Review on Inlet/Outlet Oil Coordinated Control for Electro-Hydraulic Power Mechanism under Sustained Negative Load



Abstract
:
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
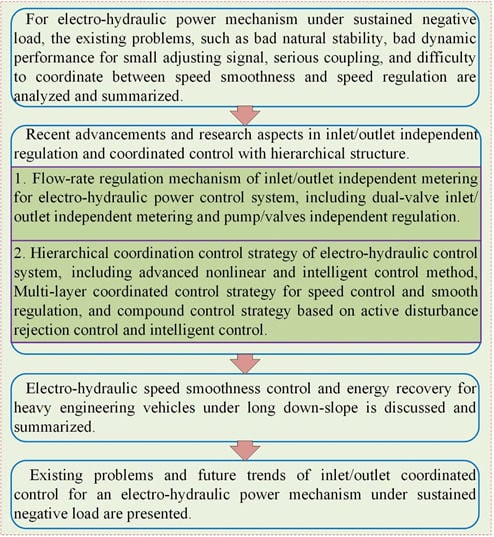
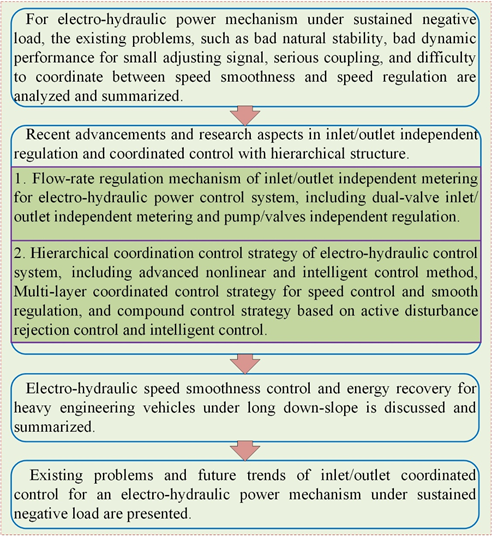
1. Introduction
2. Inlet/Outlet Independent Regulation and Coordinated Control
2.1. Flow-Rate Regulation Mechanism of Inlet/Outlet Independent Metering
- The inlet/outlet independent metering control has become an important research direction for electro-hydraulic power mechanism. It not only improves the accuracy and stability of the motion control system, but also possibly realizes the energy saving and regeneration. While maintaining the excellent dynamic performance of the electro-hydraulic control system, how to increase the energy efficiency of system has become an important research topic.
- With the relatively large amount of attention devoted to valve-controlled cylinder systems, references are comparatively scarce on independent and coordinated control of pump/valves for pump-controlled motor system. However, the study on inlet/outlet independent metering control for pump-controlled motor system also has important practical value in engineering application.
- For the inlet/outlet independent metering control of electro-hydraulic system, while adopting different control strategies and structural parameters of the valve, the control performance and energy-saving efficiency are affected to a certain extent, which has been the focus of intensive research.
- As new hydraulic components, the digital programmable valve and novel flow rate amplifier valve with digital pilot are applied to the independent metering control system, which promotes the modern intelligent control for electro-hydraulic system. However, most of the digital valves currently studied are only as high-speed on-off valves. Because of the limitation with their structure, it can only be applied to pilot control and small flow rate control applications.
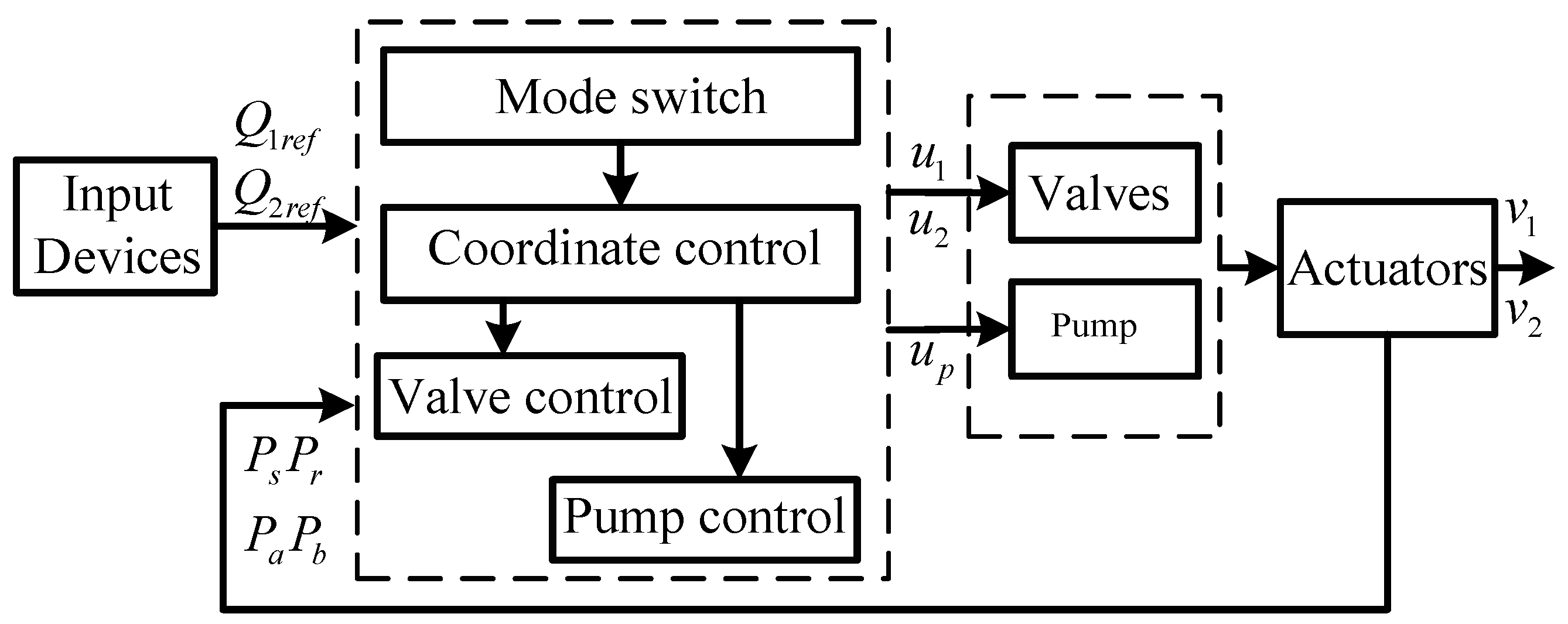
- The key issue of the study on inlet/outlet independent metering control system is to coordinate control variables of double electro-hydraulic control elements, which usually includes the flow-rate and the pressure regulation. Therefore, considering the system under different working modes, independent and coordinated regulation mechanism based on motion-force hierarchical control architecture is always an important research topic.
