Multi-Constraint Optimized Planning of Tasks on Virtualized-Service Pool for Mission-Oriented Swarm Intelligent Systems

 , , ,
, , ,
Abstract
:1. Introduction
2. Related Work and Literature
2.1. Swarm Intelligence Theories
2.2. Mechanisms for Mission-Level Cooperation
2.3. Resource Sharing and Virtualization
3. Cooperation Architecture and Models
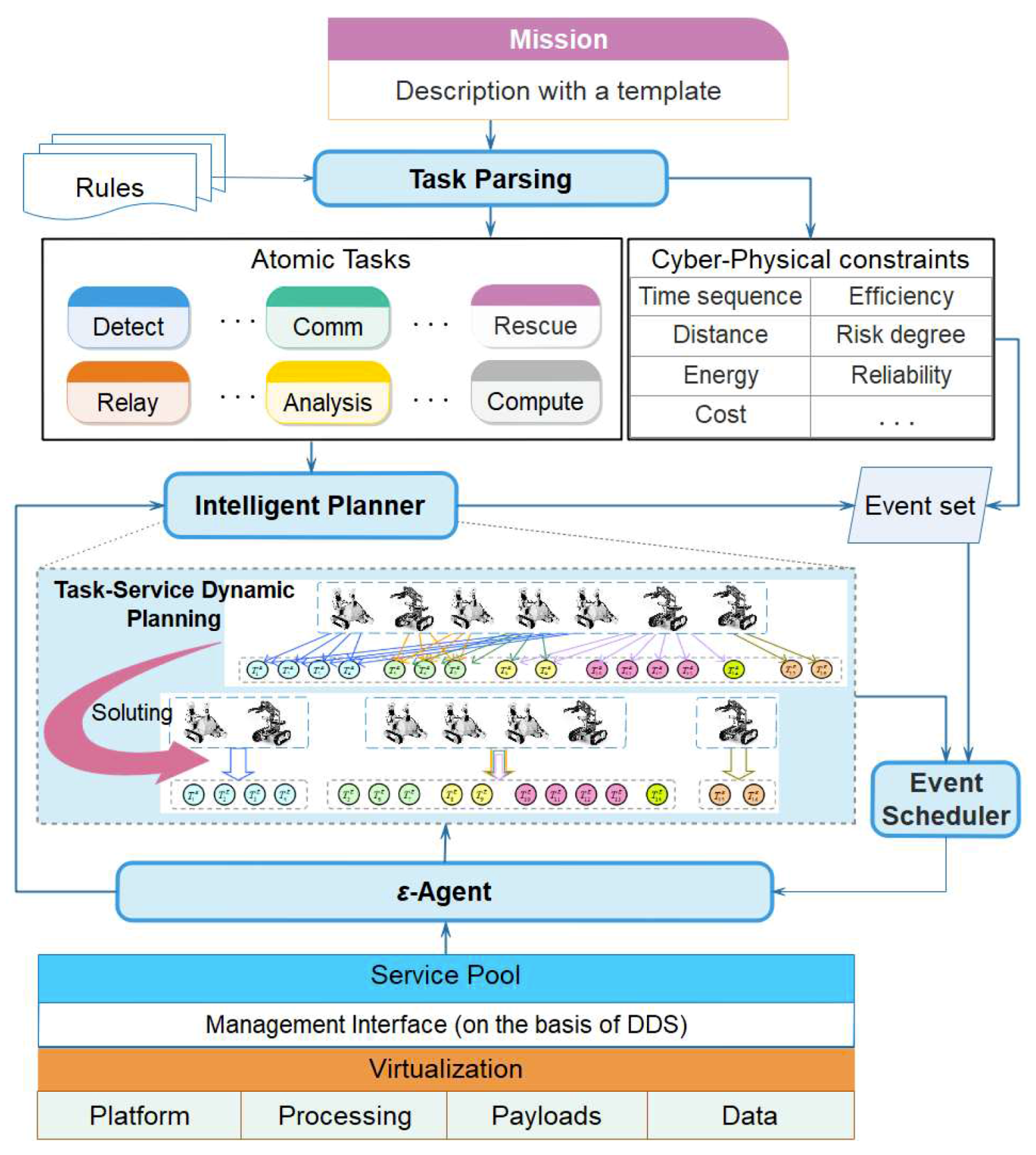
3.1. Virtualized-Service and Event Based Cooperation Architecture
3.2. Hierarchical Task Model
3.3. Service and Service Pool Model
4. Design of Multi-Constraint Optimized Genetic Algorithm
4.1. Clustering-Based Gene-Encoding Model of Tasks and Services
4.2. Multi-Dimension Constraints in Cyber-Physical Domain
4.2.1. Constraints for Fundamental Capabilities
4.2.2. Conditions for Optimizing the Efficiency
4.3. Task Planning Oriented Genetic Algorithm
4.3.1. Multiple Population Based on Task Cluster
- Step 1: For every population , search all possible solutions under Constraint 2–Constraint 6, and form its corresponding solution set ; If there does not exist a set that is , all populations are solvable, go to next, otherwise return .
