Exploration of Feature Extraction Methods and Dimension for sEMG Signal Classification

 ,
,
Abstract
:1. Introduction
2. Materials and Methods
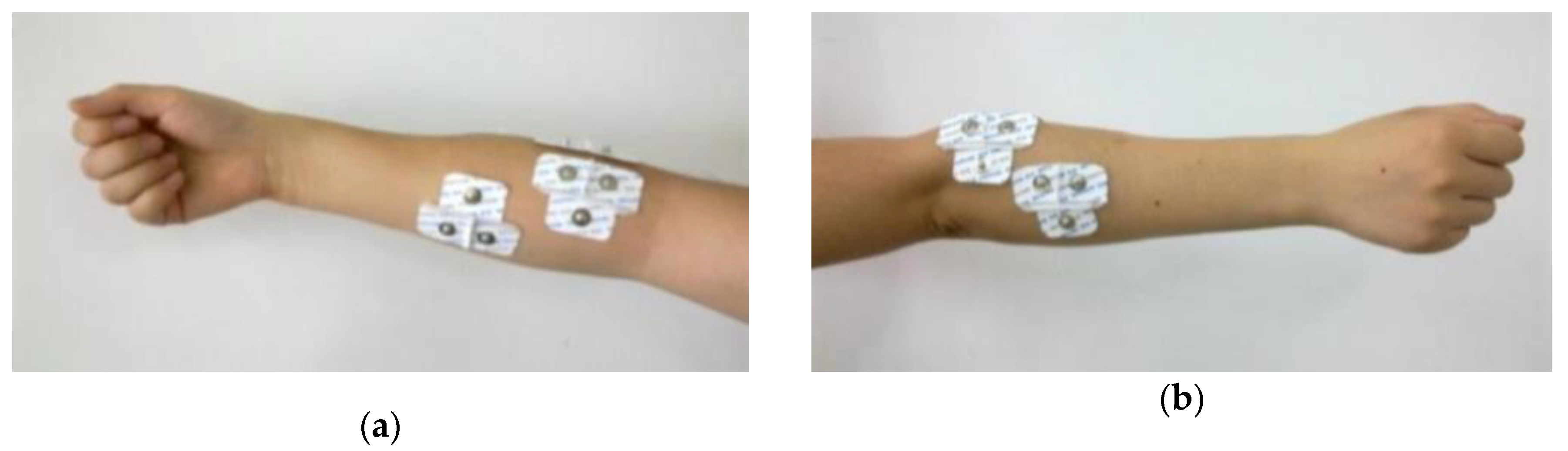
2.1. Materials
2.2. Methods
2.2.1. Feature Computation
- Time-features
- Frequency-features
- Time-frequency features
- Nonlinear dynamics features
2.2.2. Feature Selection
2.2.3. Classification Methods
3. Experiments
3.1. Self-Collecting Signals
3.2. Benchmark Scientific Databases
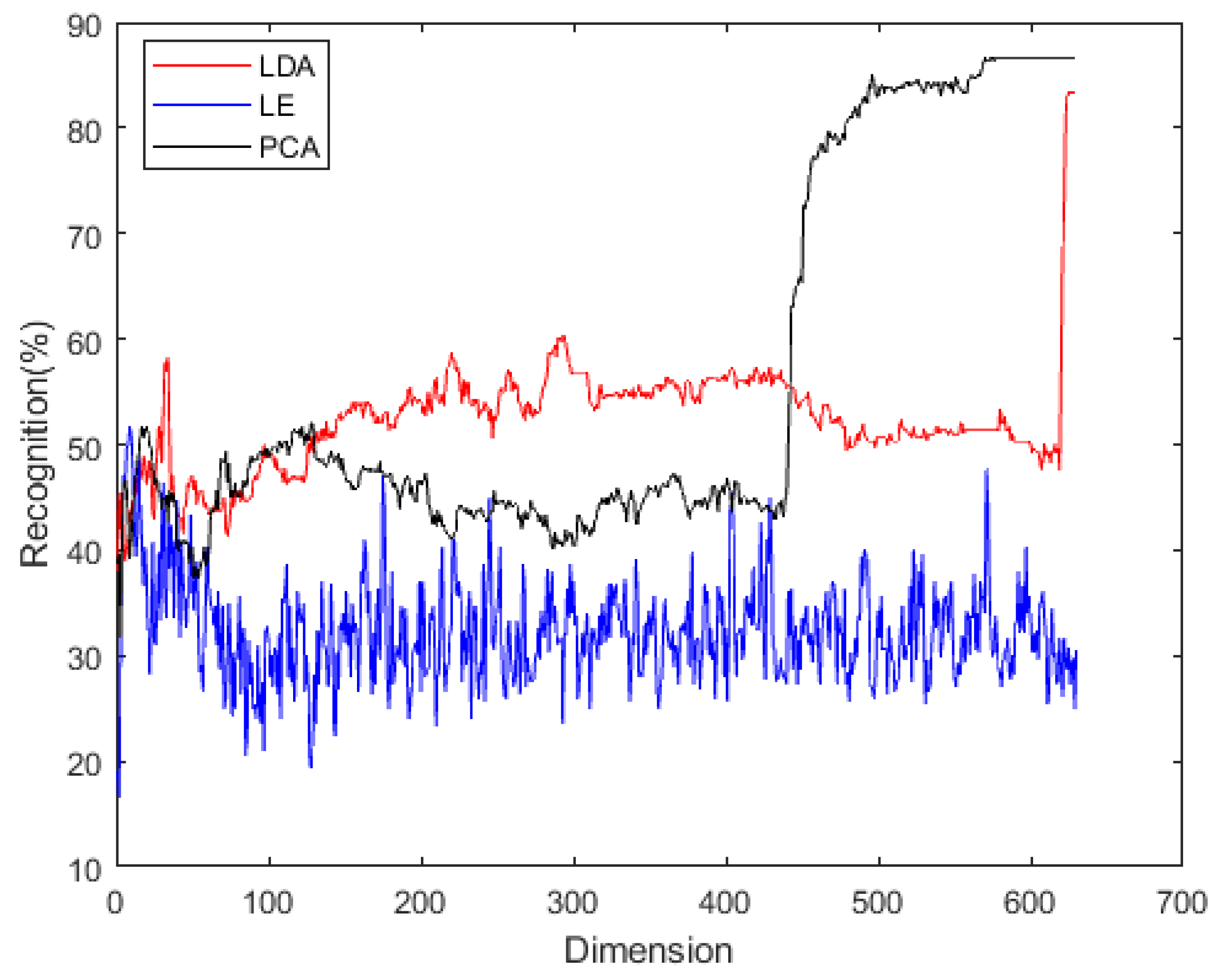
3.2.1. Dimensional Exploration of Similar Gestures
3.2.2. Dimensional Exploration of Different Gestures
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Cheung, V.C.K.; d’Avella, A.; Tresch, M.C.; Bizzi, E. Central and sensory contributions to the activation and organization of muscle synergies during natural motor behaviors. J. Neurosci. 2005, 25, 6419–6434. [Google Scholar] [CrossRef] [PubMed]
- Cho, Y.J.; Kim, J.Y. The effects of load, flexion, twisting and window size on the stationarity of trunk muscle EMG signals. Int. J. Ind. Ergon. 2012, 42, 287–292. [Google Scholar] [CrossRef]
- Gioioso, G.; Salvietti, G.; Malvezzi, M.; Prattichizzo, D. An Object-Based Approach to Map Human Hand Synergies onto Robotic Hands with Dissimilar Kinematics. In Robotics: Science and Systems VIII; MIT Press: Sydney, Australia, 2012; p. 504. [Google Scholar]
- Shi, W.T.; Lyu, Z.J.; Tang, S.T.; Chia, T.L.; Yang, C.Y. A bionic hand controlled by hand gesture recognition based on surface EMG signals: A preliminary study. Biocybern. Biomed. Eng. 2018, 38, 126–135. [Google Scholar] [CrossRef]
- Naik, G.R.; Al-Ani, A.; Gobbo, M.; Nguyen, H.T. Does Heel Height Cause Imbalance during Sit-to-Stand Task: Surface EMG Perspective. Front. Physiol. 2017, 8, 626. [Google Scholar] [CrossRef]
- Rehman, M.Z.U.; Gilani, S.O.; Waris, A.; Niazi, I.K.; Slabaugh, G.; Farina, D.; Kamavuako, E.N. Stacked Sparse Autoencoders for EMG-Based Classification of Hand Motions: A Comparative Multi Day Analyses between Surface and Intramuscular EMG. Appl. Sci. 2018, 8, 1126. [Google Scholar] [CrossRef] [Green Version]