- The function exchange of motor and pump under sustained negative load seriously affects the dynamic stability performance for motion control system. Aiming at the problem, development of speed smoothness control strategy with motion-force hierarchical structure have been an urgent problem to be solved.
- With sustained negative load in engineering applications, the study of regulation mechanism for suppressing negative load and integrated energy management scheme are of great practical value for electro-hydraulic motion control system.
2.2. Control Strategy for Electro-Hydraulic Control System
2.2.1. Nonlinear Control Algorithm of Electro-Hydraulic Control System
2.2.2. Hierarchical Coordination Control Strategy of Electro-Hydraulic Control System
- Because of nonlinear characteristics in electro-hydraulic control system, such as the nonlinearity of pressure and flow rate in servo valve, the structure nonlinearity of differential equation, traditional linear control theory has been unable to meet the requirements of high precision control system. Therefore, advanced nonlinear control method based on nonlinear model are always an important research topic.
- With the rapid development of intelligent control algorithm, the compound control method incorporated intelligent control algorithm and modern control is the trend of future development.
- With the improvement of control performance requirements and complexity for electro-hydraulic motion control system, the motion-force hierarchical and coordinated control based on independent metering control has applied in operating control system of hydraulic excavator and speed smoothness control system of heavy transport vehicles. However, electro-hydraulic speed smoothness control and energy recovery for construction machineries and engineering vehicles have been an urgent problem to be solved.
- Aiming at the influence of various kinds of uncertainties and unknown disturbances in electro-hydraulic motion control system, the active disturbance rejection control (ADRC) technique assigns all uncertainties to the total disturbance of system and gives estimation and compensation. Moreover, because of the good robustness and easy implementation, the ADRC will be very useful in industrial applications. Then, ADRC and compound control strategy based on ADRC are new research focus for electro-hydraulic motion control system.