- Step 2: Iterate through the combinations of local solutions among all , and add the globally solvable solutions into the set ; If is not , then, go to next, otherwise, there is no feasible solution, return .
- Step 3: Evaluate the efficiency of all solutions in using an instantiated function as shown in Formula (4).
- Step 4: Select one optimal solution from and return.
4.3.2. Optimized GA Operators under Multiple Constraints
5. Verification Experiments and Analysis
5.1. Verification of Planning Mechanism and GA Operators
5.2. Solving Ability Analysis
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Chard, K.; Bubendorfer, K.; Caton, S.; Rana, O. Social cloud computing: A vision for socially motivated resource sharing. IEEE Trans. Serv. Comput. 2012, 5, 551–563. [Google Scholar] [CrossRef]
- Tao, F.; Cheng, Y.; Xu, L.; Zhang, L.; Li, B. CCIoT-CMfg: Cloud Computing and Internet of Things-Based Cloud Manufacturing Service System. IEEE Trans. Ind. Inform. 2014, 10, 1435–1442. [Google Scholar]
- Nadia, N.; Luiza, M.M. Swarm Intelligent Systems, 1th ed.; Springer: Berlin, Germany, 2006. [Google Scholar]
- Chamanbaz, M.; Mateo, D.; Zoss, B.; Tokić, G.; Wilhelm, E.; Bouffanais, R.; Yue, D. Swarm-Enabling Technology for Multi-Robot Systems. Front. Robot. AI 2017, 4, 12. [Google Scholar] [CrossRef]
- Teodorović, D. Swarm intelligence systems for transportation engineering: Principles and applications. Transp. Res. Part C Emerg. Technol. 2008, 16, 651–667. [Google Scholar] [CrossRef]
- Zhang, K.; Zhang, D.; de La Fortelle, A.; Miao, K.; Yao, Y. State-driven Priority Scheduling Mechanisms for Driverless Vehicles Approaching Intersections. IEEE Trans. Intell. Transp. Syst. 2015, 16, 2487–2500. [Google Scholar] [CrossRef]
- Zhang, K.; Xie, C.; Wang, Y.; Wang, M.; de La Fortelle, A.; Zhang, W.; Duan, Z. Service-Oriented Cooperation Policies for Intelligent Ground Vehicles Approaching Intersections. Appl. Sci. 2018, 8, 1647. [Google Scholar] [CrossRef]
- Yang, W.; Li, W.; Cao, J.; Wang, Q. Industrial Internet of Things: A Swarm Coordination Framework for Human-in-the-Loop. In Proceedings of the 2018 IEEE International Conference on Systems, Man, and Cybernetics (SMC), Miyazaki, Japan, 7–10 October 2018; pp. 2754–2759. [Google Scholar]
- Roberto, B.; Abderrahmen, M.; Hussein, A. Cooperative load balancing scheme for edge computing resources. In Proceedings of the 2017 Second International Conference on Fog and Mobile Edge Computing (FMEC), Valencia, Spain, 8–11 May 2017; pp. 94–100. [Google Scholar]
- Zhang, K.; Zhao, C.; Yao, Y. Synthesis Constraints Optimized Genetic Algorithm for Autonomous Task Planning and Allocating in MAS. In Proceedings of the IEEE 7th International Conference on Software Engineering Research, Management and Applications, Haikou, China, 2–4 December 2009; pp. 10–15. [Google Scholar]
- Zhen, Z.; Xing, D.; Gao, C. Cooperative search-attack mission planning for multi-UAV based on intelligent self-organized algorithm. Aerosp. Sci. Technol. 2018, 76, 402–411. [Google Scholar] [CrossRef]
- Pfeiffer, S. Robots, Industry 4.0 and Humans, or Why Assembly Work Is More than Routine Work. Societies 2016, 6, 16. [Google Scholar] [CrossRef]
