Intelligent Thermal Imaging-Based Diagnostics of Turbojet Engines

 ,
,  ,
, 
 ,
, 
Abstract
Featured Application
Abstract
1. Introduction
2. Methodology
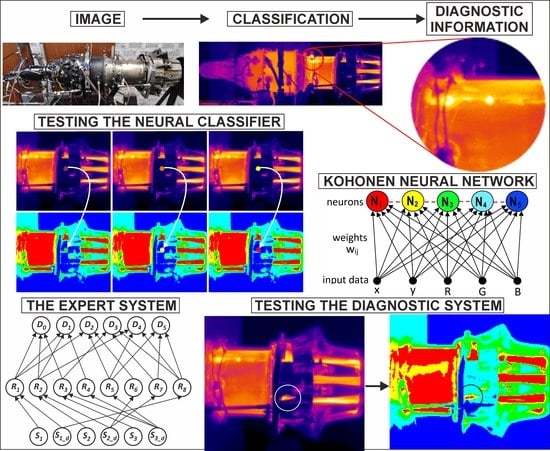
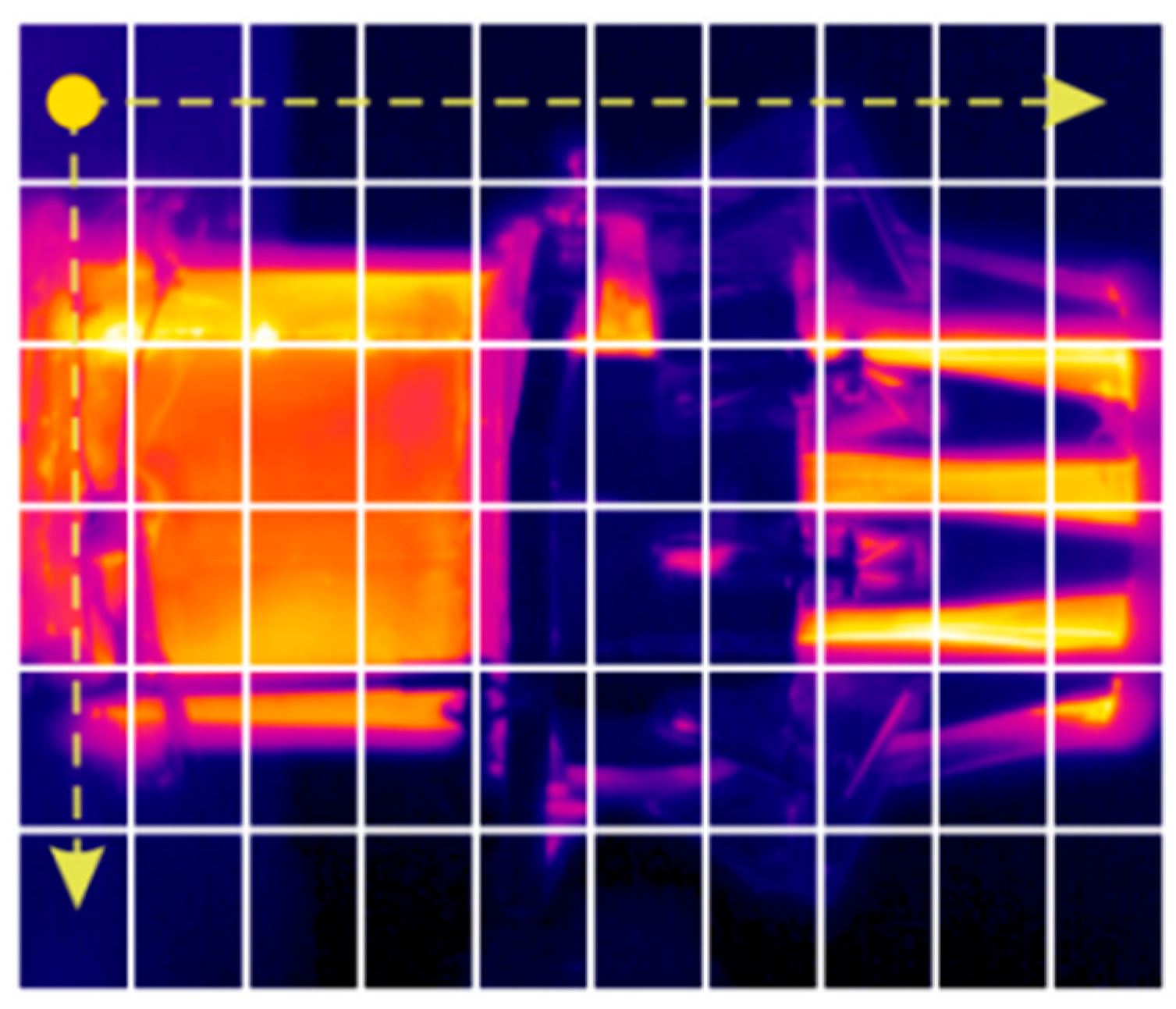
2.1. Using Infrared Imaging for Diagnostics
- Image: an object to be captured by a thermal camera.
- Classification: monitoring the object, scanning it, obtaining infrared data, classifying hot and cold parts as well as possible problematic areas.
- Diagnostic information: evaluating infrared thermal images, for example, identifying defects or deficiencies, deciding about the technical state of the engine.