- Based on independent metering control and hierarchical control for electro-hydraulic motion control system, motion-force control algorithm incorporated intelligent control algorithm become a new research topic.
3. Nonlinear Modeling of Independent Metering Control for Electro-Hydraulic Mechanism
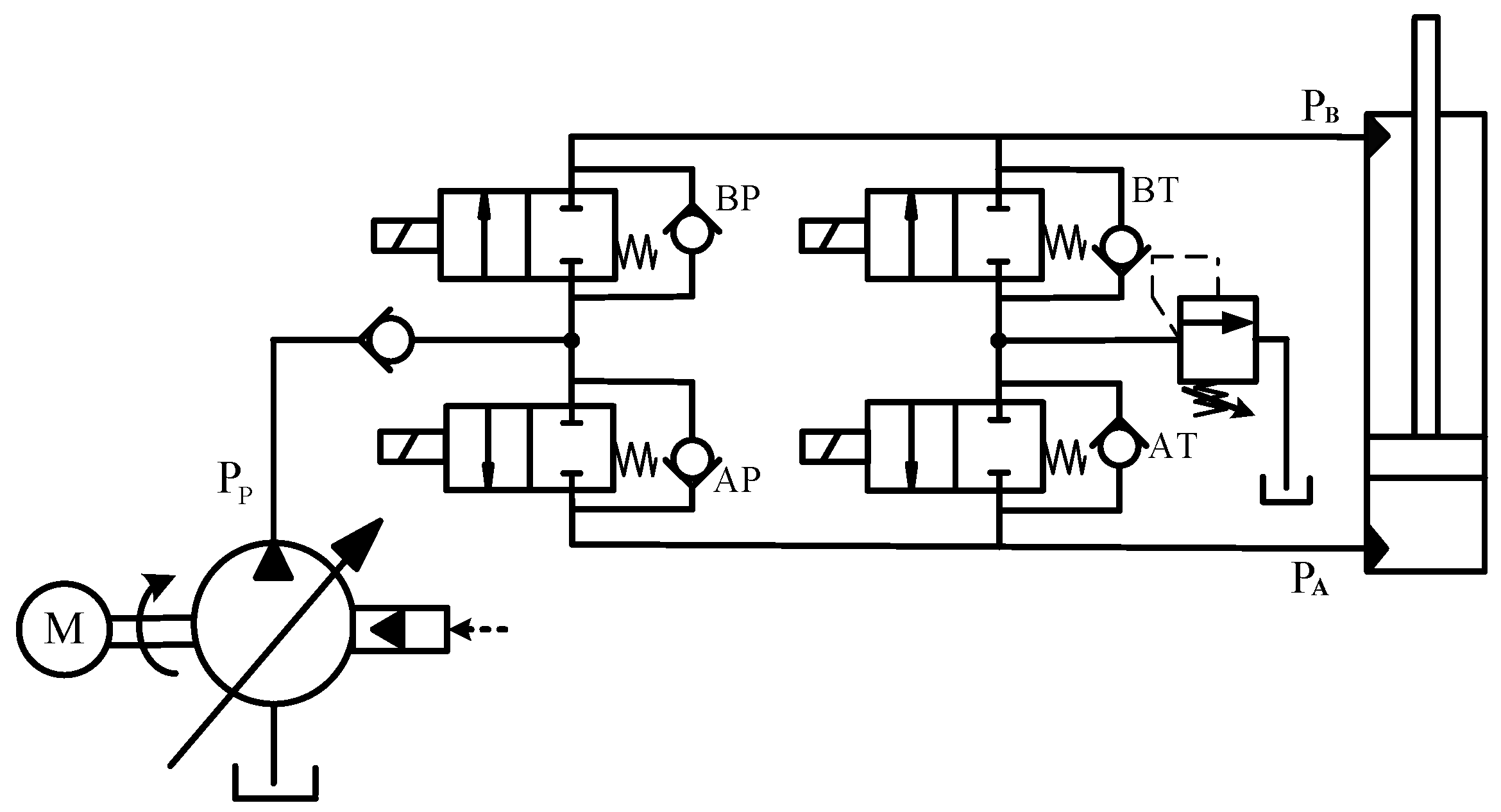
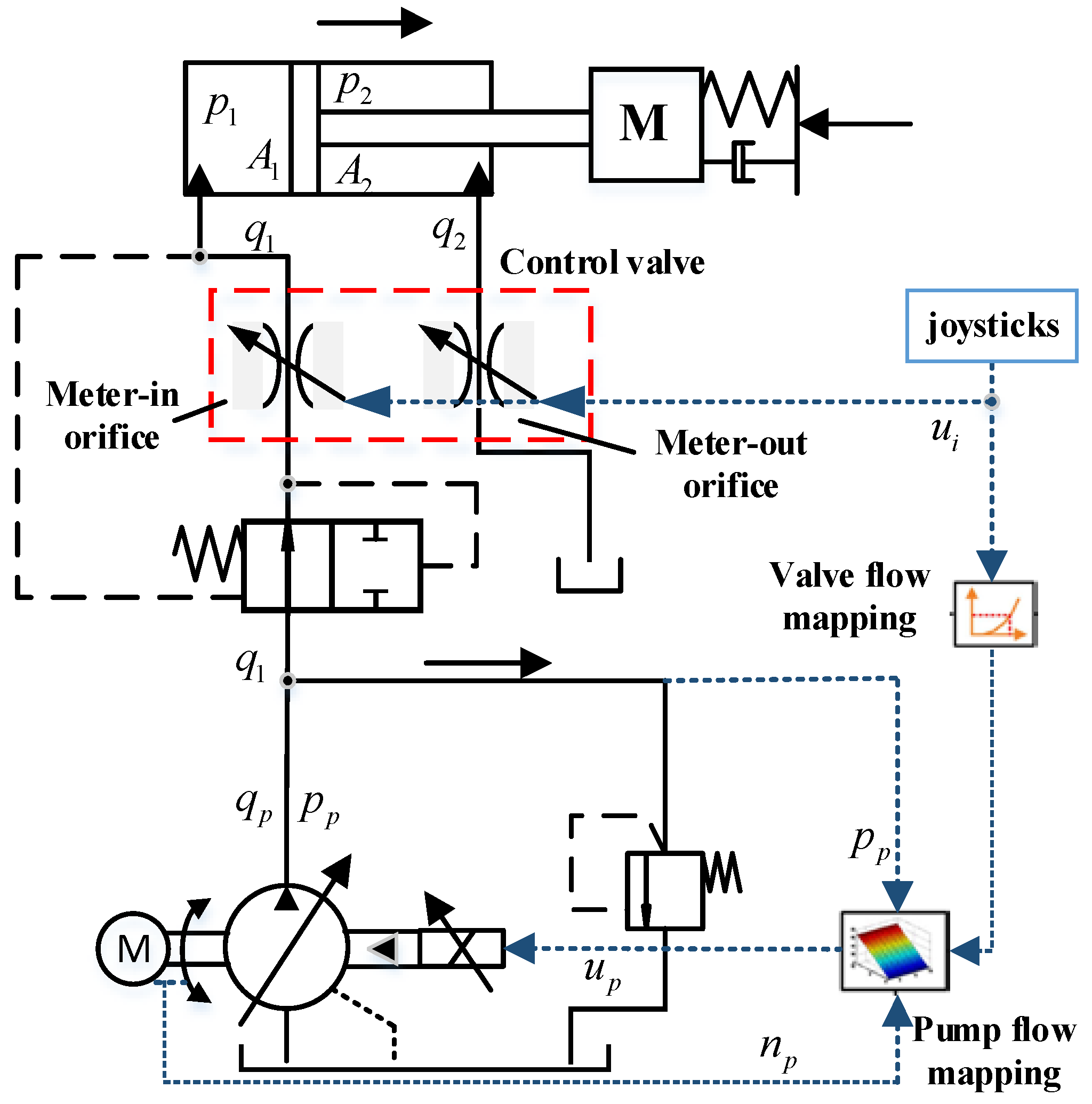
3.1. Non-Linear Modeling of Dual-Valve Independent Metering Control System
3.2. Non-Linear Modeling of Pump/Valves Independent Metering Control System
4. Electro-Hydraulic Speed Smoothness Control and Energy Recovery for Heavy Vehicles
- Through continuous braking of the brake, sustained negative loads may be fully suppressed, but that will cause the serious braking heat as well as decline of braking performance, especially under long down-slope. Although intermittent repeated braking can improve this problem to a certain degree, the speed smoothness is not good.
- The solution, employing pump-controlled speed regulation and electro-hydraulic proportional balancing valve for back pressure regulation, can decouple speed control and negative load suppression, and brake slow speed is not required for long downhill slope. Moreover, the balancing valve is equipped on return line, which facilitates cooler arrangement for forced cooling, and response speed due to valve-controlled back pressure regulation. However, the disadvantage of this scheme is that it cannot recover downhill potential energy.
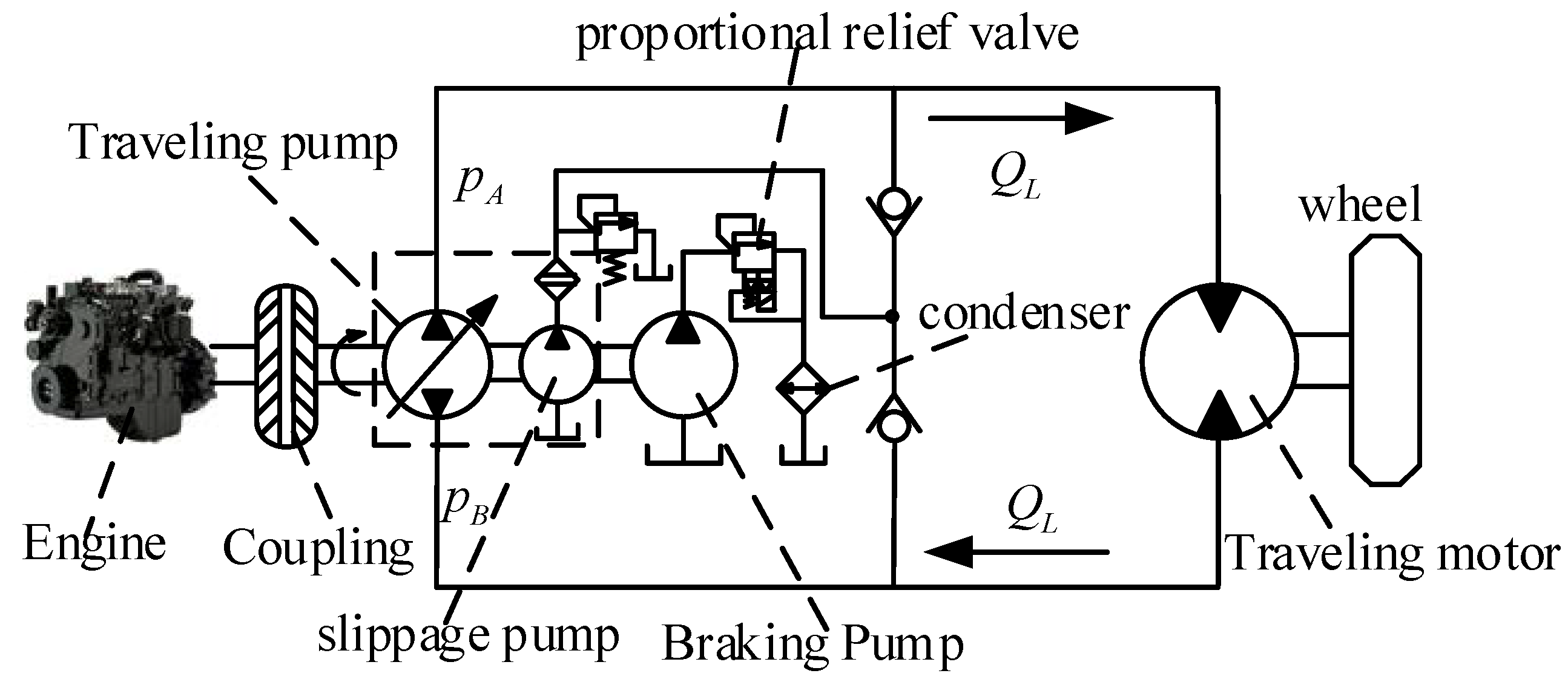
- Given that the solution of speed regulation with pump-control and speed smoothness control with retarder pump retardation solution, downhill potential energy is absorbed by the engine load and other hydraulic circuits, and the remaining energy is further utilized by the retarder system. Although this scheme recovers part of the downhill potential energy, system structure is complex and limited by installation space, especially while the additional weight and installation space of the recovery device is strictly required in practical engineering application. In addition, response speed is slower compared with the above scheme.
