The Use of Underwater Gliders as Acoustic Sensing Platforms


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. The Petrel II Glider and the Sea Trial
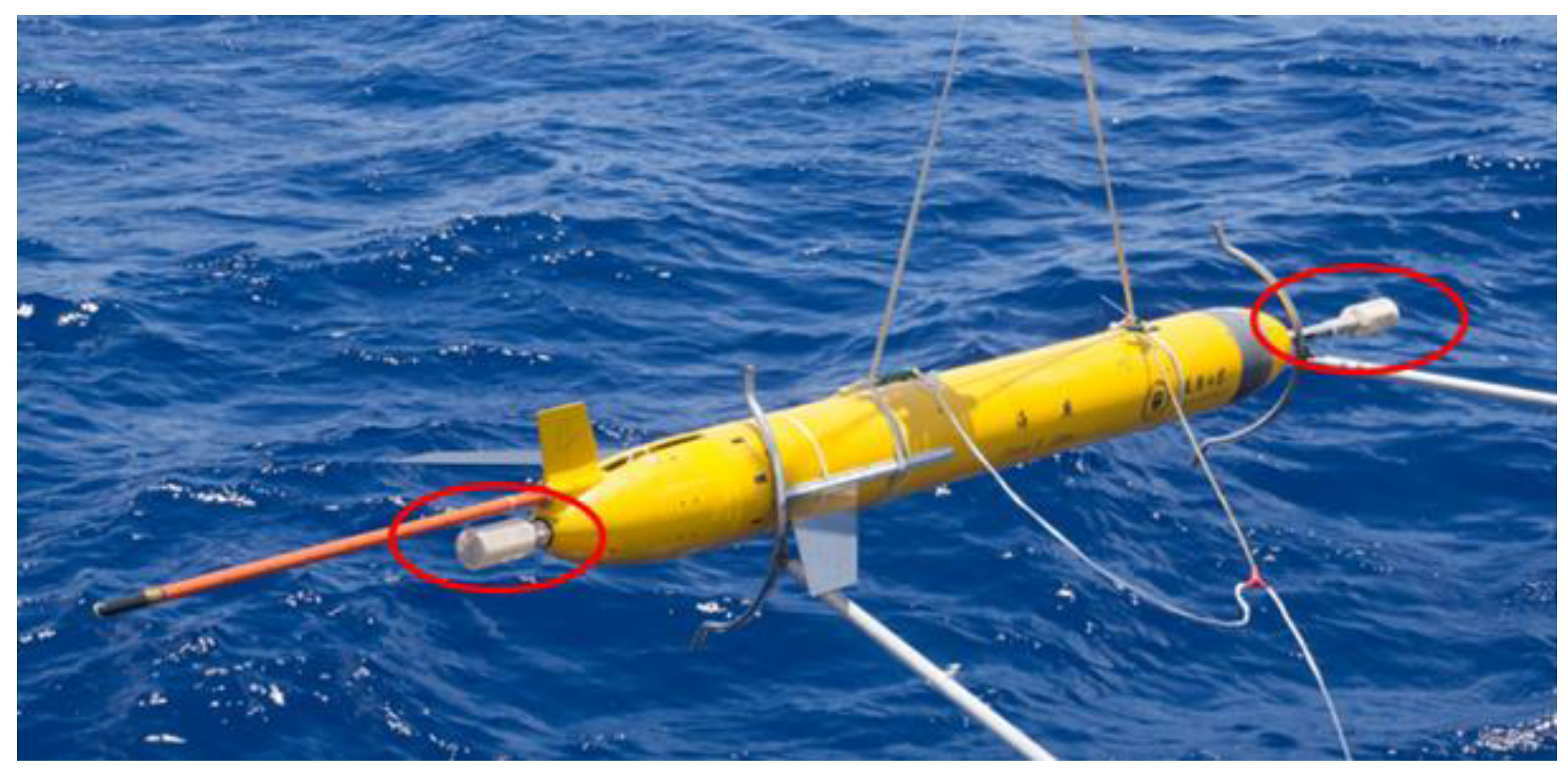
2.1. The Petrel II Glider and the Self-Contained Hydrophones
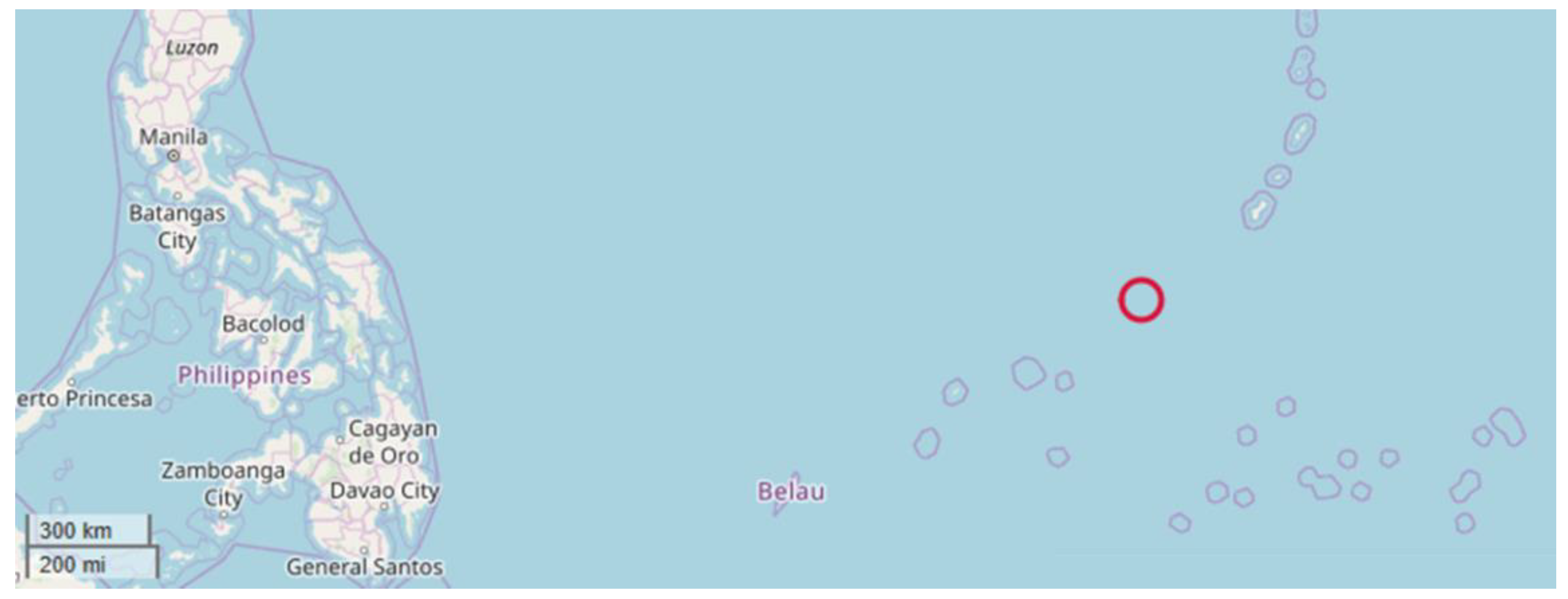
2.2. Experiment Description
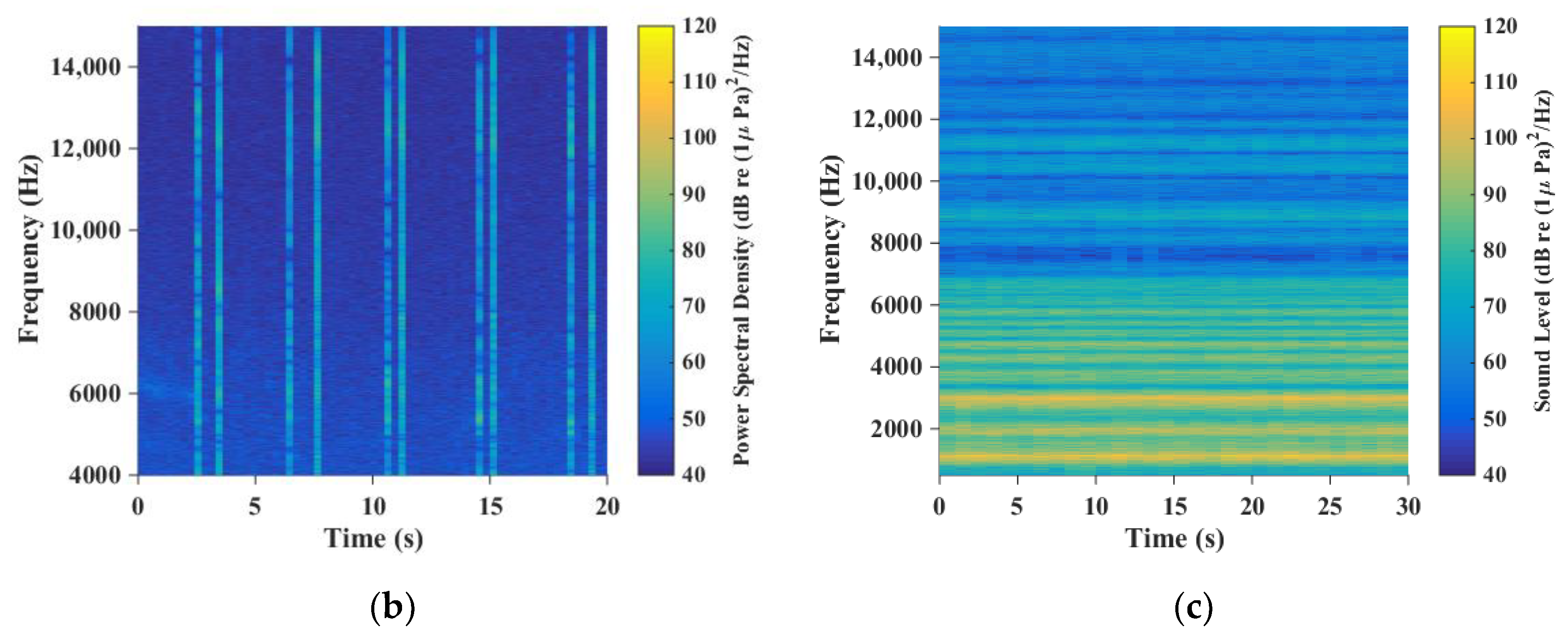
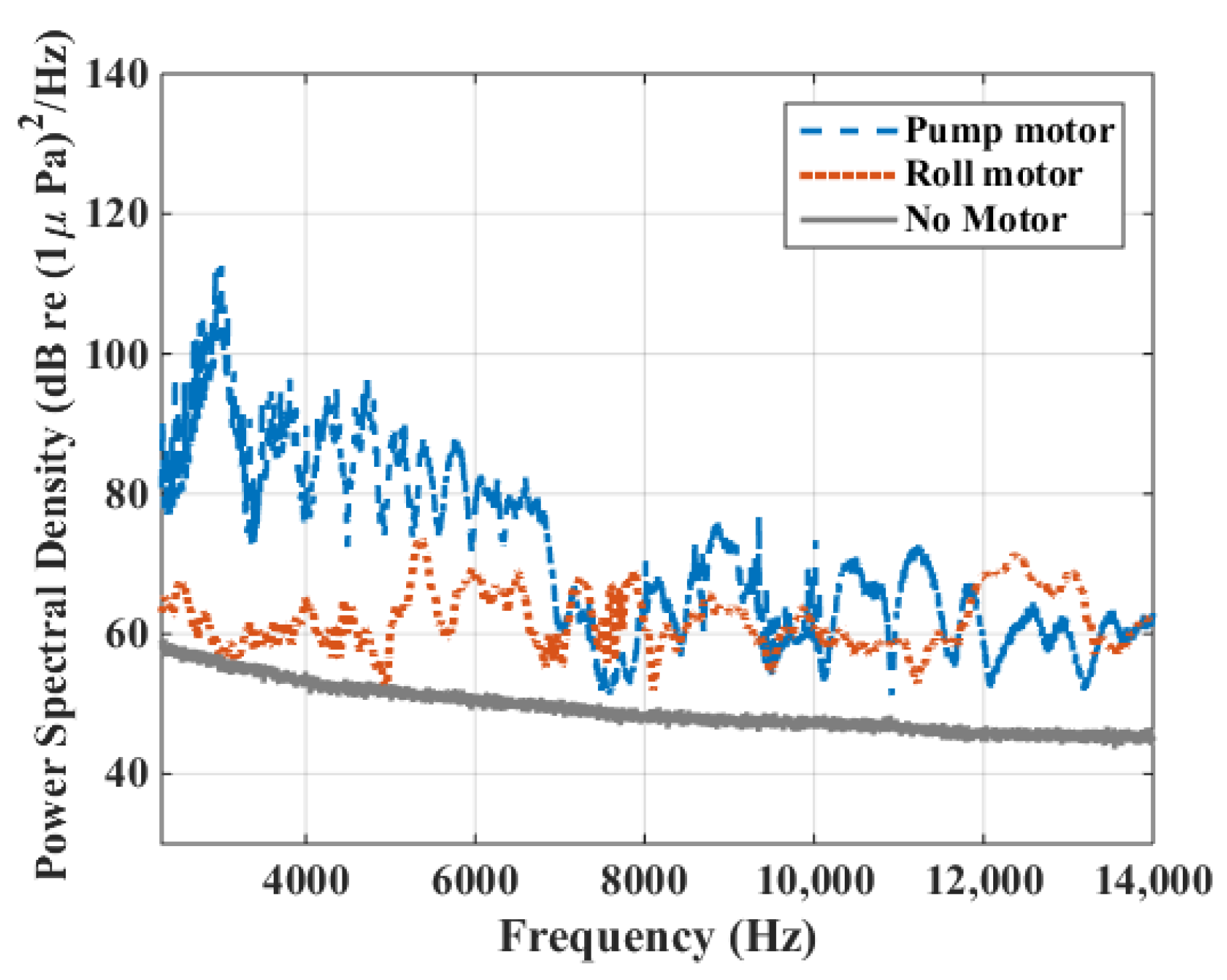
3. Self-Noise of the Petrel II Glider
4. Application of Gliders to Underwater Acoustics
4.1. Ocean Ambient Noise Acquisition
4.2. Underwater Passive Surveillance
4.2.1. Performance of Signal Receiving
4.2.2. Improvement of Signal Receiving Ability via ALE
4.2.3. Performance of Target Azimuth Estimation
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Rudnick, D.L.; Davis, R.E.; Eriksen, C.C.; Fratantoni, D.M.; Perry, M.J. Underwater gliders for ocean research. Mar. Technol. Soc. J. 2004, 38, 73–84. [Google Scholar] [CrossRef]
- Rudnick, D.L. Ocean research enabled by underwater gliders. Annu. Rev. Mar. Sci. 2016, 8, 519–541. [Google Scholar] [CrossRef] [PubMed]
