Design of Wing Root Rotation Mechanism for Dragonfly-Inspired Micro Air Vehicle

Abstract
:1. Introduction
2. Flight Characteristics of Dragonflies
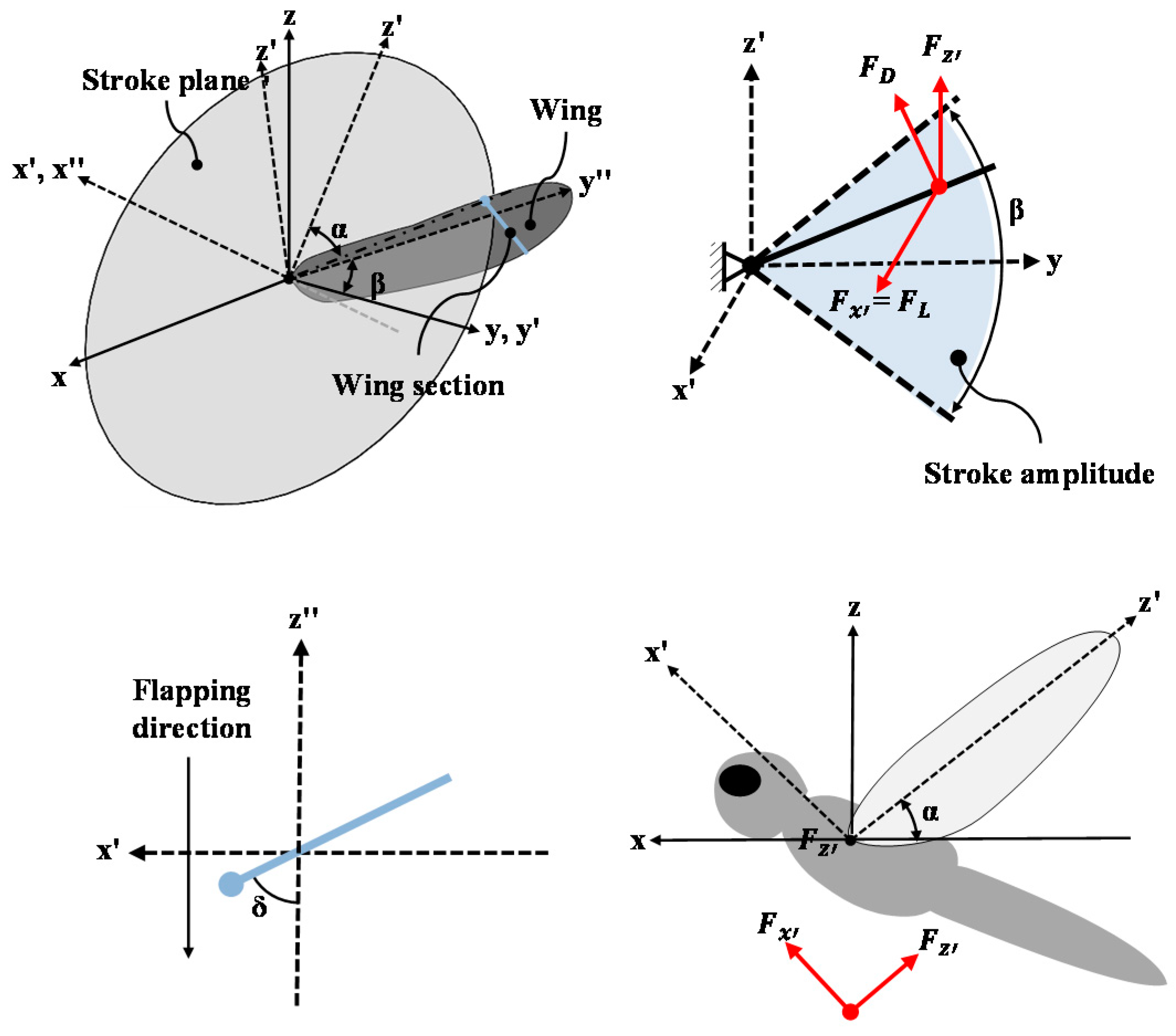
2.1. Kinematics of Dragonfly Flight
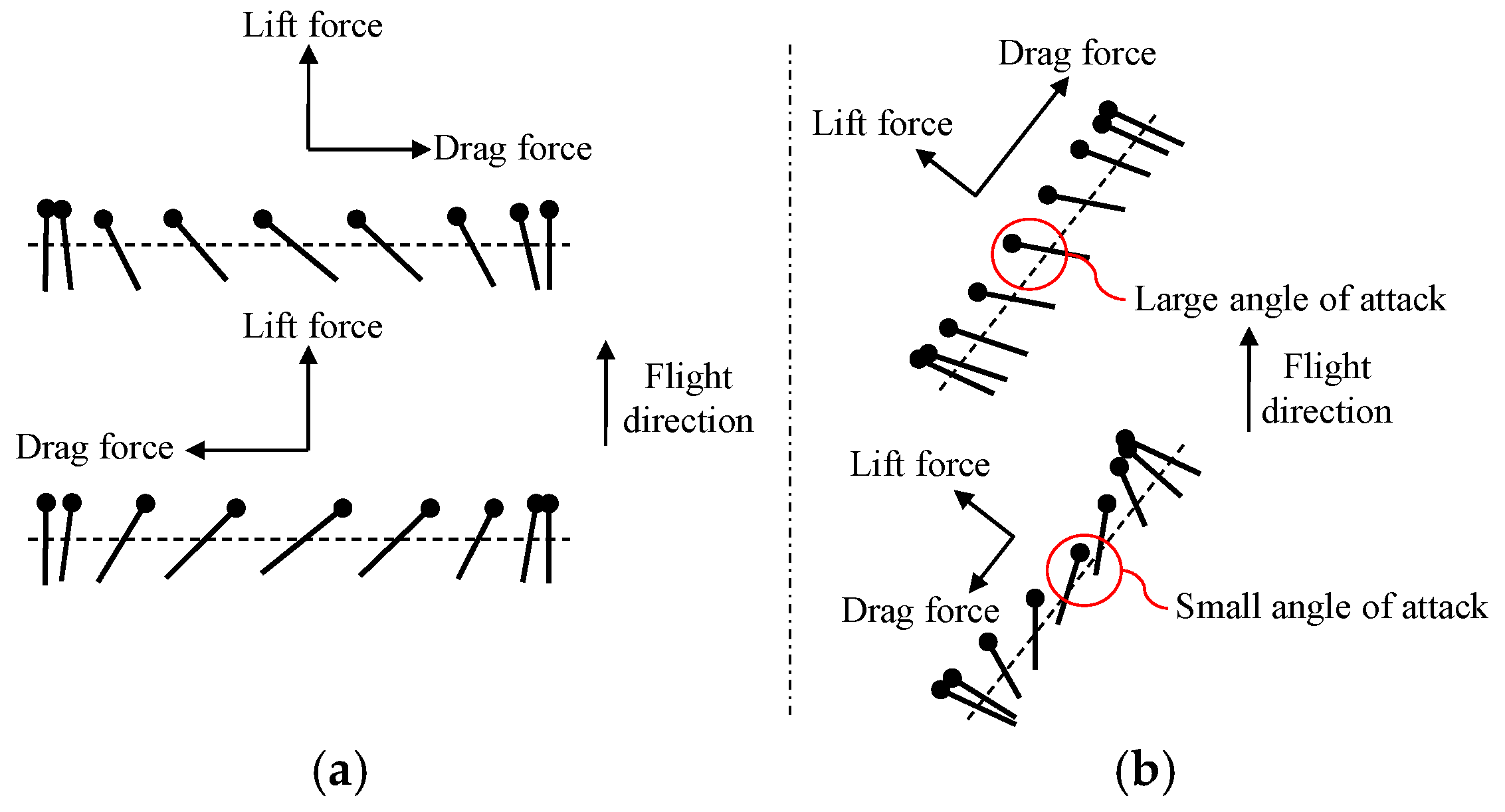
2.2. Aerodynamics of Dragonfly Flight
3. Development of a Wing Root Rotation Mechanism
3.1. Passive Wing Rotation Mechanism
3.2. Concept of Wing Root Rotation Mechanism
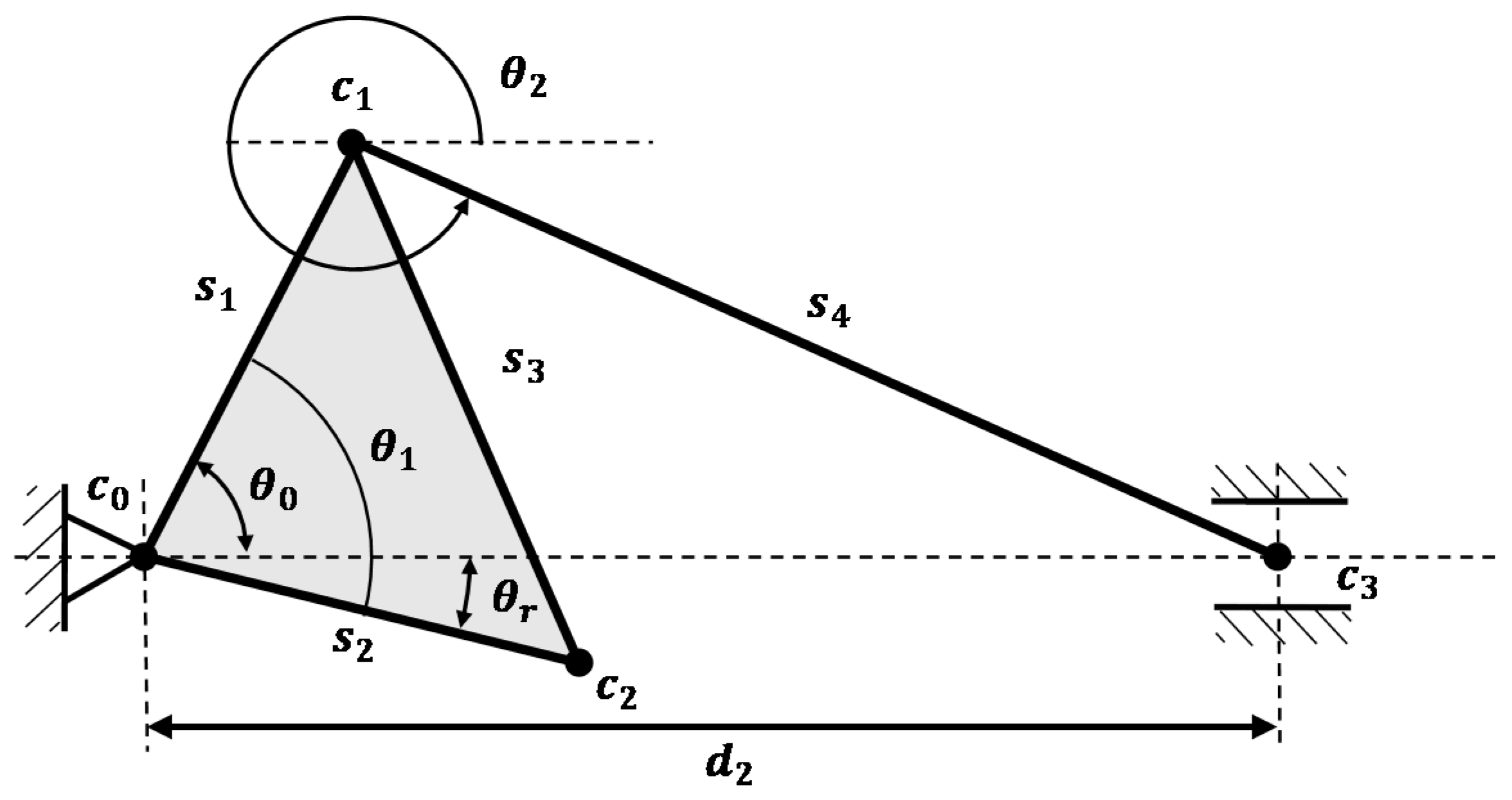
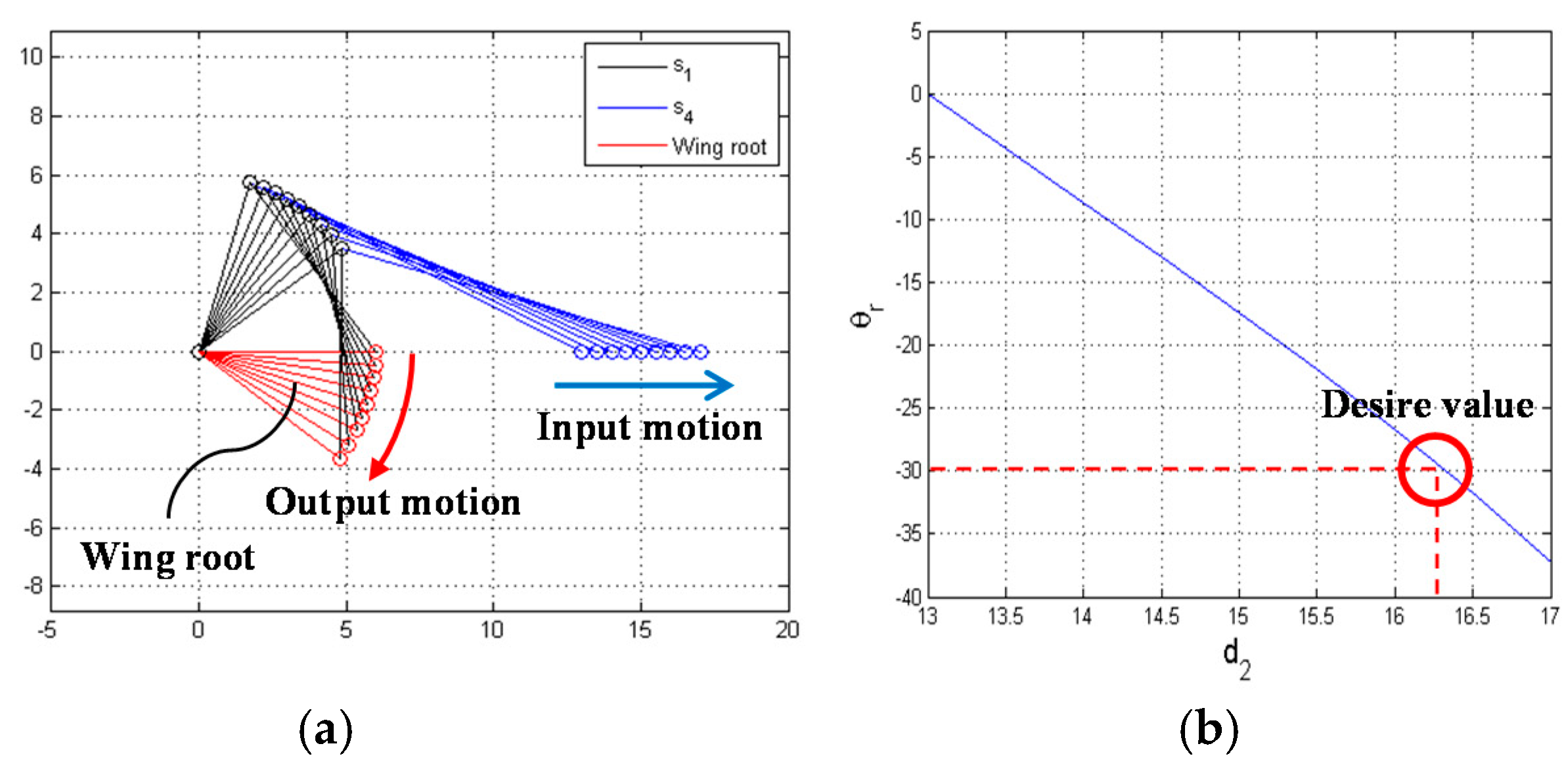
3.3. Kinematics of Wing Root Rotation Mechanism
4. Design of Flapping Mechanism
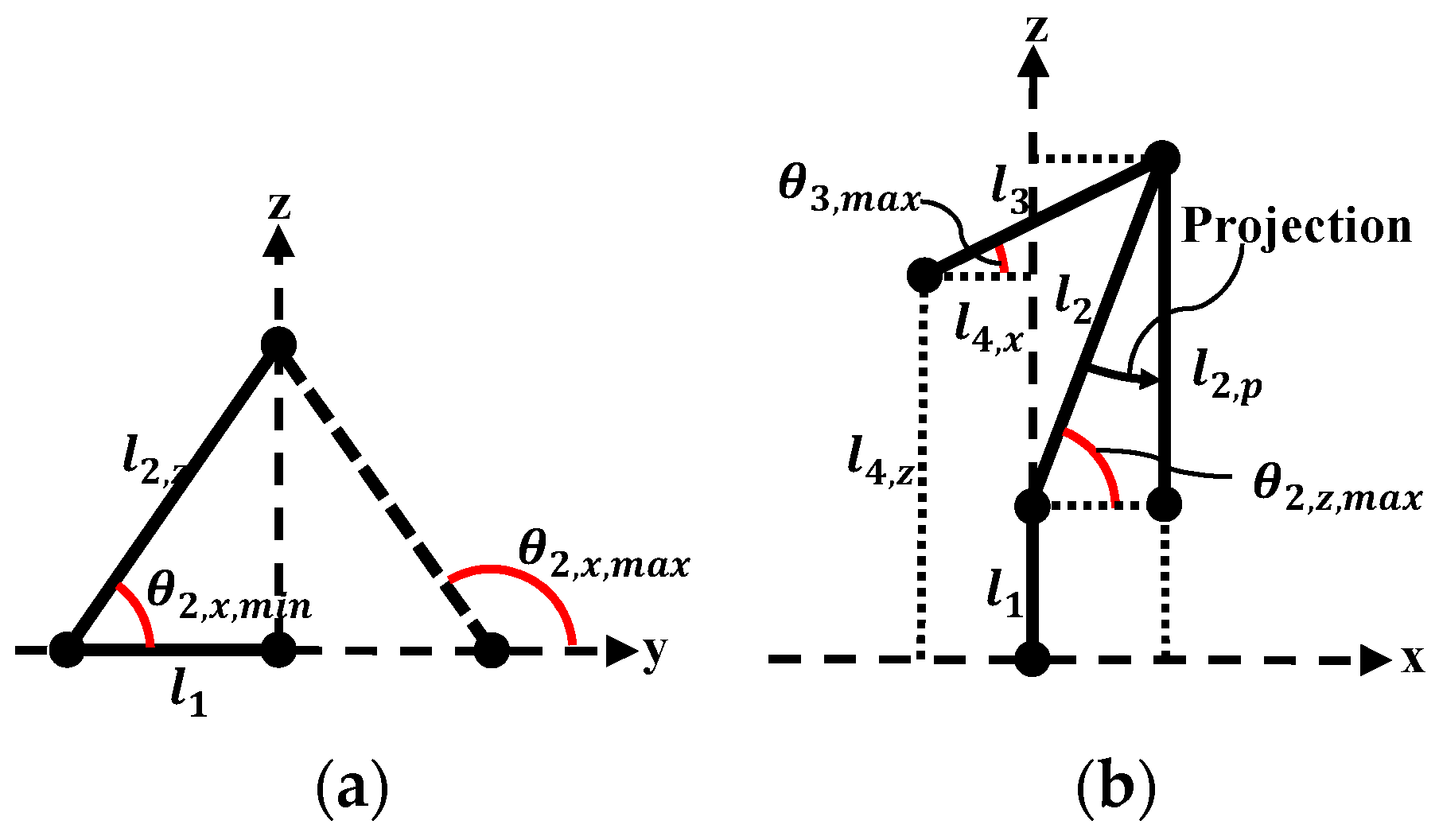
4.1. Analysis of Kinematics
4.2. Define Link Length of Flapping Mechanism
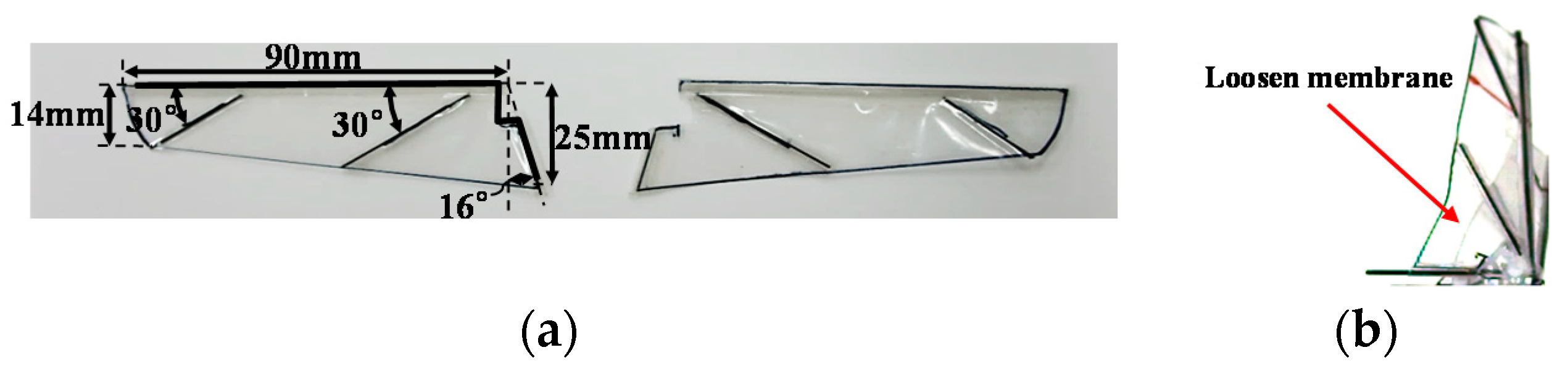
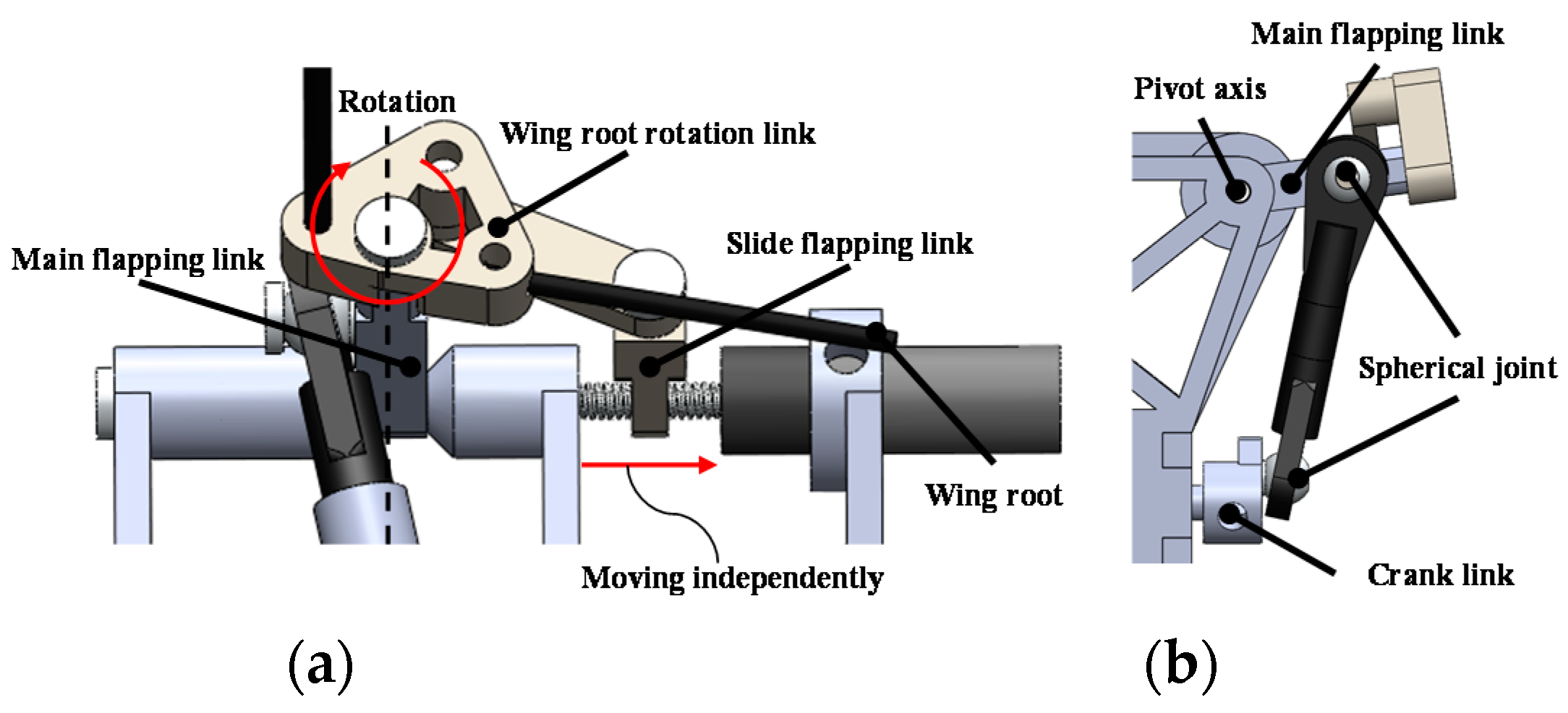
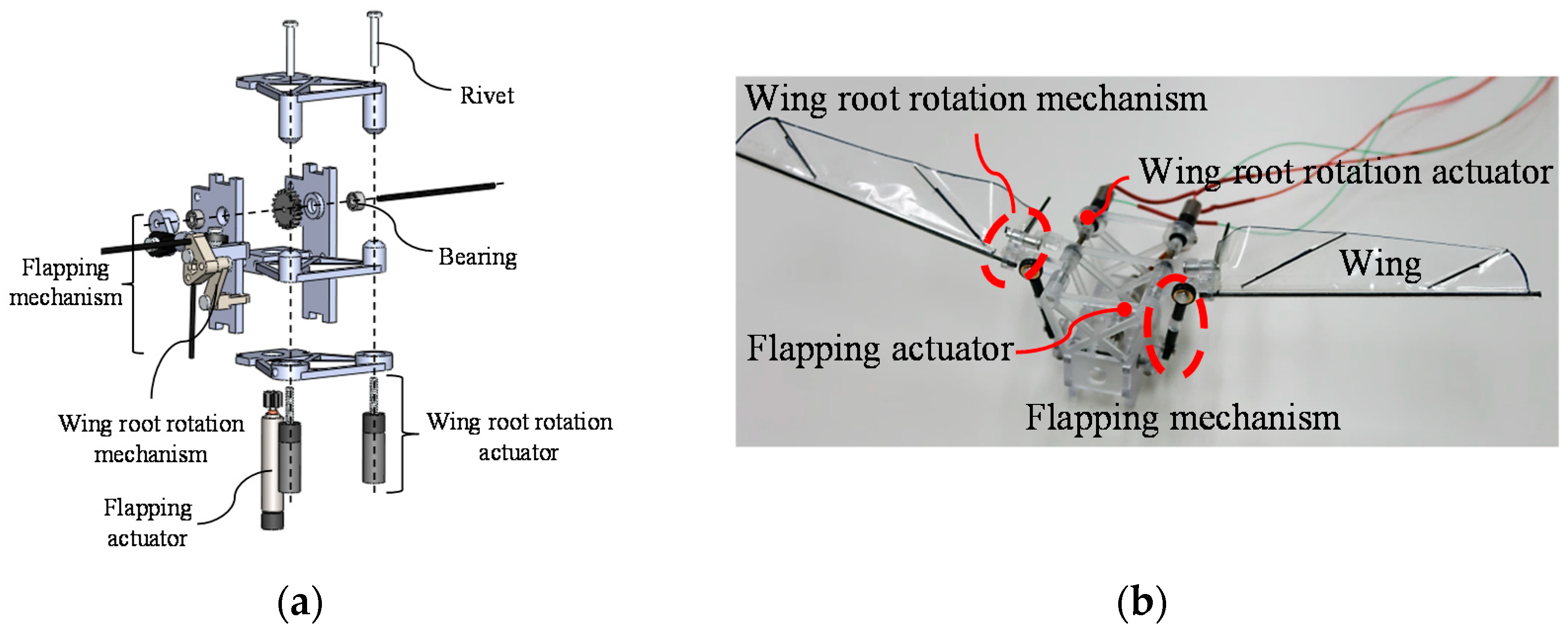
5. Design and Fabrication of Prototype
6. Experiment and Analysis
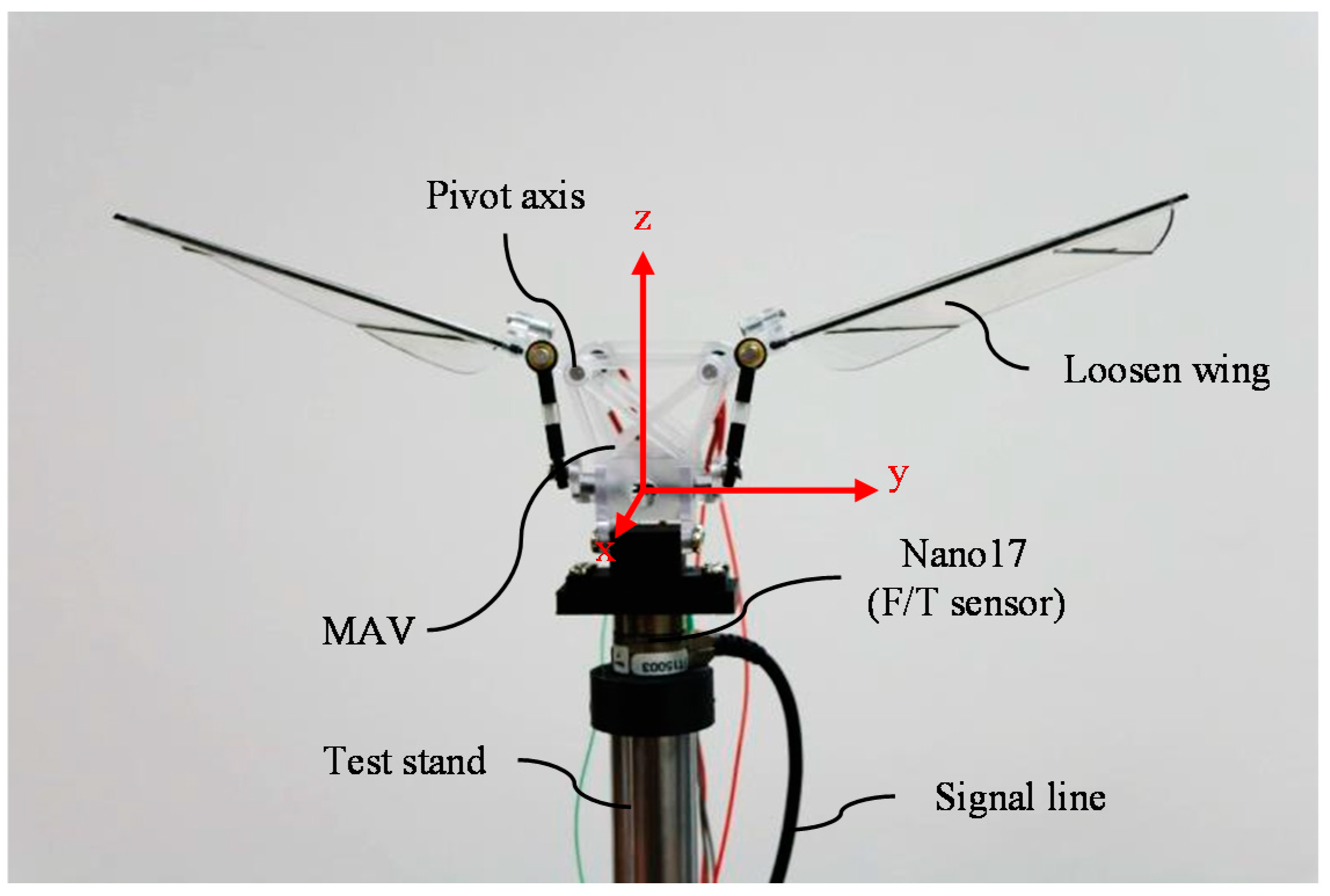
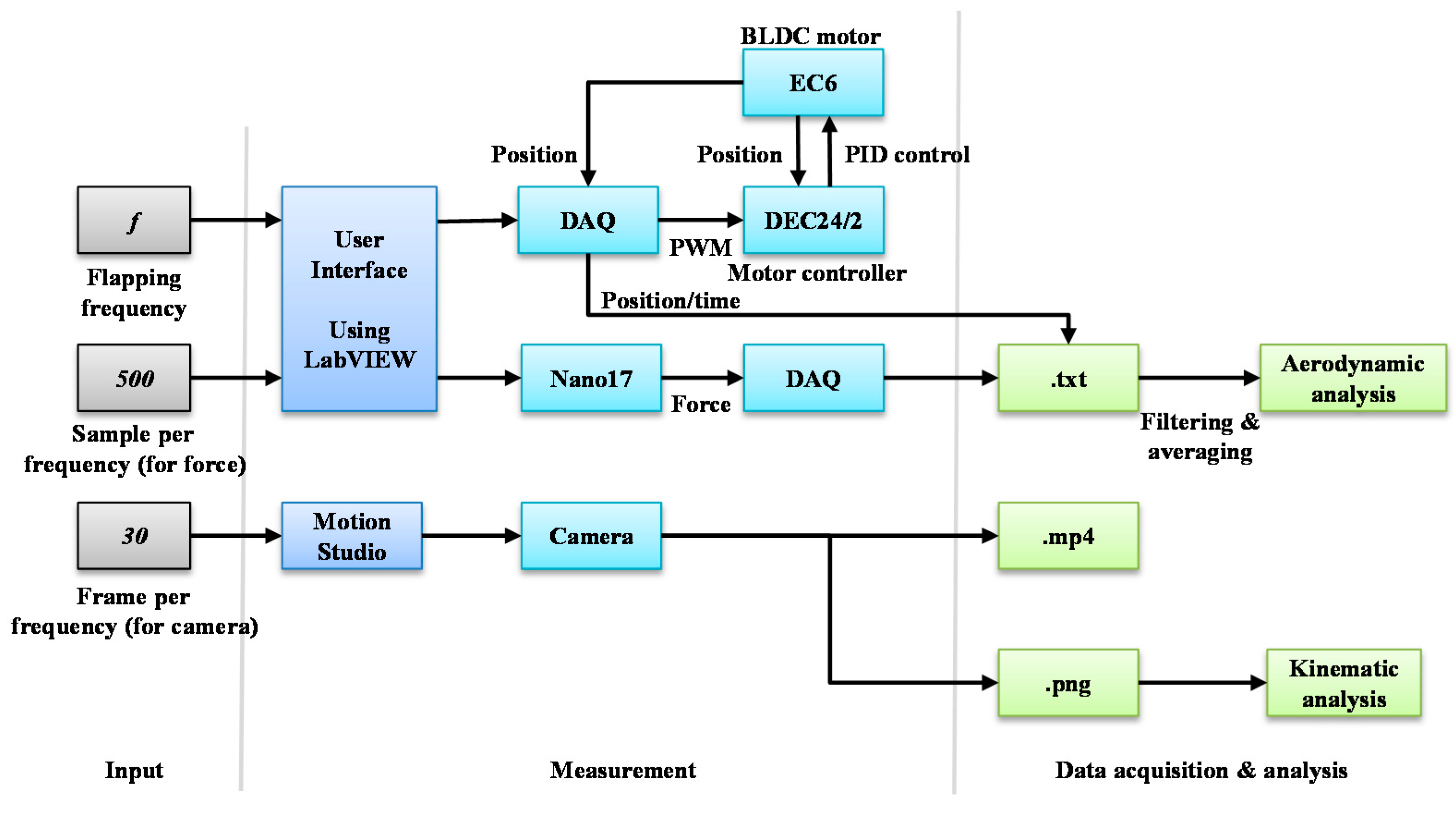
6.1. Experimental Setup
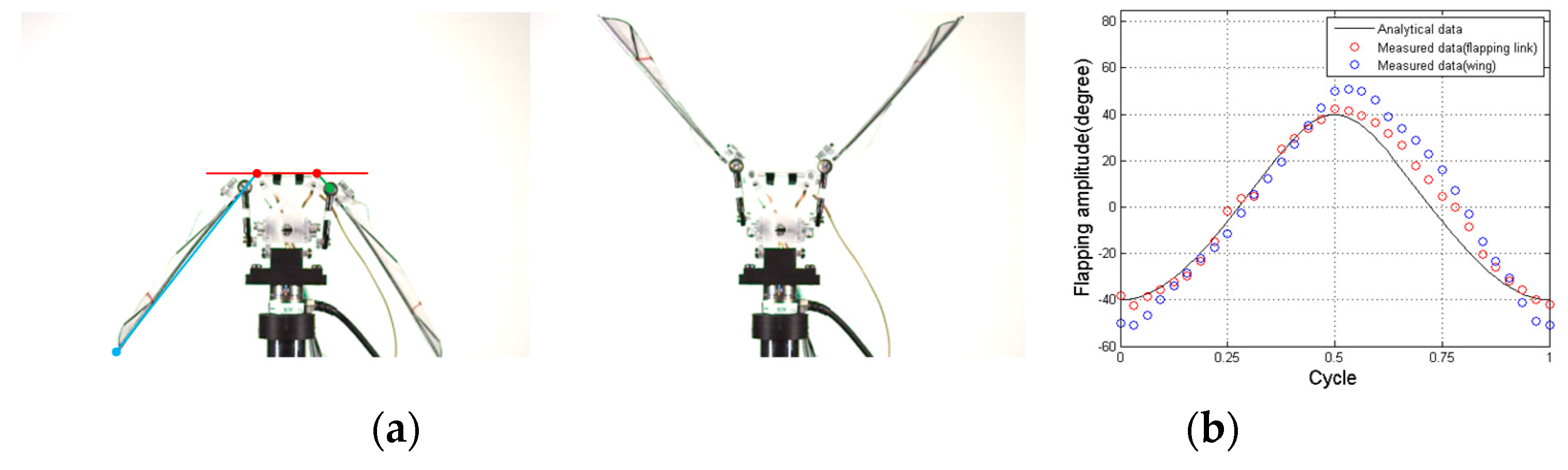
6.2. Analysis of Kinematics
6.2.1. Stroke Amplitude
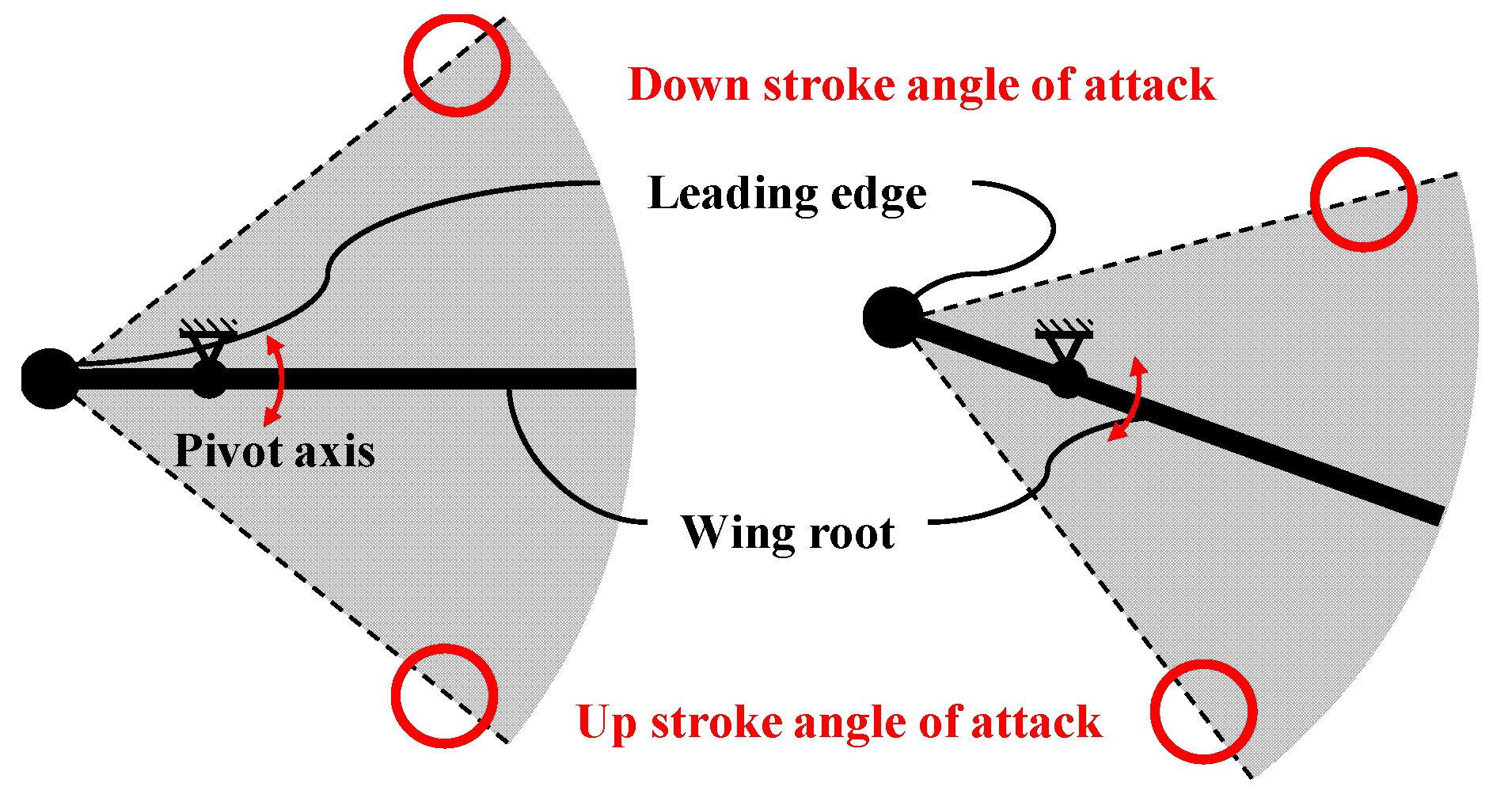
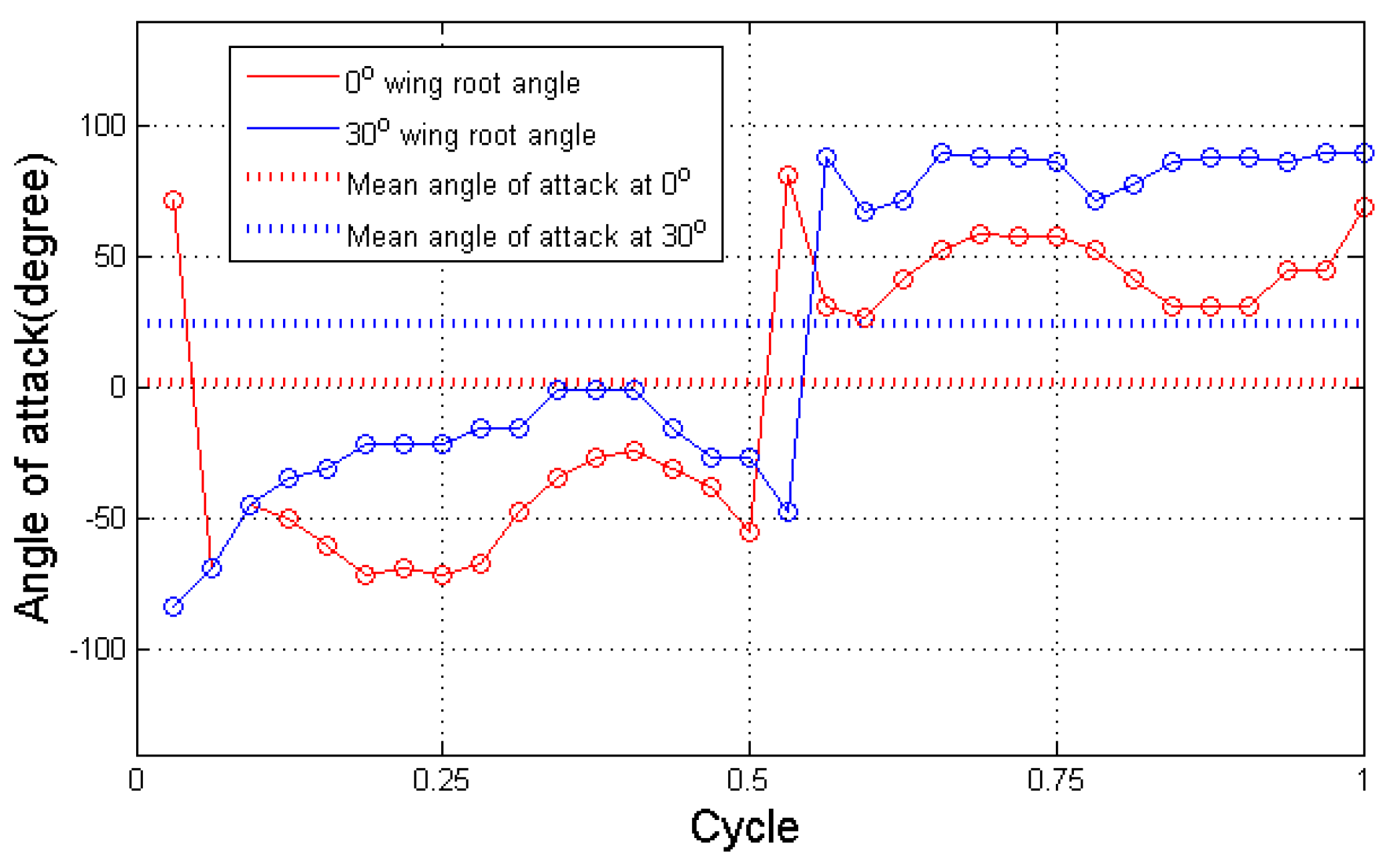
6.2.2. The Wing Angle of Attack