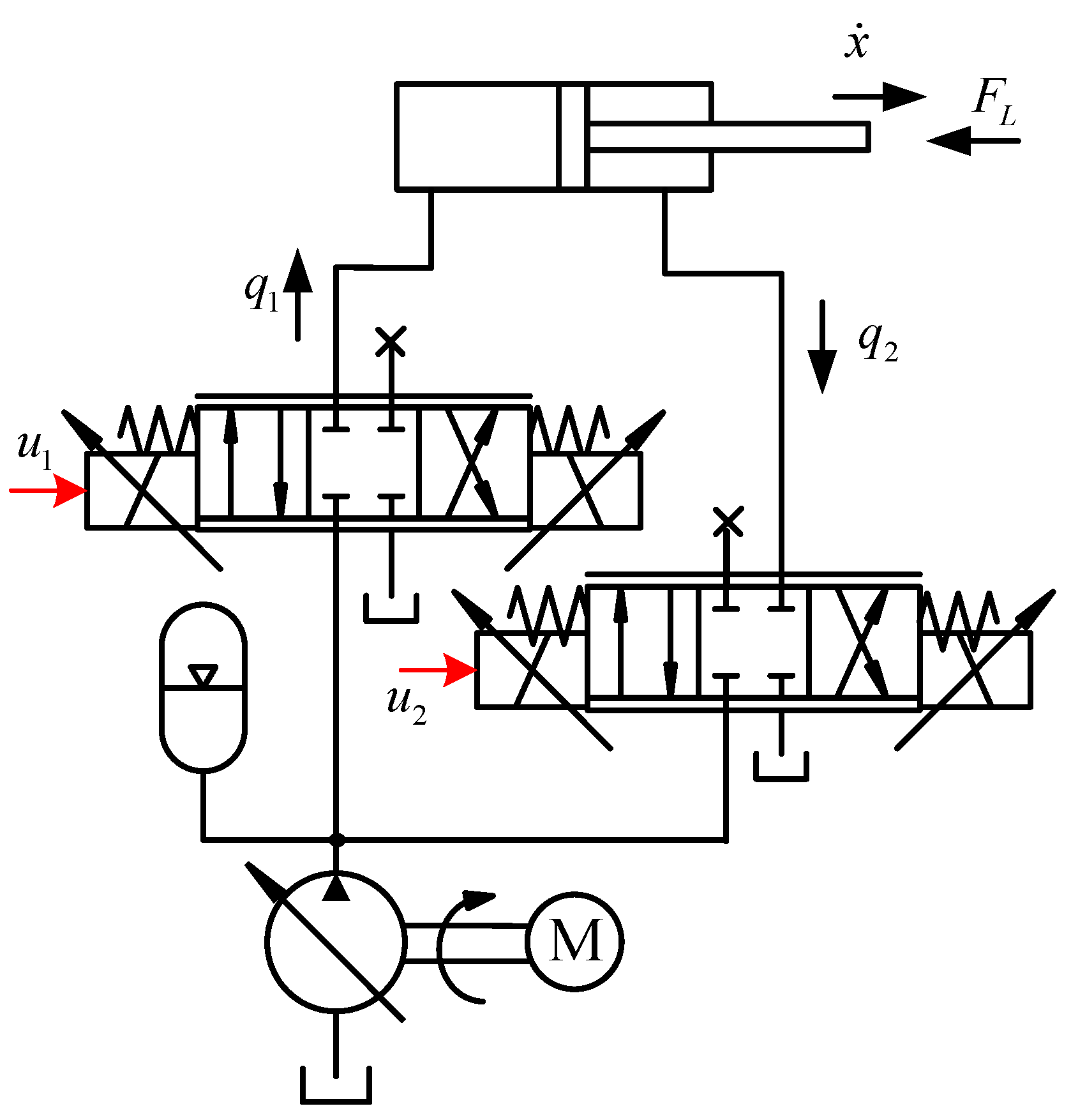
- Dual-valve independent metering scheme can achieve coupling influence between speed regulation and negative load suppression, and it has a simple structure and fast response. This solution, combined with the accumulator, can supply the cooling circuit with oil, and partially recover of downhill energy. But the disadvantages are that the throttling loss is serious, and the energy efficiency is lower compared with pump-control regulation.
