A State-of-the-Art Review on Robots and Medical Devices Using Smart Fluids and Shape Memory Alloys



Abstract
:1. Introduction
2. Robots Using ERF and MRF
2.1. Material Characteristics
2.2. ERF-Based Robots
2.3. MRF-Based Robots
3. Robots Using SMA
3.1. Material Characteristics
3.2. SMA-Based Robots
4. Medical and Rehabilitation Applications
5. Conclusions and Future Direction
Author Contributions
Funding
Conflicts of Interest
References
- Gandhi, M.V.; Thompson, B.S.; Choi, S.B.; Shakir, S. Electro-rheological-fluid-based articulating robotic systems Transactions of the ASME-Mechanisms. Transm. Autom. Des. 1989, 111, 328–336. [Google Scholar] [CrossRef]
- Choi, S.B. Control of Single-Link Flexible Manipulators Fabricated from Advanced Composite Laminates and Smart Materials Incorporating Electro-Rheological Fluids. Ph.D. Thesis, Department of Mechanical Engineering, Michigan State University, East Lansing, MI, USA, 1990. [Google Scholar]
- Choi, S.B.; Thompson, B.S.; Gandhi, M.V. Experimental control of a single-link flexible arm incorporating electrorheological fluids. J. Guid. Control Dyn. 1995, 18, 916–919. [Google Scholar] [CrossRef]
- Choi, S.B.; Han, S.; Kim, H.K.; Cheong, C.C. H-infinity control of a flexible gantry robot arm using smart actuators. Mechatronics 1999, 9, 271–286. [Google Scholar] [CrossRef]
- Han, S.S.; Choi, S.B.; Kim, J.H. Position control of a flexible gantry robot arm using smart material actuators. J. Robot. Syst. 1999, 16, 581–595. [Google Scholar] [CrossRef]
- Monkman, G.J. An electrorheological tactile display. Presence Mass. Inst. Technol. 1992, 1, 219–228. [Google Scholar] [CrossRef]
- Shafer, A.S.; Kermani, M.R. On the feasibility and suitability of MR and ER based actuators in human friendly manipulators. In Proceedings of the 2009 IEEE/RSJ Ternational Conference on Intelligent Robots and Systems, St. Louis, IL, USA, 11–15 October 2009. [Google Scholar]
- LORD Company. Available online: http://www.lord.com/ (accessed on 1 July 2018).
- Choi, S.B.; Han, Y.M. Magnetorheological Fluid Technology: Applications in Vehicle Systems Taylor & Francis Group; CRC Press: Boca Raton, FL, USA, 2012. [Google Scholar]
- Kordonsky, W.I.; Gorodkin, S.R.; Kolomentsev, A.V.; Kuzmin, V.A.; Luk’ianovich, A.V.; Protasevich, N.A.; Prokhorov, I.V.; Shulman, Z.P.; Byelocorp Scientific Inc. Magnetorheological Valve and Devices Incorporating Magnetorheological Elements. U.S. Patent No. 5353839, 11 October 1994. [Google Scholar]
- Yadmellat, P.; Kermani, M.R. Adaptive Control of a Hysteretic Magneto-rheological robot actuator. IEEE/ASME Trans. Mechatron. 2016, 21, 1336–1344. [Google Scholar] [CrossRef]
- Jolly, M.R.; Bryan, S.R. Magnetorheological Grip for Handheld Implements. U.S. Patent No. 6158910, 12 December 2000. [Google Scholar]
