Development of New Soft Wearable Balance Exercise Device Using Pneumatic Gel Muscles


Abstract
:
1. Introduction
2. Materials and Methods
2.1. Pneumatic Gel Muscle
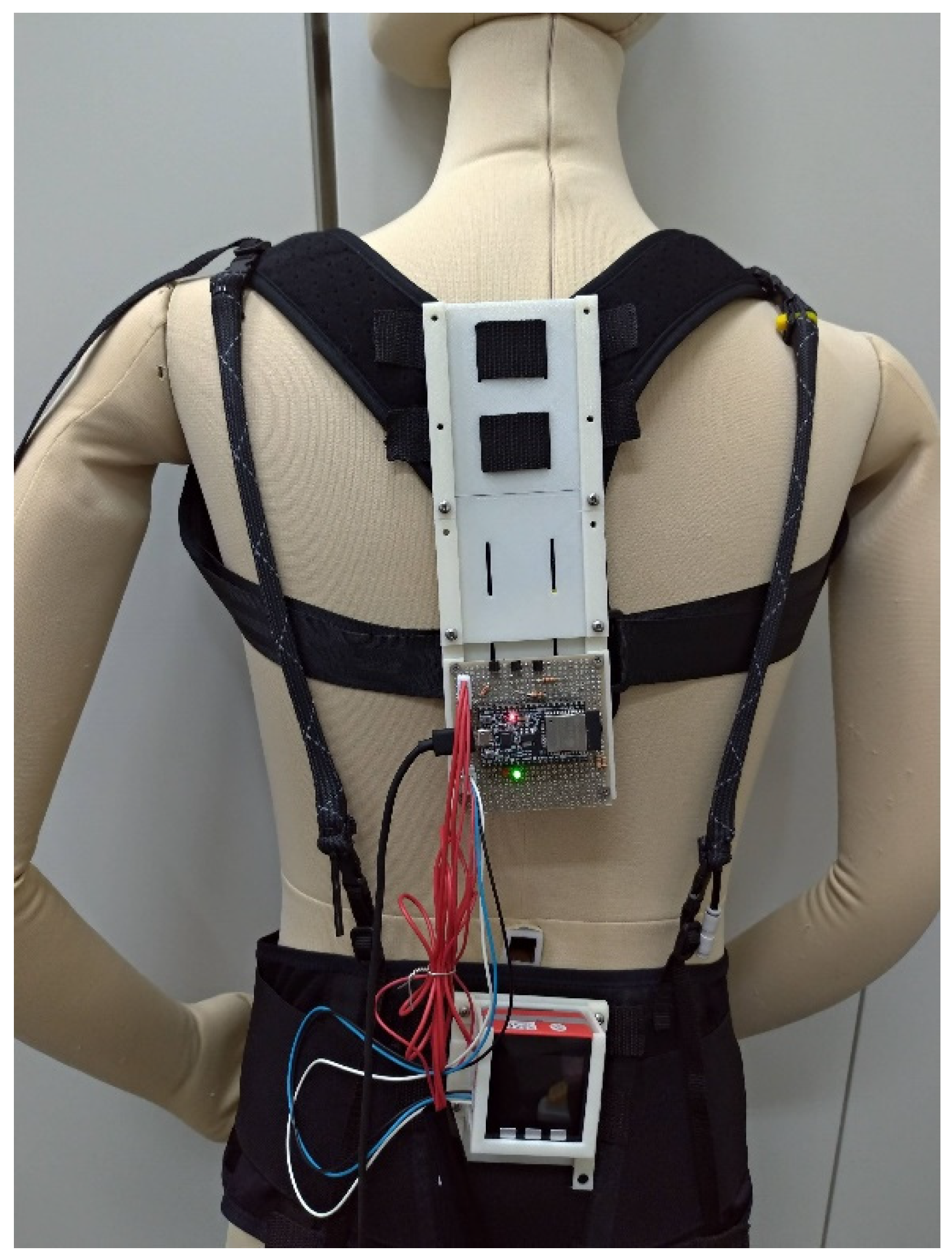
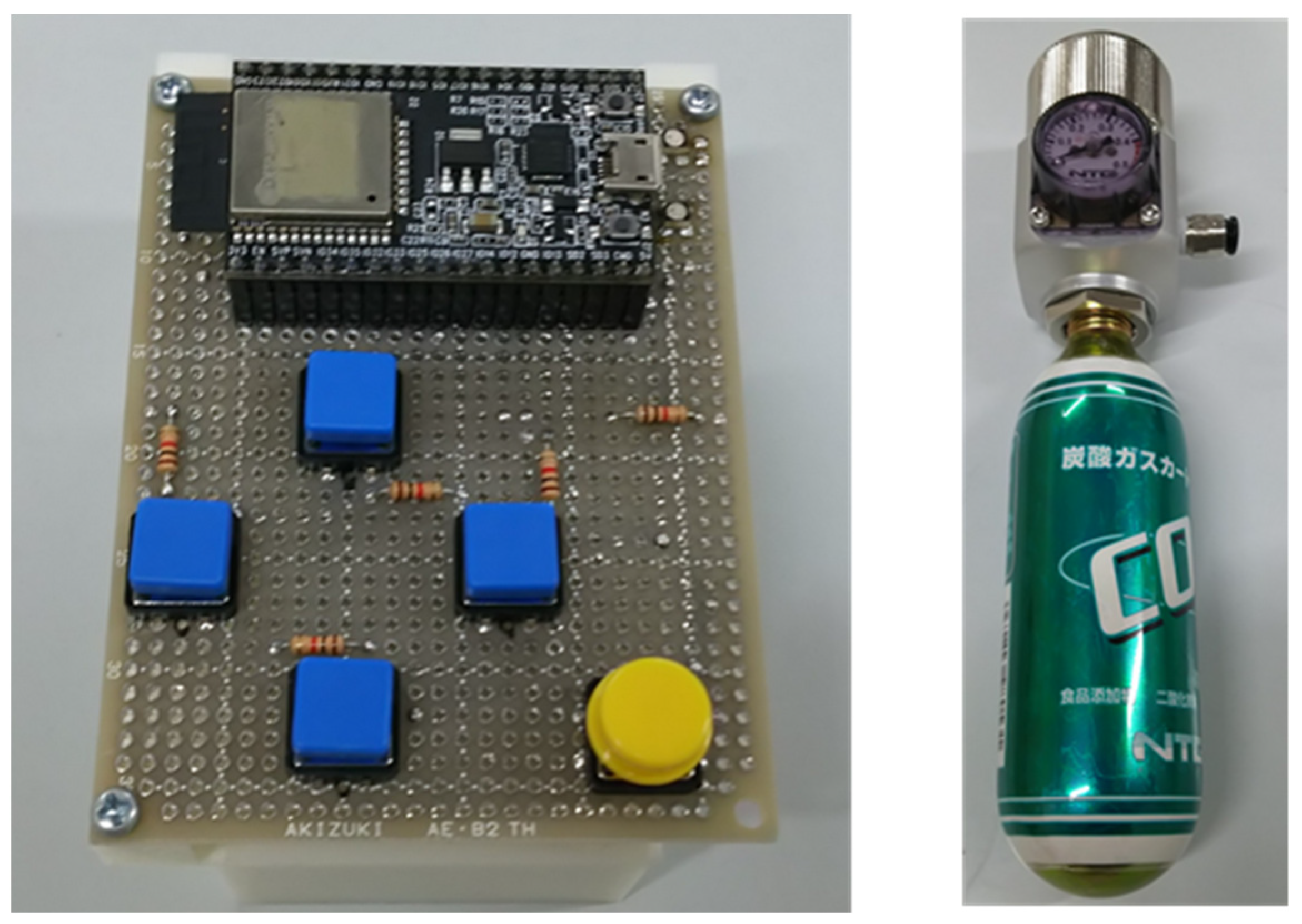
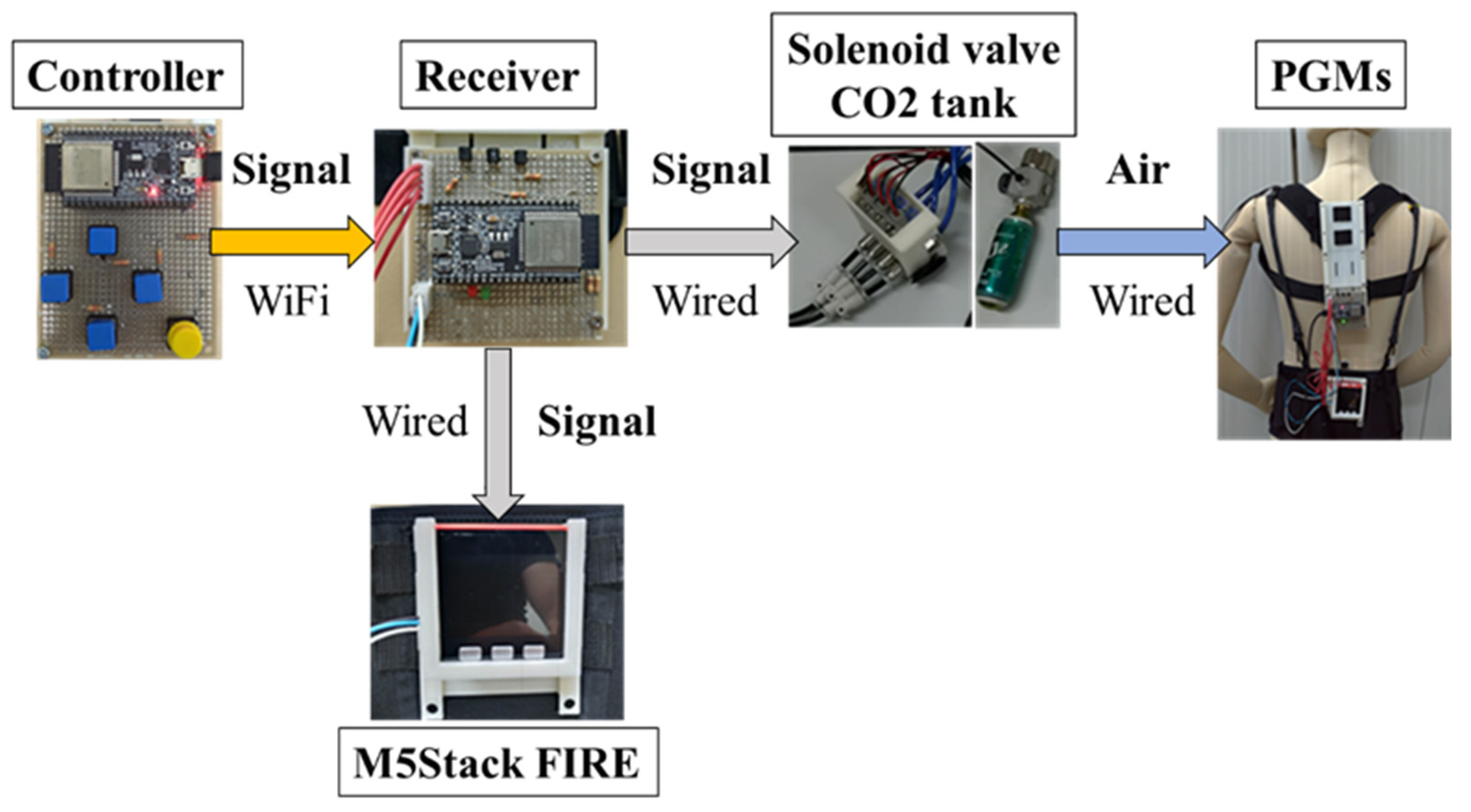
2.2. Construction of Wearable Balance Exercise Device
2.3. Participants and Measurement Protocol
2.4. Data Analysis
3. Results
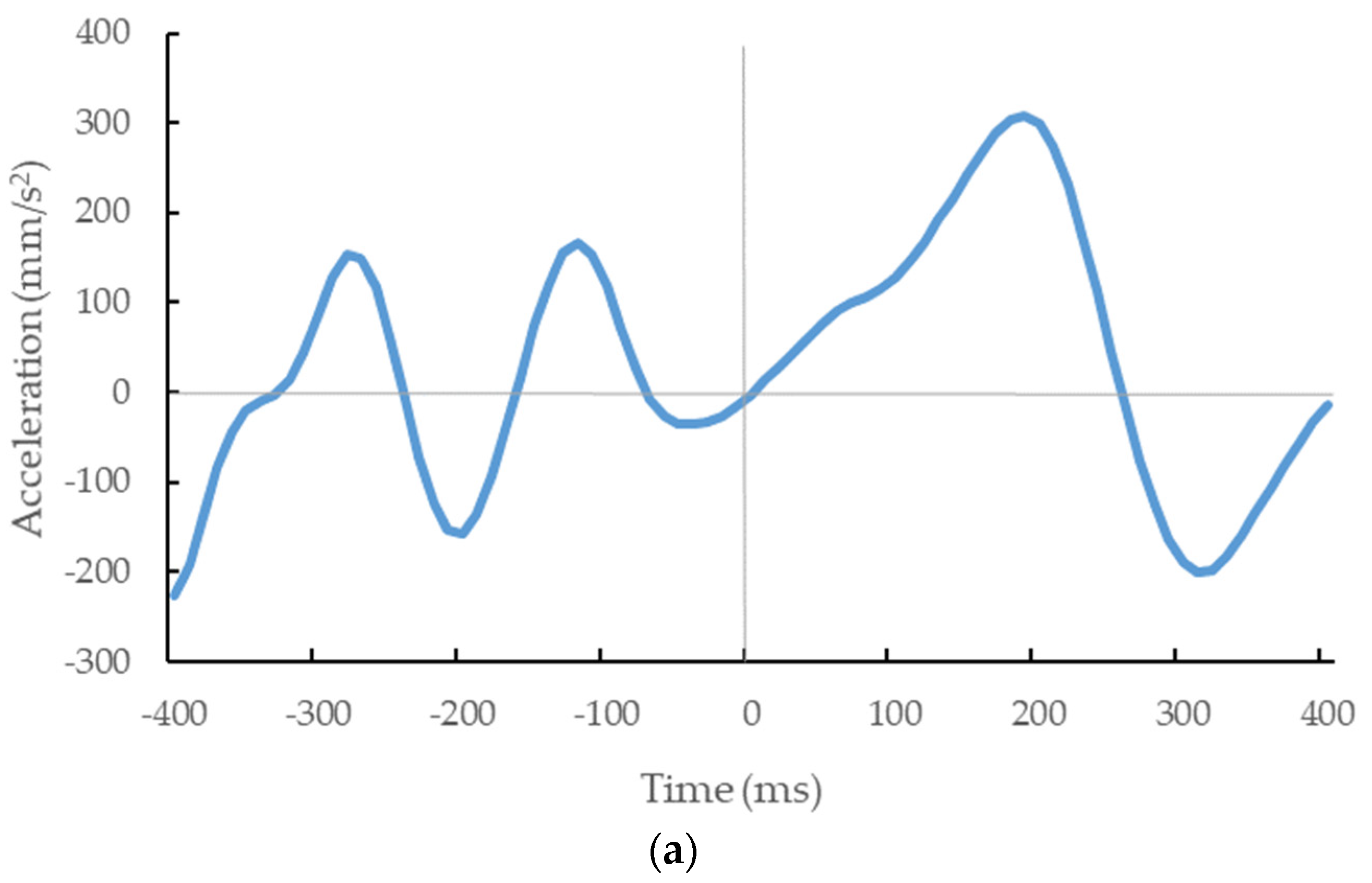
3.1. The Effects of the Balance Exercise Device Using Perturbations
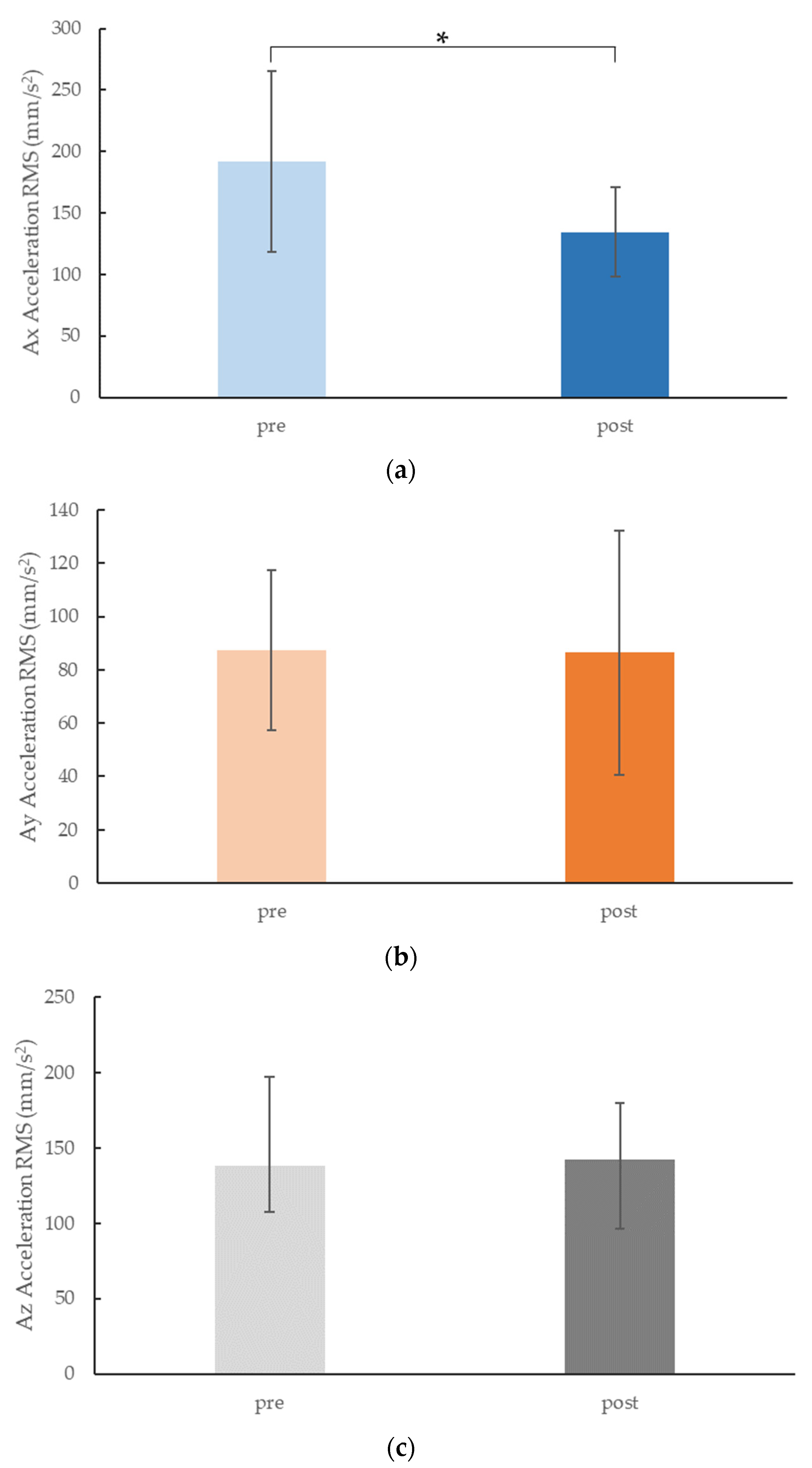
3.2. RMS
4. Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Judge, J.O.; Davis, R.B.; Ounpuu, S. Step length reductions in advanced age: The role of ankle and hip kinetics. J. Gerontol. A. Biol. Sci. Med. Sci. 1996, 51, M303–M312. [Google Scholar] [CrossRef] [PubMed]
- Roubenoff, R.; Hughes, V.A. Sarcopenia: Current concepts. J. Gerontol. Ser. 2000, 55, 716–724. [Google Scholar] [CrossRef] [PubMed]
- Amiridis, I.G.; Hatzitaki, V.; Arabatzi, F. Age-induced modifications of static postural control in humans. Neurosci. Lett. 2003, 350, 137–140. [Google Scholar] [CrossRef]
- Berg, K.O.; Maki, B.E.; Williams, J.I.; Holliday, P.J.; Wood-Dauphinee, S.L. Clinical and laboratory measures of postural balance in an elderly population. Arch. Phys. Med. Rehabil. 1992, 73, 1073–1080. [Google Scholar] [PubMed]