5. Conclusions
Author Contributions
Acknowledgments
Conflicts of Interest
References
- Li, Y.H.; Wang, Y.; Geoffrey Chase, J.; Mattila, J.; Myung, H.; Sawodny, O. Survey and Introduction to Focused Section on Mechatronics for Sustainable and Resilient Civil Infrastructure. IEEE/ASME Trans. Mechatron. 2013, 18, 1637–1645. [Google Scholar] [CrossRef]
- Sheng, Z.; Li, Y.H. Hybrid Robust Control Law with Disturbance Observer for High-Frequency Response Electro-Hydraulic Servo Loading System. Appl. Sci. 2016, 6, 98. [Google Scholar] [CrossRef]
- Chen, M.M. The Research on Stability of Counterbalance Valve in Over-Running Load Condition; Jilin University: Changchun, China, 2015. [Google Scholar]
- Liu, X.M.; Lang, X.J. Research on Speed Stability of Separate Direction Valve Control System under Over-running Load. Chin. J. Mech. Res. Appl. 2015, 2, 176–179. [Google Scholar]
- Liu, B.C. A Study of Winch System for Wheel Crane in the Over-Running Load Condition; Jilin University: Changchun, China, 2011. [Google Scholar]
- Xian, Y.P. Research on Closed Hydraulic System of Crawler Crane in Over-Running Load Condition; Dalian University of Technology: Dalian, China, 2012. [Google Scholar]
- Nie, D.W. Research on Control Method of Load for Truck Crane Hoisting Mechanism in Over-Running Load Condition; Hunan University: Changsha, China, 2013. [Google Scholar]
- Backe, W. Design systematics and performance of cartridge valve controls. In Proceedings of the International Conference on Fluid Power, Tampere, Finland, 1–4 June 1987; pp. 1–48. [Google Scholar]
- Jansson, A.; Palmberg, J.O. Separate Controls of Meter-In and Meter-Out Orifices in Mobile Hydraulic Systems; SAE Technical Paper; SAE International: Warrendale, PA, USA, 1990. [Google Scholar]
- Shenouda, A.; Book, W. Energy Saving Analysis Using a Four-Valve Independent Metering Configuration Controlling a Hydraulic Cylinder; SAE Technical Paper; SAE International: Warrendale, PA, USA, 2005. [Google Scholar]
- Shenouda, A.; Wayne, B. Optimal Mode Switching for a Hydraulic Actuator Controlled with Four-Valve Independent Metering Configuration. Int. J. Fluid Power 2008, 9, 35–43. [Google Scholar] [CrossRef]
- Elfving, M.; Palmberg, J.O.; Jansson, A. Distributed control of fluid power actuators-a load sensing application of a cylinder with decoupled chamber pressure control. In Proceedings of the Fifth Scandinavian International Conference on Fluid Power (SICFP’97), Linkoping, Sweden, 28–30 May 1997. [Google Scholar]
- Opdenbosch, P.; Sadegh, N.; Enes, A.R.; Book, W.J. Auto-calibration based control for independent metering of hydraulic actuators. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA 2011), Shanghai, China, 9–13 May 2011; Volume 43, pp. 153–158. [Google Scholar]
- Ding, R.Q.; Xu, B.; Zhang, J.; Li, G. Mechanical-hydraulic Coupling Model of Independent Metering Control Excavator and Its Test Verification. Chin. J. Trans. Chin. Soc. Agric. Mach. 2016, 47, 309–409. [Google Scholar]
- Hu, H.; Zhang, Q. Realization of Programmable Control using a Set of Individually Controlled Electrohydraulic Valves. Int. J. Fluid Power 2002, 3, 9–34. [Google Scholar] [CrossRef]
- Zhang, Q.; Hu, H. Multi-Function Realization Using an Integrated Programmable E/H Control Valve. Appl. Eng. Agric. 2003, 19, 283–290. [Google Scholar]
- Pedersen, H.C.; Andersen, T.O.; Hansen, R.H.; Stubkier, S. Investigation of Separate Meter-In Separate Meter-Out Control Strategies for Systems with Over Centre Valves. In Proceedings of the Bath/ASME Symposium on Fluid Power & Motion Control (FPMC 2010), Bath, UK, 12–14 September 2010. [Google Scholar]
- Andersen, T.O.; Mnzer, M.E.; Hanse, M.R. Evaluation of control strategies for separate meter-in separate meter-out hydraulic boom actuation in mobile applications. In Proceedings of the 17th International Conference on Hydraulic and Pneumatics, Ostrava, Czech Republic, 5–7 June 2001; pp. 450–475. [Google Scholar]
- Wang, Q.F.; Gu, L.Y.; Lu, Y.X. Research on Principle and Performance of Meter-in, Meter-out Independent Regulate based on Pressure Decrease Sensing. Chin. J. Mech. Eng. 2001, 37, 21–24. [Google Scholar] [CrossRef]
- Wang, Q.F. Research on Inlet/Outlet Independent Regulation of Electro-hydraulic Throttling System with Large Inertia Load. Chin. J. Mech. Eng. 1999, 10, 853–855. [Google Scholar]
- Liu, Y.J.; Xu, B.; Yang, H.; Zeng, D. Strategy for Flow and Pressure Control of Electro-hydraulic Proportional Separate Meter-In and Meter-Out Control System. Appl. Eng. Agric. 2010, 41, 182–187. [Google Scholar]
- Xu, B.; Zeng, D.R.; Ge, Y.Z.; Liu, Y.J. Research on Characteristic of Mode Switch of Separate Meter in and Meter out Load Sensing Control System. J. Zhejiang Univ. 2011, 45, 858–863. [Google Scholar]