- Alighanbari, M.; Howo, J. Cooperative Task Assignment of Unmanned Aerial Vehicles in Adversarial Environments. In Proceedings of the American Control Conference, Portland, OR, USA, 8–10 June 2005; pp. 4661–4666. [Google Scholar]
- How, J.P.; Bertuccelli, L.F.; Choi, H.-L.; Cho, P.L. Real-Time Multi-UAV Task Assignment in Dynamic and Uncertain Environments. In Proceedings of the AIAA Guidance, Navigation, and Control Conference (GNCC), Chicago, IL, USA, 10–13 August 2009; pp. 1–16. [Google Scholar]
- Faied, M.; Mostafa, A.; Girard, A. Vehicle Routing Problem Instances: Application to Multi-UAV Mission Planning. In Proceedings of the AIAA Guidance, Navigation, and Control Conference, Toronto, ON, Canada, 2–5 August 2010; pp. 1–11. [Google Scholar]
- Kaminer, I.; Yakimenko, O.; Dobrokhodov, V.; Pascoal, A.; Hovakimyan, N.; Cao, C.; Young, A.; Patel, V. Coordinated Path Following for Time-Critical Missions of Multiple UAVs via L1 Adaptive Output Feedback Controllers. In Proceedings of the AIAA Guidance, Navigation, and Control Conference, Hilton Head, SC, USA, 20–23 August 2007; pp. 1–34. [Google Scholar]
- Tolmid, A.; Petrou, L. Multi-objective optimization for dynamic task allocation in a multi-robot system. Eng. Appl. Artif. Intell. 2013, 26, 1458–1468. [Google Scholar] [CrossRef]
- Eric, B.; Marco, D.; Guy, T. Swarm Intelligence: From Natural to Artificial Systems, 1th ed.; Oxford University Press: New York, NY, USA, 1999. [Google Scholar]
- Lalbakhsh, P.; Fesharaki, M. Basic Concepts and Anatomy of Swarm Intelligence and Its Roles in Today and Future Network Centric Environments. In Proceedings of the International MultiConference of Engineers and Computer Scientists (IMECS), Hong Kong, China, 19–21 March 2008; pp. 1–6. [Google Scholar]
- Omelianenko, I. Artificial Swarm Intelligence and Cooperative Robotic Systems. MDPI PrePrints 2019, 1, 1–8. [Google Scholar]
- Craig, R. Flocks, herds and schools: A distributed behavioral model. In Proceedings of the 14th Annual Conference on Computer Graphics and Interactive Techniques, Anaheim, CA, USA, 27–31 July 1987; pp. 25–34. [Google Scholar]
- Vicsek, T.; Czirok, A.; Ben-Jacob, E.; Cohen, I.; Shochet, O. Novel type of phase transition in a system of self-driven particles. Phys. Rev. Lett. 1995, 75, 1226–1229. [Google Scholar] [CrossRef] [PubMed]
- Cui, Z.; Gao, X. Theory and applications of swarm intelligence. Neural Comput. Appl. 2012, 21, 205–206. [Google Scholar] [CrossRef]
- ZedadraEmail, O.; Savaglio, C.; Jouandeau, N.; Guerrieri, A.; Seridi, H.; Fortino, G. Towards a Reference Architecture for Swarm Intelligence-Based Internet of Things. In Proceedings of the International Conference on Internet and Distributed Computing Systems (IDCS), Mana Island, Fiji, 11–13 December 2017; pp. 75–86. [Google Scholar]
- Ilie, S.; Bădică, C. Multi-agent Distributed Framework for Swarm Intelligence. Procedia Comput. Sci. 2013, 18, 611–620. [Google Scholar] [CrossRef] [Green Version]
- Fortino, G.; Guerrieri, A.; Lacopo, M.; Lucia, M.; Russo, W. An Agent-Based Middleware for Cooperating Smart Objects. In Proceedings of the International Conference on Practical Applications of Agents and Multi-Agent Systems (PAAMAS), Salamanca, Spain, 22–24 May 2013; pp. 387–398. [Google Scholar]
