Study on the Dynamic Characteristics of a Hydraulic Continuous Variable Compression Ratio System


Abstract
:1. Introduction
2. Structure and Working Principle of the VCR System
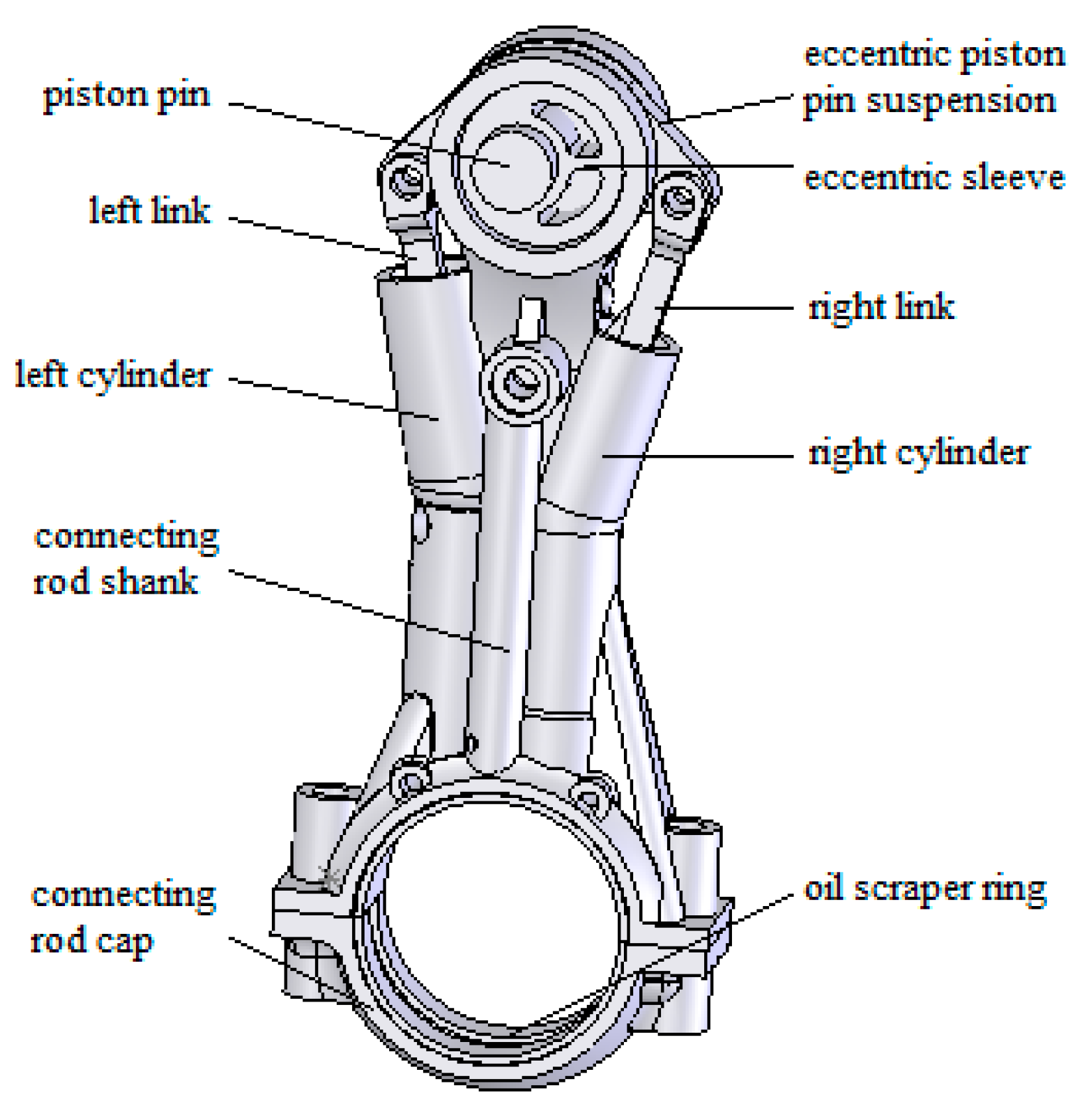
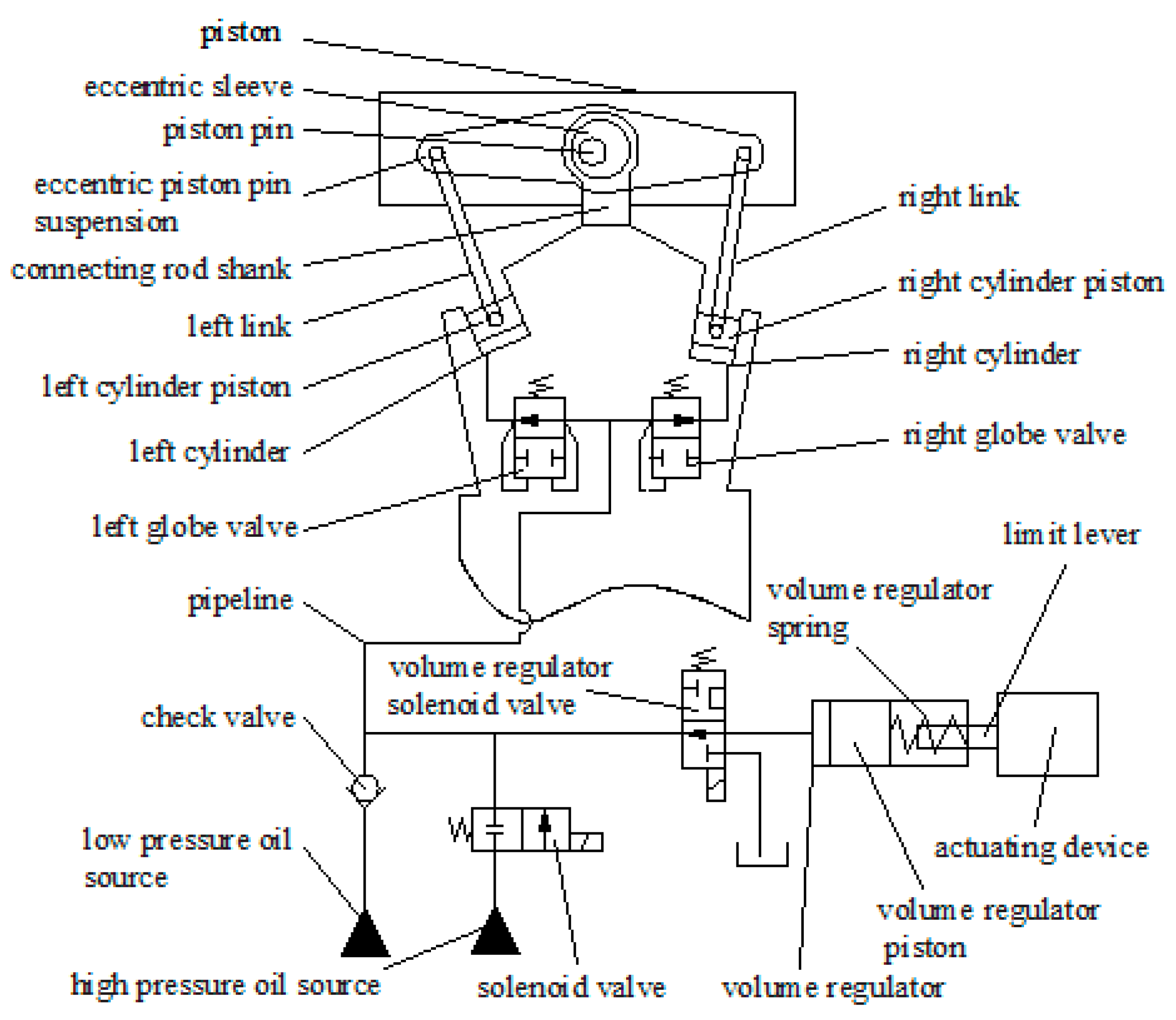
2.1. Structure of the VCR System
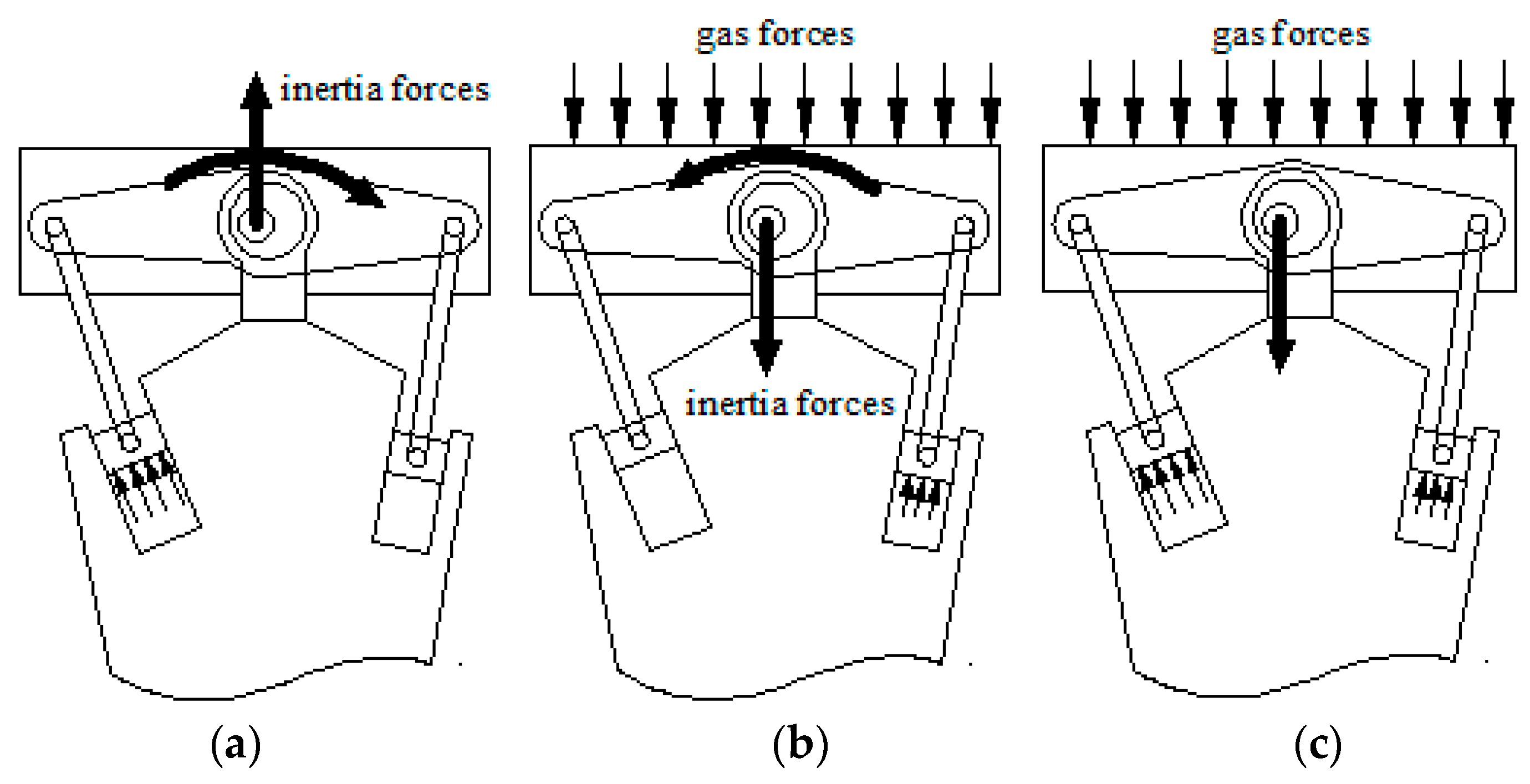
2.2. Working Principle of the VCR System
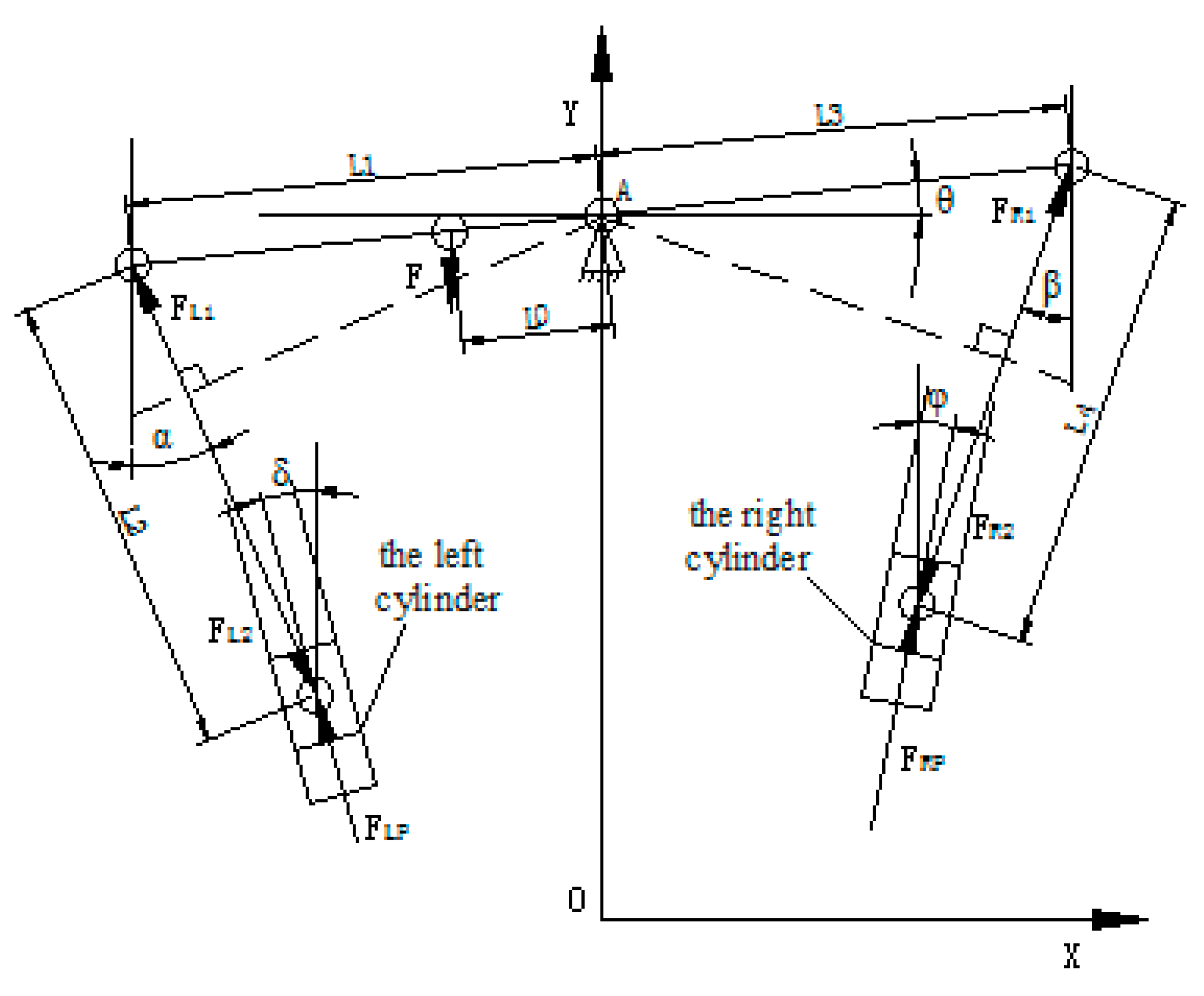
3. Mathematical Modeling
4. Simulation Model and Simulation Results
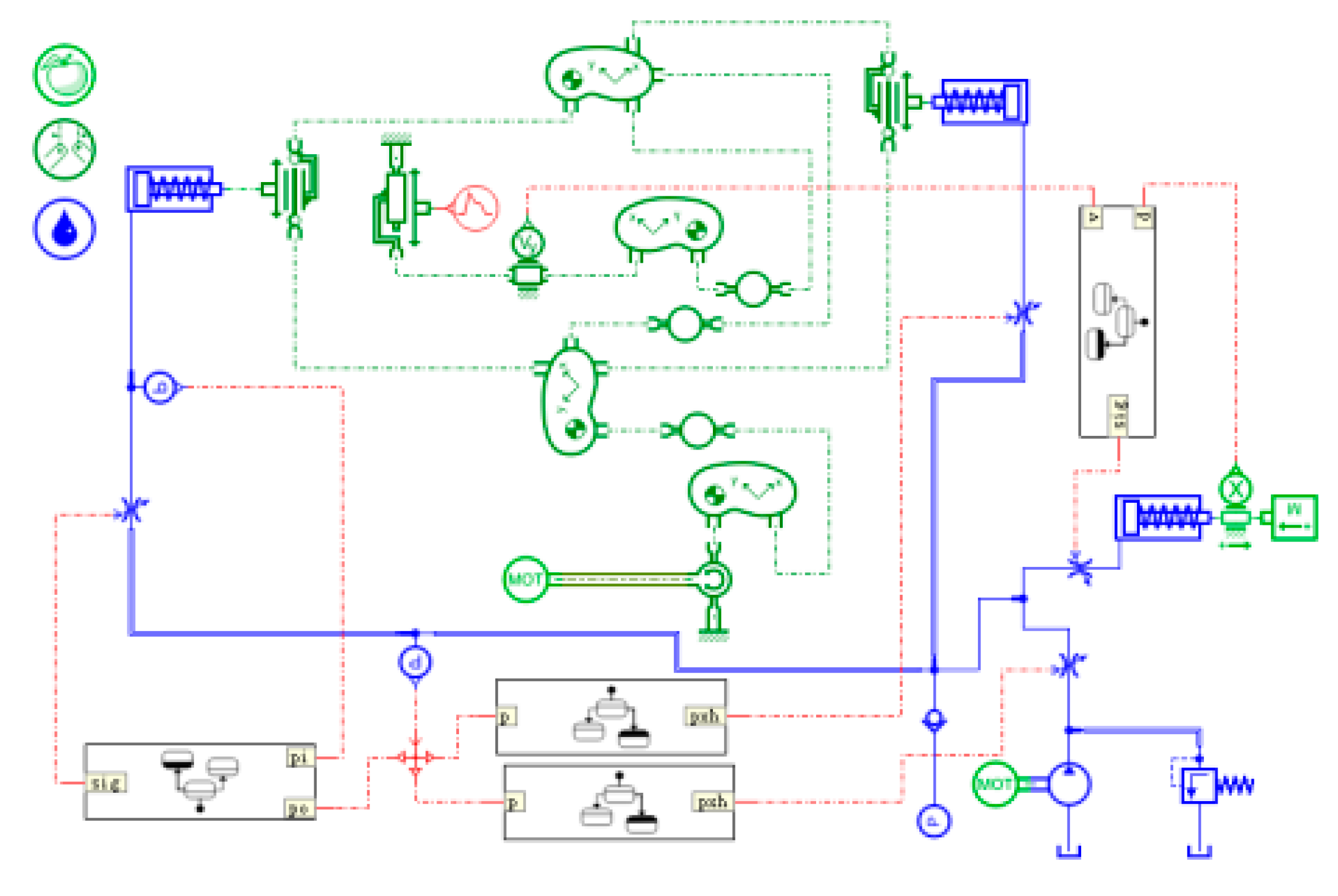
4.1. Simulation Model
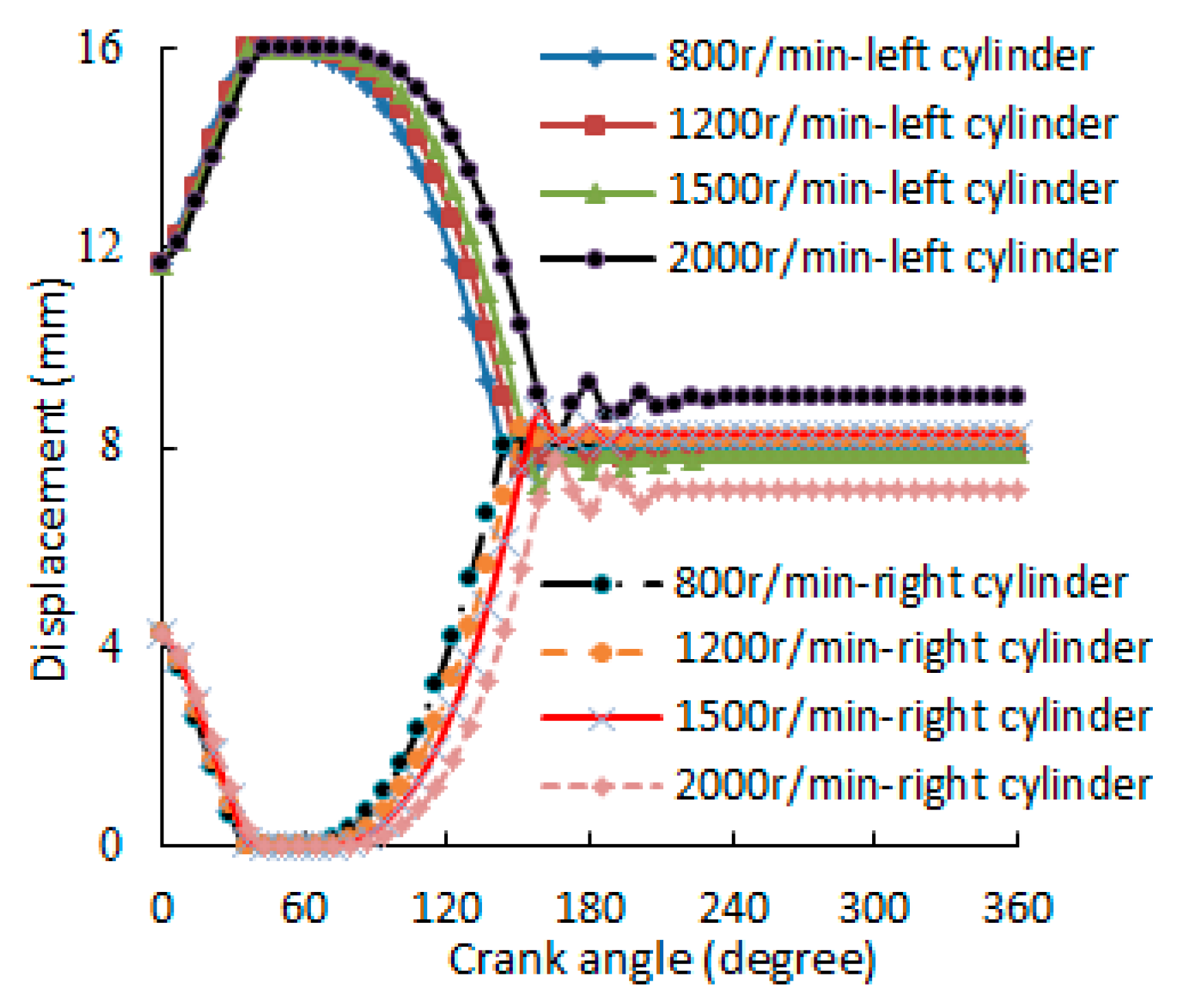
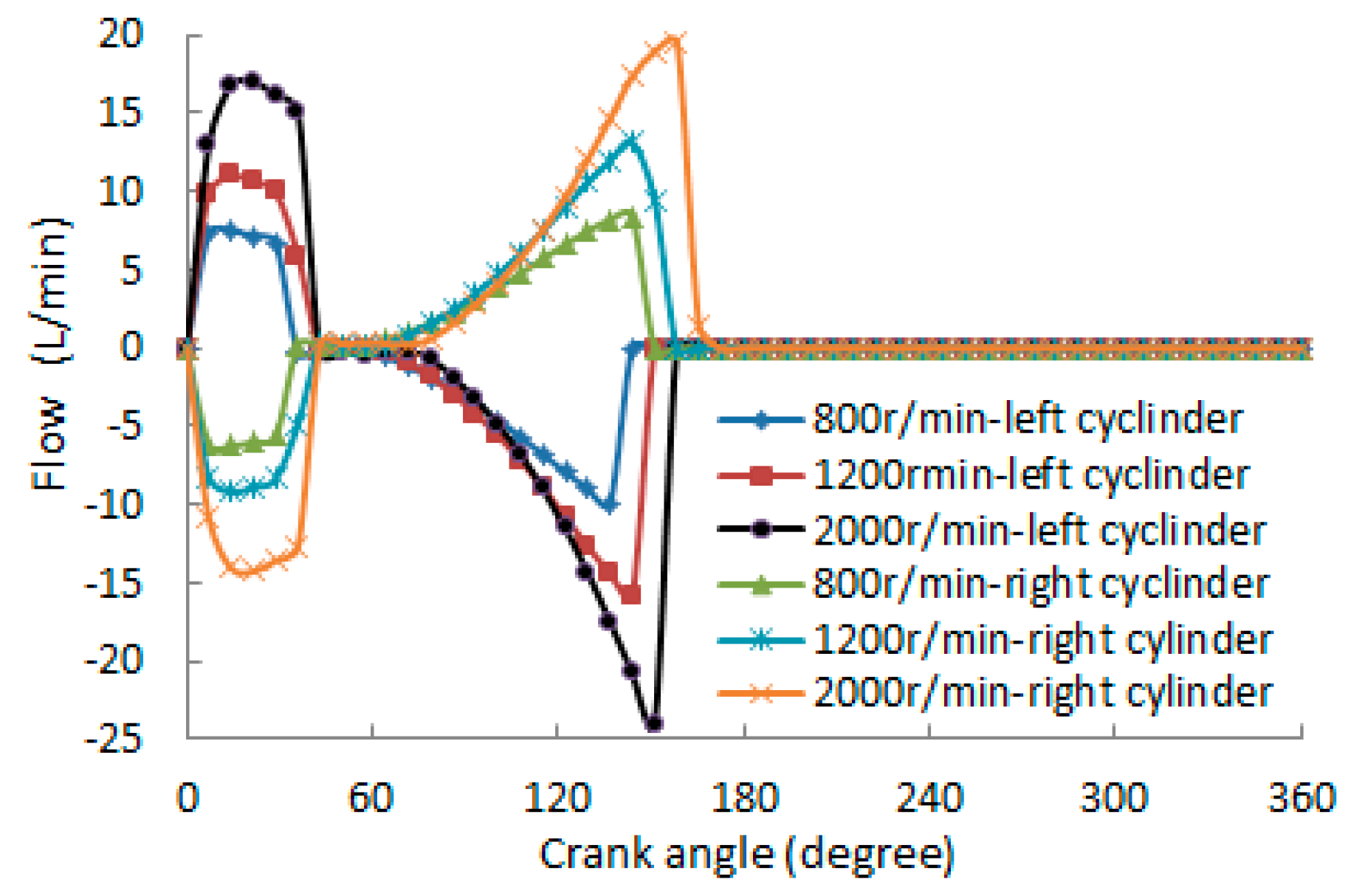
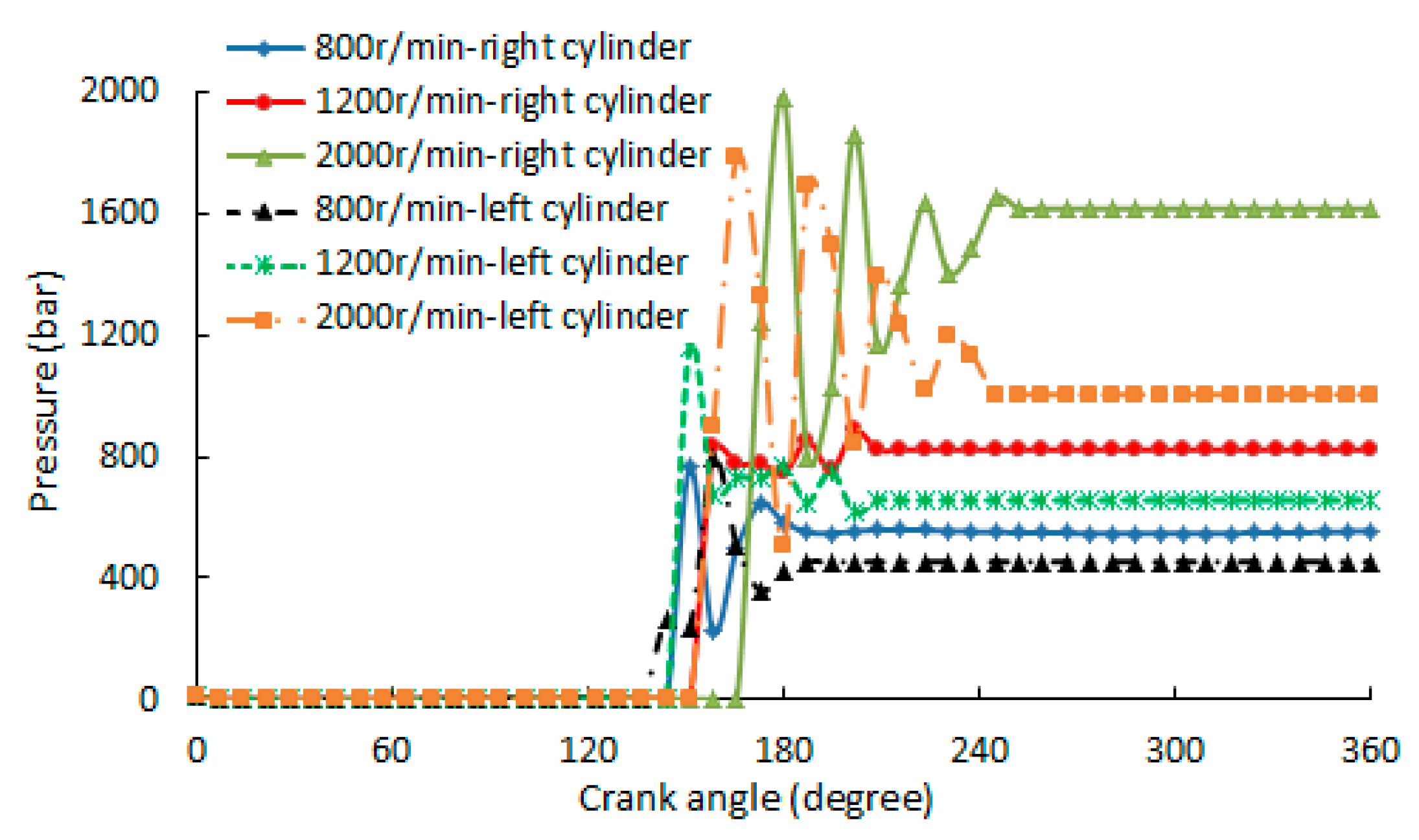
4.2. Simulation Results
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Dhananjay, K.S.; Avinash, K.A. Combustion characteristics of a variable compression ratio laser-plasma ignited compressed natural gas engine. Fuel 2018, 214, 322–329. [Google Scholar]