6.3. Analysis of Aerodynamics
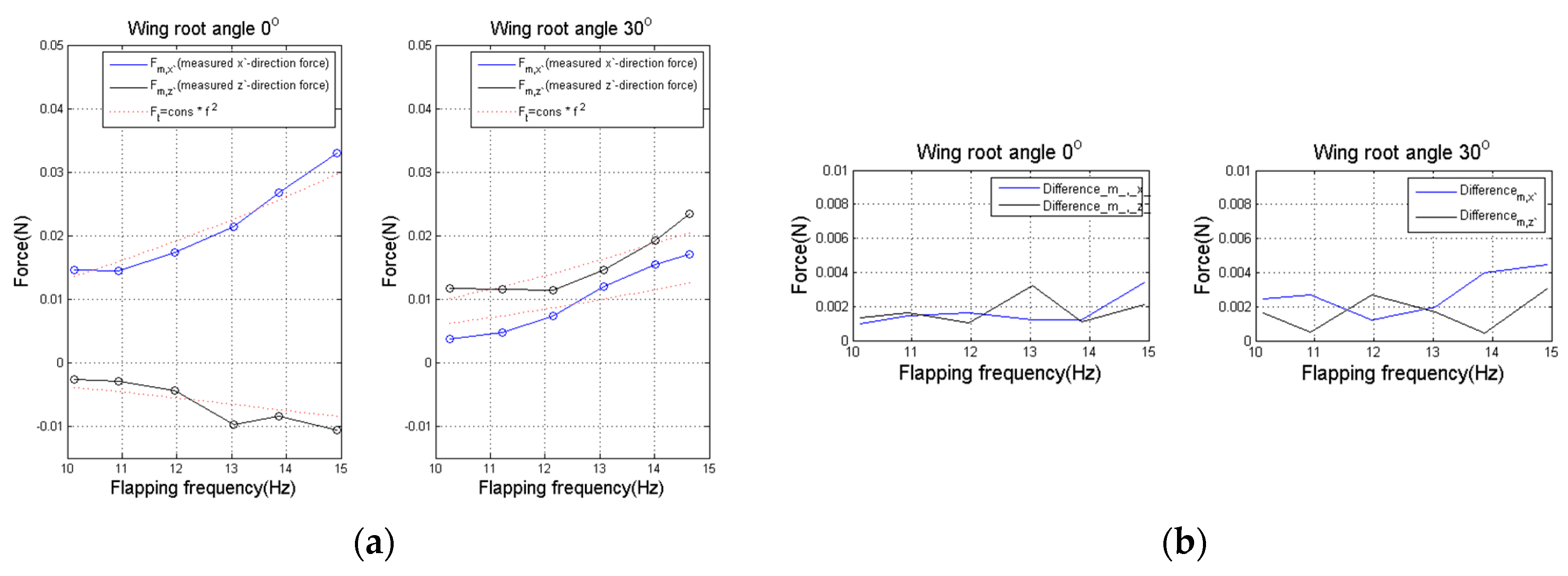
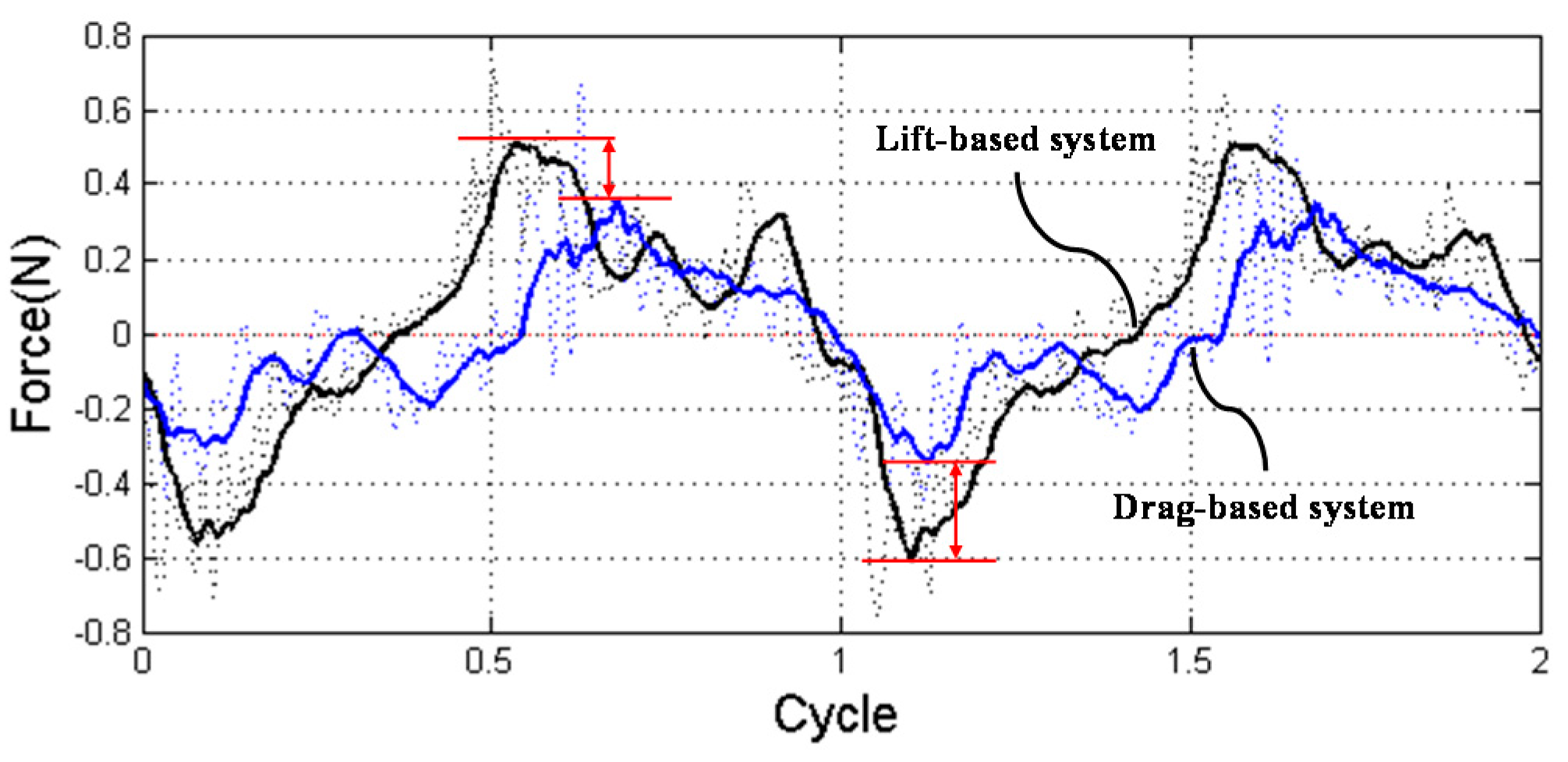
6.3.1. Comparison between Horizontal Force Amplitude
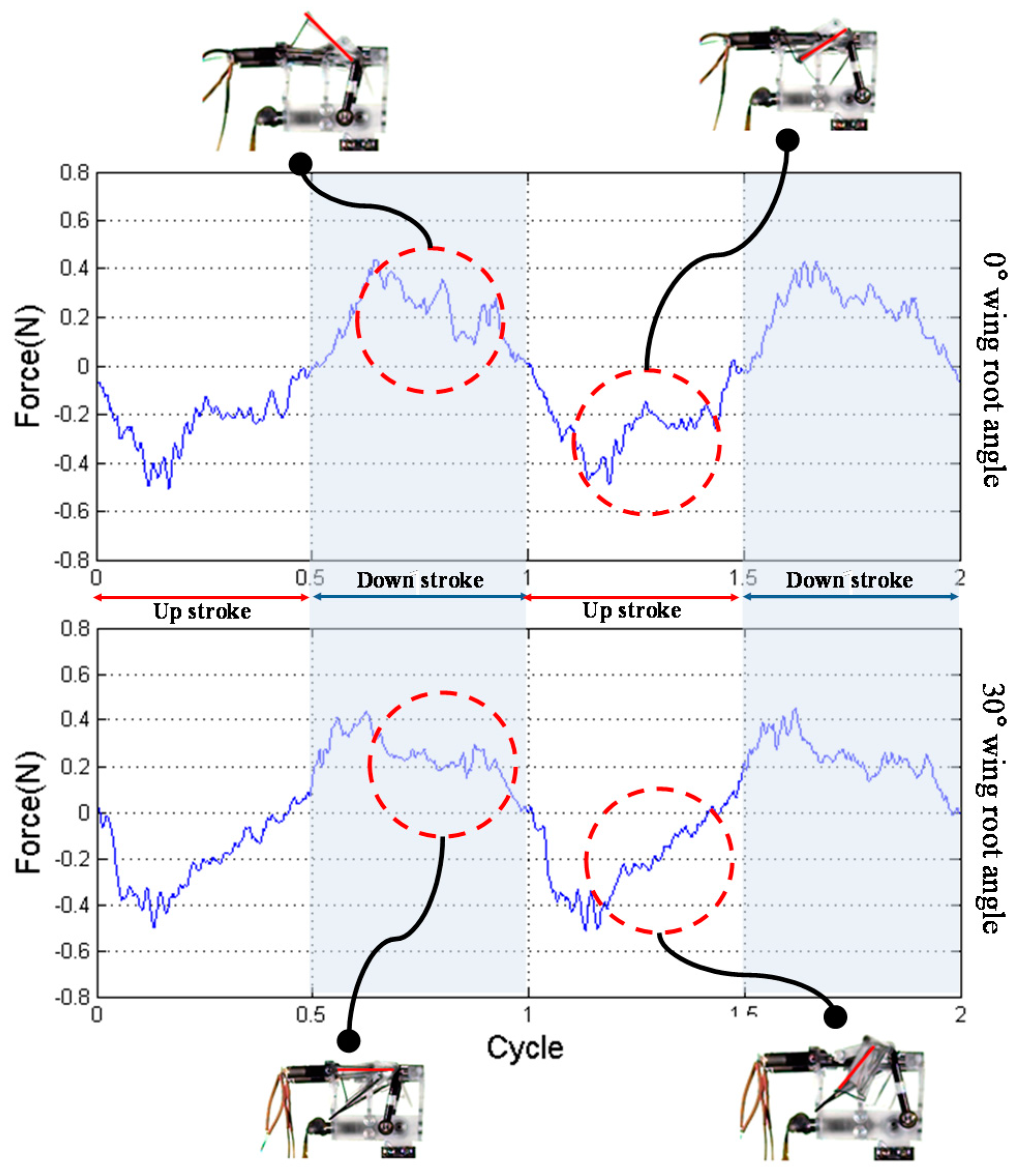
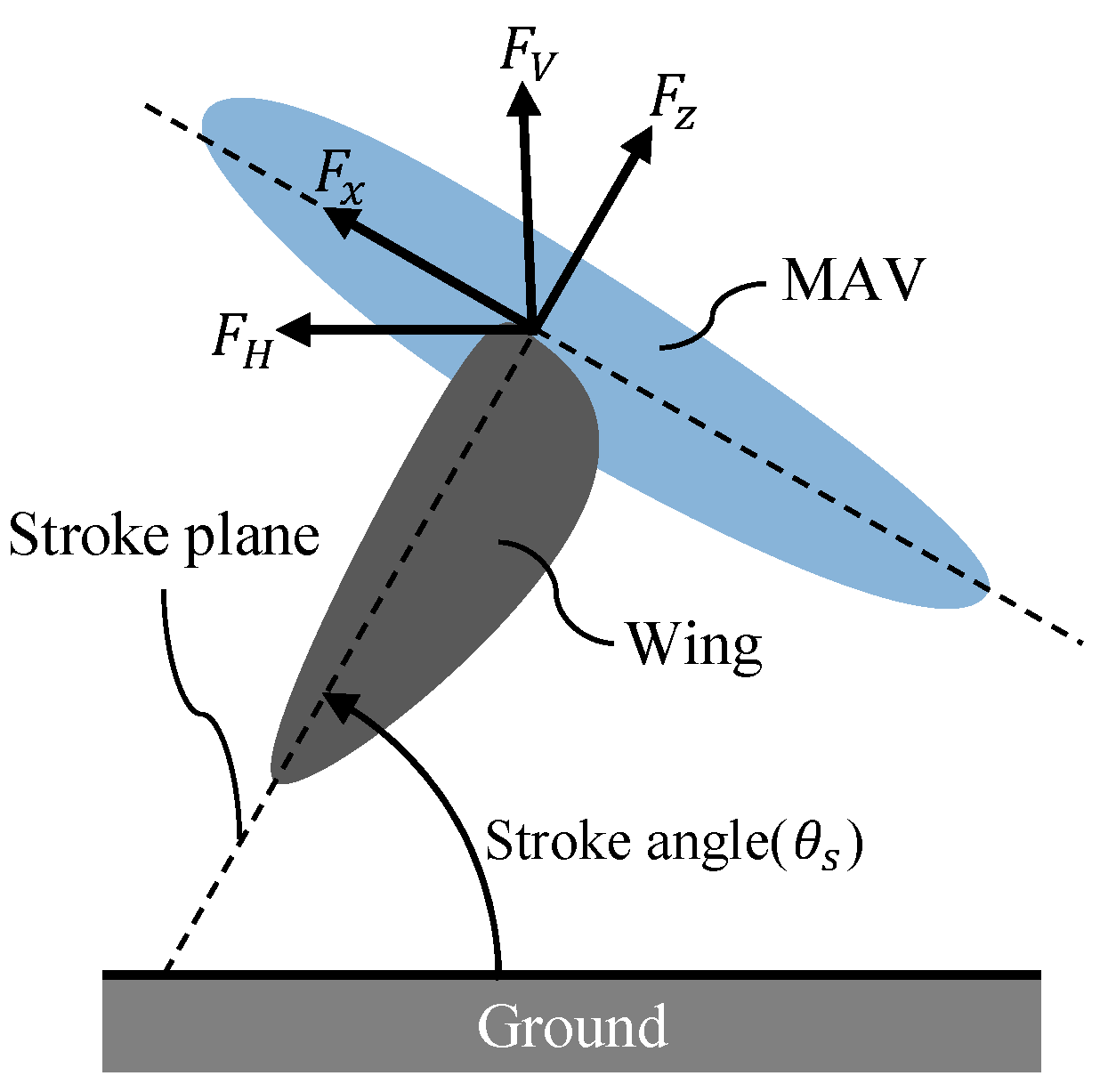
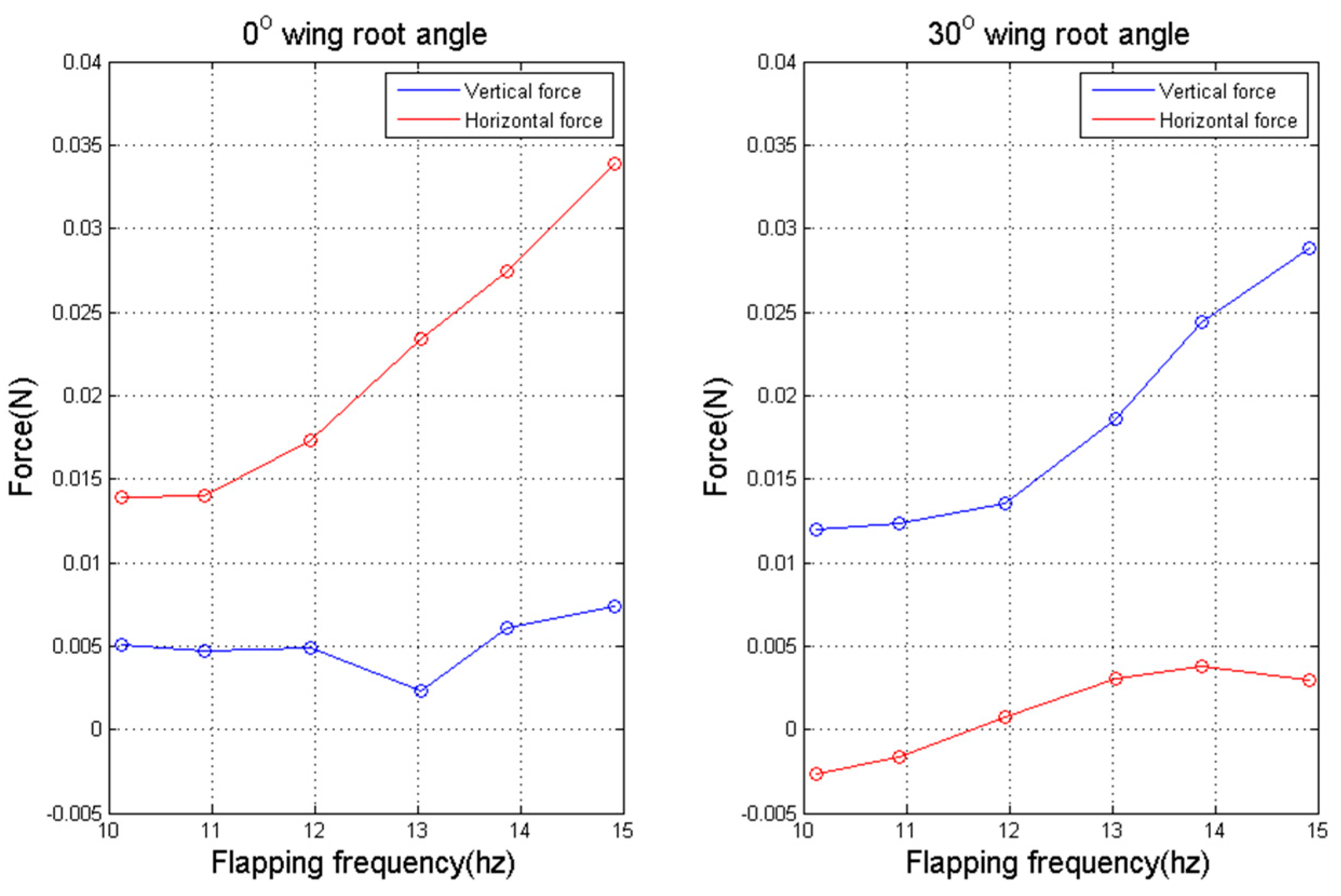
6.3.2. Force Direction Change with Respect to Wing Root Angle
7. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Wood, R.J. Design, fabrication, and analysis of a 3DOF, 3 cm flapping wing mav. In Proceedings of the 2007 International Conference on Intelligent Robots and Systems, San Diego, CA, USA, 29 October–2 November 2007; pp. 1576–1581. [Google Scholar]
- Keennon, M.; Klingebiel, K.; Won, H.; Andriukov, A. Development of the Nano Hummingbird: A tailless flapping wing micro air vehicle. In Proceedings of the 50th AIAA Aerospace Sciences Meeting, Nashville, TN, USA, 9–12 January 2012; p. 588. [Google Scholar]
- Phan, H.V.; Park, H.C. Generation of Control Moments in an Insect-link Tailless Flapping-wing Micro Air Vehicle by Changing the Stroke-plane Angle. J. Bionic Eng. 2016, 13, 449–457. [Google Scholar] [CrossRef]
