Distributed Optimal Coordinated Operation for Distribution System with the Integration of Residential Microgrids



Abstract
:1. Introduction
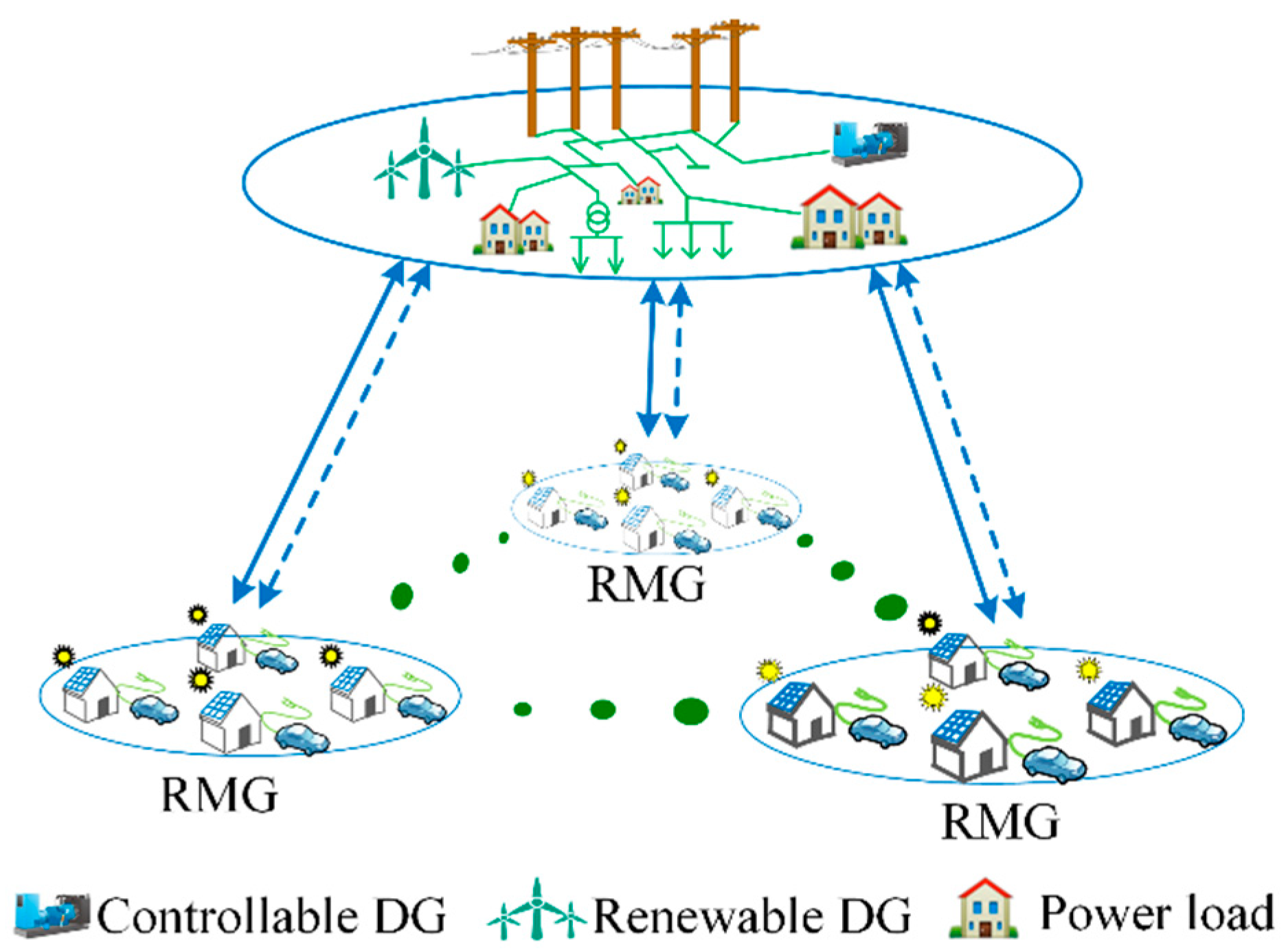
2. Description of Active Distribution Network Integration of Multi-RMGs
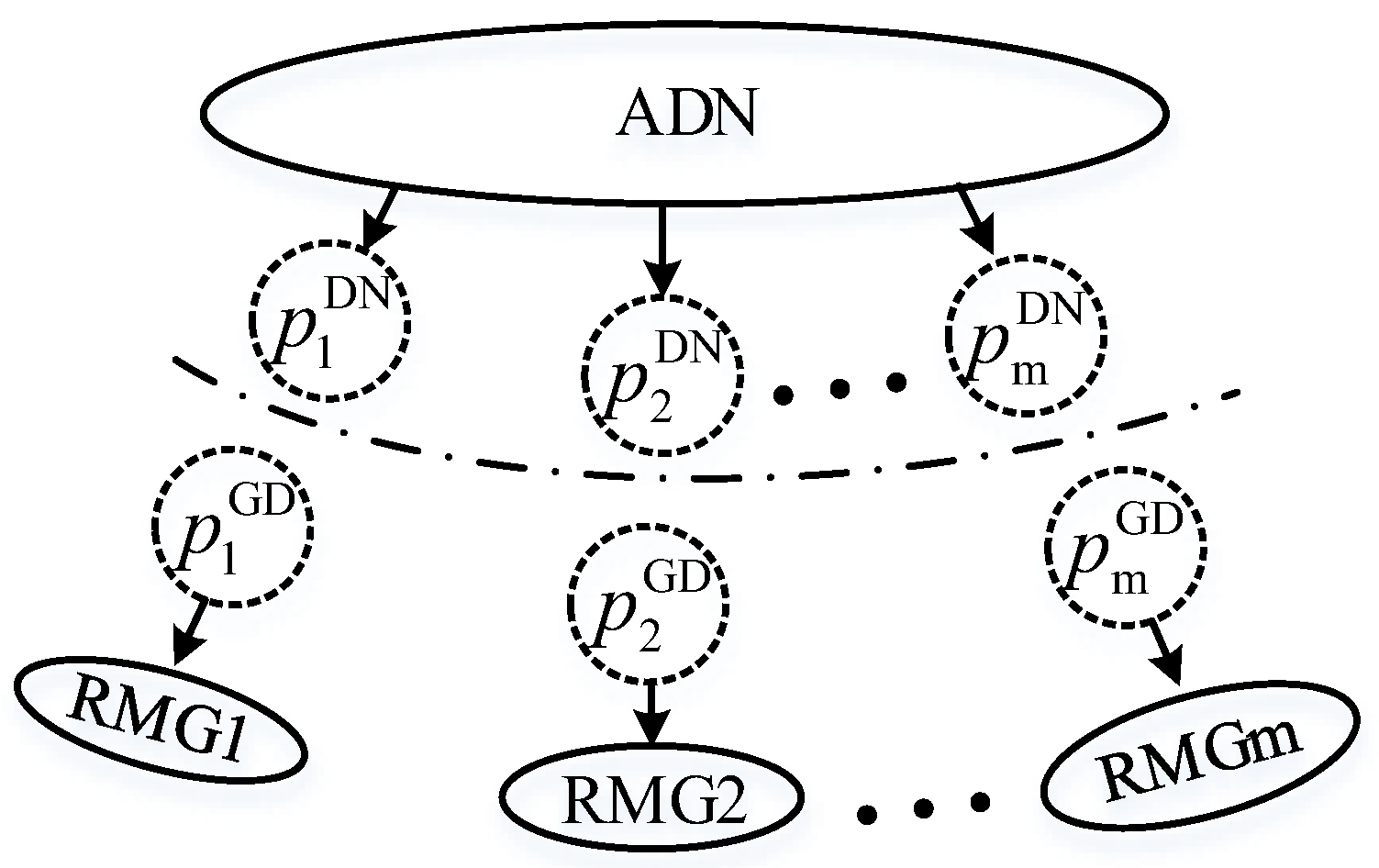
3. ATC-Based Distributed Modeling for Multi-RMGs Integrated in ADN