- Nichols, B.; Sabra, K.G. Cross-Coherent vector sensor processing for spatially distributed glider networks. J. Acoust. Soc. Am. 2015, 138, EL329–EL335. [Google Scholar] [CrossRef] [PubMed]
- Meyer, D. Glider technology for ocean observations: A review. Ocean Sci. Discuss. 2016, 2016, 1–26. [Google Scholar] [CrossRef]
- Rogers, E.O.; Genderson, J.G.; Smith, W.S.; Denny, G.F.; Farley, P.J. Underwater acoustic glider. In Proceedings of the 2004 IEEE International Geoscience and Remote Sensing Symposium, Anchorage, AK, USA, 20–24 September 2004; pp. 2241–2244. [Google Scholar]
- Maguer, A.; Dymond, R.; Grati, A.; Stoner, R.; Guerrini, P.; Troiano, L.; Alvarez, A. Ocean gliders payloads for persistent maritime surveillance and monitoring. In Proceedings of the 2013 IEEE OCEANS, San Diego, CA, USA, 23–27 September 2013; pp. 1–8. [Google Scholar]
- Baumgartner, M.F.; Van Parijs, S.M.; Wenzel, F.W.; Tremblay, C.J.; Carter Esch, H.; Warde, A.M. Low frequency vocalizations attributed to sei whales (balaenoptera borealis). J. Acoust. Soc. Am. 2008, 124, 1339–1349. [Google Scholar] [CrossRef] [PubMed]
