Cognitive Assistants—An Analysis and Future Trends Based on Speculative Default Reasoning



Abstract
:1. Introduction
2. Orientation Systems
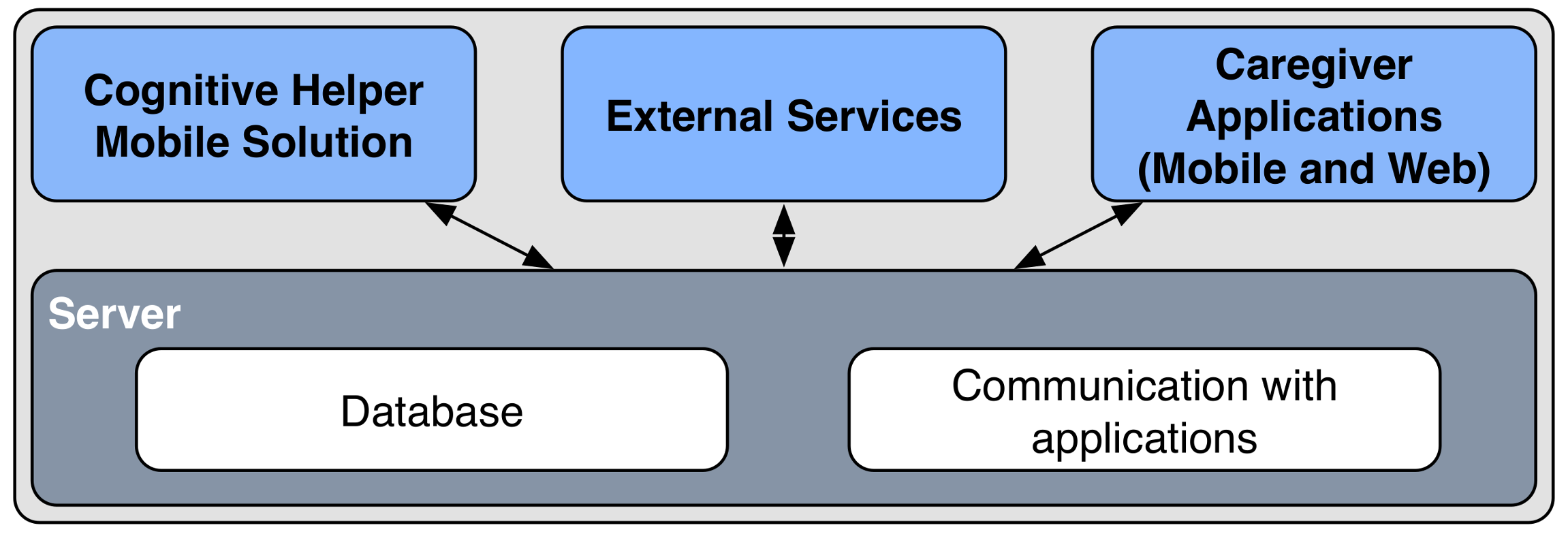
3. CogHelper—An Orientation System for People with Cognitive Disabilities
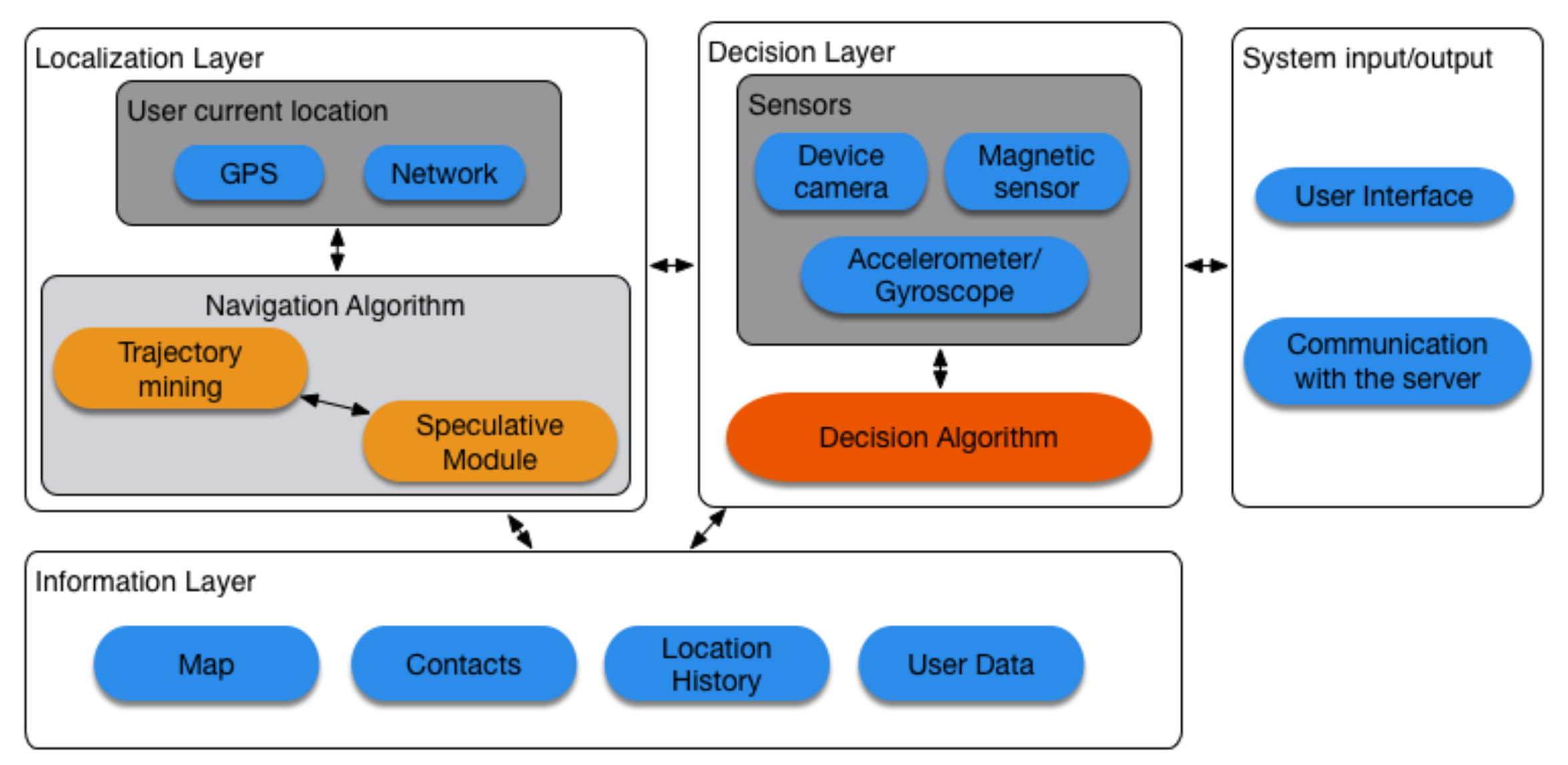
3.1. Application for People with Cognitive Disabilities
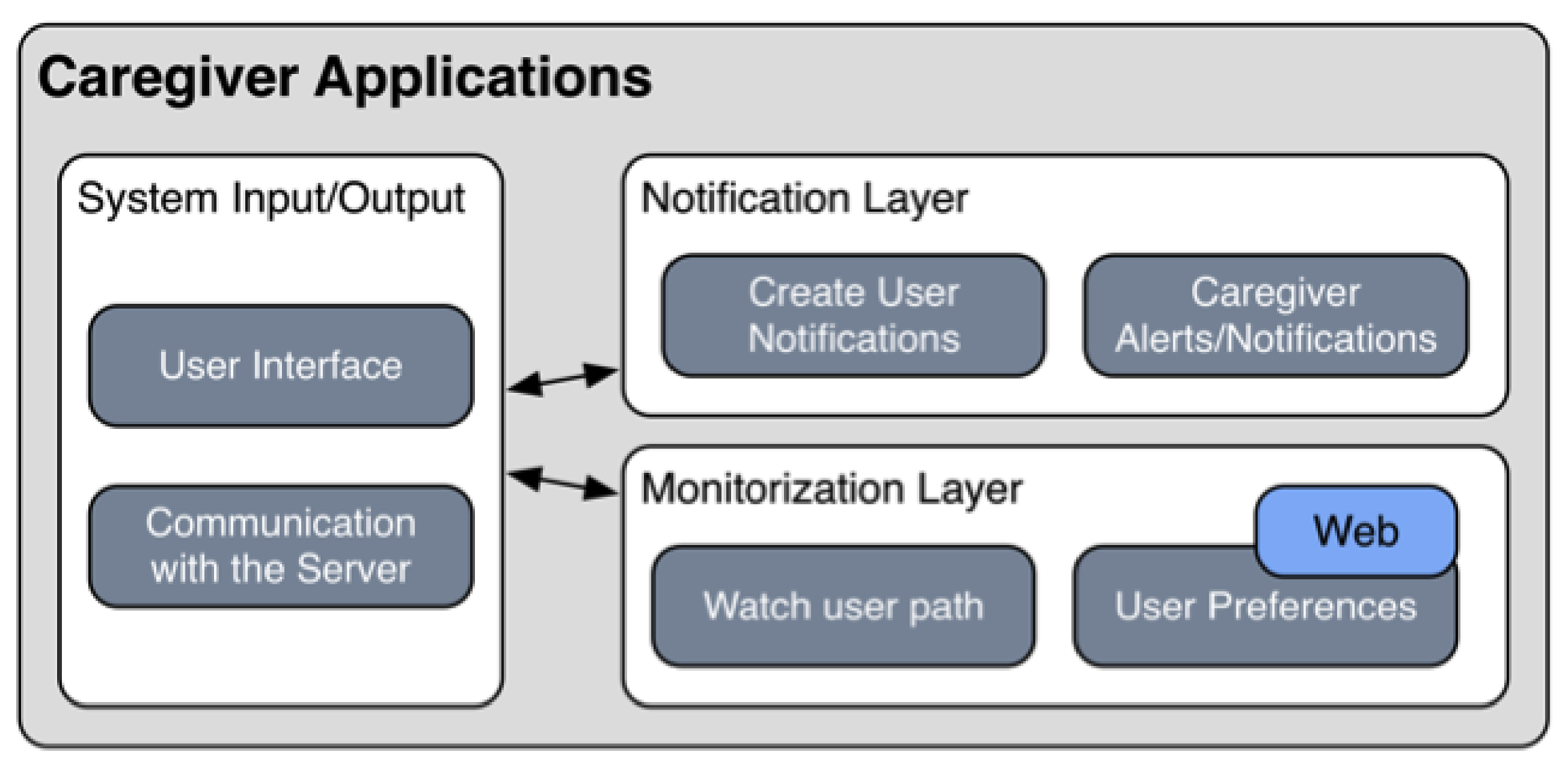
3.2. Applications for Caregivers
3.3. Ethical Issues
4. Applying Speculative Computation to an Orientation System
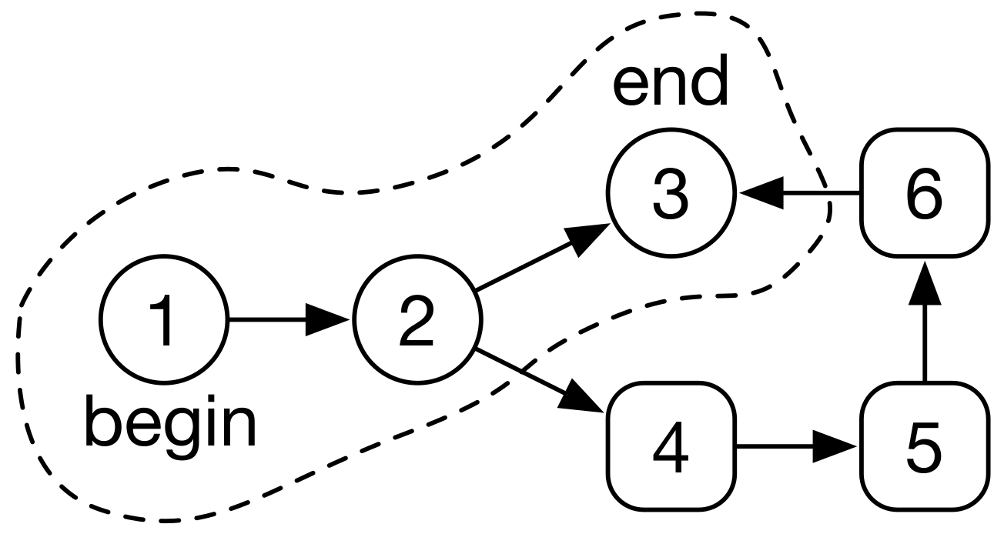
- All the possible paths between the current user location and the intended destination as facts in the knowledge base;
- The transitions between points usually performed by the user as default values;
- Information regarding the inclusion of a point in the current recommended traveling path as default values; and
- A set of rules that structure the execution of the computation regarding the most likely path that the user will follow and the issuing of alerts if a (potential) mistake happens.
