Compensation of Frequency Drift in Frequency-Sweep Polarization-Modulation Ranging System

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:Featured Application
Abstract
1. Introduction
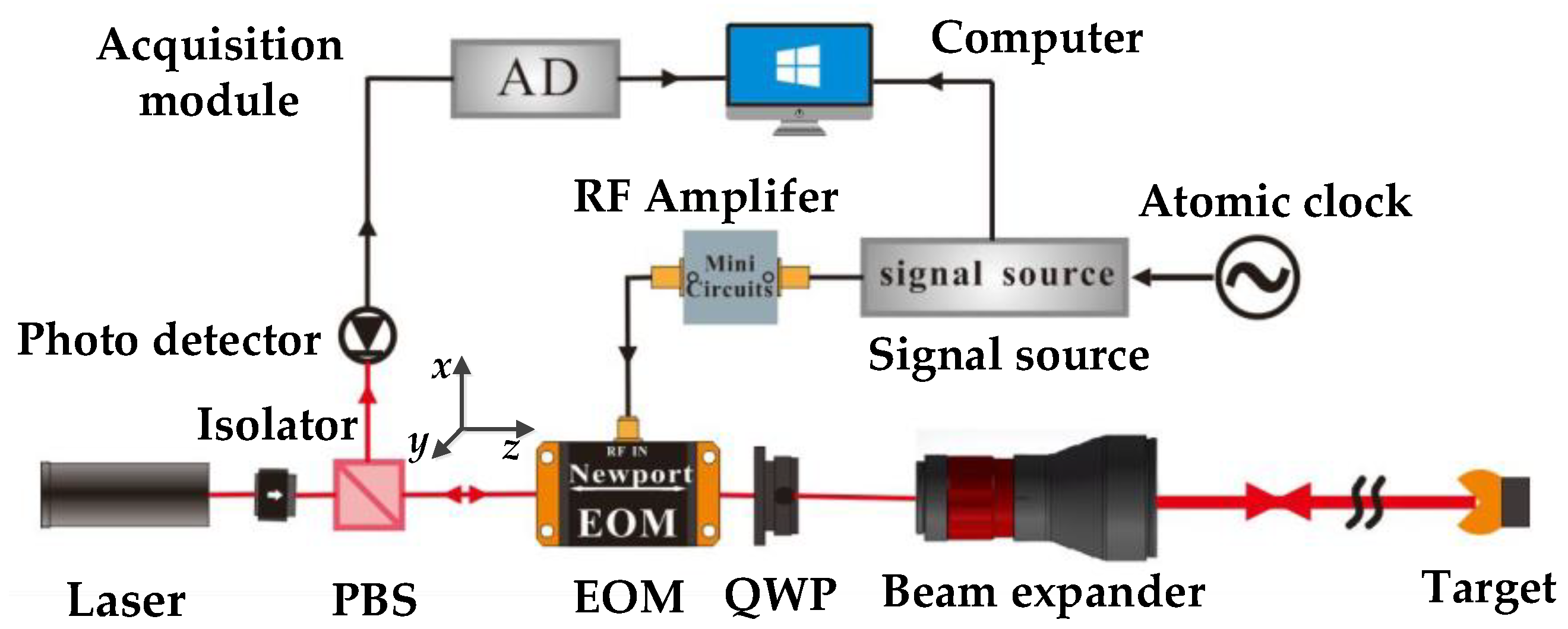
2. Principle and Method
2.1. The Principle and Model
2.2. Influence of Thermally Induced Phase Delay and Traditional Correction Method
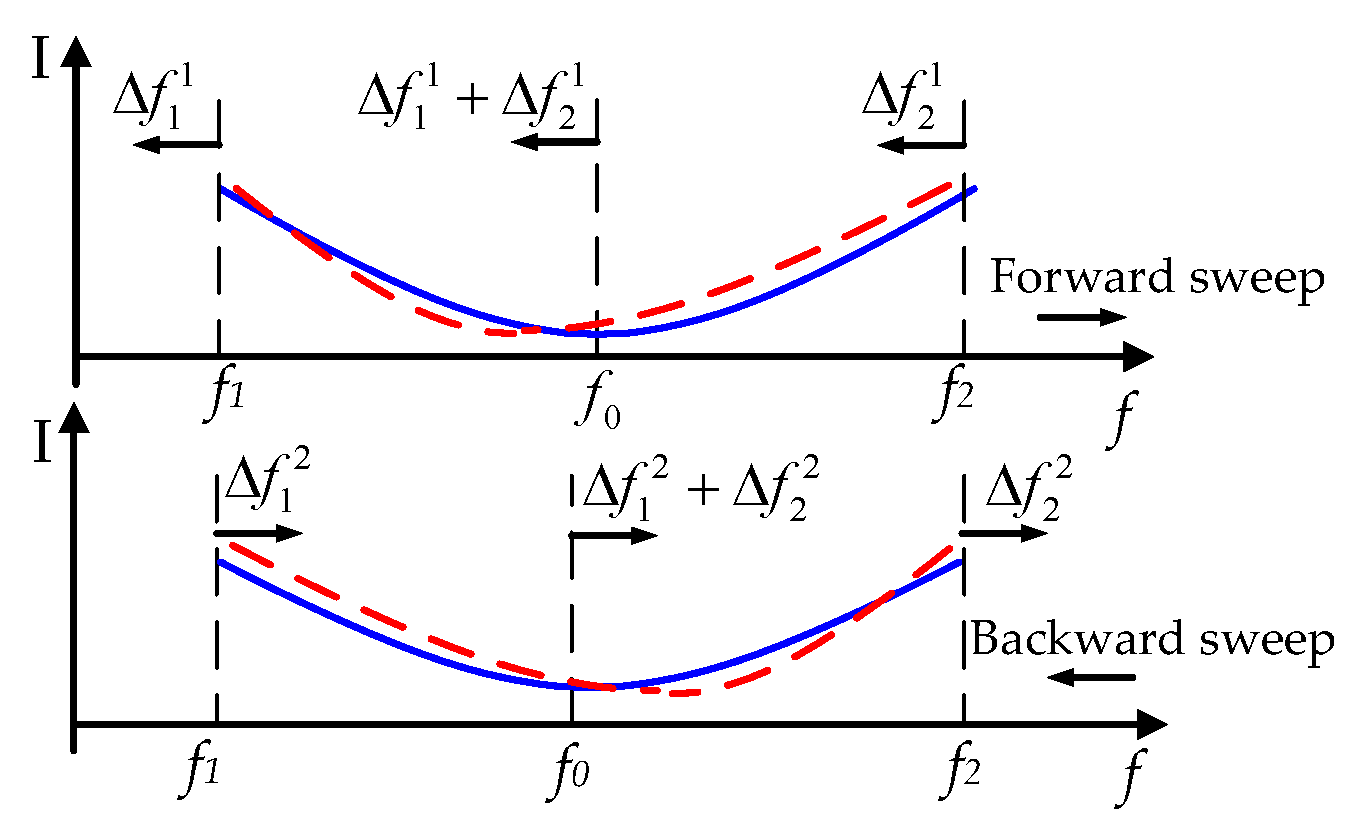
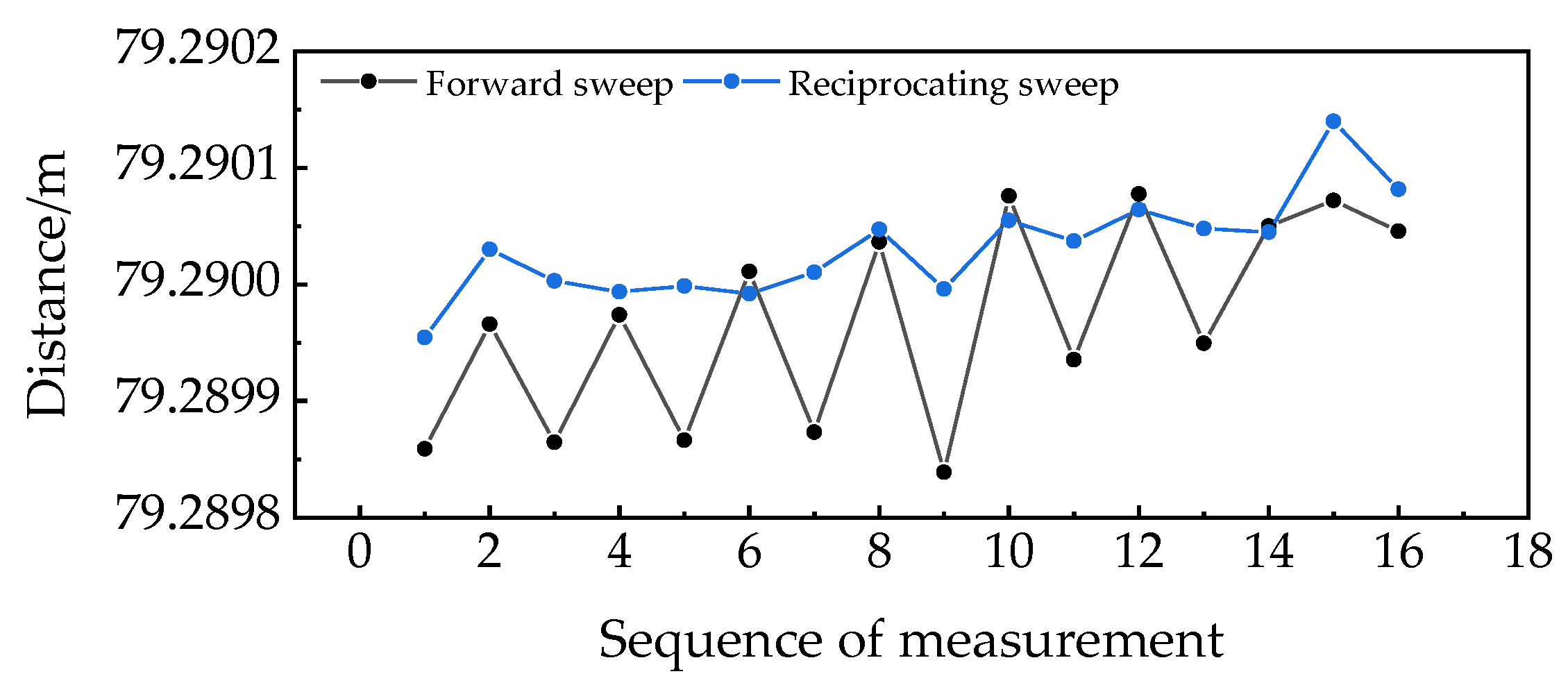
2.3. Reciprocating Sweeping-Based Measurement of “in Phase” Frequency
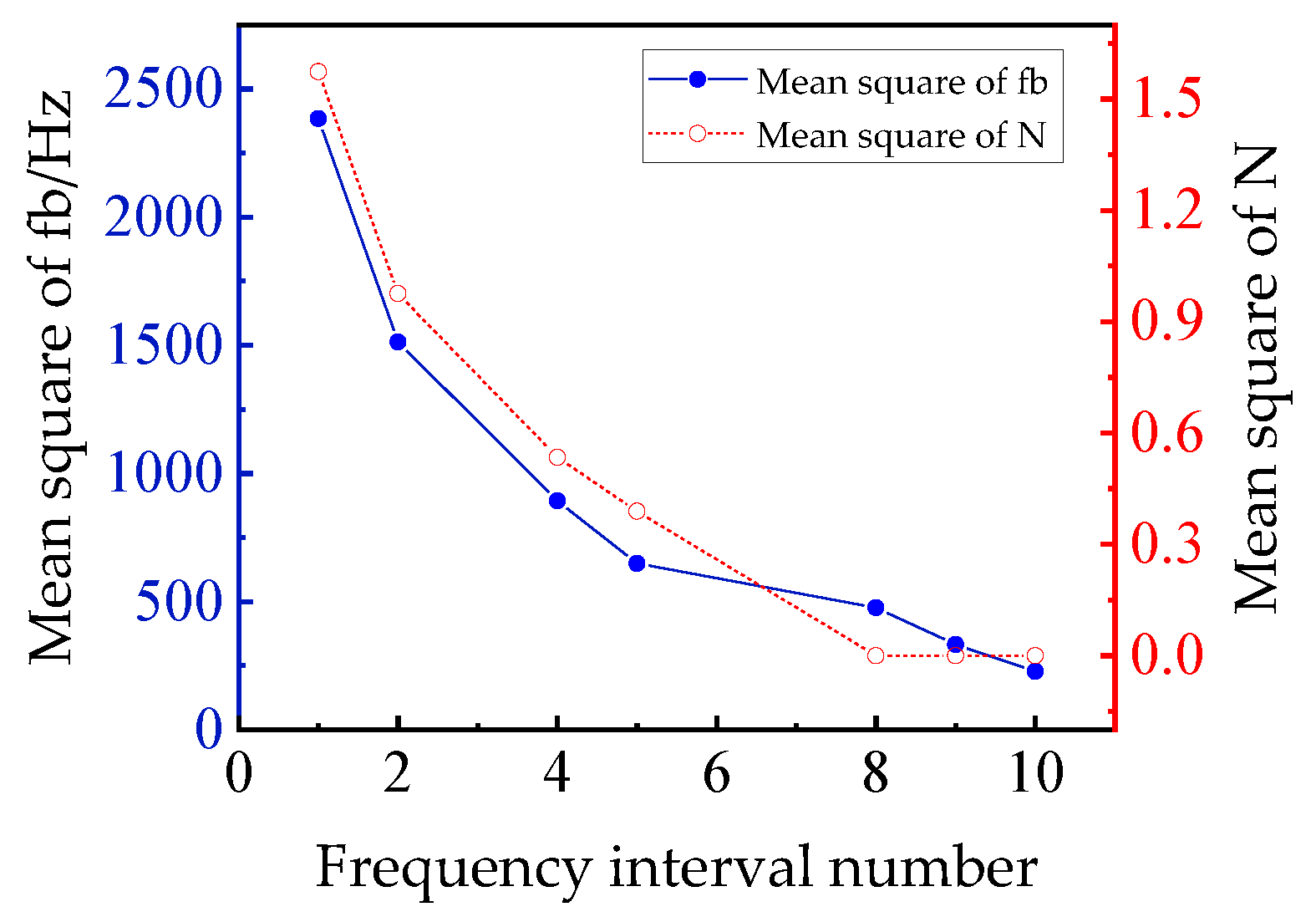
2.4. Multi-Frequency Interval-Based Measurement of Frequency Interval
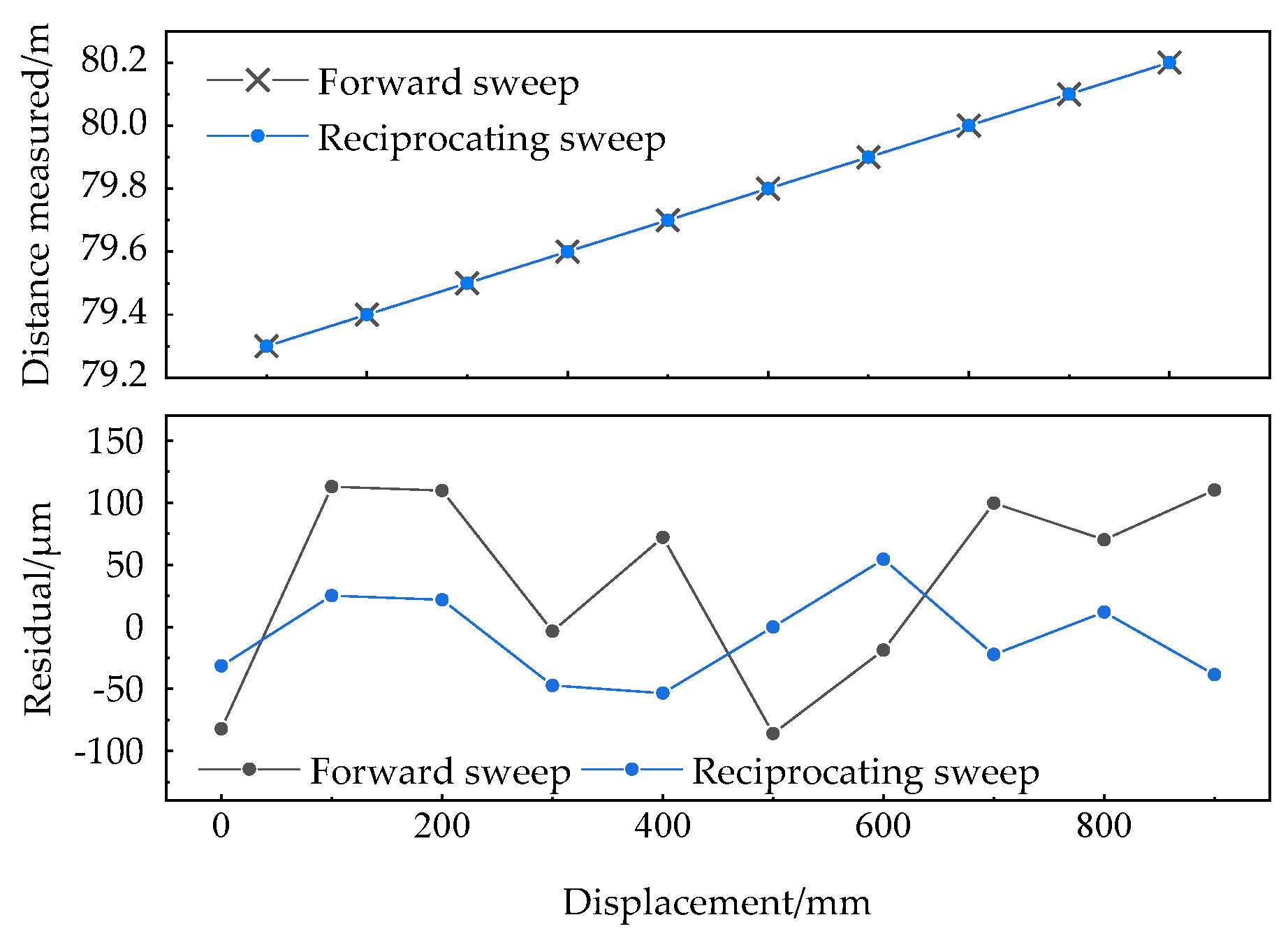
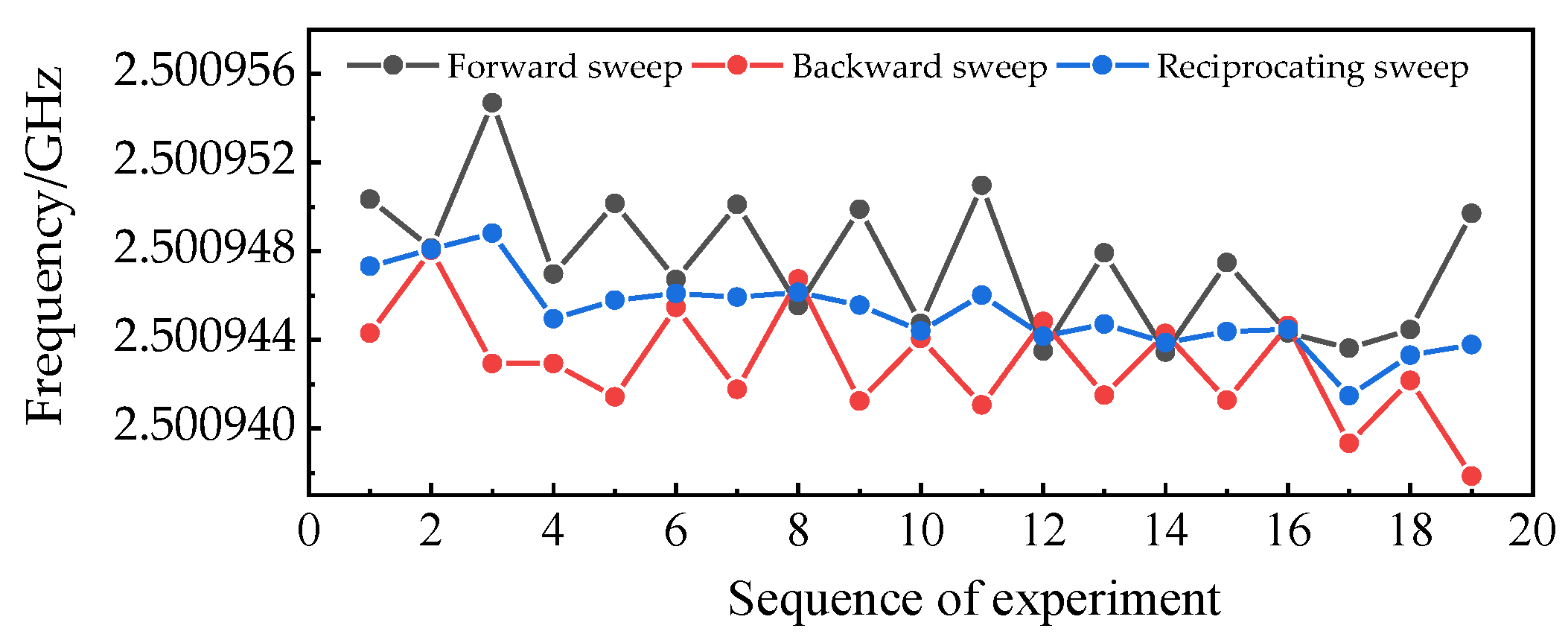
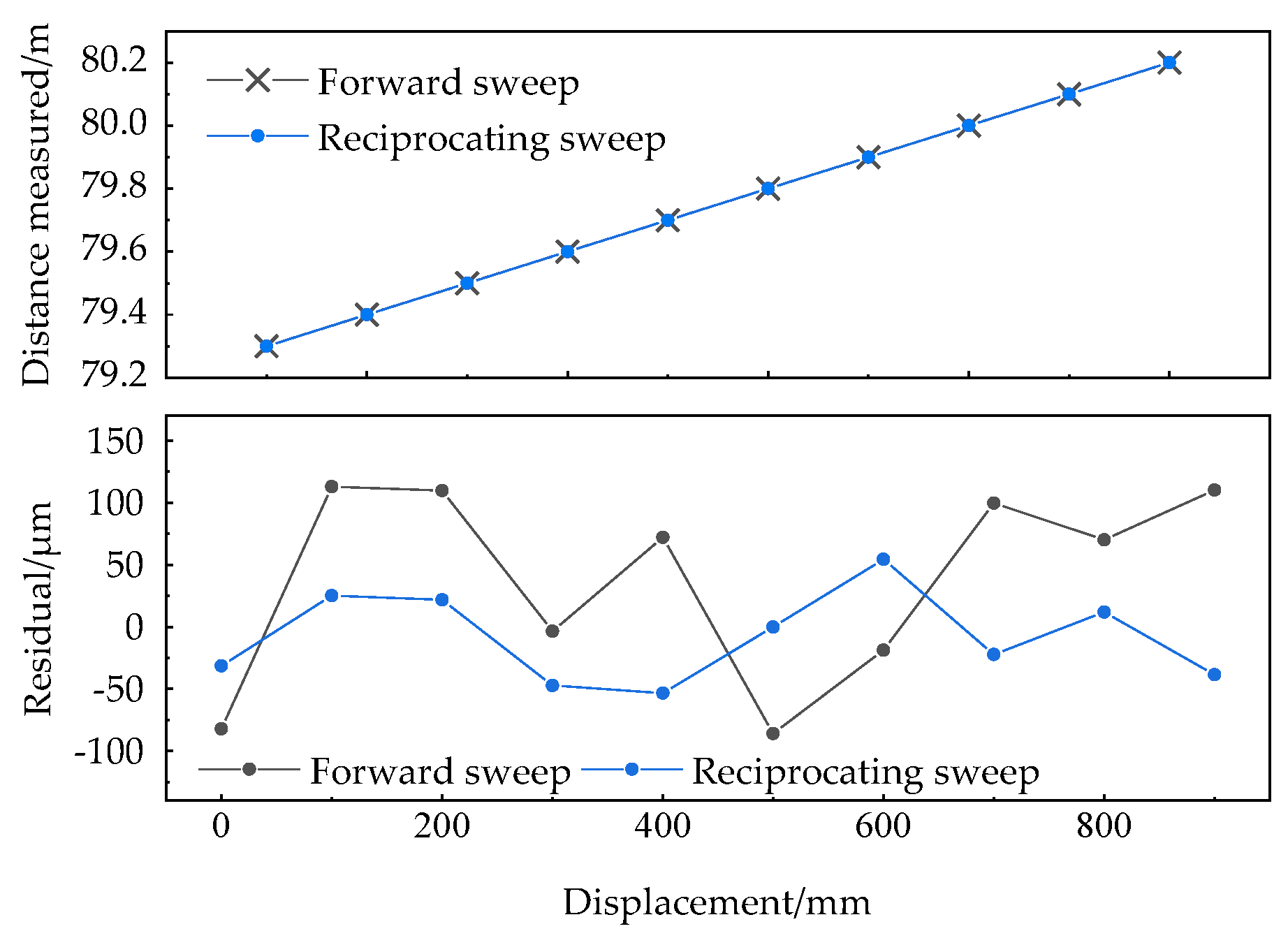
3. Experimental Results and Discussion
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Gao, W.; Kim, S.W.; Bosse, H.; Haitjema, H.; Chen, Y.L.; Lu, X.D.; Knapp, W.; Weckenmann, A.; Estler, W.T.; Kunzmann, H. Measurement technologies for precision positioning. Cirp Ann. Manuf. Technol. 2015, 64, 773–796. [Google Scholar] [CrossRef]