- Tinetti, M.E.; Kumar, C. The patient who falls: “It’s always a trade-off”. JAMA 2010, 303, 258–266. [Google Scholar] [CrossRef] [PubMed]
- Madureira, M.M.; Takayama, L.; Gallinaro, A.L.; Caparbo, V.F.; Costa, R.A.; Pereira, R.M. Balance training program is highly effective in improving functional status and reducing the risk of falls in elderly women with osteoporosis: A randomized controlled trial. Osteoporos. Int. 2007, 18, 419–425. [Google Scholar] [CrossRef]
- Lesinski, M.; Hortobágyi, T.; Muehlbauer, T.; Gollhofer, A.; Granacher, U. Effects of Balance Training on Balance Performance in Healthy Older Adults: A Systematic Review and Meta-analysis. Sports Med. 2015, 45, 1721–1738. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Horak, F.B. Clinical assessment of balance disorders. Gait Posture 1997, 6, 76–84. [Google Scholar] [CrossRef]
- Sibley, K.M.; Beauchamp, M.K.; Van Ooteghem, K.; Straus, S.E.; Jaglal, S.B. Using the systems framework for postural control to analyze the components of balance evaluated in standardized balance measures: A scoping review. Arch. Phys. Med. Rehabil. 2015, 96, 122–132. [Google Scholar] [CrossRef]