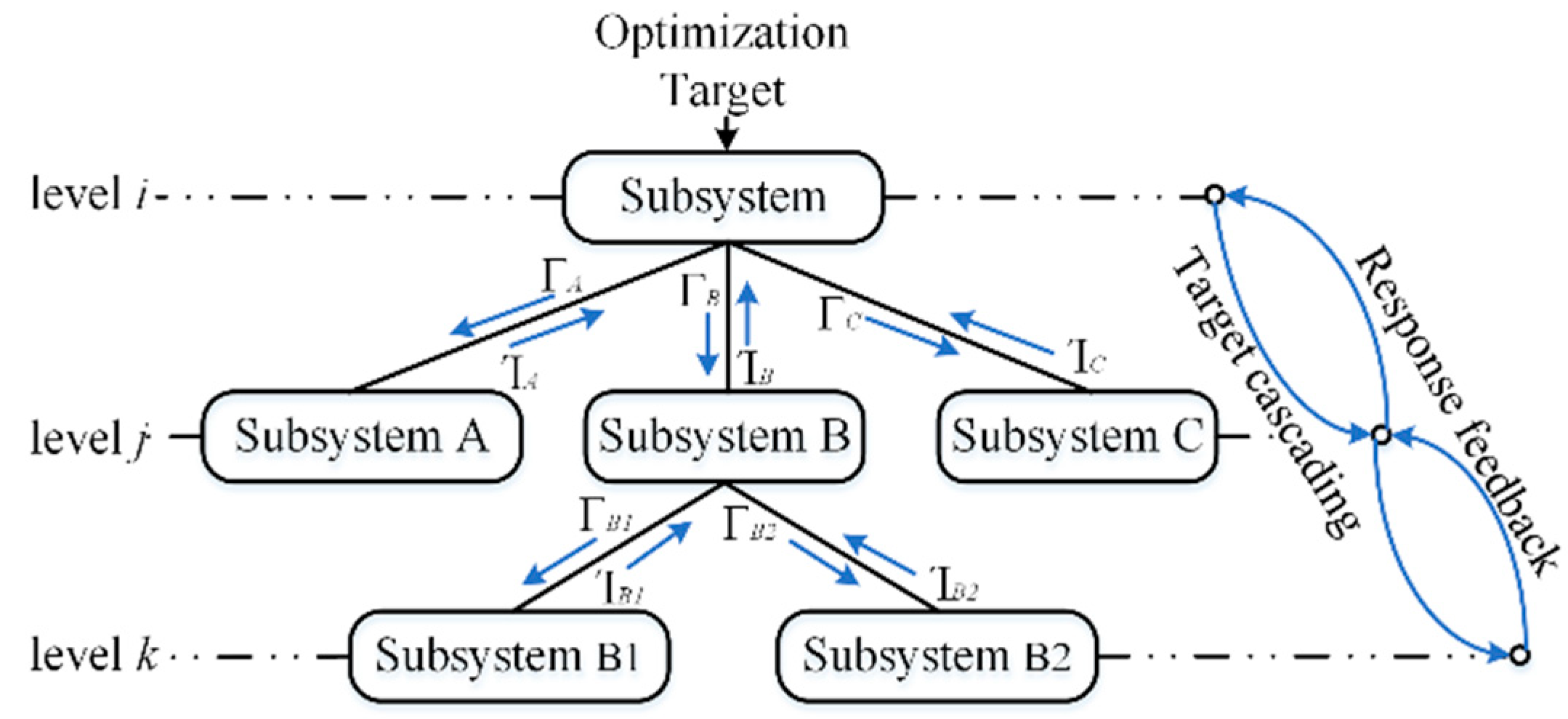
3.1. ATC-based Multilevel Hierarchical Optimization Mechanism
3.2. Optimization Model for RMG
- (1)
- EV load constraintsConstraint (6) describes that a single EV cannot be in charging and discharging state simultaneously. Constraints (7) and (8) denote the minimum and maximum charging/discharging power limits. Constraint (9) limits the minimum and maximum allowable state-of-energy values of the EV. Constraint (10) shows energy stored in the EV in the current time period, which is associated with the energy remaining in the EV in the previous time period. The energy consumed during outdoor driving or the change in the amount of power generated through charging and discharging in the current time period.