- Naik, G.R.; Selvan, S.E.; Nguyen, H.T. Single-Channel EMG Classification with Ensemble-Empirical-Mode-Decomposition-Based ICA for Diagnosing Neuromuscular Disorders. IEEE Trans. Neural Syst. Rehabil. Eng. 2016, 24, 734–743. [Google Scholar] [CrossRef]
- Bai, X.P. Present situation, trend and goals of forestry mechanization in Japan. For. Sci. Technol. 1994, 11, 32–33. [Google Scholar]
- Li, W.B.; Huo, G.Q.; Feng, M. Study on technology and machine of standing tree pruning. For. Eng. 2009, 25, 32–34. [Google Scholar]
- Zhang, J.M.; Li, W.B.; Sa, C. Wireless transmitter control system of automatic pruning machine based on EDA technology. For. Mach. Wood Work. Equip. 2006, 34, 23–25. [Google Scholar]
- Naik, G.R.; Arjunan, S.; Kumar, D. Applications of ICA and fractal dimension in sEMG signal processing for subtle movement analysis: A review. Australas. Phys. Eng. Sci. Med. 2011, 34, 179–193. [Google Scholar] [CrossRef]
- Zhan, L.; Zhu, X.L.; Ma, Y. The design of small skidder for intermediate cutting area. J. For. Eng. 2016, 1, 97–102. [Google Scholar]
- Hudgins, B.; Parker, P.; Scott, R. A new strategy for multifunction myoelectric control. IEEE Trans. Biomed. Eng. 1993, 40, 82–94. [Google Scholar] [CrossRef] [PubMed]
- Karlik, B.; Tokhi, M.O.; Alci, M. A fuzzy clustering neural network architecture for multifunction upper-limb prosthesis. IEEE Trans. Biomed. Eng. 2003, 50, 1255–1261. [Google Scholar] [CrossRef] [PubMed]
- Zardoshti-Kermani, M.; Wheeler, B.C.; Badie, K.; Hashemi, R.M. EMG feature evaluation for movement control of upper extremity prostheses. IEEE Trans. Neural Syst. Rehabil. Eng. 1995, 3, 324–333. [Google Scholar] [CrossRef]
- Kim, K.S.; Choi, H.H.; Moon, C.S.; Mun, C.W. Comparison of k-nearest neighbor, quadratic discriminant and linear discriminant analysis in classification of electromyogram signals based on the wrist-motion directions. Curr. Appl. Phys. 2011, 11, 740–745. [Google Scholar] [CrossRef]