- Sherrington, C.; Whitney, J.C.; Lord, S.R.; Herbert, R.D.; Cumming, R.G.; Close, J.C.T. Effective exercise for the prevention of falls: A systematic review and meta-analysis. J. Am. Geriatr. Soc. 2008, 56, 2234–2243. [Google Scholar] [CrossRef]
- Studenski, S.; Duncan, P.W.; Chandler, J. Postural responses and effector factors in persons with unexplained falls: Results and methodologic issues. J. Am. Geriatr. Soc. 1991, 39, 229–234. [Google Scholar] [CrossRef]
- Lin, S.I.; Woollacott, M.H.; Jensen, J.L. Postural response in older adults with different levels of functional balance capacity. Aging Clin. Exp. Res. 2004, 16, 369–374. [Google Scholar] [CrossRef]
- Pai, Y.-C.; Wening, J.D.; Runtz, E.F.; Iqbal, K.; Pavol, M.J. Role of feedforward control of movement stability in reducing slip-related balance loss and falls among older adults. J. Neurophysiol. 2006, 90, 755–762. [Google Scholar] [CrossRef]
- Zha, F.; Sheng, W.; Guo, W.; Qiu, S.; Wang, X.; Chen, F. The exoskeleton balance assistance control strategy based on single step balance assessment. Appl. Sci. 2019, 9, 884. [Google Scholar] [CrossRef]