- (2)
- Shiftable load constraintsConstraint (11) denotes the shiftable load power limit. Constraint (12) guarantees that each shiftable load, i.e., shiftable household appliance can be scheduled just once over a 24-h time span. Constraint (13) ensures a continuous power supply during the working cycle of the appliance load, top,k denotes the working cycle of appliance load (h).
- (3)
- Rooftop PV power limit
- (4)
- Virtual generator power constraint
- (5)
- Supply–demand balance in RMG
3.3. Optimization Model for ADN
- (1)
- Power balance constraint
- (2)
- Constraint of power transferred from the upstream grid
- (3)
- DG output power constraint
- (4)
- Virtual load power constraint
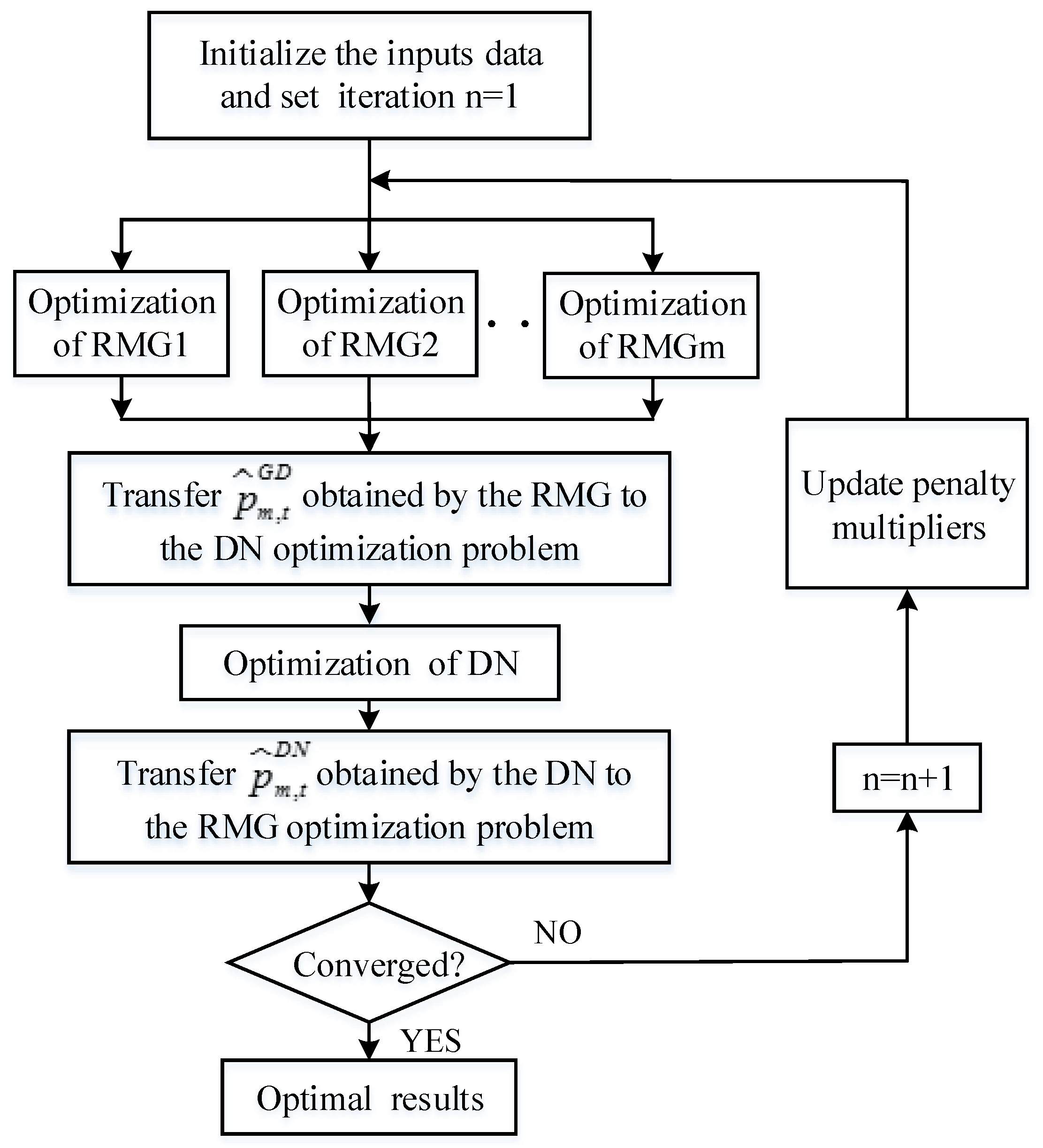
4. The Realization of ATC-Based Distributed Coordinated Optimization
5. The Realization of ATC-Based Distributed Coordinated Optimization
5.1. Test System and Data
5.2. Simulation Results and Discussion
6. Conclusions and Future Works
- Energy consumption behaviors of households are considered to be the same in small-scale residential areas and constant household profiles are adopted, which is simplified. The proposed hierarchical optimization framework will be extended to a stochastic bi-level programming problem considering individual household profiles in our future work, which can be tackled by using the scenario-based optimization approach.
- Energy interactions among the individual household prosumers within RMG while taking into account their differences in energy consumption behaviour will be incorporated into the coordinating energy management between the RMGs and ADN.
- There are stochasticity and uncertainty in loads. Popular optimization techniques such as stochastic optimization and robust optimization [33] to deal with load uncertainty in coordinating energy management is an interesting research topic for further works.
Author Contributions
Funding
Conflicts of Interest
References
- Wu, X.; Hu, X.; Teng, Y.; Qian, S.; Cheng, R. Optimal integration of a hybrid solar-battery power source into smart home nanogrid with plug-in electric vehicle. J. Power Sources 2017, 363, 277–283. [Google Scholar] [CrossRef] [Green Version]
- Luna, A.C.; Diaz, N.L.; Graells, M.; Vasquez, J.C.; Guerrero, J.M. Cooperative energy management for a cluster of households prosumers. IEEE Trans. Consum. Electron. 2016, 62, 235–242. [Google Scholar] [CrossRef] [Green Version]
- Ericson, T. Households’ self-selection of dynamic electricity tariffs. Appl. Energy 2011, 88, 2541–2547. [Google Scholar] [CrossRef]