- Rosen, M.H.; Pivain, G.L.; Sahai, R.; Jafferis, N.T.; Wood, R.J. Development of a 3.2 g Untethered Flapping-Wing Platform for Flight Energetics and Control Experiments. In Proceedings of the 2016 IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Sweden, 16–21 May 2016; pp. 3227–3233. [Google Scholar]
- Ramezani, A.; Shi, X.; Chung, S.J.; Hutchinson, S. Bat Bot (B2), A Biologically Inspired Flying Machine. In Proceedings of the 2016 IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Sweden, 16–21 May 2016; pp. 3219–3226. [Google Scholar]
- Hsiao, F.Y.; Yang, L.J.; Lin, S.H.; Lin, S.H.; Chen, C.L.; Shen, J.F. Autopilots for Ultra Lightweight Robotic Birds: Automatic Altitude Control and System integration of a Sub-10g Weight Flapping-Wing Micro Air Vehicle. IEEE Control Syst. Mag. 2012, 14, 35–48. [Google Scholar]
- Karásek, M.; Muijres, F.T.; Wagter, C.D.; Remes, B.D.W.; de Croon, G.C.H.E. A tailless aerial robotic flapper reveals that flies use torque coupling in rapid banked turns. Science 2018, 361, 1089–1094. [Google Scholar] [CrossRef] [PubMed]
- Alexander, D. Unusual phase relationships between the forewing and hindwings in flying dragonflies. J. Exp. Biol. 1984, 109, 379–383. [Google Scholar]
- Norberg, R. Hovering flight of the dragonfly: Aeschna juncea L. Kinematics and aerodynamics. Swim. Fly. Nat. 1975, 2, 763–780. [Google Scholar]
