Design of a New Bilayer Multipole Electromagnetic Brake System for a Haptic Interface


Abstract
1. Introduction
2. Modelling of a Magnetic Brake
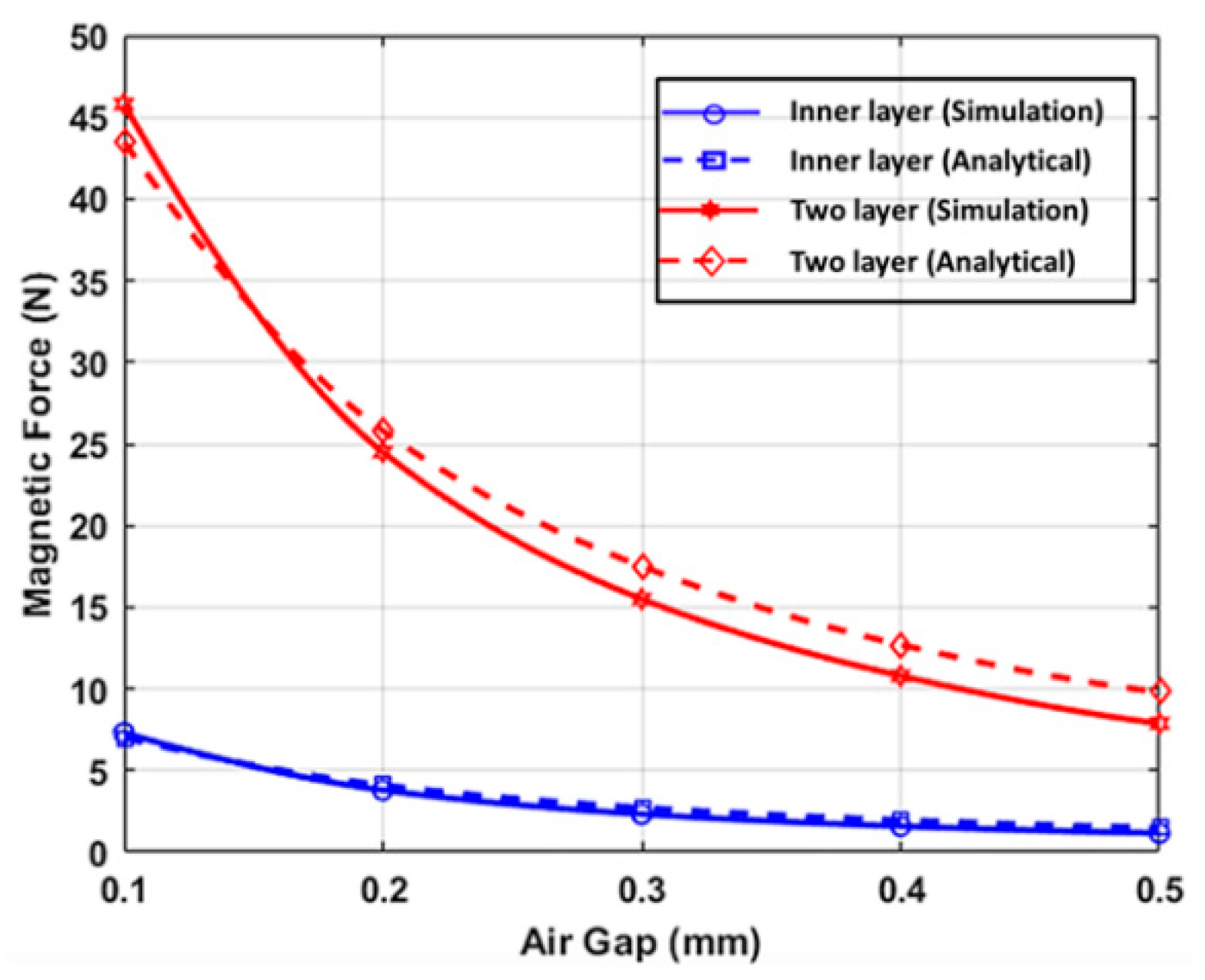
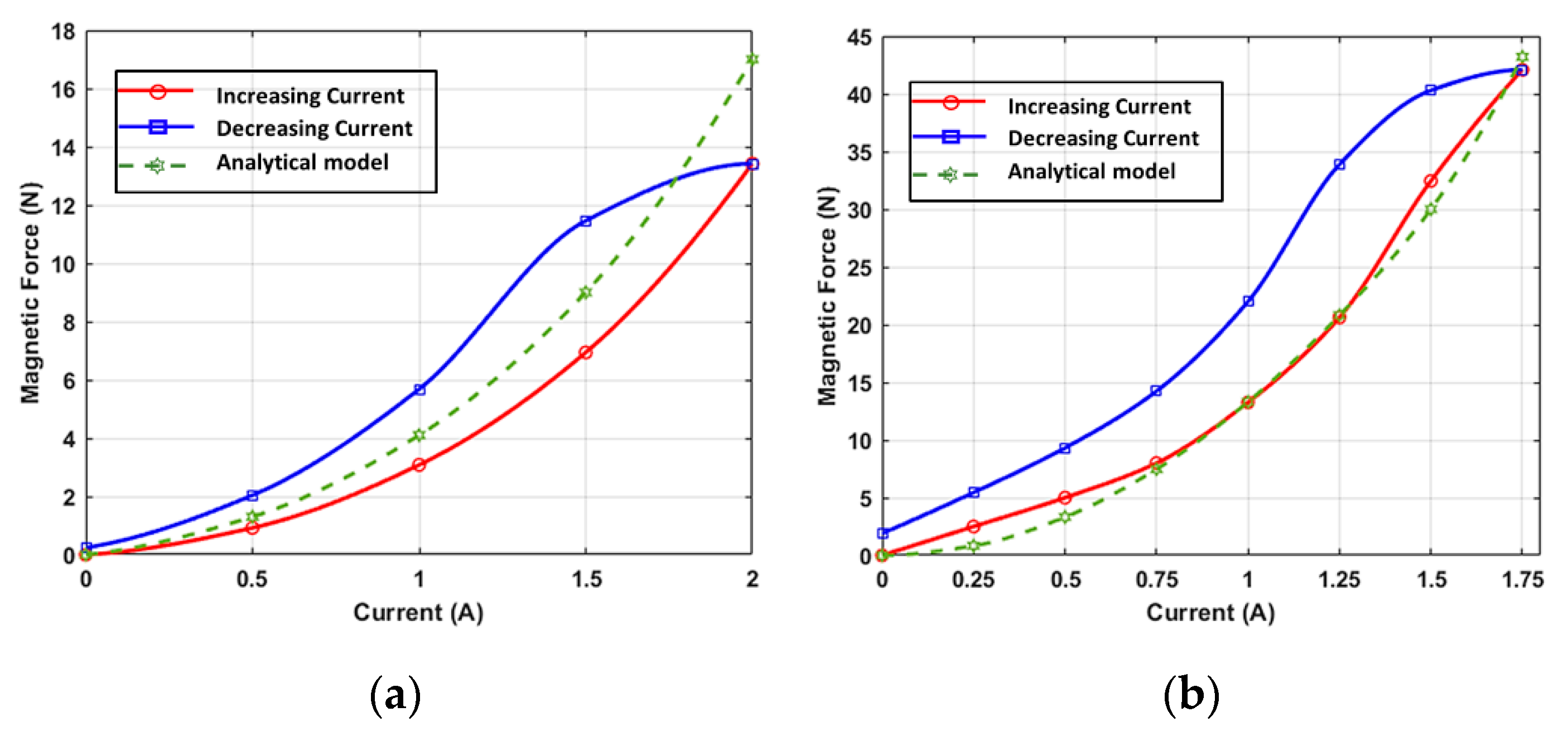
2.1. Magnetic Force
2.2. Braking Torque
2.3. Power Consumption
2.4. Inductive Time Constant
3. Multi-Objective Optimization
4. FEM-Based Magnetostatics Simulations
5. Experimental Evaluation
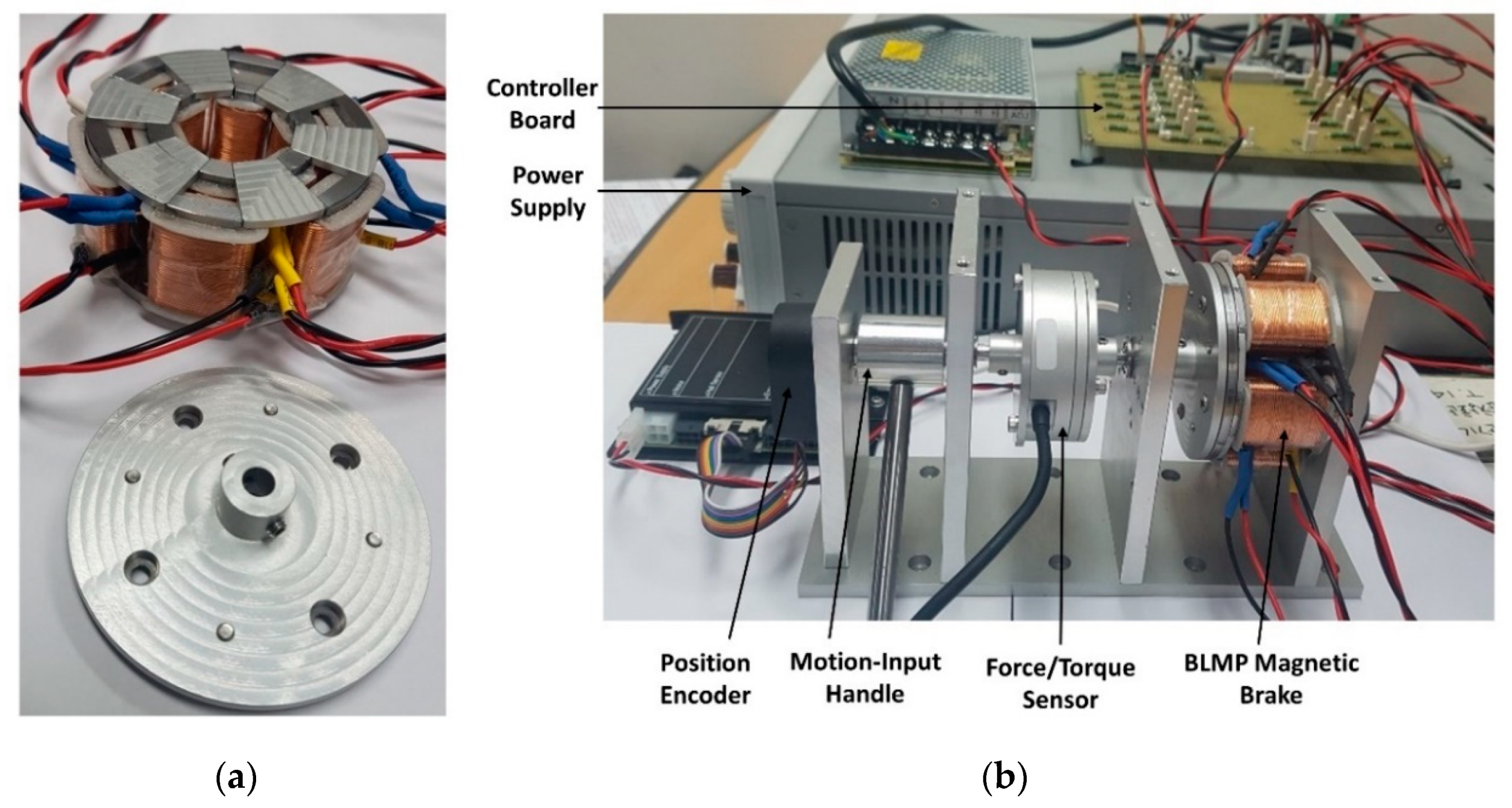
5.1. Experimental Setup
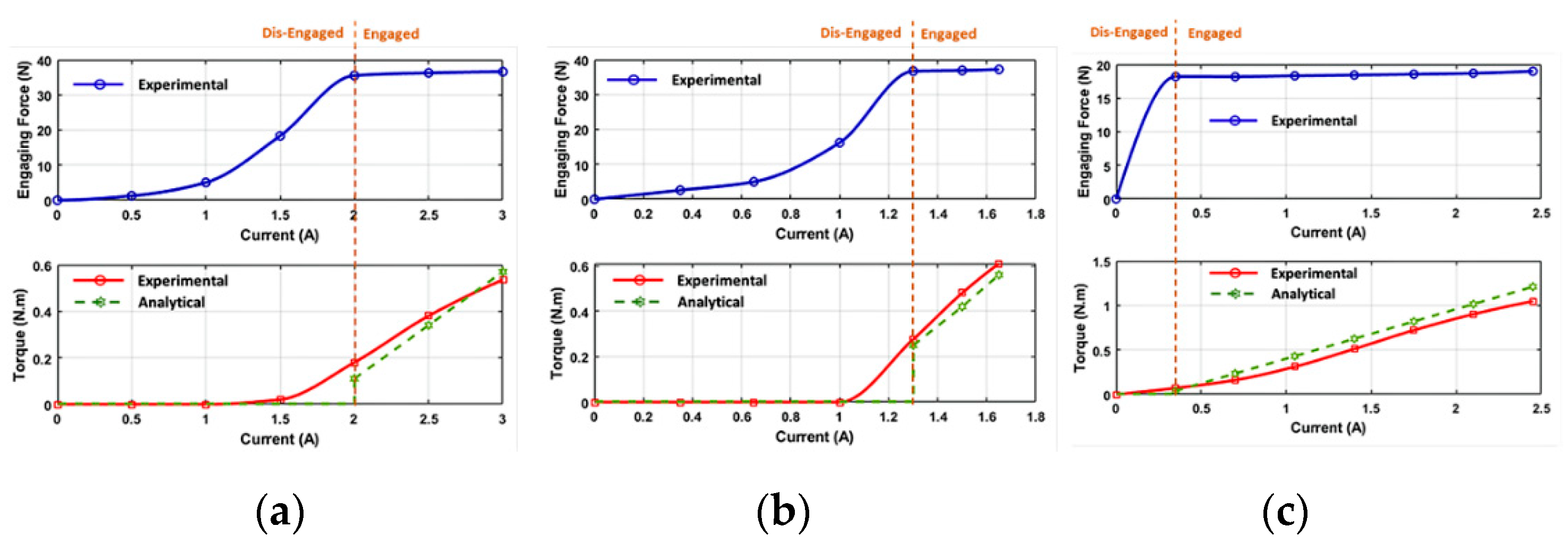
5.2. Force and Torque Characteristics
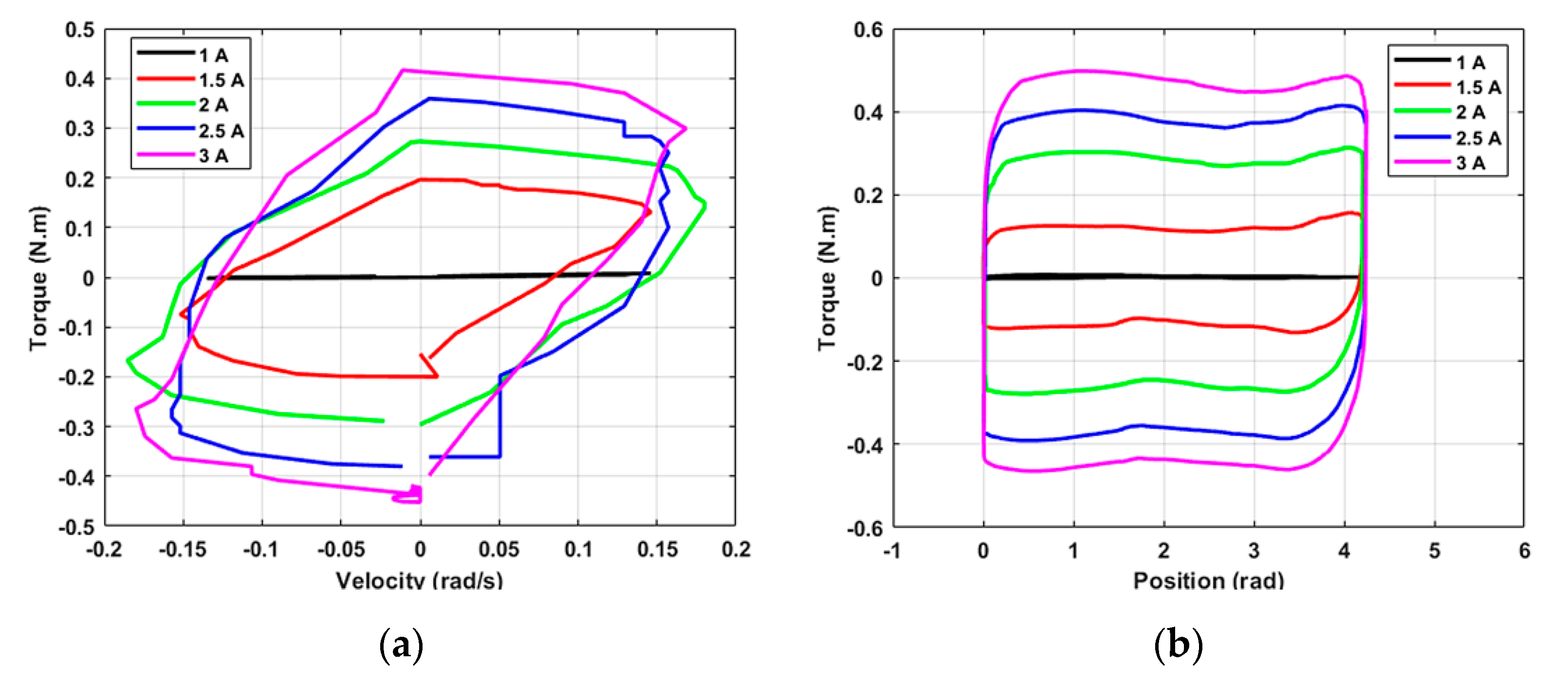
5.3. Damping Characteristics
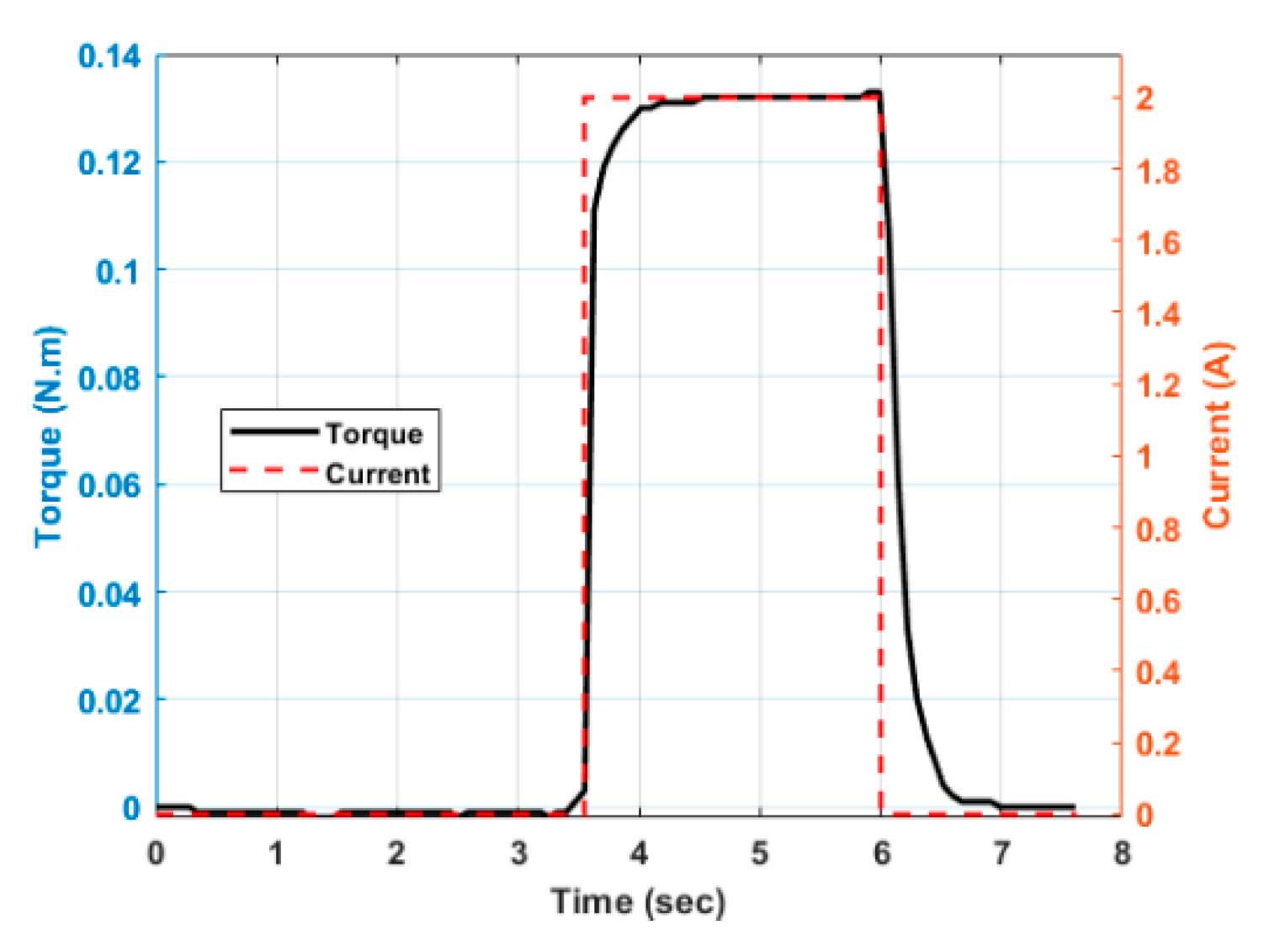
5.4. Transient Time Characteristics
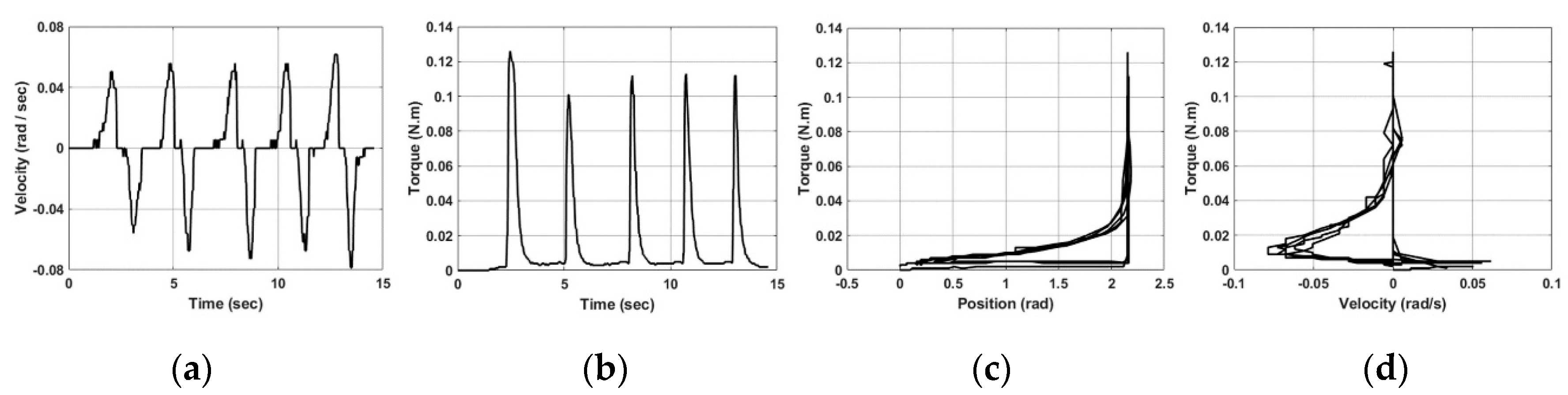
5.5. Virtual Wall Collision