- Quan, L.; Lian, Z.S. Improving the efficiency of pump Controlled Differential Cylinder System with Inlet and Outlet Separately Controlled Principle. Chin. J. Mech. Eng. 2005, 41, 123–127. [Google Scholar] [CrossRef]
- Yuan, M.L. Research on Load Port Independently Controlled Double Servo Valves Cylinder System; Beijing Institute of Technology: Beijing, China, 2015. [Google Scholar]
- Cheng, M.; Xu, B.; Zhang, J.; Ding, R. Valve-based compensation for controllability improvement of the energy-saving electrohydraulic flow matching system. Zhejiang Univ. Sci. A 2017, 18, 430–442. [Google Scholar] [CrossRef]
- Dong, W.; Jiao, Z.; Wu, S. Compound control strategy for independent metering directional valve of engineering machinery by simulation. In Proceedings of the 2014 IEEE International Conference on Mechatronics and Automation, Tianjin, China, 3–6 August 2014. [Google Scholar]
- Wang, S. Independent Metering Control Programmable Valve and Its Application in Intelligent Hydraulic Excavator; Zhejiang University of Technology: Hangzhou, China, 2017. [Google Scholar]
- Li, Z.Z.; Huang, H.J.; Quan, L.; Wang, S.G. The Independent Metering System Based on Digital Flow Valve. Chin. Hydraul. Pneum. 2016, 2, 17–23. [Google Scholar]
- Liu, Y. Research on Key Techniques of Independent Metering Directional Valve Control System; Zhejiang University: Hangzhou, China, 2011. [Google Scholar]
- Liu, J.; Xie, H.; Hu, L.; Fu, X. Realization of direct flow control with load pressure compensation on a load control valve applied in overrunning load hydraulic systems. Flow Meas. Instrum. 2017, 53, 261–268. [Google Scholar] [CrossRef]
- Zheng, Q.; Li, Y.H.; Yang, L.M. Compound control strategy for the pump controlled parallel variable displacement motor speed system. J. Beijing Univ. Aeronaut. Astron. 2012, 38, 692–696. [Google Scholar]
- Niksefat, N.; Sepehri, N. Robust Force Controller Design for an Electro-Hydraulic Actuator Based on Nonlinear Model. In Proceedings of the 1999 IEEE International Conference on Robotics & Automation, Detroit, MI, USA, 10–15 May 1999; pp. 200–206. [Google Scholar]
- Liu, R.; Alleyne, A. Nonlinear Force/Pressure Tracking of an Electro-Hydraulic Actuator. J. Dyn. Syst. Meas. Control 2000, 122, 232–237. [Google Scholar] [CrossRef]
- Kaddissi, C.; Kenne, J.P.; Saad, M. Identification and Real-Time Control of an Electrohydraulic Servo System Based on Nonlinear Backstepping. IEEE/ASME Trans. Mechatron. 2007, 12, 12–22. [Google Scholar] [CrossRef]
- Eriksson, B. Mobile Fluid Power Systems Design: With a Focus on Energy Efficiency. Ph.D. Thesis, Linköping University, Linköping, Sweden, 2010. [Google Scholar]
- Eriksson, B.; Palmberg, J.O. Individual Metering Fluid Power Systems: Challenges and Opportunities. Proceedings of the Institution of Mechanical Engineers. Part I J. Syst. Control Eng. 2011, 225, 196–211. [Google Scholar]
- Nam, Y. QFT force loop design for the aerodynamic load simulator. IEEE Trans. Aerosp. Electron. Syst. 2001, 37, 1384–1392. [Google Scholar]
- Nam, Y.; Hong, S.K. Force control system design for aerodynamic load simulator. Control Eng. Pract. 2002, 10, 549–558. [Google Scholar] [CrossRef]
- Truong, D.Q.; Ahn, K.K. Force control for hydraulic load simulator using self-tuning grey predictor-fuzzy PID. Mechatronics 2009, 19, 233–246. [Google Scholar] [CrossRef]
- Truong, D.Q.; Ahn, K.K.; Soo, K.J.; Soo, Y.H. Application of fuzzy-PID controller in hydraulic load simulator. In Proceedings of the IEEE International Conference on ICMA 2007, Harbin, China, 5–8 August 2007; pp. 3338–3343. [Google Scholar]
- Eryilmaz, B.; Wilson, B.H. Improved tracking control of hydraulic systems. J. Dyn. Syst. Meas. Control 2001, 23, 457–462. [Google Scholar] [CrossRef]
- Sohl, G.A.; Bobrow, J.E. Experiments and simulations on the nonlinear control of a hydraulic servo system. IEEE Trans. Control Syst. Technol. 1999, 7, 238–247. [Google Scholar] [CrossRef]
- Hu, C.; Yao, B.; Wang, Q. Adaptive Robust Precision Motion Control of Systems with Unknown Input Dead-Zones: A Case Study with Comparative Experiments. IEEE Trans. Ind. Electron. 2011, 58, 2454–2464. [Google Scholar] [CrossRef]
- Nozaki, T.; Mizoguchi, T.; Ohnishi, K. Decoupling Strategy for Position and Force Control Based on Modal Space Disturbance Observer. IEEE Trans. Ind. Electron. 2014, 61, 1022–1032. [Google Scholar] [CrossRef]
- Pillosu, S.; Pisano, A.; Usai, E. Unknown-input observation techniques for infiltration and water flow estimation in open-channel hydraulic systems. Control Eng. Pract. 2012, 20, 1374–1384. [Google Scholar] [CrossRef]