- Image processing classification system: involving a SOFM.
- Knowledge acquisition system: an expert system for the evaluation of the technical state of an engine.
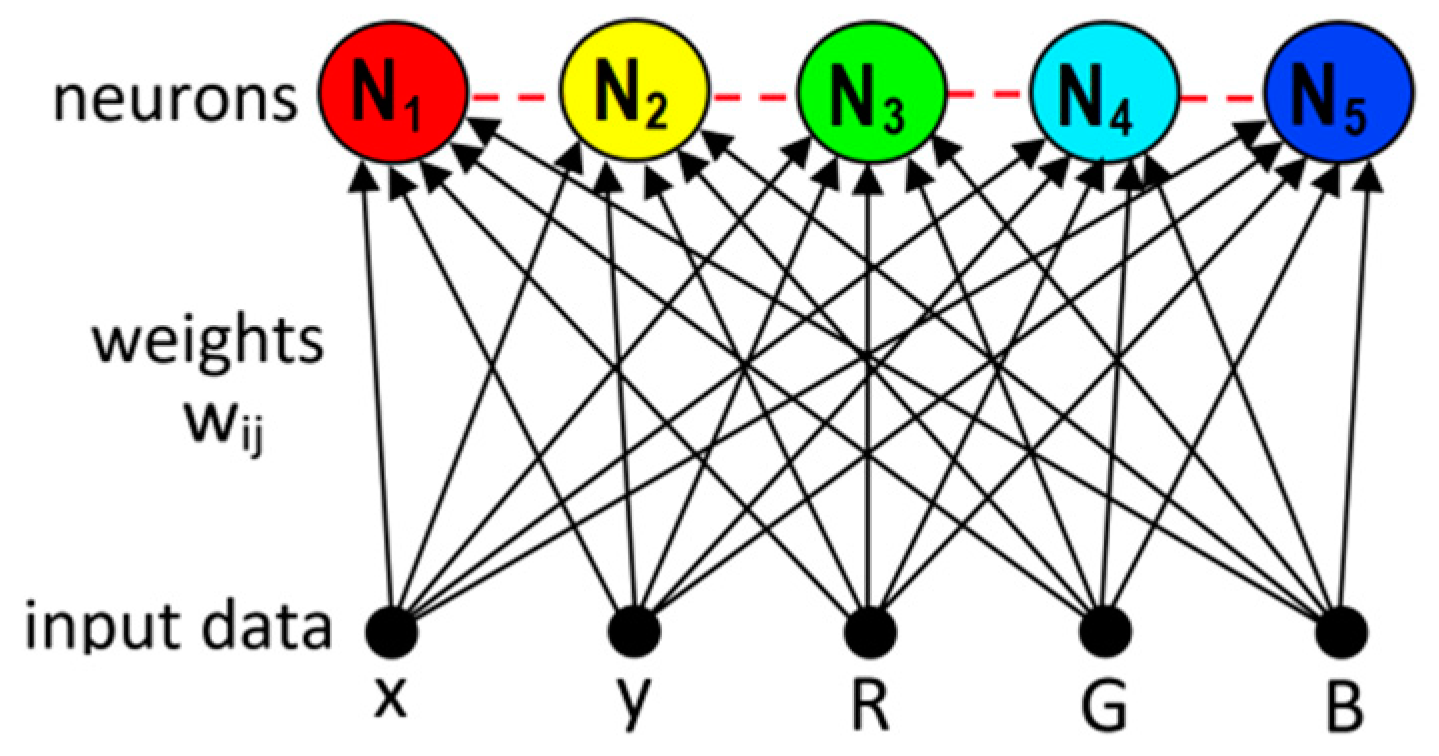
2.2. Self-Organizing Feature Maps in Image Segmentation and Classification
- Initialization: Random values are set for all neuron weights. The input vector from the input space is selected.
- Competition: From the inputs, the discriminant function (Equation (1), below) of a particular neuron is computed. A Kohonen unit computes the Euclidean distance between an input xi and its weight vector wij. The winning neuron is the one with the smallest value of the discriminant function.
- Cooperation: The winning neuron influences its adjacent neurons (i.e., the weight vectors of adjacent neurons are influenced), however this influence decreases with increasing distance to other neurons.
- Adaptation: The excited neurons decrease their values of the discriminant function in relation to the input pattern through adjustment of the associated weights. The response of the winning neuron to the subsequent application of a similar input pattern is enhanced. The process will stop if the maximum number of iterations is reached.