- Parker, D.H. Nondestructive testing and monitoring of stiff large-scale structures by measuring 3D coordinates of cardinal points using electronic distance measurements in a trilateration architecture. In Proceedings of the Nondestructive Characterization and Monitoring of Advanced Materials, Aerospace, and Civil Infrastructure, Portland, OR, USA, 26–29 March 2017. [Google Scholar]
- Golygin, N.K.; Lysenko, V.G.; Khizhnyakov, V.A. Metrological support for opto-electronic coordinate measurements. Meas. Tech. 2017, 59, 1073–1077. [Google Scholar] [CrossRef]
- Servagent, N.; Bosch, T.; Lescure, M. Design of a phase-shifting optical feedback interferometer using an electrooptic modulator. IEEE J. Sel. Top. Quantum Electron. 2000, 6, 798–802. [Google Scholar] [CrossRef]
- Fujima, I.; Iwasaki, S.; Seta, K. High-resolution distance meter using optical intensity modulation at 28 ghz. Bull. NRLM 1998, 48, 1049. [Google Scholar] [CrossRef]
- Castagnet, D.; Tap-Beteille, H.; Lescure, M. Avalanche-photodiode-based heterodyne optical head of a phase-shift laser range finder. Opt. Eng. 2006, 45, 828. [Google Scholar] [CrossRef]
- John, D.; Ben, H.; Andrew, J.L.; Andrew, J.L.; Armin, J.H.R.; Matthew, S.W. Multi-channel absolute distance measurement system with sub ppm-accuracy and 20 m range using frequency scanning interferometry and gas absorption cells. Opt. Express 2014, 22, 24869–24893. [Google Scholar]
- Xiong, X.-T.; Qu, X.-H.; Zhang, F.-M. Error correction for fsi-based system without cooperative target using an adaptive filtering method and a phase-matching mosaic algorithm. Appl. Sci. 2018, 8, 1954. [Google Scholar] [CrossRef]
- Medhat, M.; Sobee, M.; Hussein, H.M.; Terra, O. Distance measurement using frequency scanning interferometry with mode-hoped laser. Opt. Laser Technol. 2016, 80, 209–213. [Google Scholar] [CrossRef]