- Liu, N.; Chen, Q.; Liu, J.; Lu, X.; Li, P.; Lei, J.; Zhang, J. A heuristic operation strategy for commercial building microgrids containing EVs and PV system. IEEE Trans. Ind. Electron. 2015, 62, 2560–2570. [Google Scholar] [CrossRef]
- Pedrasa, M.A.A.; Spooner, T.D.; MacGill, I.F. Coordinated scheduling of residential distributed energy resources to optimize smart home energy services. IEEE Trans. Smart Grid 2010, 1, 134–143. [Google Scholar] [CrossRef]
- Igualada, L.; Corchero, C.; Cruz-Zambrano, M.; Heredia, F.J. Optimal energy management for a residential microgrid including a vehicle-to-grid system. IEEE Trans. Smart Grid 2014, 5, 2163–2172. [Google Scholar] [CrossRef]
- Liu, Y.; Qiu, B.; Fan, X.; Zhu, H.; Han, B. Review of smart home energy management systems. Energy Procedia 2016, 104, 504–508. [Google Scholar] [CrossRef]
- Zhou, B.; Li, W.; Chan, K.W.; Cao, Y.; Kuang, Y.; Liu, X.; Wang, X. Smart home energy management systems: Concept, configurations, and scheduling strategies. Renew. Sustain. Energy Rev. 2016, 61, 30–40. [Google Scholar] [CrossRef]
- Peacock, A.D.; Chaney, J.; Goldbach, K.; Walker, G.; Tuohy, P.; Salvador, S.; Todoli, D.; Owens, H. Co-designing the next generation of home energy management systems with lead-users. Appl. Ergon. 2017, 60, 194–206. [Google Scholar] [CrossRef] [Green Version]
- Jin, X.; Baker, K.; Christensen, D.; Isley, S. Foresee: A user-centric home energy management system for energy efficiency and demand response. Appl. Energy 2017, 205, 1583–1595. [Google Scholar] [CrossRef]
- Ahmad, A.; Khan, A.; Javaid, N.; Hussain, H.M.; Abdul, W.; Almogren, A.; Alamri, A.; Niaz, I.A. An optimized home energy management system with integrated renewable energy and storage resources. Energy 2017, 10, 549. [Google Scholar] [CrossRef]
- Shakeri, M.; Shayestegan, M.; Reza, S.M.S.; Yahya, I.; Bais, B.; Akhtaruzzaman, M.; Sopian, K.; Amin, N. Implementation of a novel home energy management system (HEMS) architecture with solar photovoltaic system as supplementary source. Renew. Energy 2018, 125, 108–120. [Google Scholar] [CrossRef]
- Kriett, P.O.; Salani, M. Optimal control of a residential microgrid. Energy 2012, 42, 321–330. [Google Scholar] [CrossRef]
- Anvari-Moghaddam, A.; Guerrero, J.M.; Vasquez, J.C.; Monsef, H.; Rahimi-Kian, A. Efficient energy management for a grid-tied residential microgrid. IET Gener. Transm. Distrib. 2017, 11, 2752–2761. [Google Scholar] [CrossRef]