- Baumgartner, M.F.; Fratantoni, D.M.; Hurst, T.P.; Brown, M.W.; Cole, T.V.; Van Parijs, S.M.; Johnson, M. Real-time reporting of baleen whale passive acoustic detections from ocean gliders. J. Acoust. Soc. Am. 2013, 134, 1814–1823. [Google Scholar] [CrossRef] [PubMed]
- Wall, C.C.; Lembke, C.; Mann, D.A. Shelf-scale mapping of sound production by fishes in the eastern Gulf of Mexico, using autonomous glider technology. Mar. Ecol. Prog. Ser. 2012, 449, 55–64. [Google Scholar] [CrossRef]
- Küsel, E.T.; Munoz, T.; Siderius, M.; Mellinger, D.K.; Heimlich, S.L. Marine mammal tracks from two-hydrophone acoustic recordings made with a glider. Ocean Sci. 2017, 13, 273–288. [Google Scholar] [CrossRef]
- Dassatti, A.; Van der Schaar, M.; Guerrini, P.; Zaugg, S.; Houégnigan, L.; Maguer, A.; Andre, M. On-board underwater glider real-time acoustic environment sensing. In Proceedings of the 2011 IEEE OCEANS, Santander, Spain, 6–9 June 2011; pp. 1–8. [Google Scholar]
