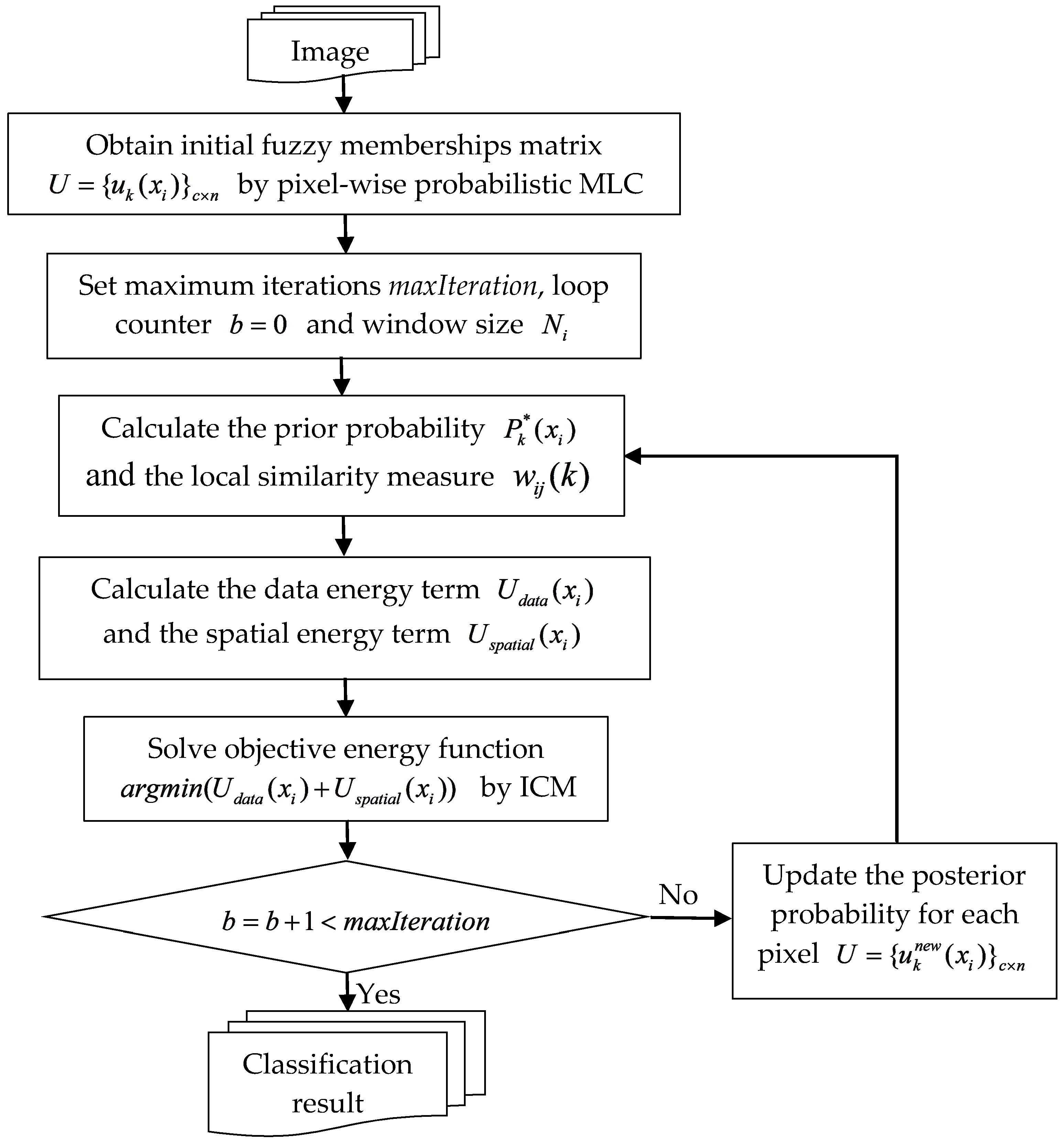
2.3. Proposed Method
- Step 1:
- Initialization
- Step 2:
- Calculate the prior probability and the local similarity measure
- Step 3:
- Calculate the data energy term and the spatial energy term
- Step 4:
- Solve objective energy function
- Step 5:
- Termination
3. Experimental Results and Discussion
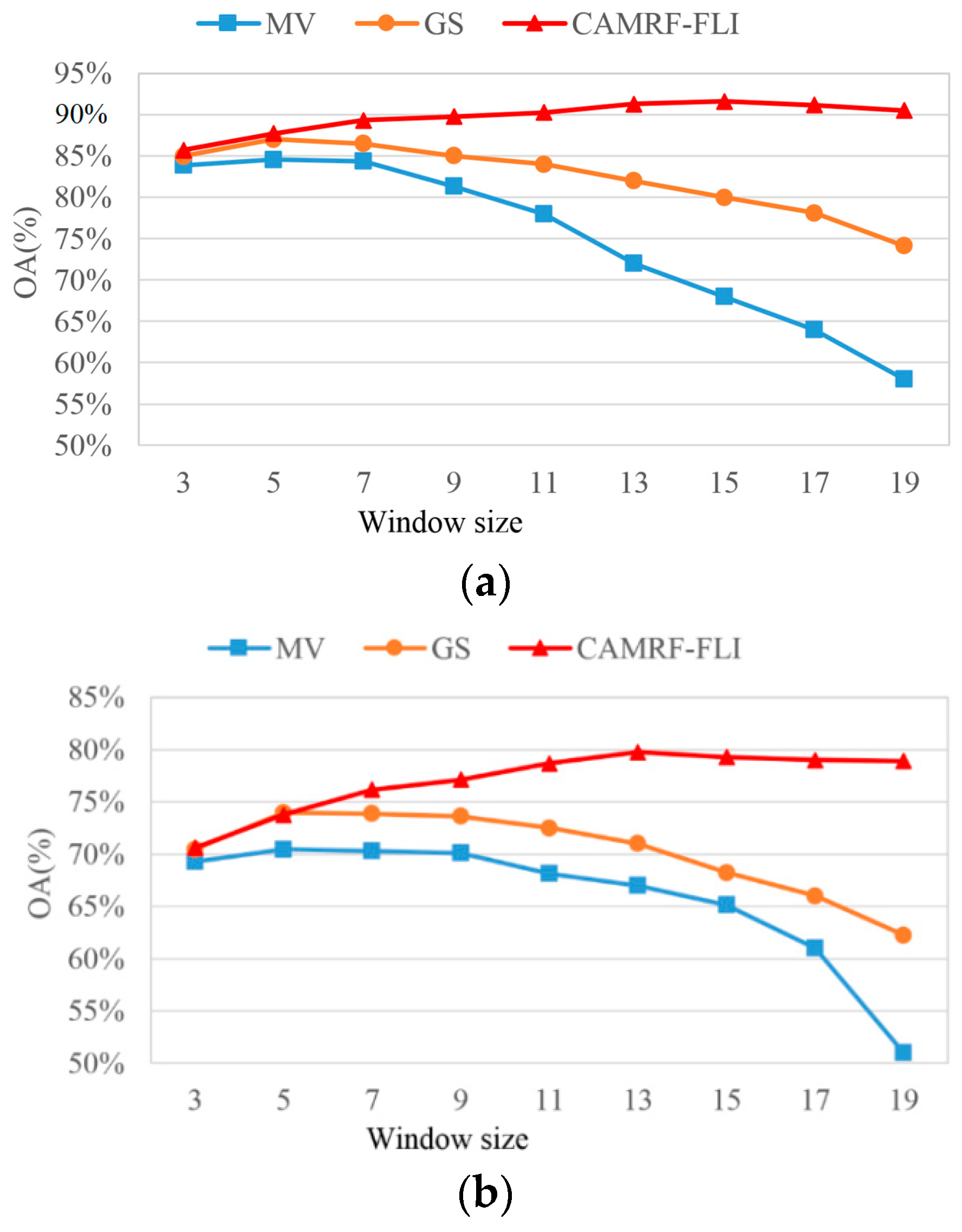
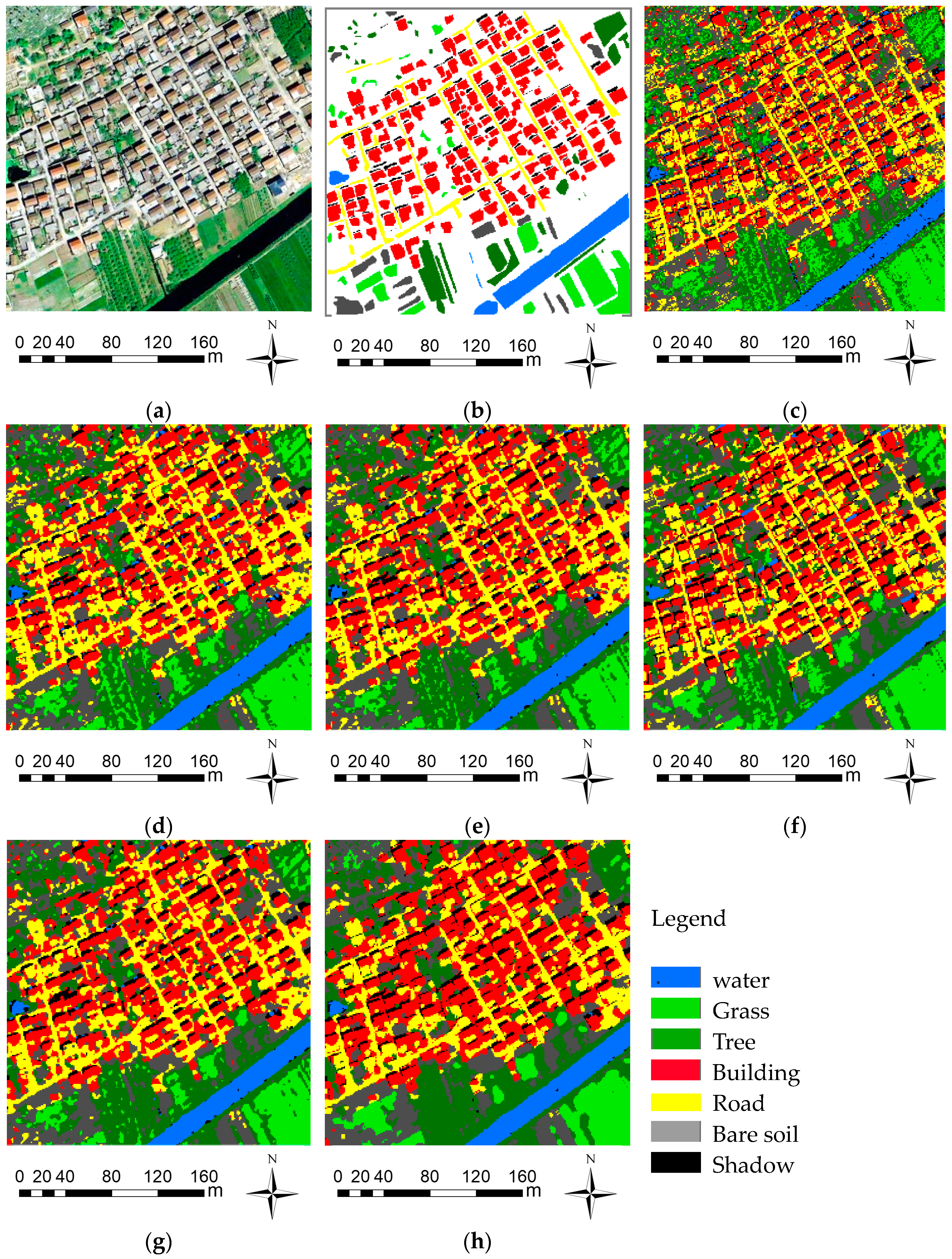
3.1. Experiment on Data Set 1
3.2. Experiment on Data Set 2
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Fauvel, M.; Tarabalka, Y.; Benediktsson, J.A.; Chanussot, J.; Tilton, J.C. Advances in spectral-spatial classification of hyperspectral Images. Proc. IEEE 2012, 101, 652–675. [Google Scholar] [CrossRef]
- Huang, X.; Zhang, L. An SVM ensemble approach combining spectral, structural, and semantic features for the classification of high-resolution remotely sensed imagery. IEEE Trans. Geosci. Remote Sens. 2013, 51, 257–272. [Google Scholar] [CrossRef]
- Huang, X.; Lu, Q.; Zhang, L.; Plaza, A. New postprocessing methods for remote sensing image classification: A systematic study. IEEE Trans. Geosci. Remote Sens. 2014, 11, 7140–7159. [Google Scholar] [CrossRef]
- Li, S. Markov Random Field Modeling in Image Analysis; Springer: New York, NY, USA, 2010. [Google Scholar]
- Lu, Q.; Huang, X.; Liu, T.; Zhang, L. A structural similarity-based label-smoothing algorithm for the post-processing of land-cover classification. Remote Sens. Lett. 2016, 7, 437–445. [Google Scholar] [CrossRef]