- Salama, A. A Swarm Intelligence Based Model for Mobile Cloud Computing. Inf. Technol. Comput. Sci. 2015, 2, 28–34. [Google Scholar] [CrossRef]
- Zhang, Z.; Long, K.; Wang, J.; Dressler, F. On Swarm Intelligence Inspired Self-Organized Networking: Its Bionic Mechanisms, Designing Principles and Optimization Approaches. IEEE Commun. Surv. Tutor. 2014, 16, 513–537. [Google Scholar] [CrossRef]
- Wong, L.; Looi, C. Swarm Intelligence: New Techniques for Adaptive Systems to Provide Learning Support. Interact. Learn. Environ. 2012, 20, 19–40. [Google Scholar] [CrossRef]
- Gerkey, B.; Matarić, M. A Formal Analysis and Taxonomy of Task Allocation in Multi-Robot Systems. Robot. Res. 2004, 23, 939–954. [Google Scholar] [CrossRef] [Green Version]
- Zheng, T.; Li, J. Multi-robot Task Allocation and Scheduling based on Fish Swarm Algorithm. Proceedings of 8th World Congress on Intelligent Control and Automation (WCICA), Jinan, China, 7–9 July 2010; pp. 6681–6685. [Google Scholar]
- Kurdi, H.; Aloboud, E.; Alalwan, M.; Alhassan, S.; Alotaibi, E.; Bautista, G.; How, J. Autonomous Task Allocation for Multi-UAV Systems based on the Locust Elastic Behavior. Appl. Soft Comput. 2018, 71, 110–126. [Google Scholar] [CrossRef]
- Chen, X.; Wang, D.H. Multi-UCAV Air Combat Task Assignment under Uncertain Information Environment. Appl. Mech. Mater. 2014, 494, 1098–1101. [Google Scholar] [CrossRef]
- Hanheide, M.; Göbelbecker, M.; Horn, G.; Ponobis, A.; Sjöö, K.; Aydemir, A.; Jensfelt, P.; Gretton, C.; Dearden, R.; Janicek, M.; et al. Robot Task Planning and Explanation in Open and Uncertain Worlds. Artif. Intell. 2017, 247, 119–150. [Google Scholar] [CrossRef]
- Hu, X.; Ma, H.; Ye, Q.; Luo, H. Hierarchical Method of Task Assignment for Multiple Cooperating UAV Teams. Syst. Eng. Electron. 2015, 26, 1000–1009. [Google Scholar] [CrossRef]
- Crosby, M.; Petrick, R.; Rovida, F.; Kruger, V. Integrating Mission and Task Planning in an Industrial Robotics Framework. In Proceedings of the 27th International Conference on Automated Planning and Scheduling (ICAPS), Pittsburgh, PA, USA, 18–23 June 2017; pp. 471–479. [Google Scholar]
- Leofante, F. Optimal Multi-robot Task Planning: from Synthesis to Execution (and Back). In Proceedings of the 27th International Conference on Artificial Intelligence (IJCAI), Stockholm, Sweden, 13–19 July 2018; pp. 5771–5772. [Google Scholar]
- Choi, H.; Whitten, A.; How, J. Decentralized task allocation for heterogeneous teams with cooperation constraints. In Proceedings of the 2010 American Control Conference (ACC), Baltimore, MD, USA, 30 June–2 July 2010; pp. 3057–3062. [Google Scholar]
- Dong, J.; Moon, S.; Kim, S.; Kim, H. A Formal Analysis and Taxonomy of Task Allocation in Multi-Robot Systems. IFAC Proc. Vol. 2013, 46, 251–256. [Google Scholar]
- Girbea, A.; Suciu, C.; Nechifor, S.; Sisak, F. Design and implementation of a service-oriented architecture for the optimization of industrial applications. IEEE Trans. Ind. Inform. 2014, 10, 185–196. [Google Scholar] [CrossRef]
- Deshpande, U.; Gupta, A.; Basu, A. Coordinated Problem Solving through Resource Sharing in a Distributed Environment. IEEE Trans. Syst. Man Cybern. 2004, 34, 1299–1304. [Google Scholar] [CrossRef]