- Wang, J.K.; Sun, M. A computational study of the aerodynamics and forewing-hindwing interaction of a model dragonfly in forward flight. J. Exp. Biol. 2005, 208, 3785–3804. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Hu, Z.; Deng, X.Y. Aerodynamic interaction between forewing and hindwing of a hovering dragonfly. Acta Mech. Sin. 2014, 30, 787–799. [Google Scholar] [CrossRef]
- Usherwood, J.R.; Lehmann, F.O. Phasing of dragonfly wings can Improver aerodynamic efficiency by removing swirl. J. R. Soc. Interface 2008, 5, 1303–1307. [Google Scholar] [CrossRef] [PubMed]
- Wang, Z.J. Dissecting insect flight. Annu. Rev. Fluid Mech. 2005, 37, 183–210. [Google Scholar] [CrossRef]
- Wang, Z.J. The role of drag in insect hovering. J. Exp. Biol. 2004, 207, 4147–4155. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Vogel, S. Lift in Moving Fluids; Princeton University: Princeton, NJ, USA, 1996. [Google Scholar]
- Ellington, C.P. The aerodynamics of Hovering Insect Flight. III. Kinematics. Philos. Trans. R. Soc. Lond. B 1984, 305, 41–78. [Google Scholar] [CrossRef]