- Feng, D.Q.; Wei, H.Q.; Pan, M.Z. Comparative study on combined effects of cooled EGR with intake boosting and variable compression ratios on combustion and emissions improvement in a SI engine. Appl. Therm. Eng. 2018, 131, 192–200. [Google Scholar] [CrossRef]
- Yang, S.; Lin, J.S. A theoretical study of the mechanism with variable compression ratio and expansion ratio. Mech. Based Des. Struct. Mach. 2018, 46, 267–284. [Google Scholar] [CrossRef]
- Hoeltgebaum, T.; Simoni, R.; Martins, D. Reconfigurability of engines: A kinematic approach to variable compression ratio engines. Mech. Mach. Theory 2016, 96, 308–322. [Google Scholar] [CrossRef]
- Westerloh, M.; Twenhövel, S.; Koehler, J.; Schumacher, W. Worldwide Electrical Energy Consumption of Various HVAC Systems in BEVs and Their Thermal Management and Assessment. SAE Tech. Pap. Ser. 2018. [Google Scholar] [CrossRef]
- Caio, H.R.; Janito, V.F. Kinematics of a variable stroke and compression ratio mechanism of an internal combustion engine. J. Braz. Soc. Mech. Sci. Eng. 2018, 40, 476–489. [Google Scholar]
- Jiang, S.; Smith, M.H. Geometric Parameter Design of a Multiple-Link Mechanism for Advantageous Compression Ratio and Displacement Characteristics. SAE Tech. Pap. Ser. 2014, 1. [Google Scholar] [CrossRef]
- Karsten, W.; Frank, G.; Jakob, A.; Mario, M.; Vitor, C.; Thompson, L. Experimental investigation of a variable compression ratio system applied to a gasoline passenger car engine. Energy Convers. Manag. 2019, 183, 753–763. [Google Scholar]
- Asthana, S.; Bansal, S.; Jaggi, S.; Kumar, N. A Comparative Study of Recent Advancements in the Field of Variable Compression Ratio Engine Technology. SAE Tech. Pap. Ser. 2016, 1. [Google Scholar] [CrossRef]