- Wu, X.; Wang, Z.; Du, J.; Wu, G. Optimal operation of residential microgrids in the harbin area. IEEE Access 2018, 6, 30726–30736. [Google Scholar] [CrossRef]
- Liu, J.H.; Chu, C.C. Iterative distributed algorithms for real-time available transfer capability assessment of multiarea power systems. IEEE Trans. Smart Grid 2015, 6, 2569–2578. [Google Scholar] [CrossRef]
- Li, Z.; Wu, W.; Zhang, B.; Wang, B. Decentralized multi-area dynamic economic dispatch using modified generalized benders decomposition. IEEE Trans. Power Syst. 2016, 31, 526–538. [Google Scholar] [CrossRef]
- Peng, Q.; Low, S.H. Distributed optimal power flow algorithm for radial networks, I: Balanced single phase case. IEEE Trans. Smart Grid 2018, 9, 111–121. [Google Scholar] [CrossRef]
- Kargarian, A.; Mehrtash, M.; Falahati, B. Decentralized implementation of unit commitment with analytical target cascading: A parallel approach. IEEE Trans. Power Syst. 2018, 33, 3981–3993. [Google Scholar] [CrossRef]
- Kargarian, A.; Fu, Y.; Wu, H. Chance-constrained system of systems based operation of power systems. IEEE Trans. Power Syst. 2016, 31, 3404–3413. [Google Scholar] [CrossRef]
- Mohammadi, A.; Mehrtash, M.; Kargarian, A. Diagonal quadratic approximation for decentralized collaborative TSO + DSO optimal power flow. IEEE Trans. Smart Grid 2018, 10, 2358–2370. [Google Scholar] [CrossRef]
- Kargarian, A.; Mohammadi, J.; Guo, J.; Chakrabarti, S.; Barati, M.; Hug, G.; Kar, S.; Baldick, R. Toward distributed/decentralized DC optimal power flow implementation in future electric power systems. IEEE Trans. Smart Grid 2018, 9, 2574–2594. [Google Scholar] [CrossRef]
- Li, Y.; Ng, B.L.; Trayer, M.; Liu, L. Automated residential demand response: Algorithmic implications of pricing models. IEEE Trans. Smart Grid 2012, 3, 1712–1721. [Google Scholar] [CrossRef]
- Safdarian, A.; Fotuhi-Firuzabad, M.; Lehtonen, M. A distributed algorithm for managing residential demand response in smart grids. IEEE Trans. Ind. Inform. 2014, 10, 2385–2393. [Google Scholar] [CrossRef]
- Juelsgaard, M.; Andersen, P.; Wisniewski, R. Distribution loss reduction by household consumption coordination in smart grids. IEEE Trans. Smart Grid 2014, 5, 2133–2144. [Google Scholar] [CrossRef]
- Li, J.; Zhang, C.; Xu, Z.; Wang, J.; Zhao, J.; Zhang, Y.-J.A. Distributed transactive energy trading framework in distribution networks. IEEE Trans. Power Syst. 2018, 33, 7215–7227. [Google Scholar] [CrossRef]
- Kim, H.M.; Rideout, D.G.; Papalambros, P.Y.; Stein, J.L. Analytical target cascading in automotive vehicle design. J. Mech. Des. 2003, 125, 481–489. [Google Scholar] [CrossRef]