- Tesei, A.; Been, R.; Williams, D.; Cardeira, B.; Galletti, D.; Cecchi, D.; Maguer, A. Passive acoustic surveillance of surface vessels using tridimensional array on an underwater glider. In Proceedings of the 2015 IEEE OCEANS, Genoa, Italy, 18–21 May 2015; pp. 1–8. [Google Scholar]
- Cazau, D.; Bonnel, J.; Jouma’a, J.; Le Bras, Y.; Guinet, C. Measuring the marine soundscape of the Indian Ocean with southern elephant seals used as acoustic gliders of opportunity. J. Atmos. Ocean. Technol. 2017, 34, 207–223. [Google Scholar] [CrossRef]
- Bershad, N.; Feintuch, P.; Reed, F.; Fisher, B. Tracking characteristics of the LMS adaptive line enhancer-response to a linear chirp signal in noise. IEEE Trans. Acoust. Speech Signal Process 1980, 28, 504–516. [Google Scholar] [CrossRef]
- Cho, N.I.; Choi, C.H.; Lee, S.U. Adaptive line enhancement by using an IIR lattice notch filter. IEEE Trans. Acoust. Speech Signal Process 1989, 37, 585–589. [Google Scholar]
- Ghogho, M.; Ibnkahla, M.; Bershad, N.J. Analytic behavior of the LMS adaptive line enhancer for sinusoids corrupted by multiplicative and additive noise. IEEE Trans. Signal Process 1998, 46, 2386–2393. [Google Scholar] [CrossRef]
- Liu, L.; Xiao, L.; Lan, S.Q.; Liu, T.T.; Song, G.L. Using Petrel II Glider to analyze underwater noise spectrogram in the South China Sea. Acoust. Aust. 2018, 46, 151–158. [Google Scholar] [CrossRef]
- Liu, F.; Wang, Y.; Wang, S. Development of the hybrid underwater glider Petrel-II. Sea Technol. 2014, 55, 51–54. [Google Scholar]
- Liu, F.; Wang, Y.H.; Wu, Z.L.; Wang, S.X. Motion analysis and trials of the deep sea hybrid underwater glider Petrel-II. China Ocean Eng. 2017, 31, 55–62. [Google Scholar] [CrossRef]
- Yu, J.C.; Zhang, A.Q.; Jin, W.M.; Chen, Q.; Tian, Y.; Liu, C.J. Development and experiments of the sea-wing underwater glider. China Ocean Eng. 2011, 25, 721–736. [Google Scholar] [CrossRef]
- OpenStreetMap. Available online: https://www.openstreetmap.org/copyright (accessed on 23 October 2019).