- Boostani, R.; Moradi, M.H. Evaluation of the forearm EMG signal features for the control of a prosthetic hand. Physiol. Meas. 2003, 24, 309–319. [Google Scholar] [CrossRef] [Green Version]
- Oskoei, M.A.; Hu, H. Support vector machine based classification scheme for myoelectric control applied to upper limb. IEEE Trans. Biomed. Eng. 2008, 55, 1956–1965. [Google Scholar] [CrossRef]
- Kumar, D.K.; Pah, N.D.; Bradley, A. Wavelet analysis of surface electromyography to determine muscle fatigue. IEEE Trans. Neural Syst. Rehabil. Eng. 2003, 11, 400–406. [Google Scholar] [CrossRef]
- Kiatpanichagij, K.; Afzulpurkar, N. Use of supervised discretization with PCA in wavelet packet transformation-based surface electromyogram classification. Biomed. Signal Process. Control 2009, 4, 127–138. [Google Scholar] [CrossRef]
- Rosso, O.A.; Blanco, S.; Yordanova, J.; Kolev, V.; Figliola, A.; Schurmann, M.; Basar, E. Wavelet entropy: A new tool for analysis of short duration brain electrical signals. J. Neurosci. Methods 2001, 105, 65–75. [Google Scholar] [CrossRef]
- Zhang, X.; Zhou, P. Sample entropy analysis of surface EMG for improved muscle activity onset detection against spurious background spikes. J. Electromyogr. Kinesiol. 2012, 22, 901–907. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Phinyomark, A.; Phukpattaranont, P.; Limsakul, C. Feature reduction and selection for EMG signal classification. Expert Syst. Appl. 2012, 39, 7420–7431. [Google Scholar] [CrossRef]
- Bakshi, K.; Manjunatha, M.; Kumar, C.S. Estimation of continuous and constraint-free 3 DoF wrist movements from surface electromyogram signal using kernel recursive least square tracker. Biomed. Signal Process. Control 2018, 46, 104–115. [Google Scholar] [CrossRef]