- Ellington, C.P. The Novel Aerodynamics of Insect Flight: Applications to Micro-air Vehicles. J. Exp. Biol. 1999, 202, 3439–3448. [Google Scholar] [PubMed]
- San, S.P.; Dickinson, M.H. The Control of Flight Force by a Flapping Wing: Lift and Drag Production. J. Exp. Biol. 2001, 204, 2607–2626. [Google Scholar]
- Dickinson, M.H. The Effects of Wing Rotation on Unsteady Aerodynamic Performance at Low Reynolds Numbers. J. Exp. Biol. 1994, 192, 179–206. [Google Scholar] [PubMed]
- Dickinson, M.H. Wing rotation and the Aerodynamic Basis of Insect Flight. Science 1999, 284, 1954–1960. [Google Scholar] [CrossRef] [PubMed]
- Bergou, A.J.; Xu, S.; Wang, J. Passive wing pitch reversal in insect flight. J. Fluid Mech. 2007, 591, 321–337. [Google Scholar] [CrossRef]
- Whitney, J.P.; Wood, R.J. Aerodynamics of passive rotation in flapping flight. J. Fluid Mech. 2010, 60, 197–220. [Google Scholar] [CrossRef]
- McIntosh, S.H.; Agrawal, S.K.; Khan, Z. Design of a Mechanism for Biaxial Rotation of a Wing for a Hovering Vehicle. IEEE/ASME Trans. Mechatron. 2006, 11, 145–153. [Google Scholar] [CrossRef]
- Fenelon, M.A.A.; Furukawa, T. Design of an active flapping wing mechanism and a micro aerial vehicle using a rotary actuator. Mech. Mach. Theory 2010, 45, 137–146. [Google Scholar] [CrossRef]