- Mane, P.; Pendovski, D.; Sonnen, S.; Uhlmann, A.; Henaux, D.; Blum, R.; Sharma, V. Coupled Dynamic Simulation of Two Stage Variable Compression Ratio (VCR) Connecting Rod Using Virtual Dynamics. SAE Int. J. Adv. Curr. Prac. Mobil. 2019, 1. [Google Scholar] [CrossRef]
- Shelby, M.H.; Leone, T.G.; Byrd, K.D.; Wong, F.K. Fuel Economy Potential of Variable Compression Ratio for Light Duty Vehicles. SAE Int. J. Engines 2017, 10, 817–831. [Google Scholar] [CrossRef]
- Kojima, S.; Kiga, S.; Moteki, K.; Takahashi, E.; Matsuoka, K. Development of a New 2L Gasoline VC-Turbo Engine with the World’s First Variable Compression Ratio Technology. SAE Tech. Pap. Ser. 2018. [Google Scholar] [CrossRef]
- Romero, C.A.; Castañeda, E.D.J.H. Developing Small Variable Compression Ratio Engines for Teaching Purposes in an Undergraduate Program. SAE Tech. Pap. Ser. 2019. [Google Scholar] [CrossRef]
- Shaik, A.; Moorthi, N.S.V.; Rudramoorthy, R. Variable compression ratio engine: A future power plant for automobiles—An overview. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2007, 221, 1159–1168. [Google Scholar] [CrossRef]
- Wittek, K.; Geiger, F.; Andert, J.; Martins, M.; Oliveira, M. An Overview of VCR Technology and Its Effects on a Turbocharged DI Engine Fueled with Ethanol and Gasoline. SAE Tech. Pap. Ser. 2017. [Google Scholar] [CrossRef]
- Shi, H.; Al Mudraa, S.; Johansson, B. Variable Compression Ratio (VCR) Piston—Design Study. SAE Tech. Pap. Ser. 2019. [Google Scholar] [CrossRef]
- Hiyoshi, R.; Aoyama, S.; Takemura, S.; Ushijima, K.; Sugiyama, T. A Study of a Multiple-link Variable Compression Ratio System for Improving Engine Performance. SAE Tech. Pap. Ser. 2006, 1. [Google Scholar] [CrossRef]