- Pattersson, A.; Davis, S.; Gray, J.O.; Dodd, T.J.; Ohlsson, T. Design of a magnetorheological robot gripper for handling of delicate food products with varying shapes. J. Food Eng. 2010, 98, 332–338. [Google Scholar] [CrossRef]
- Nguyen, Q.H.; Choi, S.B.; Lee, Y.S.; Han, M.S. Optimal design of a new 3D haptic gripper for telemanipulation, featuring magnetorheological fluid brakes. Smart Mater. Struct. 2013, 22, 015009. [Google Scholar] [CrossRef]
- Scilingo, E.P.; Sgambelluri, N.; Rossi, D.; Bicchi, A. A Towards a haptic black box for free-hand softness and shape exploration. In Proceedings of the 2003 IEEE International Conference on Robotics and Automation, Taipei, Taiwan, 14–19 September 2003. [Google Scholar]
- Blake, J.; Gurocak, H.B. Haptic glove with MT brakes for virtual reality. IEEE/ASME Tans. Mechatron. 2009, 14, 606–615. [Google Scholar] [CrossRef]
- Ahmadkhanlou, F.; Washington, G.N.; Bechtel, S.E. The development of a five DOF magnetorheological fluid-based telerobotic haptic system. In Proceedings of the Modeling, Signal Processing, and Control for Smart Structures, San Diego, CA, USA, 9–12 March 2008; Volume 692604. [Google Scholar] [CrossRef]
- Walker, D.S.; Thoma, D.J.; Niemeyer, G. Variable impedence magnetorheological clutch actuator and telerobotic implementation. In Proceedings of the 2009 IEEE/RSJ International Conference on Intelligent Robots and Systems, St. Louis, IL, USA, 11–15 October 2009; pp. 2885–2891. [Google Scholar]
- Diaz, I.; Gill, J.J.; Sanchez, E. Lower-limb robotic rehabilitation:literature review and challenges. J. Robot. 2011, 2011, 759764. [Google Scholar] [CrossRef]
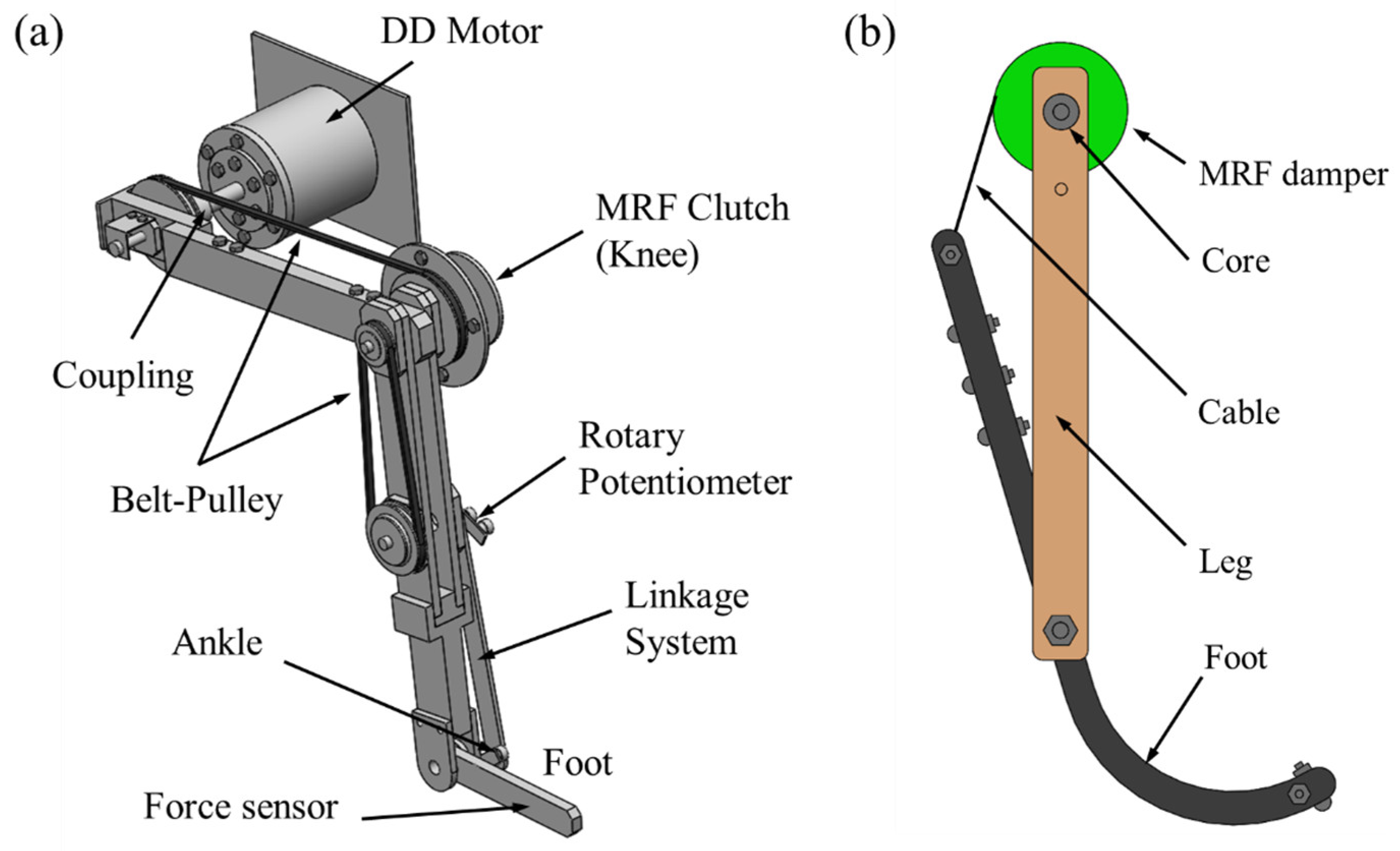
- Kikuchi, T.; Oda, K.; Yamaguchi, S.; Furusho, J. Leg-robot with MR clutch to realize virtual spastic movements. J. Intell. Mater. Syst. Struct. 2010, 21, 1523–1529. [Google Scholar] [CrossRef]
- Kikuchi, T.; Oda, K.; Furusho, J. Leg-robot for demonstration of spastic movements of brain-injured patients with compact megnetorheological fluid clutch. Adv. Robot. 2010, 24, 671–686. [Google Scholar] [CrossRef]
- Jiang, N.; Sun, S.; Ouyang, Y.; Xu, M.; Li, W.; Zhang, S. A highly adaptive magnetorheological fluid robotic leg for efficient terrestrial locomotion. Smart Mater. Struct. 2016, 25, 095019. [Google Scholar] [CrossRef] [Green Version]
- Saito, T.; Ikeda, H. Development of normally closed type of magnetorheological clutch and its application to safe torque control system of human-collaborative robot. J. Intell. Mater. Syst. Struct. 2007, 18, 1181–1185. [Google Scholar] [CrossRef]