- Kaddissi, C.; Kenne, J.P.; Saad, M. Indirect Adaptive Control of an Electro-hydraulic Servo System Based on Nonlinear Backstepping. IEEE/ASME Trans. Mechatron. 2011, 16, 1171–1177. [Google Scholar] [CrossRef]
- Yang, Y.; Balakrishnan, S.N.; Tang, L.; Landers, R.G. Electro-hydraulic Control Using Neural MRAC Based on a Modified State Observer. IEEE/ASME Trans. Mechatron. 2013, 18, 867–877. [Google Scholar] [CrossRef]
- Zhang, J.H.; Zheng, W.X. Design of Adaptive Sliding Mode Controllers for Linear Systems via Output Feedback. IEEE Trans. Ind. Electron. 2014, 61, 3553–3562. [Google Scholar] [CrossRef]
- Chiang, M.H.; Lee, L.W.; Liu, H.H. Adaptive fuzzy controller with self-tuning fuzzy sliding-mode compensation for position control of an electro-hydraulic displacement-controlled system. J. Intell. Fuzzy Syst. 2014, 26, 815–830. [Google Scholar]
- Yao, J.Y.; Jiao, Z.X.; Yao, B.; Shang, Y.; Dong, W. Nonlinear Adaptive Robust Force Control of Hydraulic Load Simulator. Chin. J. Aeronaut. 2012, 25, 766–775. [Google Scholar] [CrossRef]
- Ho, T.H.; Ahn, K.K. Speed Control of a Hydraulic Pressure Coupling Drive Using an Adaptive Fuzzy Sliding-Mode Control. IEEE/ASME Trans. Mechatron. 2012, 17, 976–986. [Google Scholar] [CrossRef]
- Liu, Y.J.; Xu, B. Calculation Force Control Based on Linearization Feedback Model of Separate Meter in and Separate Meter Out Control System. In Proceedings of the IEEE International Conference on Automation and Logistics, Shenyang, China, 18–21 August 2009; pp. 1464–1468. [Google Scholar]
- Jin, M.; Wang, Q. An Energy-Saving Way to Balance Variable Negative Load Based on Back-Stepping Control with Load Observer. In Proceedings of the BATH/ASME 2016 Symposium on Fluid Power and Motion Control, Bath, UK, 7–9 September 2016. [Google Scholar]
- Yao, J.; Deng, W. Active disturbance rejection adaptive control of uncertain nonlinear systems: Theory and application. Nonlinear Dyn. 2017, 89, 1–14. [Google Scholar] [CrossRef]
- Castañeda, L.A.; Luviano-Juárez, A.; Chairez, I. Robust Trajectory Tracking of a Delta Robot Through Adaptive Active Disturbance Rejection Control. IEEE Trans. Control Syst. Technol. 2015, 23, 1387–1398. [Google Scholar] [CrossRef]
- Li, P.; Lam, J.; Chun, K.C. Experimental Investigation of Active Disturbance Rejection Control for Vehicle Suspension Design. Int. J. Theor. Appl. Mech. 2016, 1, 89–96. [Google Scholar]
- Moghadam, H.Z.; Landers, R.G.; Balakrishnan, S.N. Hierarchical optimal force-position control of complex manufacturing processes. IEEE Trans. Control Syst. Technol. 2005, 13, 321–327. [Google Scholar]
- Wang, Z.P.; Wang, Y.C.; Zhang, L.; Liu, M.C. Vehicle Stability Enhancement through Hierarchical Control for a Four-Wheel-Independently-Actuated Electric Vehicle. Energies 2017, 10, 947. [Google Scholar] [CrossRef]
- Wu, X.; Shen, J.; Li, Y.G.; Lee, K.Y. HGLMA. Hierarchical optimization of boiler–turbine unit using fuzzy stable model predictive control. Control Eng. Pract. 2014, 30, 112–123. [Google Scholar] [CrossRef]
- Yao, B.; Hu, C.H.; Wang, Q.F. An Orthogonal Global Task Coordinate Frame for Contouring Control of Biaxial Systems. IEEE/ASME Trans. Mechatron. 2012, 17, 622–634. [Google Scholar]
- Liu, S.; Yao, B. Coordinate Control of Energy Saving Programmable Valves. IEEE Trans. Control Syst. Technol. 2007, 16, 34–45. [Google Scholar] [CrossRef]
- Zhang, R.; Alleyne, A.; Prasetiawan, E. Modeling and H2/H∞ MIMO control of an Earthmoving vehicle powertrain. J. Dyn. Syst. Meas. Control. 2002, 124, 625–636. [Google Scholar] [CrossRef]
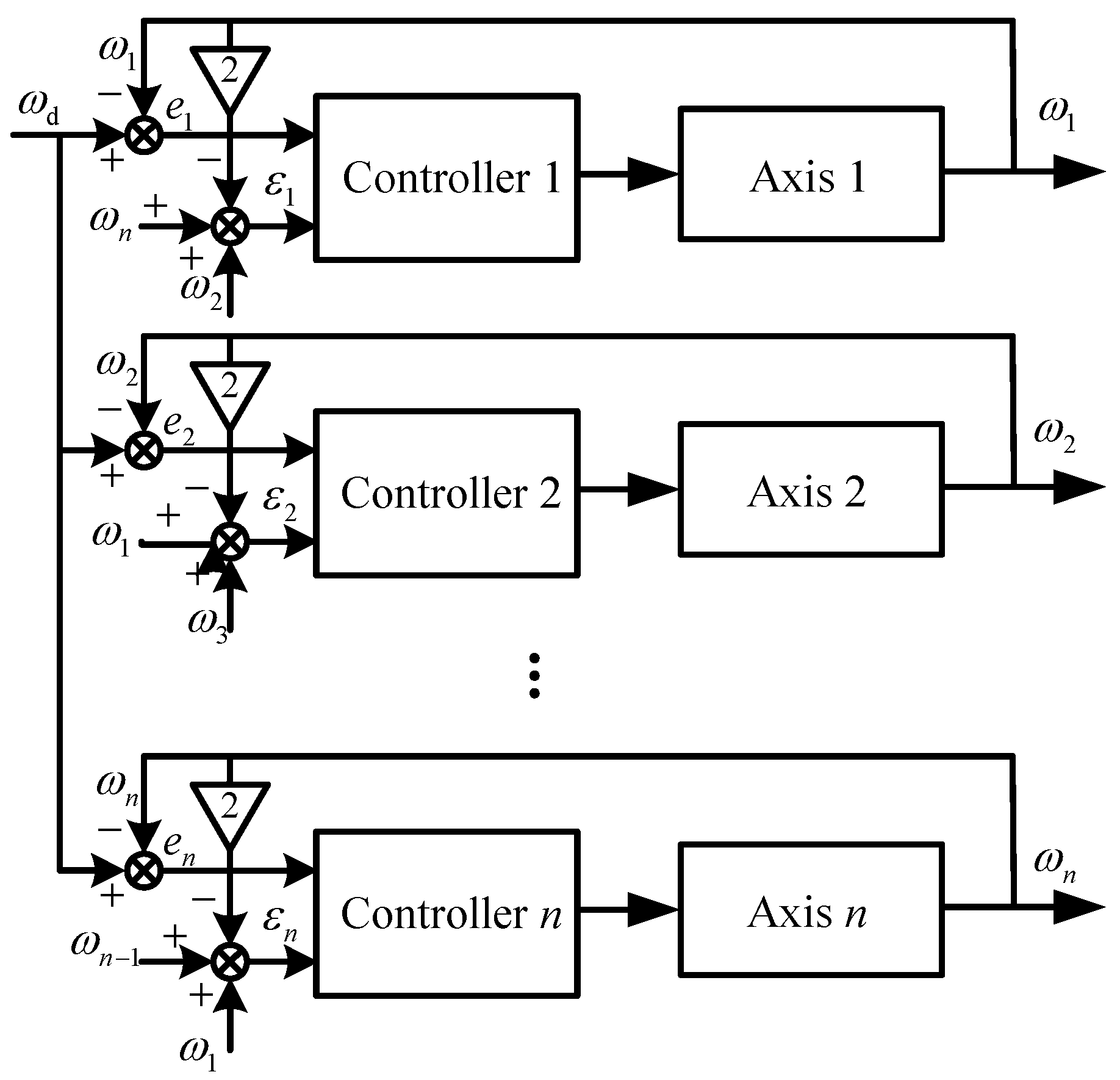
- Zhang, C.H.; Shi, Q.; Cheng, J. Synchronization Control Strategy in Multi-motor Systems Based on the Adjacent Coupling Error. Proc. CSEE 2007, 15, 59–63. [Google Scholar]
- Fang, R.W.; Chen, J.S. Cross-coupling control for a direct-drive robot. JSME Int. J. Ser. C 2002, 45, 749–757. [Google Scholar] [CrossRef]
- Sun, H.; Chiu, T.C. Motion synchronization for dual-cylinder electro-hydraulic lift systems. IEEE/ASME Trans. Mechatron. 2002, 7, 171–181. [Google Scholar]
- Zhu, X.; Cao, J.; Tao, G.; Yao, B. Synchronization Strategy Research of Pneumatic Servo System Based on Separate Control of Meter-in and Meter-out. In Proceedings of the 2009 IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Singapore, 14–17 July 2009; pp. 14–17. [Google Scholar]
- Xu, B.; Ding, R.Q.; Zhang, J.H.; Cheng, M.; Sun, T. Pump/valves coordinate control of the independent metering system for mobile machinery. Autom. Constr. 2015, 57, 98–111. [Google Scholar] [CrossRef]
- Li, Y.H.; Zheng, Q.; Yang, L.M. Design of robust sliding mode control with disturbance observer for multi-axis coordinated traveling system. Comput. Math. Appl. 2012, 64, 759–765. [Google Scholar] [CrossRef]