- Kadota, M.; Ishikawa, S.; Yamamoto, K.; Kato, M.; Kawajiri, S. Advanced Control System of Variable Compression Ratio (VCR) Engine with Dual Piston Mechanism. SAE Int. J. Engines 2009, 2, 1009–1018. [Google Scholar] [CrossRef]
- Kleeberg, H.; Tomazic, D.; Dohmen, J.; Wittek, K.; Balazs, A. Increasing Efficiency in Gasoline Powertrains with a Two-Stage Variable Compression Ratio (VCR) System. SAE Tech. Pap. Ser. 2013, 1. [Google Scholar] [CrossRef]
- Wolfgang, S.; Sorger, H.; Loesch, S.; Unzeitig, W.; Huettner, T.; Fuerhapter, A. The 2-Step VCR Conrod System—Modular System for High Efficiency and Reduced CO2. SAE Tech. Pap. Ser. 2017, 1. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Item | Parameter |
|---|---|
| Diameter of left cylinder piston (mm) | 15.4 |
| Diameter of right cylinder piston (mm) | 13.8 |
| Diameter of volume regulator piston (mm) | 10 |
| Diameter of volume regulator rod (mm) | 5 |
| Diameter of pipeline (mm) | 6 |
| Stroke of left cylinder (mm) | 16 |