- Weimann, C.; Hoeller, F.; Schleitzer, Y.; Diez, C.A.; Spruck, B.; Freude, W.; Boeck, Y.; Koos, C. Measurement of length and position with frequency combs. J. Phys. Conf. Ser. 2015, 605, 012030. [Google Scholar] [CrossRef]
- Kim, S.-W.; Kim, Y.-J.; Hyun, S.; Chun, B.J.; Jang, Y.-S. Recent advances in absolute distance measurements using femtosecond light pulses. In Proceedings of the Ninth International Symposium on Precision Engineering Measurements and Instrumentation, Changsha, China, 8–10 August 2014. [Google Scholar]
- Tan, J.; Yang, H.; Hu, P.; Diao, X. Identification and elimination of half-synthetic wavelength error for multi-wavelength long absolute distance measurement. Meas. Sci. Technol. 2011, 22, 115301. [Google Scholar] [CrossRef]
- Meiners-Hagen, K.; Schödel, R.; Pollinger, F.; Abou-Zeid, A. Multi-wavelength interferometry for length measurements using diode lasers. Meas. Sci. Rev. 2009, 9, 16–26. [Google Scholar] [CrossRef]
- Sa, V.D.B.; Persijn, S.T.; Kok, G.J.; Zeitouny, M.G.; Bhattacharya, N. Many-wavelength interferometry with thousands of lasers for absolute distance measurement. Phys. Rev. Lett. 2012, 108, 183901. [Google Scholar]
- Ji, R.; Hu, K.; Li, Y.; Gao, S.; Zhou, W. Study of femtosecond laser spectrally resolved interferometry distance measurement based on excess fraction method. In Proceedings of the Second International Conference on Photonics and Optical Engineering, Xi’an, China, 14–17 October 2017. [Google Scholar]
- Li, Y.; Shi, J.; Wang, Y.; Ji, R.; Liu, D.; Zhou, W. Phase distortion correction in dual-comb ranging system. Meas. Sci. Technol. 2017, 28, 075201. [Google Scholar] [CrossRef]
- Zhou, W.; Shi, J.; Ji, R.; Li, Y.; Liu, Y. High-precision distance measurement using femtosecond laser frequency comb. Chin. J. Sci. Instrum. 2017. [Google Scholar]