- Michelena, N.; Park, H.; Papalambros, P.Y. Convergence properties of analytical target cascading. AIAA J. 2003, 41, 897–905. [Google Scholar] [CrossRef]
- Gao, H.; Liu, J.; Wang, L.; Wei, Z. Decentralized energy management for networked microgrids in future distribution systems. IEEE Trans. Power Syst. 2018, 33, 3599–3610. [Google Scholar] [CrossRef]
- Low, S.H. Convex relaxation of optimal power flow part I: Formulations and equivalence. IEEE Trans. Control Netw. Syst. 2014, 1, 15–27. [Google Scholar] [CrossRef]
- ILOG CPLEX Homepage. [Online]. 2018. Available online: http://www.ilog.com (accessed on 6 May 2018).
- Tosserams, S.; Etman, L.F.P.; Papalambros, P.Y.; Rooda, J.E. An augmented Lagrangian relaxation for analytical target cascading using the alternating direction method of multipliers. Struct. Multidiscip. Optim. 2006, 31, 176–189. [Google Scholar] [CrossRef] [Green Version]
- Chen, Z.; Wu, L.; Fu, Y. Real-time price-based demand response management for residential appliances via stochastic optimization and robust optimization. IEEE Trans. Smart Grid 2012, 3, 1822–1831. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Energy Cost | Un-Optimized Case | Proposed Energy Coordinated Mode |
|---|---|---|
| Inflexible loads | 7.7 | 7.7 |
| EV charging + Flexible loads | 9.93 | 3.06 |
| PV Generation | −0.5 | −0.5 |
| V2H | 0 | −5.22 |
| Daily energy cost | 17.13 | 5.02 |
| Comparison Item | Un-Optimized Case | Optimal Coordinated Operation Mode |
|---|---|---|
| Operation cost ($) | 37,597 | 21,911 |
| Power loss (kW) | 5812 | 4767 |
| Total Objective Function fdis (Proposed Method) | Total Objective Function fcen (Centralized Method) | Relative Error (fdis − fcen)/fcen |
|---|---|---|
| $26,519 | $26,137 | 0.0146 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, J.; Li, K.-J.; Javid, Z.; Sun, Y. Distributed Optimal Coordinated Operation for Distribution System with the Integration of Residential Microgrids. Appl. Sci. 2019, 9, 2136. https://doi.org/10.3390/app9102136
Wang J, Li K-J, Javid Z, Sun Y. Distributed Optimal Coordinated Operation for Distribution System with the Integration of Residential Microgrids. Applied Sciences. 2019; 9(10):2136. https://doi.org/10.3390/app9102136
Chicago/Turabian StyleWang, Jingshan, Ke-Jun Li, Zahid Javid, and Yuanyuan Sun. 2019. "Distributed Optimal Coordinated Operation for Distribution System with the Integration of Residential Microgrids" Applied Sciences 9, no. 10: 2136. https://doi.org/10.3390/app9102136