- Ahmed, R.M.; Kalaykov, I.G.; Ananiev, A.V. Modeling of magneto rheological fluid actuator enabling safe human-robot interaction. In Proceedings of the IEEE International Conference on Emerging Technologies and Factory Automation, Hamburg, Germany, 15–18 September 2008. [Google Scholar] [CrossRef]
- Ahmed, M.R.; Kalaykov, I. Semi-active compliant robot enabling collision safety for human robot interaction. In Proceedings of the 2010 IEEE International Conference on Mechatronics and Automation, Xi’an, China, 4–7 August 2010. [Google Scholar]
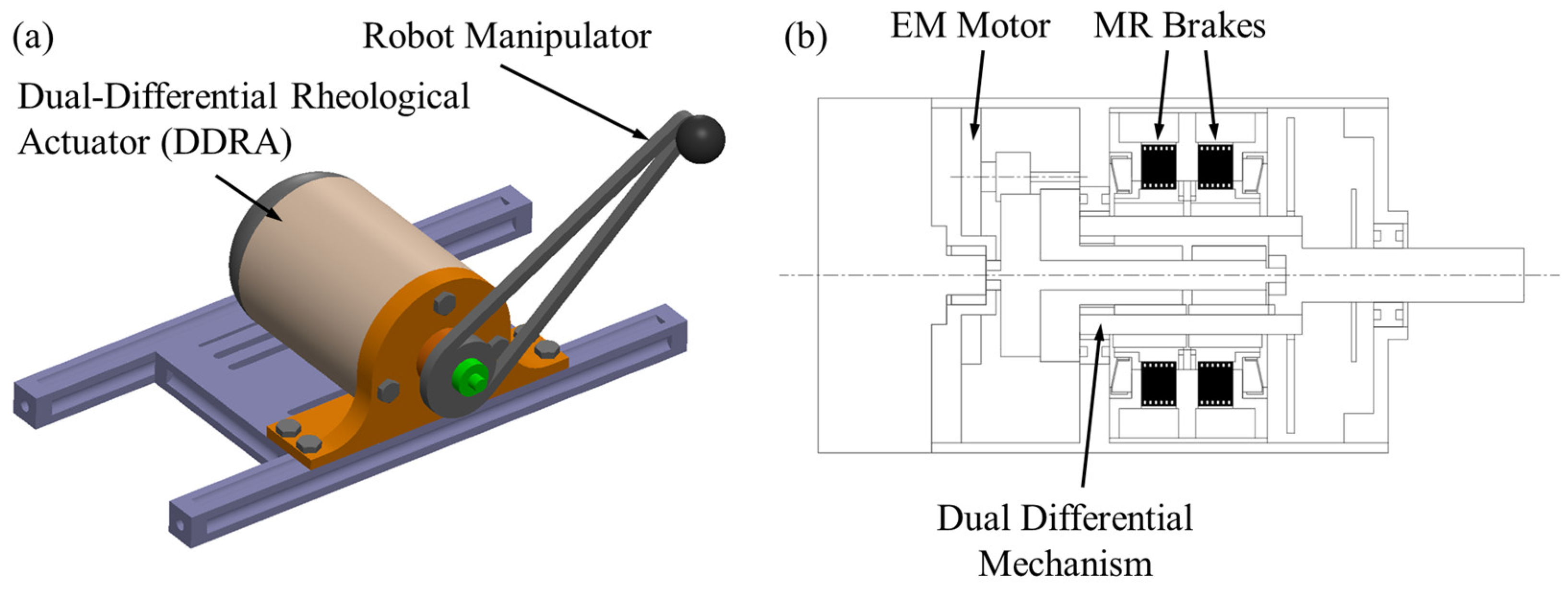
- Fauteux, P.; Lauria, M.; Heintz, B.; Michaud, F. Dual-differential rheological actuator for high-performance physical robotic interaction. IEEE Trans. Robot. 2010, 26, 607–618. [Google Scholar] [CrossRef]
- Shafer, A.; Kermani, M.R. Design and validation of a magneto-rheological clutch for practical control application in human-friendly manipulation. In Proceedings of the 2011 IEEE International Conference on Robotics and Automation, Shanghai, China, 9–13 May 2011. [Google Scholar]
- Shafer, A.; Kermani, M.R. On the feasibility and suitability of MR fluid clutches in human-friendly manipulators. IEEE/ASME Trans. Mechatron. 2011, 16, 1073–1082. [Google Scholar] [CrossRef]
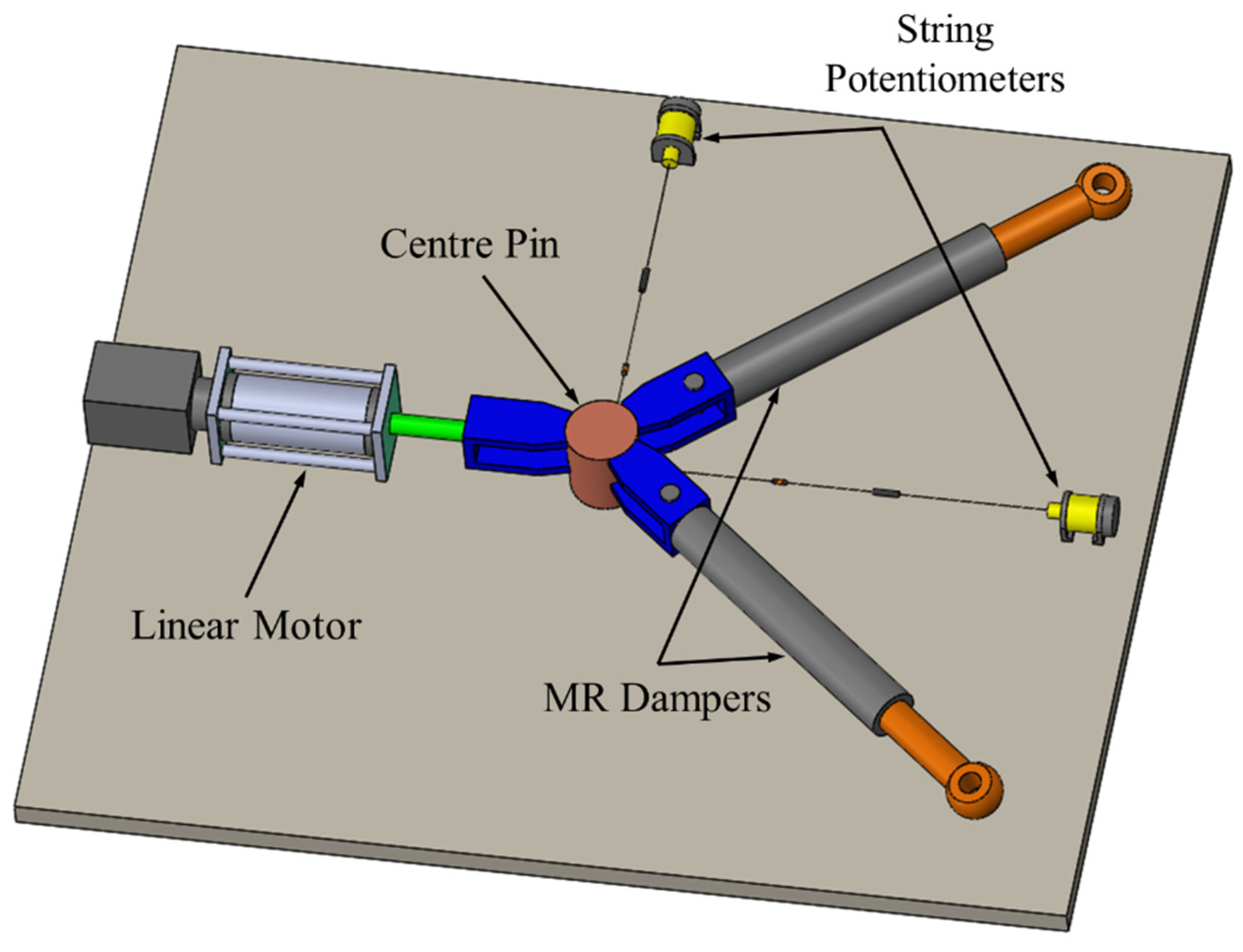
- Hoyle, A.; Arzanpour, S.; Shen, Y. A novel magnetorheological damper based parallel planar manipulator design. Smart Mater. Struct. 2010, 19, 055028. [Google Scholar] [CrossRef]
- Wiltsie, N. A Controllably Adhesive Climbing Robot Using Magnetorheological Fluid. Masters’ Thesis, Department of Mechanical Engineering, Massachusetts Institute of Technology, Cambridge, MA, USA, September 2012. [Google Scholar]
- Yue, M.; Liu, B.Y. Design of adaptive sliding mode control for spherical robot based on MR fluid actuator. J. Vibroeng. 2012, 14, 196–204. [Google Scholar]
- Schmitz, G.W. Hydraulically Energized Magnetorheological Replicant Muscle Tissue and System and a Method for Using and Controlling Same. U.S. Patent No. 6168634, 2 January 2001. [Google Scholar]
- Kashima, S.; Miyasaka, F.; Hirata, K. Novel soft actuator using magnetorheological elastomer. IEEE Trans. Magn. 2012, 48, 1649–1652. [Google Scholar] [CrossRef]
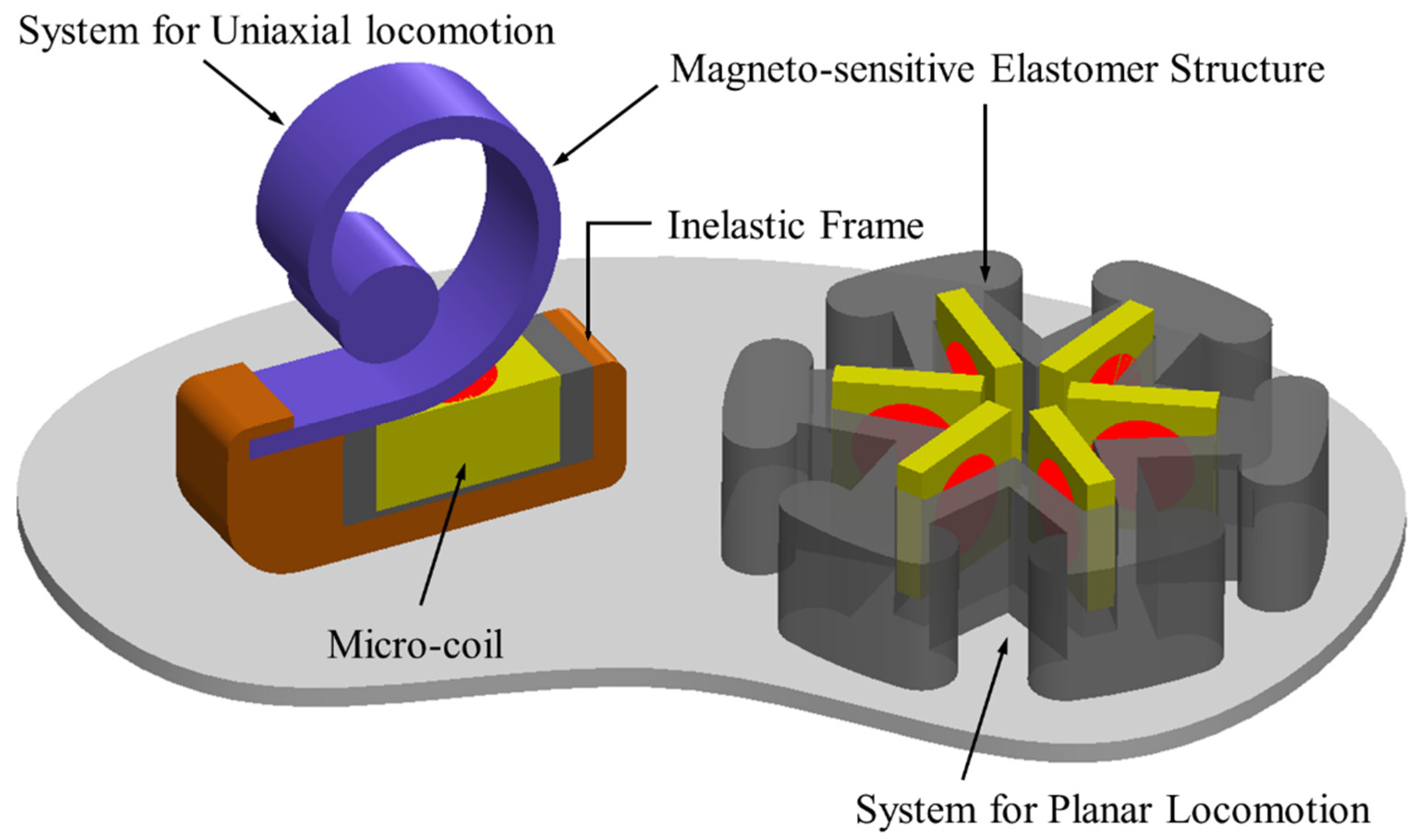
- Zimmermann, K.; Bohm, V.; Zeidis, I. Vibration-driven mobile robot based on magneto-sensitive elastomers. In Proceedings of the 2011 IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Budapest, Hungary, 3–7 July 2011. [Google Scholar]
- Flexible Solutions. Available online: http://www.dynalloy.com (accessed on 10 July 2018).
- Sun, L.; Huang, W.M.; Ding, Z.; Zhao, Y.; Wang, C.C.; Purnawali, H.; Tang, C. Stimulus-responsive shape memory materials: A review. Mater. Des. 2012, 33, 577–640. [Google Scholar] [CrossRef]