- Zhao, X.; Zhang, Y.; Su, B. Multitask Oriented GPU Resource Sharing and Virtualization in Cloud Environment. In Proceedings of the International Conference on Algorithms and Architectures for Parallel Processing (ICAPP), Zhangjiajie, China, 18–20 November 2015; pp. 509–524. [Google Scholar]
- Rezaei, B.; Sarshar, N.; Roychowdhury, V.P. Distributed Resource Sharing in Low-Latency Wireless Ad Hoc Networks. IEEE Trans. Netw. 2010, 18, 190–201. [Google Scholar] [CrossRef]
- Xu, L.; Wang, J.; Nallanathan, A.; Li, Y. Resource Allocation Based on Double Auction for Cloud Computing System. In Proceedings of the IEEE 18th International Conference on High Performance Computing and Communications, Sydney, Australia, 12–14 December 2016; pp. 1538–1543. [Google Scholar]
- Yin, B.; Shen, W.; Cheng, Y.; Cai, L.; Li, Q. Distributed Resource Sharing in Fog-assisted Big Data Streaming. In Proceedings of the IEEE International Conference on Communications (ICC), Paris, France, 21–25 May 2017; pp. 1–6. [Google Scholar]
- Liu, N.; Li, X.; Shen, W. Multi-granularity Resource Virtualization and Sharing Strategies in Cloud Manufacturing. J. Netw. Comput. Appl. 2014, 46, 72–82. [Google Scholar] [CrossRef]
- Naranjo, P.; Pooranian, Z.; Shamshirband, S.; Abawajy, J.; Conti, M. Fog over Virtualized IoT: New Opportunity for Context-Aware Networked Applications and a Case Study. Appl. Sci. 2017, 7, 1325. [Google Scholar] [CrossRef]
- Juniper Networks, Inc. Tactical Cloud-Based Mission Services in a Military Environment; White Paper 2000562-001-EN; Juniper Networks, Inc.: Sunnyvale, CA, USA, 2015. [Google Scholar]
- Zhang, K.; Li, L.; Li, Y.; Xie, B.; Fei, C.; Wang, Z. Resource-Visualization-based Cooperative Architecture and Mechanisms within the Tactical Clouds. In Proceedings of the 18th International Conference on Computer and Information Science (ICIS), Beijing, China, 17–19 June 2019; pp. 1–6. [Google Scholar]
- Lee, Y.; Huang, K.; Wu, C.; Kuo, Y.; Lai, K. A Framework for Proactive Resource Provisioning in IaaS Clouds. Appl. Sci. 2017, 7, 777. [Google Scholar] [CrossRef]
- Wang, G.; Gao, S.; Chen, Y. Research on Synthesis Evaluated Index Number of Efficiency Evaluating of Plane. J. Naval Aeronaut. Eng. Inst. 2006, 21, 487–489. [Google Scholar]
- Agarwal, M.; Srivastava, G. A Genetic Algorithm Inspired Task Scheduling in Cloud Computing. In Proceedings of the IEEE International Conference on Computing, Communication and Automation (ICCCA), Noida, India, 29–30 April 2016; pp. 364–367. [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Para | Definition | Para | Definition |
|---|---|---|---|
| Mission M | |||
| identification number. | the behavior parameters of M. | ||
| region parameters of M. | behavior time window of M. | ||
| XML-based description of M. | parsing rules of M. | ||
| Sub-Mission T | |||
| identification number. | the priority of T. | ||
| region parameters of T. | execution time window of T. | ||
| target object (s) of T. | the action of T. | ||
| direct predecessor sub-missions of T. | direct successor sub-missions of T. | ||
| constraints of T. | expected earning from the execution of T. | ||
| Atomic Task | |||
| identification number. | of the parent sub-mission of . | ||