- Fairley, J.A.; Georgoulas, G.; Smart, O.L.; Dimakopoulos, G.; Karvelis, P.; Stylios, C.D.; Rye, D.B.; Bliwise, D.L. Wavelet analysis for detection of phasic electromyographic activity in sleep: Influence of mother wavelet and dimensionality reduction. Comput. Biol. Med. 2014, 48, 77–84. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Xing, K.X.; Yang, P.P.; Huang, J.; Wang, Y.J.; Zhu, Q.M. A real-time EMG pattern recognition method for virtual myoelectric hand control. Neurocomputing 2014, 136, 345–355. [Google Scholar] [CrossRef]
- Xie, H.B.; Zhou, P.; Guo, T.R.; Sivakumar, B.; Zhang, X.; Dokos, S. Multiscale Two-Directional Two-Dimensional Principal Component Analysis and Its Application to High-Dimensional Biomedical Signal Classification. IEEE Trans. Biomed. Eng. 2016, 63, 1416–1425. [Google Scholar] [CrossRef]
- Wang, N.F.; Lao, K.Y.; Zhang, X.H.; Lin, J.F.; Zhang, X.M. The recognition of grasping force using LDA. Biomed. Signal Process. Control 2019, 47, 393–400. [Google Scholar] [CrossRef]
- Hu, X.H.; Kan, J.M.; Li, W.B. Classification of surface electromyogram signals based on directed acyclic graphs and support vector machines. Turk. J. Electr. Eng. Comput. Sci. 2018, 26, 732–742. [Google Scholar] [CrossRef]
- Miller, C.J. Real-Time Feature Extraction and Classification of Prehensile EMG Signals. Master’s Thesis, San Diego State University, San Diego, CA, USA, 2008. [Google Scholar]
- Wang, N.F.; Chen, Y.L.; Zhang, X.M. Realtime recognition of multi-finger prehensile gestures. Biomed. Signal Process. Control 2014, 13, 262–269. [Google Scholar] [CrossRef]
- Park, S.H.; Lee, S.P. EMG pattern recognition based on artificial intelligence techniques. IEEE Trans. Neural Syst. Rehabil. Eng. 1998, 6, 400–405. [Google Scholar] [CrossRef]
- Du, S.; Vuskovic, M. Temporal vs. spectral approach to feature extraction from prehensile EMG signals. In Proceedings of the IEEE International Conference on Information Reuse and Integration, Las Vegas, NV, USA, 8–10 November 2004; pp. 344–350. [Google Scholar]