- Karásek, M.; Hua, A.; Nan, Y.; Lalami, M.; Preumont, A. Pitch and Roll Control Mechanism for a Hovering Flapping Wing MAV. Int. J. Micro Air Veh. 2014, 6, 253–264. [Google Scholar] [CrossRef] [Green Version]
- Nguyen, Q.V.; Park, H.C.; Goo, N.S.; Byun, D. Characteristics of a Beetle’s Free Flight and a Flapping-Wing system that Mimics Beetle Flight. J. Bionic Eng. 2010, 7, 77086. [Google Scholar] [CrossRef]
- Karásek, M. Robotic Hummingbird: Design of a Control Mechanism for a Hovering Flapping Wing Micro Air Vehicle. Ph.D. Thesis, Department of Mechanical, Engineering and Robotics, Delft University, Delft, The Netherlands, 2014. [Google Scholar]
- Wang, H.; Zeng, L.; Liu, H.; Yin, C. Measuring wing kinematics, flight trajectory and body attitude during forward flight and turning maneuvers in dragonflies. J. Exp. Biol. 2003, 206, 745–757. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Azuma, A.; Azuma, S.; Watanabe, I.; Furuta, T. Flight Mechanics of a Dragonfly. J. Exp. Biol. 1985, 116, 79–107. [Google Scholar]
- Okamoto, M.; Yasuda, K.; Azuma, A. Aerodynamic Characteristics of the Wings and Body of a Dragonfly. J. Exp. Biol. 1996, 199, 281–294. [Google Scholar] [PubMed]