- Jani, J.M.; Leary, M.; Subic, A.; Gibson, M.A. A review of shape memory alloy research, applications and opportunities. Mater. Des. 2014, 56, 1078–1113. [Google Scholar] [CrossRef]
- Follador, M.; Cianchetti, M.; Arienti, A.; Laschi, C. A general method for the design and fabrication of shape memory alloy active spring actuators. Smart Mater. Struct. 2012, 21, 115029. [Google Scholar] [CrossRef]
- An, S.; Ryu, J.; Cho, M.; Cho, K. Engineering design framework for a shape memory alloy coil spring actuator using a static two-state model. Smart Mater. Struct. 2012, 21, 055009. [Google Scholar] [CrossRef]
- Flemming, L.; Mascaro, S. Analysis of hybrid electric/thermofluidic inputs for wet shape memory alloy actuators. Smart Mater. Struct. 2013, 22, 014015. [Google Scholar] [CrossRef]
- Zhang, X.; Hu, J.; Mao, S.; Dong, E.; Yang, J. Design and property analysis of a hybrid linear actuator based on shape memory alloy. Smart Mater. Struct. 2014, 23, 125004. [Google Scholar] [CrossRef]
- Leng, J.; Yan, X.; Zhang, X.; Huang, D.; Gao, Z. Design of a novel flexible shape memory alloy actuator with multilayer tubular structure for easy integration into a confined space. Smart Mater. Struct. 2016, 25, 025007. [Google Scholar] [CrossRef]
- Shim, J.; Quan, Y.; Wang, W.; Rodrigue, H.; Song, S.; Ahn, S.H. A smart soft actuator using a single shape memory alloy for twisting actuation. Smart Mater. Struct. 2015, 24, 125033. [Google Scholar] [CrossRef]
- Sheng, J.; Desai, J.P. Design, modeling and characterization of a novel meso-scale SMA-actuated torsion actuator. Smart Mater. Struct. 2015, 24, 105005. [Google Scholar] [CrossRef]
- Rodrigue, H.; Wei, W.; Bhandari, B.; Ahn, S.H. Fabrication of wrist-like SMA-based actuator by double smart soft composite casting. Smart Mater. Struct. 2015, 24, 125003. [Google Scholar] [CrossRef]
- Paik, J.K.; Hawkes, E.; Wood, R.J. A novel low-profile shape memory alloy torsional actuator. Smart Mater. Struct. 2010, 19, 125014. [Google Scholar] [CrossRef]
- Paik, J.K.; Wood, R.J. A bidirectional shape memory alloy folding actuator. Smart Mater. Struct. 2012, 21, 065013. [Google Scholar] [CrossRef]
- Shin, B.H.; Jang, T.; Ryu, B.J.; Kim, Y. A modular torsional actuator using shape memory alloy wires. J. Intell. Mater. Syst. Struct. 2016, 12, 1658–1665. [Google Scholar] [CrossRef]
- Song, S.; Lee, J.; Rodrigue, H.; Choi, I.; Kang, Y.J.; Ahn, S.H. 35 Hz shape memory alloy actuator with bending-twisting mode. Sci. Rep. 2016, 6, 21118. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Thayer, N.; Priya, S. Design and implementation of a dexterous anthropomorphic robotic typing (DART) hand. Smart Mater. Struct. 2011, 20, 035010. [Google Scholar] [CrossRef]
- Tadesse, Y.; Hong, D.; Priya, S. Twelve Degree of Freedom Baby Humanoid Head Using Shape Memory Alloy Actuators. J. Mech. Robot. 2011, 3, 011008. [Google Scholar] [CrossRef]