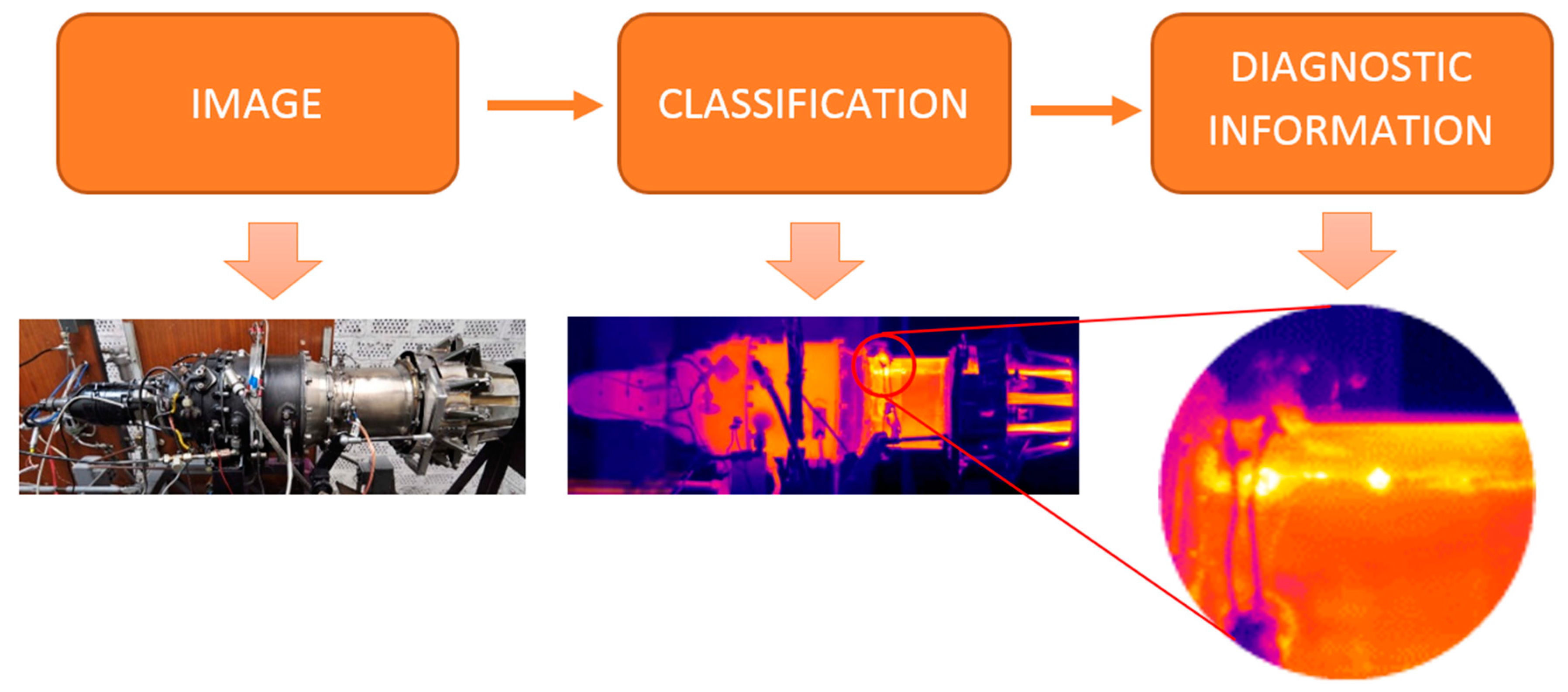
2.3. Expert Diagnostic Systems
2.4. Experimental Setup for Design of the Infrared Imaging-Based Diagnostics System
- n (rpm)—speed of the engine’s shaft.
- T2 (°C)—air temperature at the output of the radial compressor.
- T3 (°C)—gas temperature at the input to the gas turbine.
- T4 (°C)—gas temperature at the output of the gas turbine.
3. Thermal Image Segmentation and Classification
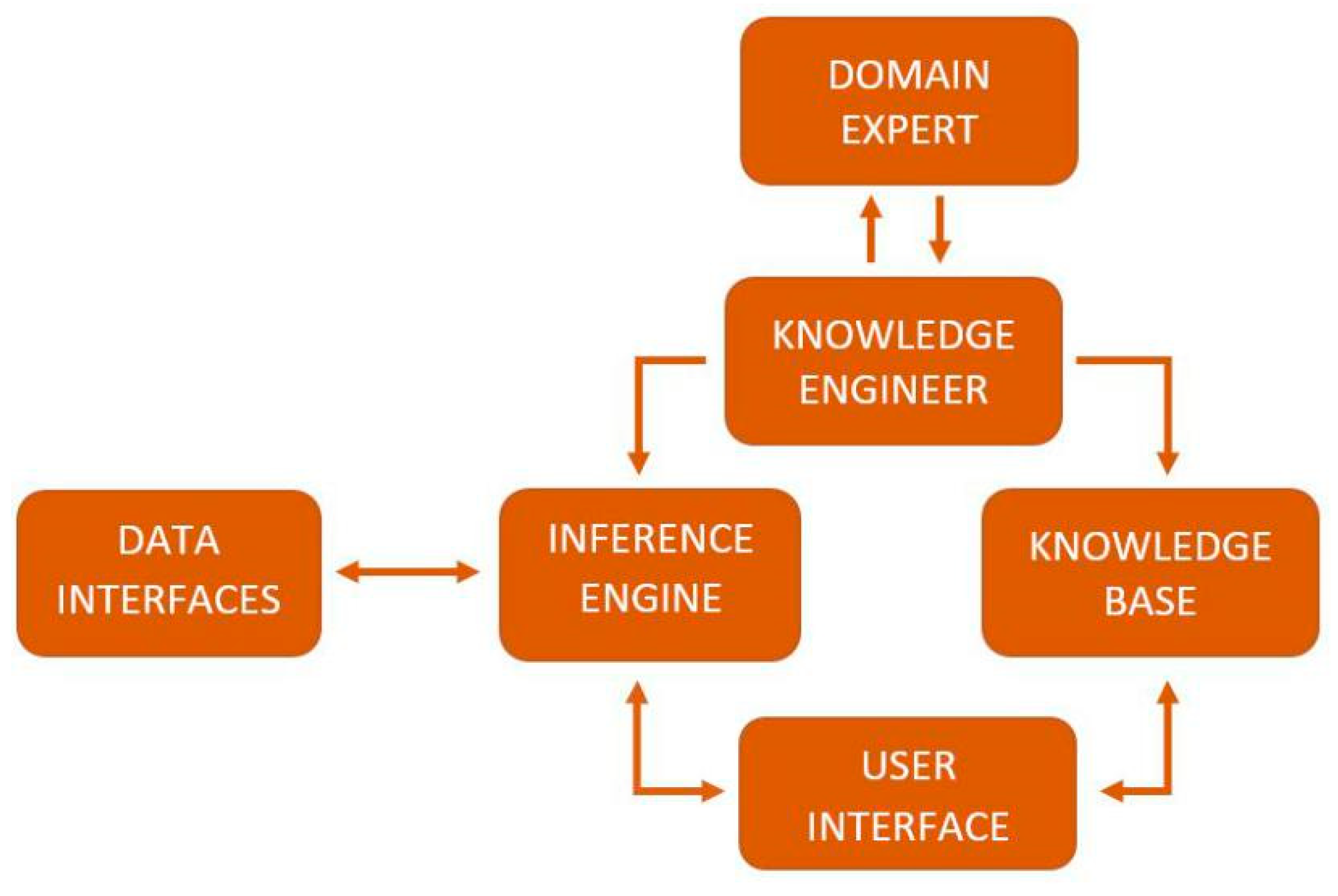
3.1. Design and Training of the Kohonen Self-Organizing Feature Map
- N1: the hottest and most critical part of the IRT image, red.
- N2: a hot and critical part of the IRT image, yellow.
- N3: a hot and non-critical part of the IRT image, green.
- N4: a low-temperature and non-critical part, cyan.
- N5: the temperature of the surrounding objects (not a part of the diagnosed object), blue.
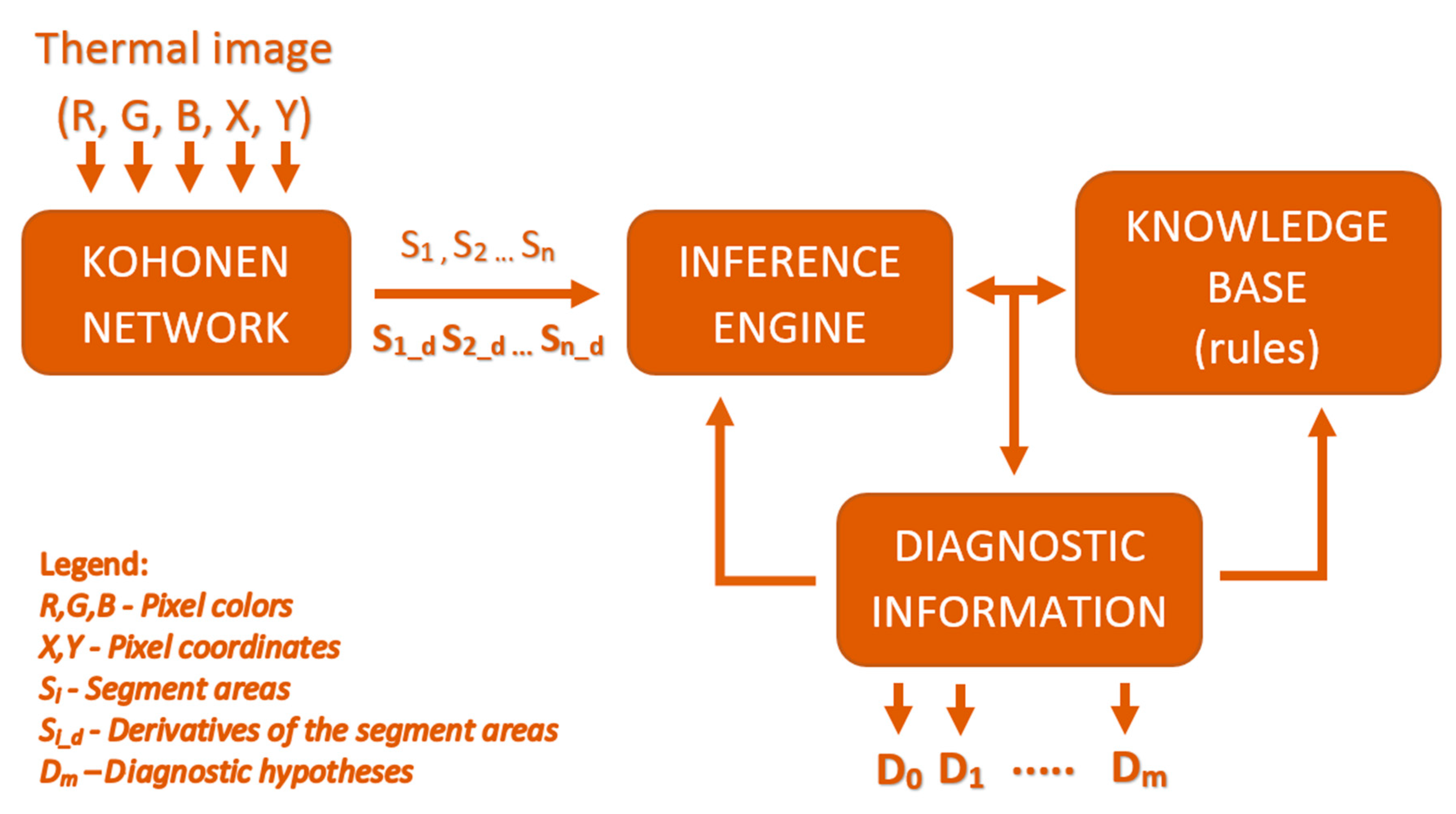
3.2. Classification System Testing and Results
4. Expert Diagnostic System Design Based on Infrared Images
4.1. Design of the Expert System
4.2. Pilot Testing of the Expert System Using Infrared Thermography (IRT) Inputs
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Osornio-Rios, R.A.; Antonino-Daviu, J.A.; Jesus Romero-Troncoso, R. Recent Industrial Applications of Infrared Thermography: A Review. IEEE Trans. Ind. Inform. 2019, 15, 615–625. [Google Scholar] [CrossRef]
- Lahiri, B.B.; Bagavathiappan, S.; Jayakumar, T.; Philip, J. Medical applications of infrared thermography: A review. Infrared Phys. Technol. 2012, 55, 221–235. [Google Scholar] [CrossRef]
- Balaras, C.A.; Argiriou, A.A. Infrared thermography for building diagnostics. Energy Build. 2002, 34, 171–183. [Google Scholar] [CrossRef]