- Hu, Z.; McCauley, R.; Schaeffer, S.; Deng, X. Aerodynamics of Dragonfly Flight and Robotic Design. In Proceedings of the 2009 IEEE International Conference on Robotics and Automation (ICRA), Kobe, Japan, May 12–17 May 2009; pp. 3061–3066. [Google Scholar]
- Koehler, C.; Lisang, Z.; Gaston, Z.; Wan, H.; Dong, H. 3D reconstruction and analysis of wing deformation in free-flying dragonflies. J. Exp. Biol. 2012, 215, 3018–3027. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Agrawal, A.; Agrawal, S.K. Design of Bio-inspired Flexible Wings for Flapping-Wing Micro-sized Air Vehicle Applications. Adv. Robot. 2009, 23, 979–1002. [Google Scholar] [CrossRef]
- Du, G.; Sun, M. Effects of wing deformation on aerodynamic forces in hovering hoverflies. J. Exp. Biol. 2010, 213, 2273–2283. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Pelletier, A.; Mueller, T.J. Low Reynolds Number Aerodynamics of Low-Aspect_Ratio, Thin/Flat/Cambered-Plat Wings. J. Aircr. 2000, 37, 825–832. [Google Scholar] [CrossRef]
- Caetano, J.V.; Percin, M.; van Oudheusden, B.W.; Remes, B.; de Wagter, C.; de Croon, G.C.H.E.; de Visser, C.C. Error Analysis and Assessment of Unsteady Forces Acting on a Flapping Wing Micro Air Vehicle: Free-Flight versus Wind Tunnel Experimental Methods. Bioinspir. Biomim. 