- Ozaki, K.; Kagaya, H.; Hirano, S.; Kondo, I.; Tanabe, S.; Itoh, N.; Saitoh, E.; Fuwa, T.; Murakami, R. Preliminary trial of postural strategy training using a personal transport assistance robot for patients with central nervous system disorder. Arch. Phys. Med. Rehabil. 2013, 94, 59–66. [Google Scholar] [CrossRef]
- Mansfield, A.; Wong, J.S.; Bryce, J.; Knorr, S.; Patterson, K.K. Does perturbation-based balance training prevent falls? Systematic review and meta-analysis of preliminary randomized controlled trials. Phys. Ther. 2015, 95, 700–709. [Google Scholar] [CrossRef]
- Jin, S.; Xiong, X.; Zhao, D.; Jin, C.; Yamamoto, M. Long-Term effects of a soft robotic suit on gait characteristics in healthy elderly persons. Appl. Sci. 2019, 9, 1957. [Google Scholar] [CrossRef]
- Thakur, C.; Ogawa, K.; Tsuji, T.; Kurita, Y. Soft wearable augmented walking suit with pneumatic gel muscles and stance phase detection system to assist gait. IEEE Autom. Lett. 2018, 3, 4257–4264. [Google Scholar] [CrossRef]
- Das, S.; Lowell, C.; Kishishita, Y.; Ogawa, K.; Tsuji, T.; Kurita, Y. Forcehand glove: A wearable force-feedback glove with pneumatic artificial muscles (PAMs). IEEE Autom. Lett. 2018, 3, 2416–2423. [Google Scholar] [CrossRef]
- Ogawa, K.; Thakur, C.; Ikeda, T.; Tsuji, T.; Kurita, Y. Development of a pneumatic artificial muscle driven by low pressure and its application to the unplugged powered suit. Adv. Robot. 2017, 31, 1135–1143. [Google Scholar] [CrossRef]