- Chu, W.; Lee, K.; Song, S.; Han, M.; Lee, J.; Kim, H.; Kim, M.; Park, Y.; Cho, K.; Ahn, S.H. Review of Biomimetic Underwater Robots Using Smart Actuators. Int. J. Precis. Eng. Manuf. 2012, 13, 1281–1292. [Google Scholar] [CrossRef]
- Wang, Z.; Hang, G.; Li, J.; Wang, Y.; Xiao, K. A micro-robot fish with embedded SMA wire actuated flexible biomimetic fin. Sens. Actuators A 2008, 144, 354–360. [Google Scholar] [CrossRef]
- Wang, Z.; Hang, G.; Wang, Y.; Li, J.; Du, W. Embedded SMA wire actuated biomimetic fin: A module for biomimetic underwater propulsion. Smart Mater. Struct. 2008, 17, 025039. [Google Scholar] [CrossRef]
- Rossi, C.; Colorado, J.; Coral, W.; Barrientos, A. Bending continuous structures with SMAs: A novel robotic fish design. Bioinspir. Biomim. 2011, 6, 045005. [Google Scholar] [CrossRef] [PubMed]
- Yuk, H.; Kim, D.; Lee, H.; Jo, S.; Shin, J.H. Ketner Shape memory alloy-based small crawling robots inspired by C. elegans. Bioinspir. Biomim. 2011, 6, 046002. [Google Scholar] [CrossRef] [PubMed]
- Jin, H.; Dong, E.; Xu, M.; Liu, C.; Alici, G.; Jie, Y. Soft and smart modular structures actuated by shape memory alloy (SMA) wires as tentacles of soft robots. Smart Mater. Struct. 2016, 25, 085026. [Google Scholar] [CrossRef]
- Jin, H.; Dong, E.; Alici, G.; Mao, S.; Min, X.; Liu, C.; Low, K.H.; Yang, J. A starfish robot based on soft and smart modular structure (SMS) actuated by SMA wires. Bioinspir. Biomim. 2016, 11, 056012. [Google Scholar] [CrossRef] [PubMed]
- Villanueva, A.; Smith, C.; Priya, S.A. A biomimetic robotic jellyfish (Robojelly) actuated by shape memory alloy composite actuators. Bioinspir. Biomim. 2011, 6, 036004. [Google Scholar] [CrossRef] [PubMed]
- Marut, K.; Stewart, C.; Michael, T.; Villanueva, A.; Priya, S. A jellyfish-inspired jet propulsion robot actuated by an iris mechanism. Smart Mater. Struct. 2013, 22, 094021. [Google Scholar] [CrossRef]
- Kim, H.; Song, S.; Ahn, S.H. A turtle-like swimming robot using a smart soft composite (SSC) structure. Smart Mater. Struct. 2013, 22, 014007. [Google Scholar] [CrossRef]
- Song, S.; Kim, M.; Rodrigue, H.; Lee, J.; Shim, J.; Kim, M.; Chu, W.; Ahn, S.H. Turtle mimetic soft robot with two swimming gaits. Bioinspir. Biomim. 2016, 11, 036010. [Google Scholar] [CrossRef] [PubMed]
- Wang, W.; Lee, J.; Rodrigue, H.; Song, S.; Chu, W.; Ahn, S.H. Locomotion of inchworm-inspired robot made of smart soft composite (SSC). Bioinspir. Biomim. 2014, 9, 046006. [Google Scholar] [CrossRef] [PubMed]
- Zhang, K.; Qiu, C.; Dai, J.S. Helical kirigami-enabled centimeter-scale worm robot with shape-memory-alloy linear actuators. J. Mech. Robot. 2015, 7, 021014. [Google Scholar] [CrossRef]