| region parameters of . | execution time window of . | ||
| target object of . | the action of . | ||
| constraints of . | expected earning from . | ||
| event (s) to trigger . | event (s) triggered by . | ||
| Service | |||
| id of the carrier of . | type of . | ||
| value of . | Maximum velocity of . | ||
| Maximum reachable distance of . | Maximum load weight of , only for a carrier, namely a member of a swarm system. | ||
| MTBF of itself. | BTTR of itself. | ||
| capability of . | reliability of itself. | ||
| current velocity of . | current reachable distance of . | ||
| current load weight of . | current position of . | ||
| current status of . | schedulable interface of . | ||
| ID | X | Y | Service Requirements | Risk | Value | ||
|---|---|---|---|---|---|---|---|
| 1 | 2 | 5 | 200 | 400 | <1,2><2,2> | 0.1 | 1000 |
| 2 | 3 | 5 | 300 | 400 | <2,2> | 0.1 | 700 |
| 3 | 5 | 9 | 500 | 700 | <3,4> | 0.1 | 900 |
| 4 | 6 | 10 | 600 | 600 | <3,2><4,2> | 0.1 | 800 |
| 5 | 9 | 13 | 600 | 900 | <4,2> | 0.1 | 900 |
| 1 | 1 | 1 | 5 | 2 | 1 | 1 | 5 | 3 | 1 | 1 | 5 |
| 4 | 1 | 1 | 5 | 5 | 1 | 1 | 5 | 6 | 1 | 2 | 6 |
| 7 | 1 | 2 | 6 | 8 | 2 | 2 | 6 | 9 | 2 | 2 | 6 |
| 10 | 2 | 2 | 6 | 11 | 2 | 2 | 6 | 12 | 3 | 3 | 7 |
| 13 | 3 | 3 | 7 | 14 | 3 | 3 | 7 | 15 | 3 | 3 | 7 |
| 16 | 3 | 3 | 7 | 17 | 3 | 3 | 7 | 18 | 3 | 3 | 7 |
| 19 | 2 | 4 | 5 | 20 | 2 | 4 | 5 | 21 | 4 | 4 | 5 |
| 22 | 4 | 4 | 5 | 23 | 4 | 4 | 5 | 24 | 4 | 5 | 7 |
| 25 | 4 | 5 | 7 | 26 | 5 | 5 | 7 | 27 | 5 | 5 | 7 |
| 28 | 5 | 5 | 7 | 29 | 5 | 5 | 7 | 30 | 5 | 5 | 7 |
| 31 | 6 | 6 | 4 | 32 | 6 | 6 | 4 | 33 | 6 | 6 | 4 |
| 34 | 6 | 6 | 4 | 35 | 7 | 7 | 1 |
| ID | Mode | X | Y | Value | Speed | Voyage Range |
|---|---|---|---|---|---|---|
| 1 | 1 | 600 | 300 | 100 | 100 | 2000 |
| 2 | 1 | 600 | 300 | 123 | 120 | 2100 |
| 3 | 1 | 600 | 300 | 116 | 110 | 1900 |
| 4 | 1 | 200 | 800 | 95 | 105 | 1800 |
| 5 | 1 | 200 | 800 | 90 | 113 | 2200 |
| 6 | 1 | 200 | 800 | 89 | 95 | 2000 |
| 7 | 1 | 800 | 800 | 114 | 90 | 1890 |
| Group ID | Number of Tasks | Times | Probability of Solutions | Optimal Ratio |
|---|---|---|---|---|
| 1 | 4 | 100 | 100% | 90% |
| 2 | 4 | 100 | 100% | 95% |
| 3 | 5 | 100 | 100% | 87% |
| 4 | 5 | 100 | 100% | 97% |
| 5 | 7 | 100 | 100% | 97% |
| 6 | 7 | 100 | 100% | 95% |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, K.; Fei, C.; Xie, B.; Wang, Y.; Gong, Z.; Xie, C.; Nguyen, T.M.T.; Yao, Y.; Miao, K. Multi-Constraint Optimized Planning of Tasks on Virtualized-Service Pool for Mission-Oriented Swarm Intelligent Systems. Appl. Sci. 2019, 9, 3010. https://doi.org/10.3390/app9153010
Zhang K, Fei C, Xie B, Wang Y, Gong Z, Xie C, Nguyen TMT, Yao Y, Miao K. Multi-Constraint Optimized Planning of Tasks on Virtualized-Service Pool for Mission-Oriented Swarm Intelligent Systems. Applied Sciences. 2019; 9(15):3010. https://doi.org/10.3390/app9153010
Chicago/Turabian StyleZhang, Kailong, Chao Fei, Baorong Xie, Yujia Wang, Zheng Gong, Chenyu Xie, Thi Mai Trang Nguyen, Yuan Yao, and Kejian Miao. 2019. "Multi-Constraint Optimized Planning of Tasks on Virtualized-Service Pool for Mission-Oriented Swarm Intelligent Systems" Applied Sciences 9, no. 15: 3010. https://doi.org/10.3390/app9153010