- Rønager, J.; Christensen, H.; Fuglsang-Frederiksen, A. Power spectrum analysis of the EMG pattern in normal and diseased muscles. J. Neurol. Sci. 1989, 94, 283–294. [Google Scholar] [CrossRef]
- Potluri, C.; Anugolu, M.; Schoen, M.P.; Naidu, D.S.; Urfer, A.; Chiu, S. Hybrid fusion of linear, non-linear and spectral models for the dynamic modeling of sEMG and skeletal muscle force. Comput. Biol. Med. 2013, 43, 1815–1826. [Google Scholar] [CrossRef] [PubMed]
- Klema, V.; Laub, A. The singular value decomposition: Its computation and some applications. IEEE Trans. Autom. Control 1980, 25, 164–176. [Google Scholar] [CrossRef] [Green Version]
- Barmpakos, D.; Strimpakos, N.; Karkanis, S.A.; Pattichis, C. Towards a Versatile Surface Electromyography Classification System. In XIV Mediterranean Conference on Medical and Biological Engineering and Computing 2016; Springer International Publishing: Berlin/Heidelberg, Germany, 2016. [Google Scholar]
- Jiang, M.; Wang, R.; Wang, J.; Jin, D. A Method of Recognizing Finger Motion Using Wavelet Transform of Surface EMG Signal. In Proceedings of the IEEE Engineering in Medicine and Biology Society, Shanghai, China, 17–18 January 2005; Volume 3, pp. 2672–2674. [Google Scholar]
- Lucas, M.F.; Gaufriau, A.; Pascual, S.; Doncarli, C.; Farina, D. Multi-channel surface emg classification using support vector machines and signal-based wavelet optimization. Biomed. Signal Process. Control 2008, 3, 169–174. [Google Scholar] [CrossRef]
- Chu, J.U.; Moon, I.; Lee, Y.J.; Kim, S.K.; Mun, M.S. A Supervised Feature-Projection-Based Real-Time EMG Pattern Recognition for Multifunction Myoelectric Hand Control. IEEE ASME Trans. Mechatron. 2007, 12, 282–290. [Google Scholar] [CrossRef]
- Rong, Y.; Hao, D.; Han, X.; Zhang, Y.; Zhang, J.; Zeng, Y. Classification of surface emgs using wavelet packet energy analysis and a genetic algorithm-based support vector machine. Neurophysiology 2013, 45, 39–48. [Google Scholar] [CrossRef]