- Mancini, M.; Zampieri, C.; Carlson-Kuhta, P.; Chiari, L.; Horak, F.B. Anticipatory postural adjustments prior to step initiation are hypometric in untreated parkinson’s disease: An accelerometer-based approach. Eur. J. Neurol. 2009, 16, 1028–1034. [Google Scholar] [CrossRef]
- Mancini, M.; Salarian, A.; Carlson-kuhta, P.; Zampieri, C.; King, L.; Chiari, L.; Horak, F.B. ISway: A sensitive, valid and reliable measure of postural control. J. Neuroeng. Rehabil. 2012, 9, 1. [Google Scholar] [CrossRef]
- Hughey, L.K.; Fung, J. Postural responses triggered by multidirectional leg lifts and surface tilts. Exp. Brain Res. 2005, 165, 152–166. [Google Scholar] [CrossRef]
- Thakur, C.; Ogawa, K.; Kurita, Y. Active passive nature of assistive wearable gait augment suit for enhanced mobility. J. Robot. Mechatron. 2018, 30, 717–728. [Google Scholar] [CrossRef]
- Macrae, P.G.; Lacourse, M.; Moldavon, R. Physical performance measures that predict faller status in community-dwelling older adults. J. Orthop. Sports Phys. Ther. 1992, 16, 123–128. [Google Scholar] [CrossRef]
- Michikawa, T.; Nishiwaki, Y.; Takebayashi, T.; Toyama, Y. One-leg standing test for elderly populations. J. Orthop. Sci. 2009, 14, 675–685. [Google Scholar] [CrossRef]