- Moser, G.; Sebastiano, B.; Serpico, S.; Benediktsson, J. Land-cover mapping by markov modeling of spatial–contextual information in very-high-resolution remote sensing images. Proc. IEEE 2013, 101, 631–651. [Google Scholar] [CrossRef]
- Myint, S.W.; Gober, P.; Brazel, A.; Grossman-Clarke, S.; Weng, Q. Per-pixel vs. object-based classification of urban land cover extraction using high spatial resolution imagery. Remote Sens. Environ. 2011, 115, 1145–1161. [Google Scholar] [CrossRef]
- Schindler, K. An overview and comparison of smooth labeling methods for land-cover classification. IEEE Trans. Geosci. Remote Sens. 2012, 50, 4534–4545. [Google Scholar] [CrossRef]
- Tarabalka, Y.; Fauvel, M.; Chanussot, J. SVM- and MRF-based method for accurate classification of hyperspectral images. IEEE Geosci. Remote Sens. Lett. 2010, 7, 736–740. [Google Scholar] [CrossRef]
- Wang, L.; Huang, X.; Zheng, C.; Zhang, Y. A Markov random field integrating spectral dissimilarity and class co-occurrence dependency for remote sensing image classification optimization. ISPRS J. Photogramm. Remote Sens. 2017, 128, 223–239. [Google Scholar] [CrossRef]
- Zhang, H.; Shi, W.; Wang, Y.; Hao, M.; Miao, Z. Classification of very high spatial resolution imagery based on a new pixel shape feature set. IEEE Geosci. Remote Sens. Lett. 2014, 11, 940–944. [Google Scholar] [CrossRef]