| Stroke of right cylinder (mm) | 16 |
| Initial displacement of left cylinder piston (mm) | 11.7 |
| Initial displacement of right cylinder piston (mm) | 4.3 |
| Initial displacement of volume regulator piston (mm) | 0 |
| Initial pressure of right cylinder (bar) | 10 |
| Initial pressure of left cylinder (bar) | 10 |
| Initial pressure of volume regulator (bar) | 0 |
| Initial pressure of pipeline (bar) | 2.5 |
| Density of hydraulic medium (kg/mm3) | 850 × 10−9 |
| Effective flow area of check valve (mm2) | 10 |
| Maximum flow coefficient | 0.7 |
| Pre-tightening force of volume regulator spring (N) | 35 |
| Stiffness of volume regulator spring (N/mm) | 1000 |
| Hydraulic oil elastic modulus (bar/mm2) | 7 |
| Mass of crank axle (kg) | 2 |
| Mass of engine connecting rod (kg) | 0.4 |
| Mass of eccentric piston pin suspension (kg) | 0.07 |
| Length of left arm of eccentric piston pin suspension (mm) | 26 |
| Length of right arm of eccentric piston pin suspension (mm) | 26 |
| Length of pipeline (m) | 0.3 |
| Eccentric size (mm) | 4 |
| Pressure of low pressure oil source (bar) | 2.5 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, J.; Wang, B.; Liu, D.; Yang, K. Study on the Dynamic Characteristics of a Hydraulic Continuous Variable Compression Ratio System. Appl. Sci. 2019, 9, 4484. https://doi.org/10.3390/app9214484
Chen J, Wang B, Liu D, Yang K. Study on the Dynamic Characteristics of a Hydraulic Continuous Variable Compression Ratio System. Applied Sciences. 2019; 9(21):4484. https://doi.org/10.3390/app9214484
Chicago/Turabian StyleChen, Jiadui, Bo Wang, Dan Liu, and Kai Yang. 2019. "Study on the Dynamic Characteristics of a Hydraulic Continuous Variable Compression Ratio System" Applied Sciences 9, no. 21: 4484. https://doi.org/10.3390/app9214484