- Kim, S.; Koh, J.; Lee, J.; Ryu, J.; Cho, M.; Cho, K. Flytrap-inspired robot using structurally integrated actuation based on bistability and a developable surface. Bioinspir. Biomim. 2014, 9, 036004. [Google Scholar] [CrossRef] [PubMed]
- Jung, G.; Cho, K. Froghopper-inspired direction-changing concept for miniature jumping robots. Bioinspir. Biomim. 2016, 11, 056015. [Google Scholar] [CrossRef] [PubMed]
- Colorado, J.; Barrientos, A.; Rossi, C.; Bahlman, J.W.; Breuer, K.S. Biomechanics of smart wings in a bat robot: Morphing wings using SMA actuators. Bioinspir. Biomim. 2013, 7, 036006. [Google Scholar] [CrossRef] [PubMed]
- Festo. BionicOpter—Inspired by Dragonfly Flight; Festo: Esslingen am Neckar, Germany, 2013. [Google Scholar]
- Dimitris, C.L. Shape Memory Alloys: Modeling and Engineering Applications; Springer: Berlin, Germany, 2008. [Google Scholar]
- Mohammad, H.E.; Hashem, A. Nonlinear control of a shape memory alloy actuated manipulator. J. Vib. Acoust. 2002, 124, 566–575. [Google Scholar]
- Price, A.D.; Jenifene, A.; Naguib, H.E. Design and control of a shape memory alloy based dexterous robot hand. Smart Mater. Struct. 2007, 16, 1401. [Google Scholar] [CrossRef]
- Choi, S.B. Position control of a single-link mechanism activated by shape memory alloy springs: Experimental results. Smart Mater. Struct. 2006, 15, 51. [Google Scholar] [CrossRef]
- Taril, N.T.; Ahn, K.K. Adaptive proportional–integral–derivative tuning sliding mode control for a shape memory alloy actuator. Smart Mater. Struct. 2011, 20, 055010. [Google Scholar]
- Hannen, J.C.; Crews, J.H.; Buckner, G.D. Indirect intelligent sliding mode control of a shape memory alloy actuated flexible beam using hysteretic recurrent neural networks. Smart Mater. Struct. 2012, 21, 085015. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Lee, H.J.; Lee, J.J. Time delay control of a shape memory alloy actuator. Smart Mater. Struct. 2004, 13, 227. [Google Scholar] [CrossRef]
- Ma, N.; Song, G. Control of shape memory alloy actuator using pulse width modulation. Smart Mater. Struct. 2003, 12, 712. [Google Scholar] [CrossRef]
- A Revolution In Motion! Available online: http://migamotors.com/ (accessed on 20 July 2018).
- Selden, B.; Cho, K.; Asada, H.H. Segmented shape memory alloy actuators using hysteresis loop control. Smart Mater. Struct. 2006, 15, 642. [Google Scholar] [CrossRef]
- Ma, N.; Song, G.; Lee, H.-J. Position control of shape memory alloy actuators with internal electrical resistance feedback using neural networks. Smart Mater. Struct. 2004, 13, 777. [Google Scholar] [CrossRef]
- Lynch, B.; Jiang, X.X.; Ellery, A.; Nitzsche, F. Characterization, modeling, and control of Ni-Ti shape memory alloy based on electrical resistance feedback. J. Intell. Mater. Syst. Struct. 2016, 27, 2489–2507. [Google Scholar] [CrossRef]