- Dingenen, B.; Staes, F.F.; Janssens, L. A new method to analyze postural stability during a transition task from double-leg stance to single-leg stance. J. Biomech. 2013, 46, 2213–2219. [Google Scholar] [CrossRef]
- Merz, O.; Wolf, U.; Robert, M.; Gesing, V.; Rominger, M. Validity of palpation techniques for the identification of the spinous process L5. Man. Ther. 2013, 18, 333–338. [Google Scholar] [CrossRef]
- Cavanagh, P.R.; Komi, P.V. Electromechanical delay in human skeletal muscle under concentric and eccentric contractions. Eur. J. Appl. Physiol. Occup. Physiol. 1979, 42, 159–163. [Google Scholar] [CrossRef]
- Santos, M.J.; Kanekar, N.; Aruin, A.S. The role of anticipatory postural adjustments in compensatory control of posture: 2. Biomechanical analysis. J. Electromyogr. Kinesiol. 2010, 20, 398–405. [Google Scholar] [CrossRef] [Green Version]
- Henry, S.M.; Fung, J.; Horak, F.B. Effect of stance width on multidirectional postural responses. J. Neurophysiol. 2017, 85, 559–570. [Google Scholar] [CrossRef]
- Santos, M.J.; Kanekar, N.; Aruin, A.S. The role of anticipatory postural adjustments in compensatory control of posture: 1. Electromyographic analysis. J. Electromyogr. Kinesiol. 2010, 20, 388–397. [Google Scholar] [CrossRef]