- Lisowska, A. Thermographic monitoring of the power transformers. Meas. Autom. Monit. 2017, 63, 154–157. [Google Scholar]
- López-Pérez, D.; Antonino-Daviu, J. Application of Infrared Thermography to Failure Detection in Industrial Induction Motors: Case Stories. IEEE Trans. Ind. Appl. 2017, 53, 1901–1908. [Google Scholar] [CrossRef]
- Yang, R.; He, Y.; Mandelis, A.; Wang, N.; Wu, X.; Huang, S. Induction Infrared Thermography and Thermal-Wave-Radar Analysis for Imaging Inspection and Diagnosis of Blade Composites. IEEE Trans. Ind. Inform. 2018, 14, 5637–5647. [Google Scholar] [CrossRef]
- Vavilov, V.; Nesteruk, D.A. Detecting water in aviation honeycomb structures: The quantitative approach. Quant. Infrared Thermogr. J. 2004, 1, 173–184. [Google Scholar] [CrossRef]
- Vavilov, V.; Pan, Y.Y.; Nesteruk, D. Infrared thermographic inspection of water ingress in composite honeycomb panels. Appl. Opt. 2016, 55, 120–125. [Google Scholar] [CrossRef] [PubMed]
- Vavilov, V.P. Non-contact one-sided evaluation of hidden corrosion in metallic constructions by using transient infrared thermography. Rev. Metal. 2003, 39, 235–242. [Google Scholar] [CrossRef]
- Eddazi, A.; Belattar, S. Nondestructive Testing Evaluation of Aircraft Fuselage Corrosion by Infrared Thermography and Finite Element Method. In Proceedings of the 14th International Conference on Computer Graphics, Imaging and Visualization, Marrakesh, Morocco, 23–25 May 2017. [Google Scholar]