4.1. The Speculative Computation Framework
- -
- stands for a finite set of constants (an element of is called a system module);
- -
- denotes a set of functions called external predicates. When Q is a literal belonging to an external predicate and S is the identifier of the information source, Q@S is called an askable literal. We define ∼(Q@S) as (∼Q)@S;
- -
- is the default answer set, which is a set of ground askable literals that satisfy the condition: does not contain both and at once;
- -
- is a set of predicates called abducible predicates. Q is called abducible when it is a literal with an abducible predicate;
- -
- is a Logic Program (LP) and contains a set of rules in the form:
- ▹
- where p is a positive ordinary literal, and each of is an ordinary literal, an askable literal or an abducible; and
- ▹
- p is the head of rule R and is named as head(P) (always non-empty), in which R is a rule of the form ; where is the body of the rule denoted as body(P), that in some situations is replaced by the boolean value true.
- -
- is a set of integrity constraints in the form:
- ▹
- , where the symbol “?” denotes “falsity”, the , , …, are ordinary literals or askable literals or abducibles. At least one of is an askable literal or an abducible.
- An askable literal Q@S in a rule stands for a question put to a system module S; and
- An askable literal in denotes a default truth value, either true or false, i.e., , is usually true for a question to a system module S, and , is generally false for a question to a system module S.
- ▹
- ▹
- ▹
- ▹
- ▹
- is the following set of rules:
- ▹
- denotes the following set of integrity constraints or invariants:
4.2. Preliminary Definitions
4.3. Process Reduction Phase
- Initial Step: Let be an initial goal set. The tuple is given to the proof procedure where is a set of variables in . That is, . Let and .