- Aghighi, H.; Trinder, J.; Tarabalka, Y.; Samsung, L. Dynamic block-basedparameter estimation for MRF classification of high-resolution images. IEEE Geosci. Remote Sens. Lett. 2014, 11, 1687–1691. [Google Scholar] [CrossRef]
- Büschenfeld, T.; Ostermann, J. Edge preserving land cover classification refinement using mean shift segmentation. In Proceedings of the 4th International Conference on GEographic Object Based Image Analysis, Rio De Janeiro, Brazil, 7–9 May 2012; pp. 242–247. [Google Scholar]
- Foody, G.M. Thematic map comparison: Evaluating the statistical significance of differences in classification accuracy. Photogramm. Eng. Remote Sens. 2004, 70, 627–633. [Google Scholar] [CrossRef]
- Kang, X.D.; Li, S.T.; Jon Atli Benediktsson, J.A. Spectral–spatial hyperspectral image classification with edge-preserving filtering. IEEE Trans. Geosci. Remote Sens. 2014, 52, 2666–2677. [Google Scholar] [CrossRef]
- Zhang, H.; Bruzzone, L.; Shi, W.Z.; Hao, M. Enhanced spatially constrained remotely sensed imagery classification using a fuzzy local double neighborhood information c-means clustering algorithm. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2018, 11, 2896–2910. [Google Scholar] [CrossRef]
- Yu, Q.; Clausi, D.A. IRGS: Image segmentation using edge penalties and region growing. IEEE Trans. Pattern Anal. Mach. Intell. 2008, 30, 2126–2139. [Google Scholar] [PubMed]