- Fazeli, A.; Zeinali, M.; Khajepour, A. Application of Adaptive Sliding Mode Control for Regenerative Braking Torque Control. IEEE/ASME Trans. Mechatron. 2012, 17, 745–755. [Google Scholar] [CrossRef]
- Jin, C.; Zheng, S.Y.; Tian, H.Y. Anti-drive System Design and Hierarchy Control Strategy of Electric Drive Vehicle. Trans. Chin. Soc. Agric. Mach. 2014, 45, 22–27. [Google Scholar]
- Chen, Q.; Wang, Q.; Wang, T. A novel hybrid control strategy for potential energy regeneration systems of hybrid hydraulic excavators. Proc. Inst. Mech. Eng. Part I J. Syst. Control Eng. 2016, 230, 375–384. [Google Scholar] [CrossRef]
- Wang, T.; Wang, Q.; Lin, T. Improvement of boom control performance for hybrid hydraulic excavator with potential energy recovery. Autom. Constr. 2013, 30, 161–169. [Google Scholar] [CrossRef]
- Barbieri, F.A.A.; Andreatta, E.C.; Argachoy, C.; Brandao, H. Decompression engine brake modeling and design for diesel engine application. SAE Int. J. Engines 2010, 3, 92–102. [Google Scholar] [CrossRef]
- Karakoc, K.; Park, E.J.; Suleman, A. Improved braking torque generation capacity of an eddy current brake with time varying magnetic field: A numerical study. Finite Elements Anal. Des. 2012, 59, 66–75. [Google Scholar] [CrossRef]
- Zhang, H.; Guo, K.; Wang, C.Y. Design and analysis of hydraulic retarder device for heavy vehicle. Sci. Technol. Eng. 2017, 17, 25–29. [Google Scholar]
- Hong, D.; Wang, I.; Yoon, P.; Huh, K. Development of a vehicle stability control system using brake-by-wire actuators. J. Dyn. Syst. Meas. Control 2008, 130, 011008. [Google Scholar] [CrossRef]
- Li, Y.H.; He, L.Y. Counterbalancing Speed Control for Hydrostatic Drive Heavy Vehicle under Long Down-Slope. IEEE/ASME Trans. Mechatron. 2015, 20, 1533–1542. [Google Scholar] [CrossRef]
- Shen, J.J.; Liu, B.X.; Zhang, Z.F. Discussion on Brake Performance of Hydraulic Driving Vehicle at Downhill. J. Zhengzhou Univ. (Eng. Sci.) 2007, 28, 113–116. [Google Scholar]
- Ni, J.S. Research of the Braking Performance and Optimization Design of Heavy Duty Construction Vehicle Eddy Current Retarder. Chin. J. Mech. Transm. 2015, 9, 81–83. [Google Scholar]
- Wang, T. Study on Boom Energy Recovery Element and System of Hybrid Excavator; Zhejiang University: Hangzhou, China, 2013. [Google Scholar]
- Xie, L.H.; Li, J.H.; Cai, S.; Li, X. Electromagnetic Energy-Harvesting Damper with Multiple Independently Controlled Transducers: On-Demand Damping and Optimal Energy Regeneration. IEEE/ASME Trans. Mechatron. 2017, 22, 2705–2713. [Google Scholar] [CrossRef]
- Ho, T.H.; Ahn, K.K. Design and control of a closed-loop hydraulic energy-regenerative system. Autom. Constr. 2012, 22, 444–458. [Google Scholar] [CrossRef]
- Truong, B.N.M.; Truong, D.Q.; Young, L.S. Study on energy regeneration system for hybrid hydraulic excavator. In Proceedings of the 2015 International Conference on Fluid Power and Mechatronics (FPM), Harbin, China, 25–26 December 2015; pp. 1349–1354. [Google Scholar]
- Wang, Y.J. Research on Working Device Joint Simulation and Static & Dynamic Characteristics of Large Hydraulic Excavators; Taiyuan University of Technology: Taiyuan, China, 2014. [Google Scholar]
- Lin, T.L. Research on the Potential Energy Regeneration System based on the Hydraulic Excavators; Zhejiang University: Hangzhou, China, 2011. [Google Scholar]
- Zheng, T.; He, Y.C. Simulation of hydraulic excavators slewing system based on hydraulic accumulator. In Proceedings of the 2015 International Conference on Fluid Power and Mechatronics (FPM), Harbin, China, 25–26 December 2015; pp. 1063–1066. [Google Scholar]
- Xu, B.; Cheng, M. Motion control of multi-actuator hydraudlic systems for mobile machineries: Recent advancements and future trends. Front. Mech. Eng. 2018, 13, 151–166. [Google Scholar] [CrossRef]










© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, W.; Li, Y.; Li, D. Review on Inlet/Outlet Oil Coordinated Control for Electro-Hydraulic Power Mechanism under Sustained Negative Load. Appl. Sci. 2018, 8, 886. https://doi.org/10.3390/app8060886
Liu W, Li Y, Li D. Review on Inlet/Outlet Oil Coordinated Control for Electro-Hydraulic Power Mechanism under Sustained Negative Load. Applied Sciences. 2018; 8(6):886. https://doi.org/10.3390/app8060886
Chicago/Turabian StyleLiu, Wei, Yunhua Li, and Dong Li. 2018. "Review on Inlet/Outlet Oil Coordinated Control for Electro-Hydraulic Power Mechanism under Sustained Negative Load" Applied Sciences 8, no. 6: 886. https://doi.org/10.3390/app8060886
APA StyleLiu, W., Li, Y., & Li, D. (2018). Review on Inlet/Outlet Oil Coordinated Control for Electro-Hydraulic Power Mechanism under Sustained Negative Load. Applied Sciences, 8(6), 886. https://doi.org/10.3390/app8060886