- Iteration Step: Do the following:
- ▹
- Case 1: If there is an active process with respect to in , terminate the process by returning outside defaults , inside assumptions , and instantiation for variables . This case may only be applied on the first iteration step since and are empty sets;
- ▹
- Case 2: If there is no active process, terminate the process by reporting a failure of the goal;
- ▹
- Case 3: Select an active process with respect to from and select an extended literal L in . Let and . For the selected extended literal L, do the following:
- –
- Case 3.1: If L is a positive ordinary literal, and ∃most general unifier so that .
- –
- Case 3.2: If L is a ground negative ordinary literal or a ground abducible then:
- ∗
- Case 3.2.1: If then , .
- ∗
- Case 3.2.2: If then .
- ∗
- Case 3.2.3: If then , , where and is defined as follows:
- ․
- If L is a ground negative ordinary literal, so that by a ground substitution
- ․
- If L is a ground abducible, , ⋯, , so that by a ground substitution .
- –
- Case 3.3: If L is , then
- ∗
- If , ;
- ∗
- IF , then do the following:
- (1)
- Select B from and let .
- (2)
- Case 3.3.1: If B is a positive ordinary literal, where and ∃MGU so thatCase 3.3.2: If B is a ground negative ordinary literal or a ground askable literal or an abducible, , , , .
- –
- Case 3.4: If L is a ground askable literal, , then do the following:
- (1)
- If and , then send the question Q to the slave agent S and .
- (2)
- If then else , .
4.4. Fact Arrival Phase
- If , then
- Else if , then .
4.5. Correctness of the Proof Procedure
- ▹
- When a positive literal is reduced, new processes are created according to the rule order in the program, which are unifiable with the positive literal;
- ▹
- A newly created or newly resumed process and the most left literal is always selected.
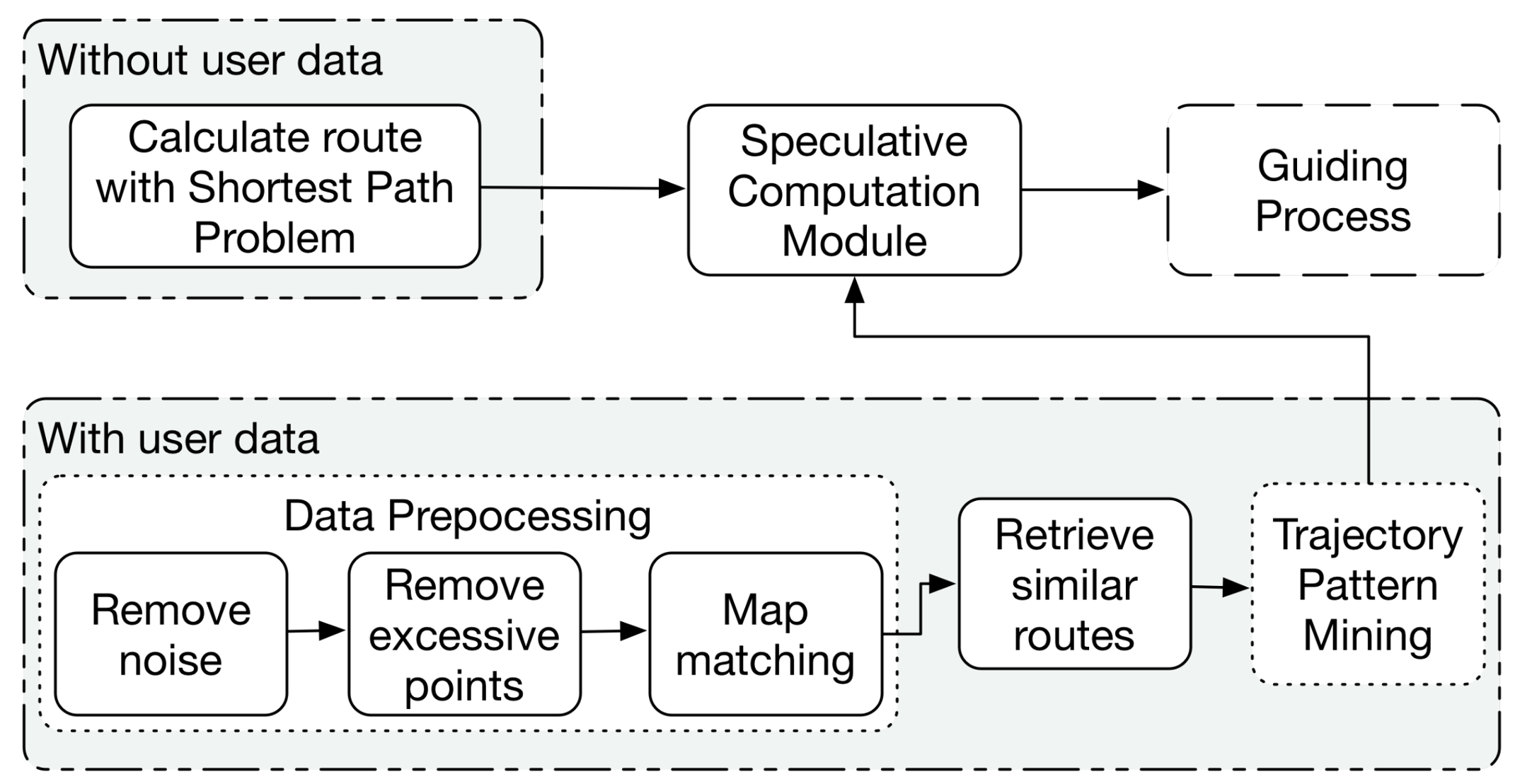
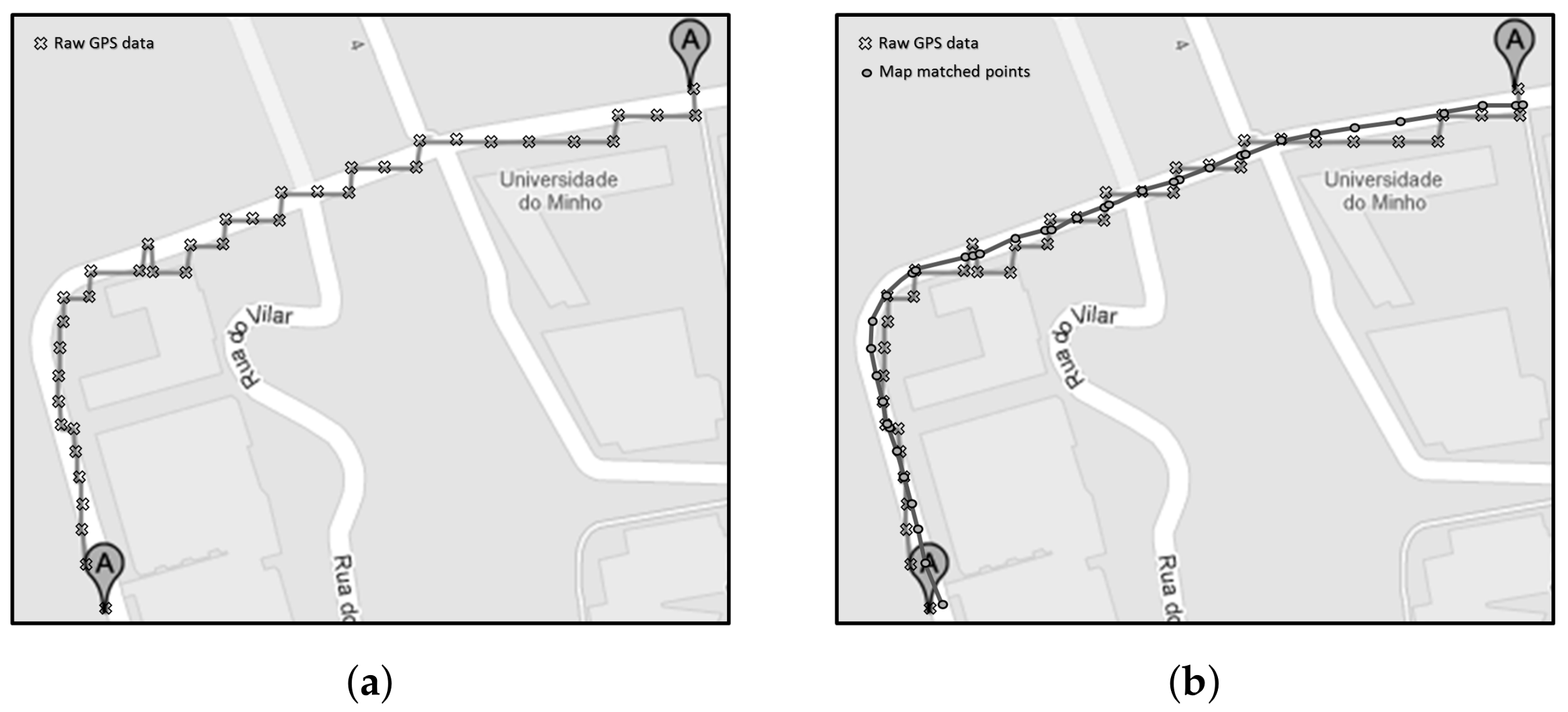
5. Applying Trajectory Pattern Mining to Adapt the Path
6. Conclusions
Author Contributions
Acknowledgments
Conflicts of Interest
Appendix A. Execution Example of the Speculative Computation Framework
| 1. |
| 2. By Case 3.1 |
| 3. By Case 3.1 |
| 4. By Case 3.2.3 |
| 5. By Case 3.3.2 |
| 6. By Case 3.3 |
| 7. By Case 3.4 |
| is asked to the sensorr |
| 8. By Case 3.4 |
| is asked to the sensorg |
| 9. By Case 3.1 |
| 10. By Case 3.1 |
| 11. is returned from g |
| Nothing changes. |
| 12. By Case 3.2.3 |
| 13. By Case 3.3.2 |
| 14. By Case 3.3 |
| 15. By Case 3.4 |
| is asked to the sensorr |
| 16. By Case 3.4 |
| is asked to the sensorg |
| 17. By Case 3.1 |
| 18. By Case 3.2.3 |
| 19. By Case 3.3.2 |
| 20. By Case 3.3 |