- Guo, Y.; Naik, G.R.; Huang, S.; Abraham, A.; Nguyen, H.T. Nonlinear multiscale maximal lyapunov exponent for accurate myoelectric signal classification. Appl. Soft Comput. 2015, 36, 633–640. [Google Scholar] [CrossRef]
- Zhang, Z.Y.; Zha, H.Y. Principal manifolds and nonlinear dimensionality reduction via tangent space alignment. SIAM J. Sci. Comput. 2004, 8, 313–338. [Google Scholar] [CrossRef] [Green Version]
- Cao, L.J.; Chua, K.S.; Chong, W.K.; Lee, H.P.; Gu, Q.M. A comparison of PCA, KPCA and ICA for dimensionality reduction in support vector machine. Neurocomputing 2003, 55, 321–336. [Google Scholar] [CrossRef]
- Lawrence, N. Probabilistic non-linear principal component analysis with Gaussian process latent variable models. J. Mach. Learn. Res. 2005, 6, 1783–1816. [Google Scholar]
- Ma, L.; Crawford, M.M.; Tian, J.W. Local Manifold Learning-Based-Nearest-Neighbor for Hyperspectral Image Classification. IEEE Trans. Geosci. Remote 2010, 48, 4099–4109. [Google Scholar] [CrossRef]
- Verikas, A.; Gelzinis, A.; Bacauskiene, M. Mining data with random forests: A survey and results of new tests. Pattern Recognit. 2011, 44, 330–349. [Google Scholar] [CrossRef]
- Venugopal, G.; Navaneethakrishna, M.; Ramakrishnan, S. Extraction and analysis of multiple time window features associated with muscle fatigue conditions using sEMG signals. Expert Syst. Appl. 2014, 41, 2652–2659. [Google Scholar] [CrossRef]
- Alkan, A.; Cunay, M. Identification of EMG signals using discriminant analysis and SVM classifier. Expert Syst. Appl. 2012, 39, 44–47. [Google Scholar] [CrossRef]
- Ren, C.; An, N.; Wang, J.; Li, L.; Hu, B.; Shang, D. Optimal parameters selection for BP neural network based on particle swarm optimization: A case study of wind speed forecasting. Knowl. Based Syst. 2014, 56, 226–239. [Google Scholar] [CrossRef]
- Karthick, P.A.; Ghosh, D.M.; Ramakrishnan, S. Surface electromyography based muscle fatigue detection using high-resolution time-frequency methods and machine learning algorithms. Comput. Methods Programs Biomed. 2018, 154, 45–56. [Google Scholar] [CrossRef]