- Nagai, H.; Oishi, R. Shape memory alloys as strain sensors in composites. Smart Mater. Struct. 2006, 15, 493. [Google Scholar] [CrossRef]
- Weinberg, B.; Nikitczuk, J.; Patel, S.; Patritti, B.; Mavroidis, C.; Bonato, P.; Canavan, P. Design, Control and Human Testing of an Active Knee Rehabilitation Orthotic Device. In Proceedings of the 2007 IEEE International Conference on Robotics and Automation, Roma, Italy, 10–14 April 2007; pp. 4126–4133. [Google Scholar]
- Nikitczuk, J.; Weinberg, B.; Canavan, P.K.; Mavroidis, C. Active knee rehabilitation orthotic device with variable damping characteristics implemented via an electrorheological fluid. IEEE/ASME Trans. Mechatron. 2010, 15, 952–960. [Google Scholar] [CrossRef]
- Kim, J.H.; Oh, J.H. Development of an above knee prosthesis using MR damper and leg simulator. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Seoul, Korea, 21–26 May 2001; pp. 43686–43691. [Google Scholar]
- Park, J.; Yoon, G.H.; Kang, J.W.; Choi, S.B. Design and control of a prosthetic leg for above-knee amputees operated in semi-active and active modes. Smart Mater. Struct. 2016, 25, 085009. [Google Scholar] [CrossRef]
- Furusho, J.; Kikuchi, T.; Tokuda, M.; Kakehashi, T.; Ikeda, K.; Morimoto, S.; Hashimoto, Y.; Tomiyama, H.; Nakagawa, A.; Akazawa, Y. Development of shear type compact MR brake for the intelligent ankle-foot orthosis and its control; research and development in NEDO for practical application of human support robot. In Proceedings of the IEEE 10th International Conference on Rehabilitation Robotics (ICORR), Noordwijk, The Netherlands, 12–15 June 2007; pp. 89–94. [Google Scholar]
- Kikuchi, T.; Tanida, S.; Otsuki, K.; Yasuda, T.; Furusho, J. Development of third-generation intelligently controllable ankle-foot orthosis with compact MR fluid brake. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Anchorage, Alaska, 3–8 May 2010; pp. 2209–2214. [Google Scholar]
- Avraam, M.; Horodinca, P.; Leiter, P.; Preumont, A. Portable Smart Wrist Rehabilitation Device driven by rotational MR-fluid brake actuator for telemedicine application. In Proceedings of the International Conference on Intelligent Robots and Systems, Nice, France, 22–26 September 2008; pp. 1441–1446. [Google Scholar]
- Egawa, M.; Watanabe, T.; Nakamura, T. Development of a wearable haptic device with pneumatic artificial muscles and MR brake. In Proceedings of the IEEE Virtual Reality Conference 2015, Minneapolis, MN, USA, 29 March–2 April 2015; pp. 173–174. [Google Scholar]
- Matsubara, S.; Okamoto, S.; Lee, J. Prosthetic hand using shape memory alloy type artificial muscle. In Proceedings of the International MultiConference of Engineers and Computer Scientists, Hong Kong, China, 14–16 March 2012; Volume 2, pp. 873–876. [Google Scholar]