| 21. By Case 3.4 |
| is asked to the sensorr |
| 22. |
| has already been asked to the sensorg |
| 23. By Case 3.2.3 |
| 24. By Case 3.3.2 |
| 25. By Case 3.3 |
| 26. |
| has already been asked to the sensorr |
| 27. By Case 3.4 |
| is asked to the sensorg |
| … |
| 28. By Case 3.2.3 |
| 29. By Case 3.3.2 |
| 30. By Case 3.3 |
| 31. |
| has already been asked to the sensorr |
| 32. is returned from g |
| Nothing changes. |
| 33. is returned from g |
| By Fact Arrival Phase: |
| 34. |
| and |
| are returned as outside defaults and inside assumptions. |
References
- American Psychiatric Association. Diagnostic and Statistical Manual of Mental Disorders: DSM-IV, 4th ed.; American Psychiatric Association: Washington, DC, USA, 1994; p. 915. [Google Scholar]
- Schalock, R.L.; Borthwick-Duffy, S.A.; Bradley, V.J.; Buntinx, W.H.E.; Coulter, D.L.; Craig, E.M.; Gomez, S.C.; Lachapelle, Y.; Luckasson, R.; Reeve, A.; et al. Intellectual Disability: Definition, Classification, and Systems of Supports, 11th ed.; American Association on Intellectual and Developmental Disabilities: Washington, DC, USA, 2010; p. 259. [Google Scholar]
- WebAIM—Web Accessibility in Mind. Cognitive Disabilities; WebAIM: Logan, UT, USA, 2007; Available online: http://www.webaim.org/articles/cognitive/ (accessed on 15 June 2016).
- Dawe, M. Desperately seeking simplicity: How young adults with cognitive disabilities and their families adopt assistive technologies. In Proceedings of the SIGCHI Conference on Human Factors in Computing Systems, Montréal, QC, Canada, 22–27 April 2006; ACM: New York, NY, USA, 2006; pp. 1143–1152. [Google Scholar]
- American Psychiatric Association. Diagnostic and Statistical Manual of Mental Disorders (DSM-5), 5th ed.; American Psychiatric Publishing: Washington, DC, USA, 2013; p. 991. [Google Scholar]
- Woods, B.; Aguirre, E.; Spector, A.E.; Orrell, M. Cognitive stimulation to improve cognitive functioning in people with dementia. Cochrane Database Syst. Rev. 2012, 2. [Google Scholar] [CrossRef] [PubMed]
- United Nations—Division for Social Policy and Development Disability. United Nations Convention on the Rights of Person’s with Disabilities; United Nations: New York, USA, 2006. [Google Scholar]
- Sadri, F. Multi-Agent Ambient Intelligence for Elderly Care and Assistance. In Proceedings of the AIP Conference, Vancouver, BC, Canada, 25–29 June 2007; Volume 2007, pp. 117–120. [Google Scholar]
- AAL Joint Programme Call AAL-2010-3 Project no. AAL 2010-3-012; Mylife: Losangeles, CA, USA, 2012.