6. Discussion
7. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Kim, S.-Y.; Yang, T.-H. Miniature impact actuator for haptic interaction with mobile devices. Int. J. Control Autom. Syst. 2014, 12, 1283–1288. [Google Scholar] [CrossRef]
- Derlukiewicz, D. Application of a Design and Construction Method Based on a Study of User Needs in the Prevention of Accidents Involving Operators of Demolition Robots. Appl. Sci. 2019, 9, 1500. [Google Scholar] [CrossRef]
- Woo, J.; Song, H.; Cha, H.-J.; Yi, B.-J. Advantage of Steerable Catheter and Haptic Feedback for a 5-DOF Vascular Intervention Robot System. Appl. Sci. 2019, 9, 4305. [Google Scholar] [CrossRef]
- Jinung, A.; Dong-soo, K. Haptic experimentation on a hybrid active/passive force feedback device. In Proceedings of the 2002 IEEE International Conference on Robotics and Automation, Washington, DC, USA, 10–17 May 2002; Volume 4, pp. 4217–4222. [Google Scholar]
- Bai, K.; Ji, J.; Lee, K.-M.; Zhang, S. A two-mode six-DOF motion system based on a ball-joint-like spherical motor for haptic applications. Comput. Math. Appl. 2012, 64, 978–987. [Google Scholar] [CrossRef]
- Goo, B. A Study on the Contact Pressure and Thermo-Elastic Behavior of a Brake Disc-Pad by Infrared Images and Finite Element Analysis. Appl. Sci. 2018, 8, 1639. [Google Scholar] [CrossRef]
- Berkelman, P.J.; Hollis, R.L. Lorentz Magnetic Levitation for Haptic Interaction: Device Design, Performance, and Integration with Physical Simulations. I. J. Robot. Res. 2000, 19, 644–667. [Google Scholar] [CrossRef]