- Zhang, G.; Jia, X. Simplified conditional random fields with class boundary constraint for spectral-spatial based remote sensing image classification. IEEE Geosci. Remote Sens. Lett. 2012, 9, 856–858. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Class | Training Samples | Testing Samples | MLC | MV (5 × 5) | MRF | OBV | GS (5 × 5) | CAMRF-FLI (15 × 15) |
|---|---|---|---|---|---|---|---|---|
| Water | 2010 | 8042 | 91.93% | 96.53% | 95.47% | 97.28% | 96.12% | 95.93% |
| Grass | 1047 | 4187 | 78.43% | 81.01% | 77.02% | 79.27% | 76.84% | 81.59% |
| Tree | 1355 | 5421 | 53.22% | 53.02% | 68.48% | 62.39% | 72.20% | 93.65% |
| Building | 7846 | 31,383 | 52.52% | 55.51% | 57.74% | 54.50% | 58.76% | 91.13% |
| Road | 1863 | 7454 | 86.73% | 91.89% | 89.70% | 92.54% | 90.30% | 86.09% |
| Bare soil | 1130 | 4522 | 80.09% | 86.15% | 87.78% | 90.15% | 89.34% | 98.41% |
| Shadow | 1134 | 4536 | 70.84% | 82.95% | 88.60% | 96.13% | 89.75% | 96.19% |
| OA | 80.79% | 84.61% | 86.11% | 85.16% | 87.15% | 91.60% | ||
| κ | 0.7494 | 0.7949 | 0.8145 | 0.8028 | 0.8278 | 0.8852 |
| Class | Training Samples | Testing Samples | MLC | MV (5 × 5) | MRF | OBV | GS (5 × 5) | CAMRF-FLI (13 × 13) |
|---|---|---|---|---|---|---|---|---|
| Water | 2042 | 8167 | 92.49% | 96.77% | 95.91% | 97.55% | 96.69% | 97.60% |
| Grass | 2468 | 9874 | 80.46% | 80.86% | 77.16% | 83.40% | 77.08% | 80.67% |
| Tree | 2075 | 8302 | 52.30% | 53.24% | 68.94% | 59.03% | 73.16% | 90.35% |
| Building | 9087 | 36,347 | 53.47% | 56.90% | 58.96% | 56.53% | 60.19% | 67.77% |
| Road | 2435 | 9741 | 86.30% | 91.35% | 89.03% | 89.84% | 89.47% | 84.80% |