- Lanyi, C.S.; Brown, D.J. Design of Serious Games for Students with Intellectual Disability. In Proceedings of the International Conference on Interaction Design International Development, Mumbai, India, 20–24 March 2010; Joshi, A., Dearden, A., Eds.; British Computer Society: Swinton, UK, 2010; pp. 44–54. [Google Scholar]
- Liu, A.L.; Hile, H.; Kautz, H.; Borriello, G.; Brown, P.A.; Harniss, M.; Johnson, K. Indoor Wayfinding: Developing a Functional Interface for Individuals with Cognitive Impairments. In Proceedings of the 8th International ACM SIGACCESS Conference on Computers and Accessibility (ASSETS), Portland, OR, USA, 23–25 October 2006. [Google Scholar]
- Liu, A.L.; Hile, H.; Kautz, H.; Borriello, G.; Brown, P.A.; Harniss, M.; Johnson, K. Indoor wayfinding: Developing a functional interface for individuals with cognitive impairments. Disabil. Rehabil. Assist. Technol. 2008, 3, 69–81. [Google Scholar] [CrossRef] [PubMed]
- Carmien, S.; Dawe, M.; Fischer, G.; Gorman, A.; Kintsch, A.; Sullivan, J.F. Socio-technical environments supporting people with cognitive disabilities using public transportation. ACM Trans. Comput.-Hum. Interact. 2005, 12, 233–262. [Google Scholar] [CrossRef]
- Dawe, M. Let Me Show You What I Want: Engaging Individuals with Cognitive Disabilities and their Families in Design. In Proceedings of the Extended Abstracts on Human Factors in Computing Systems, San Jose, CA, USA, 28 April–3 May 2007; pp. 2177–2182. [Google Scholar]
- Liu, A.L.; Hile, H.; Borriello, G.; Kautz, H.; Brown, P.A.; Harniss, M.; Johnson, K. Informing the Design of an AutomatedWayfinding System for Individuals with Cognitive Impairments. In Proceedings of the 3rd International Conference on Pervasive Computing Technologies for Healthcare, London, UK, 1–3 April 2009; Volume 9, p. 8. [Google Scholar]
- Ramos, J.; Anacleto, R.; Costa, A.; Novais, P.; Figueiredo, L.; Almeida, A. Orientation System for People with Cognitive Disabilities. In Ambient Intelligence—Software and Applications; Novais, P., Hallenborg, K., Tapia, D.I., Rodríguez, J.M.C., Eds.; Springer: Berlin/Heidelberg, Germany, 2012; Volume 153, pp. 43–50. [Google Scholar]
- Ramos, J.; Anacleto, R.; Novais, P.; Figueiredo, L.; Almeida, A.; Neves, J. Geo-localization System for People with Cognitive Disabilities. In Trends in Practical Applications of Agents and Multiagent Systems; Pérez, J.B., Hermoso, R., Moreno, M.N., Rodríguez, J.M.C., Hirsch, B., Mathieu, P., Campbell, A., Suarez-Figueroa, M.C., Ortega, A., Adam, E., et al., Eds.; Springer: Cham, Switzerland, 2013; Volume 221, pp. 59–66. [Google Scholar]
- Fraunnhover Portugal. AlzNav. Available online: http://www.fraunhofer.pt/en/fraunhoferaicos/-projects/internalresearch/alznav.html (accessed on 10 December 2012).