- Gosline, A.; Hayward, V. Eddy Current Brakes for Haptic Interfaces: Design, Identification, and Control. IEEE/ASME Trans. Mechatron. 2008, 13, 669–677. [Google Scholar] [CrossRef]
- Bose, H.; Berkemeier, H.-J. Haptic Device Working with an Electrorheological Fluid. J. Intell. Mater. Syst. Struct. 1999, 10, 714–717. [Google Scholar] [CrossRef]
- Li, W.; Du, H. Design and Experimental Evaluation of a Magnetorheological Brake. Int. J. Adv. Manuf. Technol. 2003, 21, 508–515. [Google Scholar] [CrossRef]
- Shiao, Y.; Ngoc, N.; Lai, C.-H. Optimal design of a new multipole bilayer magnetorheological brake. Smart Mater. Struct. 2016, 25, 115015. [Google Scholar] [CrossRef]
- Wu, J.; Li, H.; Jiang, X.; Yao, J. Design, simulation and testing of a novel radial multi-pole multi-layer magnetorheological brake. Smart Mater. Struct. 2018, 27, 025016. [Google Scholar] [CrossRef]
- Zhang, P.; Dong, Y.; Choi, H.J.; Lee, C.-H. Tribological and rheological tests of core-shell typed carbonyl iron/polystyrene particle-based magnetorheological fluid. J. Ind. Eng. Chem. 2018, 68, 342–349. [Google Scholar] [CrossRef]
- International Standards of Medical Electrical Equipment, IEC 60601-1, 3rd ed.; International Electrotechnical Commission: Geneva, Switzerland, 2005.
- Electromagnetic Brakes. Available online: https://www.mikipulley.co.jp/EN/Products/ElectromagneticClutchesAndBrakes/ (accessed on 22 September 2019).
- Mekid, S. Spherical Joint with Internal Brake. U.S. Patent 8,608,398, 17 December 2013. [Google Scholar]