- Gao, S.; Ji, R.; Li, Y.; Cheng, Z.; Zhou, W. Experiments and error analysis of laser ranging based on frequency-sweep polarization modulation. Proc. SPIE 2016, 23, 1002322. [Google Scholar]
- Hei, K.F.; Yu, J.L.; Wang, J.; Wang, W.R.; Jia, S.; Wu, Q.; Xue, J.Q. Variable frequency range finding technology based on double polarization modulation method and system implementation. Acta Phys. Sin. 2014, 63, 100602. [Google Scholar]
- Xiao, Y.; Wang, J.; Wang, W.-R.; Wang, Z.-X.; Xie, T.-Y.; Yu, Y.; Xue, J.-Q. Relationship between modulation frequency and range accuracy in the double polarization modulation range finding system. Acta Phys. Sin. 2016, 65, 601. [Google Scholar]
- Meier, D. Electro-Optical Measuring Device for Absolute Distances. U.S. Patent Application No. 5764360, 9 June 1998. [Google Scholar]
- Meier, D. Method and Measuring Device for Measuring an Absolute Distance. U.S. Patent Application No. 7609387, 10 April 1990. [Google Scholar]
- Meier, D. Electrooptical Distance Measuring Apparatus. U.S. Patent Application No. 4759623, 20 April 1988. [Google Scholar]
- Sima, W.; Liu, T.; Yang, Q.; Han, R.; Sun, S. Temperature characteristics of pockels electro-optic voltage sensor with double crystal compensation. AIP Adv. 2016, 6, 055109. [Google Scholar] [CrossRef]
- Wong, K.K. Properties of Lithium Niobate; IET: London, UK, 2002. [Google Scholar]
- Zaky, S.G. Optical Modulator Having Compensation for Thermal and Space Charge Effects. U.S. Patent Application No. 3900247, 19 August 1975. [Google Scholar]
- Sabatke, D.; Handorf, R.V.; Sullivan, J. Polarization and fold mirrors in application of the leica absolute distance meter. Proc SPIE 2009, 7461, 485–560. [Google Scholar]
- Luethi, T.; Meier, D. Electro-Optical Distance-Measuring Unit. U.S. Patent Application No. 8289524, 6 November 2012. [Google Scholar]

© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gao, S.; Ji, R.; Li, Y.; Liu, C.; Shi, J.; Pan, Y.; Zhou, W. Compensation of Frequency Drift in Frequency-Sweep Polarization-Modulation Ranging System. Appl. Sci. 2019, 9, 1243. https://doi.org/10.3390/app9061243
Gao S, Ji R, Li Y, Liu C, Shi J, Pan Y, Zhou W. Compensation of Frequency Drift in Frequency-Sweep Polarization-Modulation Ranging System. Applied Sciences. 2019; 9(6):1243. https://doi.org/10.3390/app9061243
Chicago/Turabian StyleGao, Shuyuan, Rongyi Ji, Yao Li, Chun Liu, Junkai Shi, Yingling Pan, and Weihu Zhou. 2019. "Compensation of Frequency Drift in Frequency-Sweep Polarization-Modulation Ranging System" Applied Sciences 9, no. 6: 1243. https://doi.org/10.3390/app9061243
APA StyleGao, S., Ji, R., Li, Y., Liu, C., Shi, J., Pan, Y., & Zhou, W. (2019). Compensation of Frequency Drift in Frequency-Sweep Polarization-Modulation Ranging System. Applied Sciences, 9(6), 1243. https://doi.org/10.3390/app9061243