- Patterson, D.J.; Liao, L.; Fox, D.; Kautz, H. Inferring High-Level Behavior from Low-Level Sensors. In International Conference on Ubiquitous Computing; Springer: Berlin/Heidelberg, Germany, 2003; Volume 2864, pp. 73–89. [Google Scholar]
- Sadilek, A.; Kautz, H. Recognizing Multi-Agent Activities from GPS Data. Artif. Intell. 2010, 39, 1134–1139. [Google Scholar]
- Russell, S.; Norvig, P. Artificial Intelligence: A Modern Approach; Prentice Hall Series In Artificial Intelligence; Chapter Probabilis; Prentice Hall: Upper NJ River, NJ, USA, 2003; Volume 60, pp. 269–272. [Google Scholar]
- Hertzberg, J.; Chatila, R. AI Reasoning Methods for Robotics. In Springer Handbook of Robotics; Siciliano, B., Khatib, O., Eds.; Springer: Berlin/Heidelberg, Germany, 2008; Chapter 10; pp. 207–223. [Google Scholar]
- Dahan, H.; Cohen, S.; Rokach, L.; Maimon, O. Proactive Data Mining with Decision Trees; Springer Science & Business Media: Berlin, Germany, 2014; p. 94. [Google Scholar]
- Rokach, L.; Maimon, O. Decision Trees. In Data Mining and Knowledge Discovery Handbook; Springer US: Boston, MA, USA, 2005; pp. 165–192. [Google Scholar]
- Basheer, I.A.; Hajmeer, M. Artificial neural networks: Fundamentals, computing, design, and application. J. Microbiol. Methods 2000, 43, 3–31. [Google Scholar] [CrossRef]
- Jain, A.K.; Mao, J.C.; Mohiuddin, K.M. Artificial neural networks: A tutorial. Computer 1996, 29, 31–44. [Google Scholar] [CrossRef]
- Noble, W.S. What is a support vector machine? Nat. Biotechnol. 2006, 24, 1565–1567. [Google Scholar] [CrossRef] [PubMed]
- Bennett, K.P.; Campbell, C. Support vector machines: Hype or hallelujah? ACM SIGKDD Explor. Newslett. 2000, 2, 1–13. [Google Scholar] [CrossRef]
- Uusitalo, L. Advantages and challenges of Bayesian networks in environmental modelling. Ecol. Model. 2007, 203, 312–318. [Google Scholar] [CrossRef]
- Liu, A.L.; Hile, H.; Borriello, G.; Brown, P.A.; Harniss, M.; Kautz, H.; Johnson, K. Customizing directions in an automated wayfinding system for individuals with cognitive impairment. In Proceedings of the Eleventh International ACM SIGACCESS Conference on Computers and Accessibility (ASSETS), Pittsburgh, PA, USA, 25–28 October 2009; p. 27. [Google Scholar]
- Kolodner, J.L. An introduction to case-based reasoning. Artif. Intell. Rev. 1992, 6, 3–34. [Google Scholar] [CrossRef]
- Satoh, K. Speculative Computation and Abduction for an Autonomous Agent. IEICE Trans. Inf. Syst. 2005, 88, 2031–2038. [Google Scholar] [CrossRef]
- Kakas, A.C.; Kowalski, R.A.; Toni, F. The Role of Abduction in Logic Programming. Handb. Log. Artif. Intell. Log. Progr. 1998, 5, 235–324. [Google Scholar]
- Jain, P. Wireless Body Area Network for Medical Healthcare. IETE Tech. Rev. 2011, 28, 362. [Google Scholar] [CrossRef]
- Montón, E.; Hernandez, J.; Blasco, J.; Hervé, T.; Micallef, J.; Grech, I.; Brincat, A.; Traver, V. Body area network for wireless patient monitoring. IET Commun. 2008, 2, 215–222. [Google Scholar] [CrossRef]
- Wolf, L.; Saadaoui, S. Architecture Concept of a Wireless Body Area Sensor Network for Health Monitoring of Elderly People. In Proceedings of the 4th IEEE Consumer Communications and Networking Conference, Las Vegas, NV, USA, 11–13 Janurary 2007; pp. 722–726. [Google Scholar]
- Shamoo, A.E.; Resnik, D.B. Responsible Conduct of Research, 3rd ed.; Oxford University Press: Oxford, UK, 2015; p. 360. [Google Scholar]
- Yip, C.; Han, N.L.; Sng, B. Legal and ethical issues in research. Indian J. Anaesth. 2016, 60, 684–688. [Google Scholar] [PubMed]
- Kakas, A.C.; Mancarella, P. On the relation between Truth Maintenance and Abduction. In Proceedings of the First Pacific Rim International Conference on Artificial Intelligence (PRICAI), Nagoya, Japan, 1990; pp. 438–443. [Google Scholar]
- Karich, P.; Schroder, S. GraphHopper Directions API with Route Optimization. Available online: https://graphhopper.com (accessed on 20 June 2016).