- Vint, P.F.; McLean, S.P.; Harron, G.M. Electromechanical delay in isometric actions initiated from nonresting levels. Med. Sci. Sports Exerc. 2001, 33, 978–983. [Google Scholar] [CrossRef]
- Da Silva, R.A.; Bilodeau, M.; Parreira, R.B.; Teixeira, D.C.; Amorim, C.F. Age-related differences in time-limit performance and force platform-based balance measures during one-leg stance. J. Electromyogr. Kinesiol. 2013, 23, 634–639. [Google Scholar] [CrossRef]
- Verhagen, E.; Bobbert, M.; Inklaar, M.; van Kalken, M.; Van der Beek, A.; Bouter, L.; Van Mechelen, W. The effect of a balance training programme on centre of pressure excursion in one-leg stance. Clin. Biomech. 2005, 20, 1094–1100. [Google Scholar] [CrossRef] [Green Version]
- Moe-Nilssen, R.; Helbostad, J.L. Trunk accelerometry as a measure of balance control during quiet standing. Gait Posture 2002, 16, 60–68. [Google Scholar] [CrossRef]
- Turcot, K.; Allet, L.; Golay, A.; Hoffmeyer, P.; Armand, S. Investigation of standing balance in diabetic patients with and without peripheral neuropathy using accelerometers. Clin. Biomech. 2009, 24, 716–721. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| b-A | p-A | r-A | |
|---|---|---|---|
| Ax (mm/s2) | 167.0 ± 122.4 | 237.3 ± 92.2 ** †† | −65 ± 120.0 * |