- Addepalli, S.; Zhao, Y.; Roy, R.; Galhenege, W.; Colle, M.; Yu, J.; Ucur, A. Non-destructive evaluation of localised heat damage occurring in carbon composites using thermography and thermal diffusivity measurement. Measurement 2019, 131, 706–713. [Google Scholar] [CrossRef]
- Meola, C.; Boccardi, S.; Carlomagno, G.M. Infrared Thermography in the Evaluation of Aerospace Composite Materials: Infrared Thermography to Composites; Woodhead Publishing: Cambridge, UK, 2016. [Google Scholar]
- Swiderski, W. IR Thermography Nondestructive Testing Methods of Composite Materials Used in Aerospace Applications. In Proceedings of the 12th International Conference on Quantitative Infrared Thermography, The e-Journal of Nondestructive Testing, Mahabalipuram, India, 6–10 July 2016. [Google Scholar]
- Orton, B.R.; Copaul, M.; Velez-Ospina, C.E. Potential use of infrared thermography to detect aircraft pressurization leaks. Insight Non-Destr. Test. Cond. Monit. 1999, 41, 164–166. [Google Scholar]
- Wang, Y.; Gao, B.; Lok Woo, W.; Tian, G.; Maldague, X.; Zheng, L.; Guo, Z.; Zhu, Y. Thermal Pattern Contrast Diagnostic of Microcracks With Induction Thermography for Aircraft Braking Components. IEEE Trans. Ind. Inform. 2018, 14, 5563–5574. [Google Scholar] [CrossRef]
- White, J.E.; Tucholski, E.J.; Green, R.E. Nondestructive Testing of Aircraft and Spacecraft Wiring. Mater. Eval. 2003, 61, 1315–1320. [Google Scholar]
- Tulloch, J.S.; Jennings, M.C. Thermographic Wiring Inspection. U.S. Patent No. US 6,995,565 B1, 7 February 2006. [Google Scholar]
- Short, M.; Torres, J.; Kreckie, J. Thermal Imaging for Aircraft Rescue and Fire Fighting Applications; DOT/FAA/TC-17/27 Final Report; U.S. Department of Transportation, Federal Aviation Administration: Cambridge, MA, USA, 2017.