- Kaplanoglu, E. Design of shape memory alloy-based and tendon-driven actuated fingers towards a hybrid anthropomorphic prosthetic hand. Int. J. Adv. Robot. Syst. 2012, 9, 77. [Google Scholar] [CrossRef]
- Kode, V.R.C.; Cavusoblu, M.C.; Azar, M.T. Design and characterization of a novel hybrid actuator using shape memory alloy and D.C motor for minimally invasive surgery applications. In Proceedings of the IEEE International Conference on Mechatronics and Automation 2005, Niagara Falls, ONT, Canada, 29 July–1 August 2005; pp. 416–420. [Google Scholar]
- Giataganas, P.; Evangeliou, N.; Koveos, Y.; Kelasidi, E.; Tzes, A. Design and experimental evaluation of an innovative SMA-based tendon-driven redundant endoscopic robotic surgical tool. In Proceedings of the 19th Mediterranean Conference on Control and Automation 2011, Corfu, Greece, 20–23 June 2011; pp. 1071–1075. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Robot | References |
|---|---|
| Flexible robot arm | [1,2,3] |
| Flexible gantry robot | [4,5] |
| Tactile display | [6] |
| Manipulator | [7] |
| Robot | References |
|---|---|
| Manipulator | [11] |
| Deformable gripper | [12,13] |
| Haptic robot | [14,15,16,17,18] |
| Rehabilitation | [19,20,21,22] |
| Collaborative robot | [23,24,25,26,27,28] |
| Planar robot | [29] |
| Climbing robot | [30] |
| Spherical robot | [31] |
| Robots | Biomimetic | References |
|---|---|---|
| Micro-fish | Fish fin | [53,54,55] |
| Crawling | C. elegans | [56] |
| Tentacle | Starfish | [57,58] |
| Buoyance | Jellyfish | [59,60] |
| Swimming | Turtle | [61,62] |
| Linear | Inchworm | [63,64] |
| Flytrap | Venus flytrap | [65] |
| Jumping | Froghopper | [66] |
| Flying | Bat, Dragonfly | [67,68] |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sohn, J.W.; Kim, G.-W.; Choi, S.-B. A State-of-the-Art Review on Robots and Medical Devices Using Smart Fluids and Shape Memory Alloys. Appl. Sci. 2018, 8, 1928. https://doi.org/10.3390/app8101928
Sohn JW, Kim G-W, Choi S-B. A State-of-the-Art Review on Robots and Medical Devices Using Smart Fluids and Shape Memory Alloys. Applied Sciences. 2018; 8(10):1928. https://doi.org/10.3390/app8101928
Chicago/Turabian StyleSohn, Jung Woo, Gi-Woo Kim, and Seung-Bok Choi. 2018. "A State-of-the-Art Review on Robots and Medical Devices Using Smart Fluids and Shape Memory Alloys" Applied Sciences 8, no. 10: 1928. https://doi.org/10.3390/app8101928
APA StyleSohn, J. W., Kim, G.-W., & Choi, S.-B. (2018). A State-of-the-Art Review on Robots and Medical Devices Using Smart Fluids and Shape Memory Alloys. Applied Sciences, 8(10), 1928. https://doi.org/10.3390/app8101928