2015, 10, 056004. [Google Scholar] [CrossRef] [PubMed]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Angle of Attack | Stroke Amplitude | Stroke Angle | |||
|---|---|---|---|---|---|
| Angle | Hover | Forward | −40°~40° | 60° | |
| Down stroke | 75° | 45° | |||
| Up stroke | 15° | 45° | |||
| Mean angle of attack | 30° | 0° | |||
| Design Parameters | |||||
|---|---|---|---|---|---|
| Value | 6 mm | 6 mm | 12.62 mm | 72.97° | 13 mm |
| 6 mm | 26.8 mm | 9.331 mm | −4.43 mm | 26.67 mm | 76.85°~103.1° | 79.46°~84.19° | −40°~39.91° |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jang, J.H.; Yang, G.-H. Design of Wing Root Rotation Mechanism for Dragonfly-Inspired Micro Air Vehicle. Appl. Sci. 2018, 8, 1868. https://doi.org/10.3390/app8101868
Jang JH, Yang G-H. Design of Wing Root Rotation Mechanism for Dragonfly-Inspired Micro Air Vehicle. Applied Sciences. 2018; 8(10):1868. https://doi.org/10.3390/app8101868
Chicago/Turabian StyleJang, Jae Hyung, and Gi-Hun Yang. 2018. "Design of Wing Root Rotation Mechanism for Dragonfly-Inspired Micro Air Vehicle" Applied Sciences 8, no. 10: 1868. https://doi.org/10.3390/app8101868