- Štumper, M.; Kraus, J. Thermal Imaging in Aviation. Mag. Aviat. Dev. 2015, 3, 13–16. [Google Scholar] [CrossRef]
- Matikainen, L.; Lehtomäki, M.; Ahokas, E.; Hyyppä, J.; Karjalainen, M.; Jaakkola, A.; Kukko, A.; Heinonen, T. Remote sensing methods for power line corridor surveys. ISPRS J. Photogramm. Remote Sens. 2016, 119, 10–31. [Google Scholar] [CrossRef]
- Gómez, C.; Green, D.R. Small unmanned airborne systems to support oil and gas pipeline monitoring and mapping. Arab. J. Geosci. 2017, 10, 202. [Google Scholar] [CrossRef]
- Kylili, A.; Fokaides, P.A.; Christou, P.; Kalogirou, S.A. Infrared thermography (IRT) applications for building diagnostics: A review. Appl. Energy 2014, 134, 531–549. [Google Scholar] [CrossRef]
- Omar, T.; Nehdi, M.L. Remote sensing of concrete bridge decks using unmanned aerial vehicle infrared thermography. Autom. Constr. 2017, 83, 360–371. [Google Scholar] [CrossRef]
- Harvey, M.C.; Rowland, J.; Luketina, K.M. Drone with Thermal Infrared Camera Provides high resolution georeferenced imagery of the Waikite Geothermal Area, New Zealand. J. Volcanol. Geotherm. Res. 2016, 325, 61–69. [Google Scholar] [CrossRef]
- Baranwal, N.; Mahulikar, S.P. Infrared Signature of Aircraft Engine with Choked Converging Nozzl. J. Thermophys. Heat Transf. 2016, 30, 1–9. [Google Scholar] [CrossRef]
- Ciampa, F.; Mahmoodi, P.; Pinto, F.; Meo, M. Recent Advances in Active Infrared Thermography for Non-Destructive Testing of Aerospace Components. Sensors 2018, 18, 609. [Google Scholar] [CrossRef]
- MacLeod, J.D.; Steckhan, P.; He, D. Infrared Thermal Imaging System as a Diagnostic Tool for Gas Turbine Engine Faults. In ASME 1994, International Gas Turbine and Aeroengine Congress and Exposition; American Society of Mechanical Engineers (ASME): New York, NY, USA, 1994; Volume 2. [Google Scholar]
- Bogdan, M.; Błachnio, J.; Kułaszka, A.; Derlatka, M. Assessing the Condition of Gas Turbine Rotor Blades with the Optoelectronic and Thermographic Methods. Metals 2019, 9, 31. [Google Scholar] [CrossRef]
- Yang, X.; Pang, S.; Shen, W.; Lin, X.; Jiang, K.; Wang, Y. Aero Engine Fault Diagnosis Using an Optimized Extreme Learning Machine. Int. J. Aerosp. Eng. 2016, 2016. [Google Scholar] [CrossRef]
- Ntantis, E.; Botsaris, P. Diagnostic Methods for an Aircraft Engine Performance. J. Eng. Sci. Technol. Rev. 2015, 8, 64–72. [Google Scholar] [CrossRef]
- Rajani, J. Engine Health Condition Monitoring—A Brief Review. Control Data Fusion E J. 2017, 1, 25–38. [Google Scholar]
- Armstrong, J.B.; Simon, D.L. Implementation of an Integrated On-Board Aircraft Engine Diagnostic Architecture. In Proceedings of the 47th Joint Propulsion Conference and Exhibit cosponsored by the AIAA, ASME, SAE, and ASEE, San Diego, CA, USA, 31 July 2011–3 August 2011. [Google Scholar]
- Rabenoro, T.; Lacaille, J.; Cottrell, M.; Rossi, F. A Methodology for the Diagnostic of Aircraft Engine Based on Indicators Aggregation. In Proceedings of the CDM 2014: Advances in Data Mining, Applications and Theoretical Aspects, St. Petersburg, Russia, 16–20 July 2014; Volume 8557, pp. 144–158. [Google Scholar]
- Seabra, J.; Campos, A. EHD Analysis of a Roller/Inner Ring Contact in a Jet Engine Roller Bearing. In Proceedings of the 82nd Meeting of the AGARD Structures and Materials Panel, Sesimbra, Portugal, 6–7 May 1996; Volume 589. [Google Scholar]
- Zaitouna, N.M.; Aqel, M.J. Survey on Image Segmentation Techniques. Procedia Comput. Sci. 2015, 65, 797–806. [Google Scholar] [CrossRef]
- Karamizadeh, S.; Abdullah, S.M.; Zamani, M.; Kherikhah, A. Pattern Recognition Techniques: Studies on Appropriate Classifications. ARPN J. Eng. Appl. Sci. 2014, 9, 791–799. [Google Scholar]
- Spontón, H.; Cardelino, J. A Review of Classic Edge Detectors. Image Process. Line 2015, 5, 90–123. [Google Scholar] [CrossRef]