- Atzori, M.; Gijsberts, A.; Castellini, C.; Caputo, B.; Hager, A.G.M.; Elsig, S.; Giatsidis, G.; Bassetto, F.; Muller, H. Electromyography data for non-invasive naturally-controlled Robotic hand prostheses. Sci. Data 2014, 1, 140053. [Google Scholar] [CrossRef] [Green Version]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Feature Extraction Methods | Classification Methods | Best Classification Rates (%) | Optimal Dimensions | Average of Optimal Dimensions |
|---|---|---|---|---|
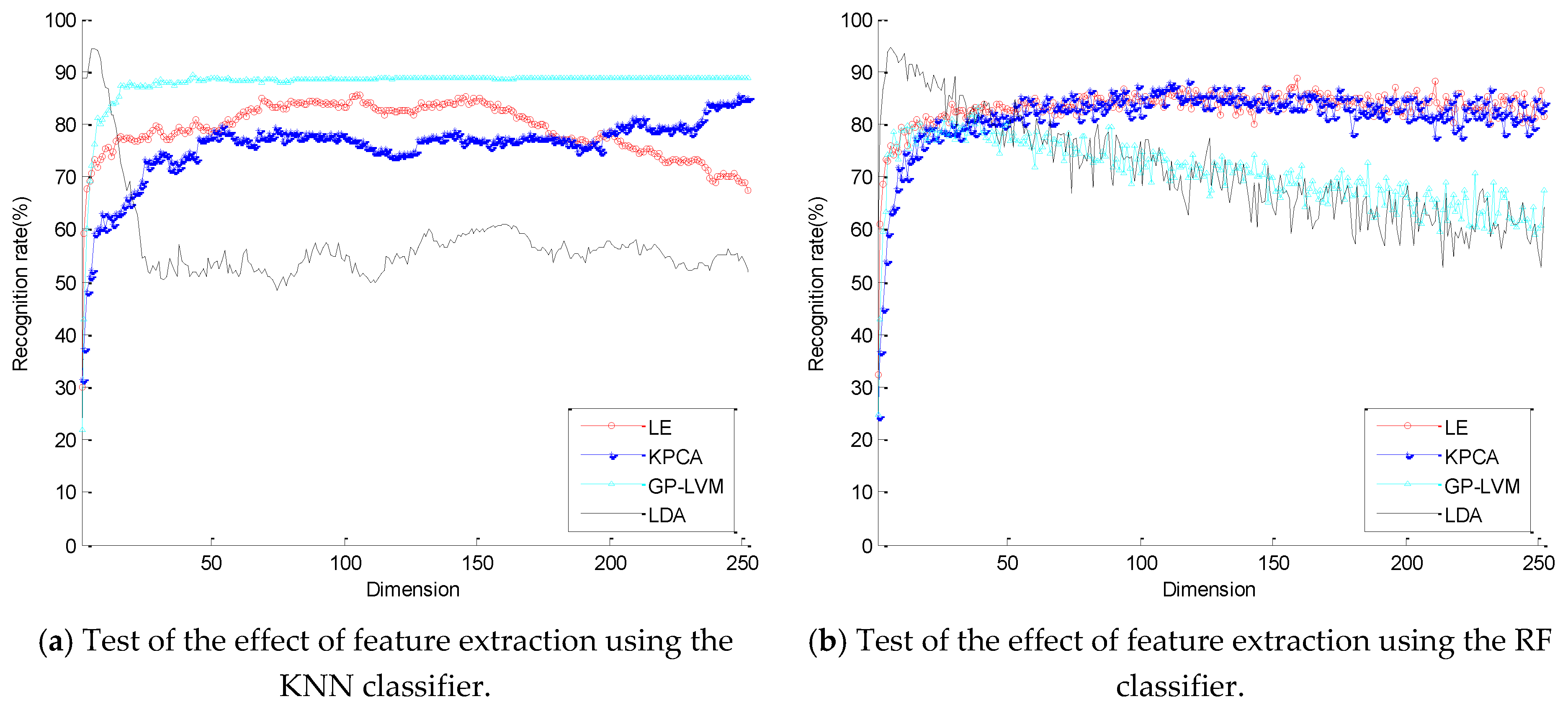
| LE | KNN | 85.56 | 105 | 104.2 |
| RF | 88.89 | 159 | ||
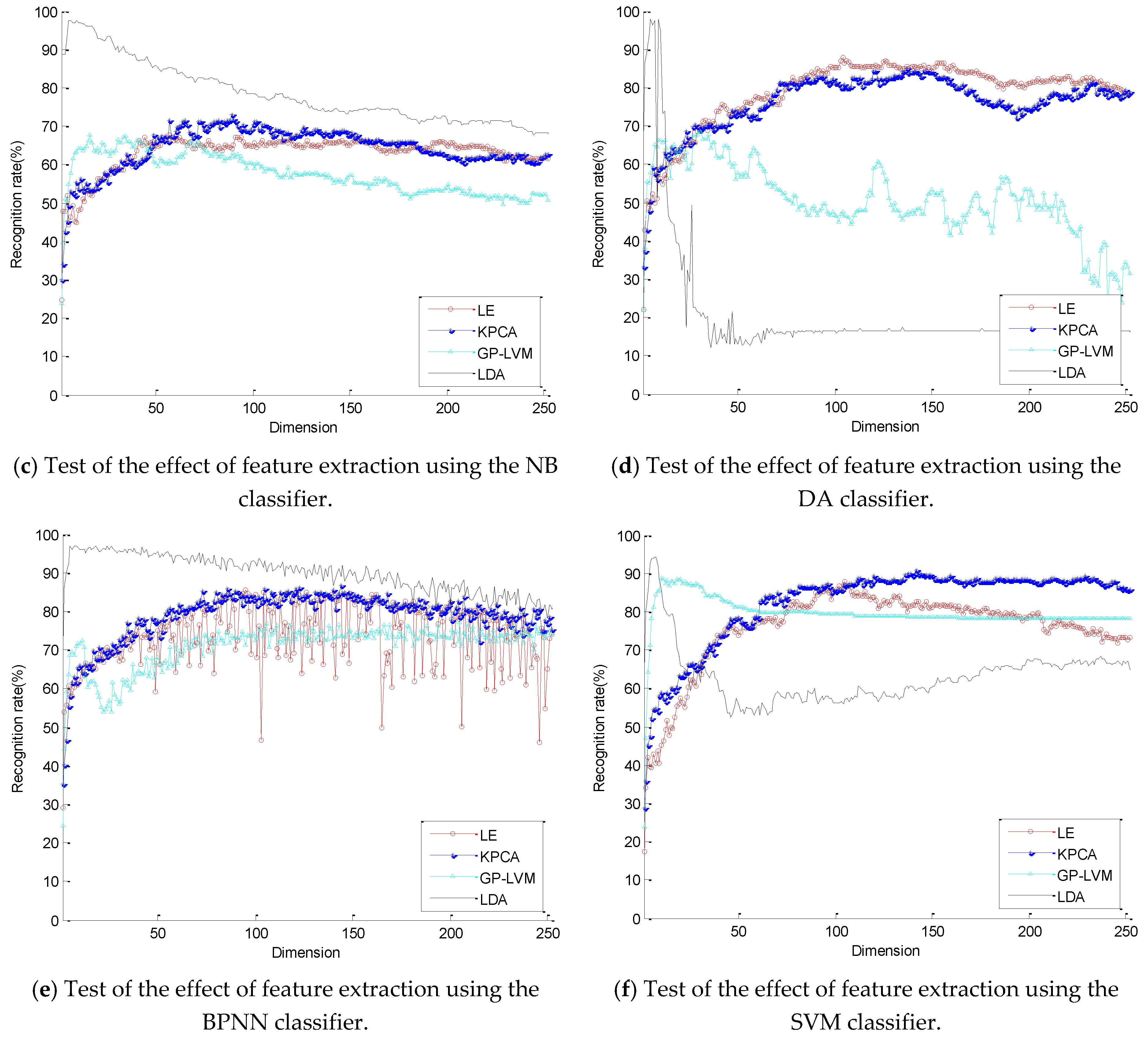
| NB | 67.78 | 57 | ||
| DA | 87.78 | 104 | ||
| BPNN | 85.43 | 95 | ||
| SVM | 87.78 | 105 | ||
| KPCA | KNN | 85.56 | 249 | 146.5 |
| RF | 88.15 | 118 | ||
| NB | 72.96 | 89 | ||
| DA | 84.81 | 137 | ||
| BPNN | 86.79 | 144 | ||
| SVM | 90.74 | 142 | ||
| GP-LVM | KNN | 89.26 | 43 | 57.2 |
| RF | 83.33 | 39 | ||
| NB | 67.78 | 16 | ||
| DA | 68.52 | 30 | ||
| BPNN | 77.04 | 205 | ||
| SVM | 88.89 | 10 | ||
| LDA | KNN | 94.44 | 5 | 6.0 |
| RF | 94.44 | 6 | ||
| NB | 97.41 | 5 | ||
| DA | 97.78 | 5 | ||
| BPNN | 97.04 | 8 | ||
| SVM | 94.44 | 7 |
| Subject Number | KNN/% | RF/% | NB/% | DA/% | BPNN/% |
|---|---|---|---|---|---|
| 1 | 93.3 | 96.7 | 98.3 | 98.3 | 100.0 |
| 2 | 100.0 | 95.6 | 98.3 | 96.7 | 96.7 |
| 3 | 98.3 | 94.4 | 98.3 | 96.7 | 98.3 |
| 4 | 98.3 | 97.8 | 100.0 | 96.7 | 100.0 |
| 5 | 95.0 | 96.1 | 95.0 | 98.3 | 98.3 |
| 6 | 100.0 | 97.8 | 96.7 | 98.3 | 100.0 |
| 7 | 96.7 | 95.0 | 95.0 | 96.7 | 93.3 |
| 8 | 100.0 | 94.4 | 98.3 | 98.3 | 96.7 |
| 9 | 98.3 | 98.3 | 100.0 | 100.0 | 100.0 |
| 10 | 93.3 | 96.7 | 98.3 | 100.0 | 96.7 |
| 11 | 96.7 | 97.2 | 98.3 | 98.3 | 93.3 |
| 12 | 100.0 | 96.7 | 98.3 | 98.3 | 100.0 |
| 13 | 100.0 | 93.9 | 100.0 | 100.0 | 96.7 |
| 14 | 96.7 | 91.7 | 93.3 | 96.7 | 95.0 |
| 15 | 95.0 | 93.9 | 100.0 | 100.0 | 100.0 |