- Kinsler, L.E.; Frey, A.R.; Mayer, W.G. Fundamentals of Acoustics, 4th ed.; Wiley-VCH: Weinheim, Germany, 1999; pp. 450–452. [Google Scholar]
- Shooter, J.A.; DeMary, T.E.; Wittenborn, A.F. Depth dependence of noise resulting from ship traffic and wind. IEEE J. Oceanic Eng. 1990, 15, 292–298. [Google Scholar] [CrossRef]
- Kay, S. Fundamentals of Statistical Signal Processing, Volume 2: Detection Theory; Prentice Education: Cranbury, NJ, USA, 1998; pp. 465–466. [Google Scholar]
- Hwang, J.; Bose, N.; Fan, S. AUV Adaptive Sampling Methods: A Review. Appl. Sci. 2019, 9, 3145. [Google Scholar] [CrossRef]
- Holmes, J.D.; Carey, W.M.; Lynch, J.F. An overview of unmanned underwater vehicle noise in the low to mid frequency bands. J. Acoust. Soc. Am. 2010, 127, 1812. [Google Scholar] [CrossRef]
- Goldhahn, R.; Braca, P.; LePage, K.D.; Willett, P.; Marano, S.; Matta, V. Environmentally sensitive particle filter tracking in multistatic AUV networks with port-starboard ambiguity. In Proceedings of the 2014 IEEE International Conference on Acoustics, Speech and Signal Processing, Florence, Italy, 4–9 May 2014; pp. 1458–1462. [Google Scholar]
- Jiang, C.; Li, J.; Xu, W. Joint Detection and Tracking via Path Planning in the Mobile Underwater Sensing Network. In Proceedings of the 2018 IEEE 10th International Conference on Wireless Communications and Signal Processing, Hangzhou, China, 18–20 October 2018; pp. 1–6. [Google Scholar]
- Chen, Z.; Xu, W. Joint Passive Detection and Tracking of Underwater Acoustic Target by Beamforming-Based Bernoulli Filter with Multiple Arrays. Sensors 2018, 18, 4022. [Google Scholar] [CrossRef] [PubMed]
- Luo, J.; Han, Y.; Fan, L. Underwater acoustic target tracking: A review. Sensors 2018, 18, 112. [Google Scholar] [CrossRef] [PubMed]
- Hassab, J.; Boucher, R. Optimum estimation of time delay by a generalized correlator. IEEE Trans. Acoust. Speech Signal Process 1979, 27, 373–380. [Google Scholar] [CrossRef]
- Shchepetkin, A.F.; McWilliams, J.C. The regional oceanic modeling system (ROMS): A split-explicit, free-surface, topography-following-coordinate oceanic model. Ocean Model. 2005, 9, 347–404. [Google Scholar] [CrossRef]
- Chen, C.; Liu, H.; Beardsley, R.C. An unstructured grid, finite-volume, three-dimensional, primitive equations ocean model: application to coastal ocean and estuaries. J. Atmos. Ocean. Technol. 2003, 20, 159–186. [Google Scholar] [CrossRef]
- Copernicus Marine Environment Monitoring Service. Available online: http://marine.copernicus.eu/ (accessed on 23 October 2019).




© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jiang, C.; Li, J.; Xu, W. The Use of Underwater Gliders as Acoustic Sensing Platforms. Appl. Sci. 2019, 9, 4839. https://doi.org/10.3390/app9224839
Jiang C, Li J, Xu W. The Use of Underwater Gliders as Acoustic Sensing Platforms. Applied Sciences. 2019; 9(22):4839. https://doi.org/10.3390/app9224839
Chicago/Turabian StyleJiang, Cheng, JianLong Li, and Wen Xu. 2019. "The Use of Underwater Gliders as Acoustic Sensing Platforms" Applied Sciences 9, no. 22: 4839. https://doi.org/10.3390/app9224839