- Egmont-Petersen, M.; Ridder, D.; Handels, H. Image processing with neural networks—A review. Pattern Recognit. 2002, 35, 2279–2301. [Google Scholar] [CrossRef]
- Vardasca, R.; Vaz, L.; Mendes, J. Classification and Decision Making of Medical Infrared Thermal Images. In Classification in BioApps; Lecture Notes in Computational Vision and Biomechanics; Dey, N., Ashour, A., Borra, S., Eds.; Springer: Cham, Switzerland, 2018; Volume 26. [Google Scholar]
- Zhiqiang, W.; Jun, L. A review of object detection based on convolutional neural network. In Proceedings of the 2017 36th Chinese Control Conference (CCC), Dalian, China, 26–28 July 2017. [Google Scholar]
- Rawat, W.; Wang, Z. Deep Convolutional Neural Networks for Image Classification: A Comprehensive Review. Neural Comput. 2017, 29, 1–98. [Google Scholar] [CrossRef]
- Kohonen, T. Self-Organizing Maps, 3rd ed.; Springer: Berlin/Heidelberg, Germany, 2001. [Google Scholar]
- Kohonen, T. MATLAB Implementations and Applications of the Self-Organizing Map; Unigrafia Oy: Helsinki, Finland, 2014. [Google Scholar]
- Zimmermann, R.; Brandmeier, M.; Andreani, L.; Mhopjeni, K.; Gloaguen, R. Remote Sensing Exploration of Nb-Ta-LREE-Enriched Carbonatite (Epembe/Namibia). Remote Sens. 2016, 8, 620. [Google Scholar] [CrossRef]
- Kim, S.; Singh, V.P. Spatial Disaggregation of Areal Rainfall Using Two Different Artificial Neural Networks Models. Water 2015, 7, 2707–2727. [Google Scholar] [CrossRef]
- Chi, D. Self-Organizing Map-Based Color Image Segmentation with k-Means Clustering and Saliency Map. ISRN Signal Process. 2011, 2011. [Google Scholar] [CrossRef]
- Xu, Y.; Ran, J.; Chen, H. Kohonen Neural Network Classification for Failure Process of Metallic Organic Coating in Corrosion Environment. Metals 2017, 7, 147. [Google Scholar]
- Ganguli, R. Gas Turbine Diagnostics: Signal Processing and Fault Isolation; CRC Press: Boca Raton, FL, USA, 2013. [Google Scholar]
- Li, Y.G. Performance Analysis Based Gas Turbine Diagnostics: A Review. Proc. Inst. Mech. Eng. Part A J. Power Energy 2002, 216, 363–377. [Google Scholar] [CrossRef]
- Mohammadi, E.; Montazeri-Gh, M. Performance Enhancement of Global Optimization-Based Gas Turbine Fault Diagnosis Systems. J. Propuls. Power 2016, 32, 214–224. [Google Scholar] [CrossRef]
- Li, Z.; Zhong, S.-S.; Lin, L. Novel Gas Turbine Fault Diagnosis Method Based on Performance Deviation Model. J. Propuls. Power 2017, 33, 730–739. [Google Scholar] [CrossRef]
- Meskin, N.; Naderi, E.; Khorasani, K. A Multiple Model-Based Approach for Fault Diagnosis of Jet Engines. IEEE Trans. Control Syst. Technol. 2013, 21, 254–262. [Google Scholar] [CrossRef]
- Vanini, Z.N.S.; Khorasani, K.; Meskin, N. Fault detection and isolation of a dual spool gas turbine engine using dynamic neural networks and multiple model approach. Inf. Sci. 2014, 259, 234–251. [Google Scholar] [CrossRef]
- Szentkuti, A.; Kavanagh, H.S.; Grazio, S. Infrared thermography and image analysis for biomedical use. Period. Biol. 2011, 113, 385–392. [Google Scholar]
- Rojas, R. Neural Networks—A Systematic Introduction; Springer: Berlin, Germany; New York, NY, USA, 1996. [Google Scholar]
- Abraham, A. Handbook of Measuring System: Design Rule-Based Expert Systems; John Wiley & Sons: New York, NY, USA, 2005. [Google Scholar]
- Buchanan, B.G.; Smith, R.G. Fundamentals of Expert Systems. Annu. Rev. Comput. Sci. 1988, 3, 23–58. [Google Scholar] [CrossRef]
- Yang, J.; Ye, C.; Zhang, X. An expert system shell for fault diagnosis. Robotica 2001, 19, 669–674. [Google Scholar] [CrossRef]
- Chlebus, E.; Krot, K.; Kuliberda, M. Hybrid Artificial Intelligent Systems: Rule-Based Expert System Dedicated for Technological Applications; Springer: Berlin/Heidelberg, Germany, 2011; pp. 373–380. [Google Scholar]
- Dvořák, J. Expertní Systémy; Vysoké Učení Technické v Brne: 2004. Available online: http://www.uai.fme.vutbr.cz/~jdvorak/Opory/ExpertniSystemy.pdf (accessed on 22 February 2019).