| Averaged (mean ± SD) | 97.4 ± 2.3 | 95.7 ± 1.8 | 97.9 ± 2.0 | 98.2 ± 1.3 | 97.7 ± 2.3 |
| Gestures | KNN/% | RF/% | NB/% | DA/% | BPNN/% |
|---|---|---|---|---|---|
| 1 | 100.0 | 97.3 | 97.3 | 98.0 | 98.7 |
| 2 | 98.0 | 93.3 | 97.3 | 98.0 | 95.3 |
| 3 | 98.7 | 96.9 | 99.3 | 98.0 | 100.0 |
| 4 | 99.3 | 98.0 | 98.0 | 98.0 | 97.3 |
| 5 | 96.7 | 94.2 | 99.3 | 99.3 | 98.7 |
| 6 | 92.0 | 94.7 | 96.0 | 98.0 | 96.0 |
| Averaged (mean ± SD) | 97.4 ± 2.7 | 95.7 ± 1.7 | 97.9 ± 1.2 | 98.2 ± 0.5 | 97.7 ± 1.6 |
| a | ||
|---|---|---|
| Gesture Combinations | Best Classification Rate (%) | Optimal Dimensions |
 | 100.0 | 504 |
 | 99.22 | 504 |
 | 99.22 | 507 |
 | 99.21 | 511 |
 | 99.18 | 503 |
 | 98.95 | 507 |
 | 98.92 | 515 |
 | 98.70 | 504 |
 | 98.64 | 523 |
 | 98.64 | 499 |
| b | ||
| Gesture Combinations | Best Classification Rate (%) | Optimal Dimensions |
 | 73.94 | 29 |
 | 71.54 | 16 |
 | 70.82 | 34 |
 | 70.51 | 11 |
 | 68.99 | 44 |
 | 68.11 | 23 |
 | 68.07 | 58 |
 | 67.90 | 22 |
 | 67.87 | 59 |
 | 67.72 | 58 |
| Gesture Combinations | Best Classification Rate (%) | Optimal Dimensions |
|---|---|---|
 | 98.29 | 567 |
 | 98.21 | 549 |
 | 97.88 | 533 |
 | 97.71 | 508 |
 | 97.71 | 560 |
 | 97.70 | 535 |
 | 97.64 | 527 |
 | 97.16 | 517 |
 | 97.15 | 551 |
 | 97.03 | 549 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, Y.; Hu, X.; Wang, Z.; Wen, J.; Kan, J.; Li, W. Exploration of Feature Extraction Methods and Dimension for sEMG Signal Classification. Appl. Sci. 2019, 9, 5343. https://doi.org/10.3390/app9245343
Wu Y, Hu X, Wang Z, Wen J, Kan J, Li W. Exploration of Feature Extraction Methods and Dimension for sEMG Signal Classification. Applied Sciences. 2019; 9(24):5343. https://doi.org/10.3390/app9245343
Chicago/Turabian StyleWu, Yutong, Xinhui Hu, Ziwei Wang, Jian Wen, Jiangming Kan, and Wenbin Li. 2019. "Exploration of Feature Extraction Methods and Dimension for sEMG Signal Classification" Applied Sciences 9, no. 24: 5343. https://doi.org/10.3390/app9245343