| Bare soil | 1089 | 4354 | 79.28% | 85.88% | 87.21% | 90.86% | 89.25% | 97.24% |
| Shadow | 982 | 3930 | 69.44% | 77.86% | 85.55% | 90.31% | 86.31% | 98.83% |
| OA | 66.86% | 70.23% | 72.40% | 71.74% | 73.66% | 79.75% | ||
| κ | 0.5900 | 0.6299 | 0.6558 | 0.6495 | 0.6706 | 0.7419 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhou, Y.; Zhang, H.; Xu, X.; Li, M.; Zheng, L.; Zhu, Y. A Novel Classification Optimization Approach Integrating Class Adaptive MRF and Fuzzy Local Information for High Spatial Resolution Multispectral Imagery. Appl. Sci. 2018, 8, 1792. https://doi.org/10.3390/app8101792
Zhou Y, Zhang H, Xu X, Li M, Zheng L, Zhu Y. A Novel Classification Optimization Approach Integrating Class Adaptive MRF and Fuzzy Local Information for High Spatial Resolution Multispectral Imagery. Applied Sciences. 2018; 8(10):1792. https://doi.org/10.3390/app8101792
Chicago/Turabian StyleZhou, Yuejin, Hua Zhang, Xiaoding Xu, Mingpeng Li, Lihui Zheng, and Yakun Zhu. 2018. "A Novel Classification Optimization Approach Integrating Class Adaptive MRF and Fuzzy Local Information for High Spatial Resolution Multispectral Imagery" Applied Sciences 8, no. 10: 1792. https://doi.org/10.3390/app8101792
APA StyleZhou, Y., Zhang, H., Xu, X., Li, M., Zheng, L., & Zhu, Y. (2018). A Novel Classification Optimization Approach Integrating Class Adaptive MRF and Fuzzy Local Information for High Spatial Resolution Multispectral Imagery. Applied Sciences, 8(10), 1792. https://doi.org/10.3390/app8101792