| Ay (mm/s2) | 164.5 ± 76.9 | −307.6 ± 130.4 ** †† | 137.3 ± 52.8 |
| Az (mm/s2) | 143.7 ± 56.1 | 187.1 ± 247.8 | 75.5 ± 255.8 |
| Tp-A | Tr-A | |
|---|---|---|
| Ax (ms) | 147.1 ± 77.4 | 287.1 ± 84.6 ** |
| Ay (ms) | 137.1 ± 63.7 | 257.1 ± 69.9 ** |
| Az (ms) | 111.4 ± 70.6 | 251.4 ± 56.4 ** |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yamamoto, M.; Kishishita, Y.; Shimatani, K.; Kurita, Y. Development of New Soft Wearable Balance Exercise Device Using Pneumatic Gel Muscles. Appl. Sci. 2019, 9, 3108. https://doi.org/10.3390/app9153108
Yamamoto M, Kishishita Y, Shimatani K, Kurita Y. Development of New Soft Wearable Balance Exercise Device Using Pneumatic Gel Muscles. Applied Sciences. 2019; 9(15):3108. https://doi.org/10.3390/app9153108
Chicago/Turabian StyleYamamoto, Masataka, Yusuke Kishishita, Koji Shimatani, and Yuichi Kurita. 2019. "Development of New Soft Wearable Balance Exercise Device Using Pneumatic Gel Muscles" Applied Sciences 9, no. 15: 3108. https://doi.org/10.3390/app9153108
APA StyleYamamoto, M., Kishishita, Y., Shimatani, K., & Kurita, Y. (2019). Development of New Soft Wearable Balance Exercise Device Using Pneumatic Gel Muscles. Applied Sciences, 9(15), 3108. https://doi.org/10.3390/app9153108