- Ramos, J.; Oliveira, T.; Satoh, K.; Neves, J.; Novais, P. An Orientation Method with Prediction and Anticipation Features. Iberoam. J. Artif. Intell. 2017, 20, 82–95. [Google Scholar] [CrossRef]
- Pei, J.; Han, J.; Mortazavi-Asl, B.; Wang, J.; Pinto, H.; Chen, Q.; Dayal, U.; Hsu, M.C. Mining sequential patterns by pattern-growth: The PrefixSpan approach. IEEE Trans. Knowl. Data Eng. 2004, 16, 1424–1440. [Google Scholar]
- Ankerst, M.; Breunig, M.M.; Kriegel, H.P.; Sander, J. Optics: Ordering points to identify the clustering structure. ACM Sigmod Rec. 1999, 28, 49–60. [Google Scholar] [CrossRef]
- Fournier-Viger, P. SPMF—Open-Source Data Mining Library. Available online: http://www.philippe-fournier-viger.com/spmf/index.php (accessed on 30 June 2016).









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Projects | Carmien et al. [13] | Liu et al. [15] | Ramos et al. [16,17] | Fraunhofer Portugal [18] | Patterson et al. [19] | Sadilek & Kautz [20] | ||
|---|---|---|---|---|---|---|---|---|
| Features | ||||||||
| Orientation Method | Images | ✓ | ||||||
| Compass | ✓ | |||||||
| Augmented Reality | ✓ | |||||||
| Prompts | Audio | ✓ | ✓ | ✓ | ✓ | |||
| Visual | ✓ | ✓ | ✓ | ✓ | ||||
| Context Aware | ✓ | ✓ | ||||||
| User Frequent Behaviour | ✓ | ✓ | ||||||
| Real Time Monitoring | ✓ | ✓ | ✓ | ✓ | ||||
| Features | Complexity | Fault Tolerance | Learning Mechanism | Reward/Feedback | Input | |
|---|---|---|---|---|---|---|
| Reasoning Methods | ||||||
| Decision Tree Learning | NP-hard | ✗ | Supervised | ✓ | ||
| Artificial Neural Networks | High processing | ✓ | Unsupervised | ✓ | ||
| Support Vector Machines | ✓ | Supervised | ✓ | |||
| Bayesian Networks | ✓ | ✓ | ||||
| Markov Decision Process | ✓ | Unsupervised | Reward function | ✗ | ||
| Case Based Reasoning | ✓ | Supervised | User Feedback | Knowledge Base | ||
| Speculative Computation | ✓ | Unsupervised | ✗ | Default Values | ||
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ramos, J.; Oliveira, T.; Satoh, K.; Neves, J.; Novais, P. Cognitive Assistants—An Analysis and Future Trends Based on Speculative Default Reasoning. Appl. Sci. 2018, 8, 742. https://doi.org/10.3390/app8050742
Ramos J, Oliveira T, Satoh K, Neves J, Novais P. Cognitive Assistants—An Analysis and Future Trends Based on Speculative Default Reasoning. Applied Sciences. 2018; 8(5):742. https://doi.org/10.3390/app8050742
Chicago/Turabian StyleRamos, João, Tiago Oliveira, Ken Satoh, José Neves, and Paulo Novais. 2018. "Cognitive Assistants—An Analysis and Future Trends Based on Speculative Default Reasoning" Applied Sciences 8, no. 5: 742. https://doi.org/10.3390/app8050742
APA StyleRamos, J., Oliveira, T., Satoh, K., Neves, J., & Novais, P. (2018). Cognitive Assistants—An Analysis and Future Trends Based on Speculative Default Reasoning. Applied Sciences, 8(5), 742. https://doi.org/10.3390/app8050742