- Sinha, A.P.; Zhao, H. Tuning Expert Systems for Cost-Sensitive Decisions. Adv. Artif. Intell. 2011, 2011. [Google Scholar] [CrossRef]
- Andoga, R.; Főző, L.; Judičák, J.; Bréda, R.; Szabo, S.; Rozenberg, R.; Džunda, M. Intelligent Situational Control of Small Turbojet Engines. Int. J. Aerosp. Eng. 2018, 2018. [Google Scholar] [CrossRef]
- Cruz-Albarran, I.A.; Benitez-Rangel, J.P.; Osornio-Rios, R.; Dominguez, B.T.; Medina, D.A.R.; Morales-Hernández, L.A. A new approach to obtain a colour palette in thermographic images. Quant. InfraRed Thermogr. J. 2019, 16, 35–54. [Google Scholar] [CrossRef]
- Roman, R.-C.; Radac, M.-B.; Precup, R.-E.; Petriu, E.M. Data-driven Model-Free Adaptive Control Tuned by Virtual Reference Feedback Tuning. Acta Polytech. Hung. 2016, 13, 83–96. [Google Scholar] [CrossRef]
- Andoga, R.; Adamčík, F.; Hrabovský, J.; Vaispacher, T. A hybrid diagnostic system for a small turbojet engine. NASE More 2016, 63, 86–92. [Google Scholar] [CrossRef]





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Topology function | Grid |
| Distance computation | Direct |
| Initial neighborhood size | 3 |
| Initial learning rate | 0.9 |
| Training iterations | 500 |
| Actual Class | ||||||
|---|---|---|---|---|---|---|
| N1 | N2 | N3 | N4 | N5 | ||
| Predicted Class | N1 | 286 | 5 | 2 | 0 | 0 |
| N2 | 10 | 284 | 15 | 1 | 0 | |
| N3 | 4 | 10 | 272 | 4 | 6 | |
| N4 | 0 | 1 | 10 | 275 | 34 | |
| N5 | 0 | 0 | 1 | 20 | 260 | |
| Accuracy | 95.3% | 94.6% | 90.6% | 91.6% | 86% | |
| Total Accuracy | 91.8% (1377/1500) | |||||
| IF | S1 | IS | <13,200; 13,300> | AND | S1_d is <−5; 50 > | => R1 |
| IF | S2 | IS | <3600; 3700> | AND | S2_d is <−10; 30> | => R2 |
| IF | S3 | IS | <7300; 7420> | AND | S3_d is <−5 ; 45> | => R3 |
| IF | S3_d | IS | <46; 160 > | – | – | => R4 |
| IF | S3_d | IS | <−85; −6> | – | – | => R5 |
| IF | S2_d | IS | <31; 140> | – | – | => R6 |
| IF | S2_d | IS | <−120; −11> | – | – | => R7 |
| IF | S1_d | IS | <51; 160> | – | – | => R8 |
| D0 | Normal condition |
| D1 | Light overheating |
| D2 | Moderate overheating |
| D3 | Critical overheating |
| D4 | Light structural defect |
| D5 | Critical structural defect |
| IF | R1 | AND | R2 | AND | R3 | => D0 |
| IF | R1 | AND | R2 | AND | R4 | => D1 |
| IF | R1 | AND | R5 | AND | R6 | => D2 |
| IF | R3 | AND | R7 | AND | R8 | => D3 |
| IF | R2 | AND | R5 | AND | R8 | => D4 |
| IF | R5 | AND | R7 | AND | R8 | => D5 |
 |  | D0—normal condition R1: S1 = 13,270 AND S1_d = 20 R2: S2 = 3628 AND S2_d = 14 R3: S3 = 7374, AND S3_d = 24 R1 AND R2 AND R3 => D0 |
 |  | D1—light overheating R1: S1 = 13,227 AND S1_d = 31 R2: S2 = 3643 AND S2_d = −5 R4: S3_d = 112 R1 AND R2 AND R4 => D1 |
 |  | D4—light structural defect R2: S2 = 3671 AND S2_d = 3 R5: S3_d = −67 R8: S1_d = 92 R2 AND R5 AND R8 => D4 |
 |  | D5—critical structural defect R5: S3_d = −72 R7: S2_d = −45 R8: S1_d = 118 R5 AND R7 AND R8 => D5 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Andoga, R.; Főző, L.; Schrötter, M.; Češkovič, M.; Szabo, S.; Bréda, R.; Schreiner, M. Intelligent Thermal Imaging-Based Diagnostics of Turbojet Engines. Appl. Sci. 2019, 9, 2253. https://doi.org/10.3390/app9112253
Andoga R, Főző L, Schrötter M, Češkovič M, Szabo S, Bréda R, Schreiner M. Intelligent Thermal Imaging-Based Diagnostics of Turbojet Engines. Applied Sciences. 2019; 9(11):2253. https://doi.org/10.3390/app9112253
Chicago/Turabian StyleAndoga, Rudolf, Ladislav Főző, Martin Schrötter, Marek Češkovič, Stanislav Szabo, Róbert Bréda, and Michal Schreiner. 2019. "Intelligent Thermal Imaging-Based Diagnostics of Turbojet Engines" Applied Sciences 9, no. 11: 2253. https://doi.org/10.3390/app9112253
APA StyleAndoga, R., Főző, L., Schrötter, M., Češkovič, M., Szabo, S., Bréda, R., & Schreiner, M. (2019). Intelligent Thermal Imaging-Based Diagnostics of Turbojet Engines. Applied Sciences, 9(11), 2253. https://doi.org/10.3390/app9112253