- Iqbal, H.; Yi, B.-J. A New Design of Spherical Electro-Magnetic Brake System. In Proceedings of the 2018 15th International Conference on Ubiquitous Robots (UR), Honolulu, HI, USA, 26–30 June 2018; pp. 220–222. [Google Scholar]
- McLyman, C.W.T. Transformer and Inductor Design Handbook, 3rd ed.; Marcel Dekker Inc.: Hoboken, NJ, USA, 2004; pp. 262–263. [Google Scholar]
- Schimpf, P.H. A Detailed Explanation of Solenoid Force. Int. J. Recent Trends Eng. Technol. 2013, 8, 8. [Google Scholar]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Design Variables | (deg) | (mm) | (mm) | (mm) | (mm) | (mm) | (mm) | |
| Initial values | 15 | 14 | 21.2 | 25.3 | 32.7 | 1.7 | 1.7 | 0.3 |
| Optimal values | 17 | 15 | 21 | 30 | 35 | 2.5 | 3.5 | 0.69 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Iqbal, H.; Yi, B.-J. Design of a New Bilayer Multipole Electromagnetic Brake System for a Haptic Interface. Appl. Sci. 2019, 9, 5394. https://doi.org/10.3390/app9245394
Iqbal H, Yi B-J. Design of a New Bilayer Multipole Electromagnetic Brake System for a Haptic Interface. Applied Sciences. 2019; 9(24):5394. https://doi.org/10.3390/app9245394
Chicago/Turabian StyleIqbal, Hashim, and Byung-Ju Yi. 2019. "Design of a New Bilayer Multipole Electromagnetic Brake System for a Haptic Interface" Applied Sciences 9, no. 24: 5394. https://doi.org/10.3390/app9245394
APA StyleIqbal, H., & Yi, B.-J. (2019). Design of a New Bilayer Multipole Electromagnetic Brake System for a Haptic Interface. Applied Sciences, 9(24), 5394. https://doi.org/10.3390/app9245394