The Importance of Assessing the Level of Service in Confined Infrastructures: Some Considerations of the Old Ottoman Pedestrian Bridge of Mostar





Abstract
:1. Introduction
2. State of the Art
2.1. Level of Service LOS Definition
2.2. Case Study Details
3. Methodology
3.1. Social Force Model Development
3.2. Microsimulation Approach
3.3. Calibration Procedures
- “default” setting used in the 2nd scenario;
- “normal” setting, assigned to the 1st-3rd-5th-6th scenarios respectively;
- “evacuation” setting applied in the 4th scenario.
4. Results and Discussion
Author Contributions
Funding
Conflicts of Interest
References
- Helbing, D.; Molnar, P. Social force model for pedestrian dynamics. Phys. Rev. E 1995, 51, 4282. [Google Scholar] [CrossRef]
- Helbing, D.; Buzna, L.; Johansson, A.; Werner, T. Self-organized pedestrian crowd dynamics: Experiments, simulations, and design solutions. Transp. Sci. 2005, 39, 1–24. [Google Scholar] [CrossRef]
- Zanlungo, F.; Ikeda, T.; Kanda, T. Social force model with explicit collision prediction. Europhys. Lett. 2011, 93, 68005. [Google Scholar] [CrossRef]
- Helbing, D.; Farkas, I.; Vicsek, T. Simulating dynamical features of escape panic. Nature 2000, 407, 487. [Google Scholar] [CrossRef]
- Carroll, P.S.; Owen, S.J.; Hussein, F.M.M. Modelling crowd–bridge dynamic interaction with a discretely defined crowd. J. Sound Vib. 2012, 331, 2685–2709. [Google Scholar] [CrossRef]
- Jiménez-Alonso, F.J.; Sáez, A.; Caetano, E.; Magalhães, F. Vertical crowd–structure interaction model to analyze the change of the modal properties of a footbridge. J. Bridg. Eng. 2016, 21, C4015004. [Google Scholar] [CrossRef]
- Basbas, S.; Nikiforiadis, A.; Sarafianou, E.; Kolonas, N. Behavior and Perceptions of University Students at Pedestrian Crossings. In Proceedings of the 4th Conference on Sustainable Urban Mobility, Skiathos Island, Greece, 24–25 May 2018; pp. 280–287. [Google Scholar]
- Collotta, M.; Pau, G.; Scatà, G.; Campisi, T. A dynamic traffic light management system based on wireless sensor networks for the reduction of the red-light running phenomenon. Transp. Telecommun. 2014, 15, 1–11. [Google Scholar] [CrossRef] [Green Version]
- Zakaria, J.; Ujang, N. Comfort of walking in the city center of Kuala Lumpur. Procedia Soc. Behav. Sci. 2015, 170, 642–652. [Google Scholar] [CrossRef]
- Antonini, G.; Bierlaire, M.; Weber, M. Discrete choice models of pedestrian walking behavior. Transp. Res. Part B Methodol. 2006, 40, 667–687. [Google Scholar] [CrossRef]
- Kormanová, A. A review on macroscopic pedestrian flow modelling. Acta Inf. Pragensia 2014, 2, 39–50. [Google Scholar] [CrossRef]
- Varas, A.; Cornejo, M.D.; Mainemer, D.; Toledo, B.; Rogan, J.; Munoz, V.; Valdivia, J.A. Cellular automaton model for evacuation process with obstacles. Phys. A Stat. Mech. Appl. 2007, 382, 631–642. [Google Scholar] [CrossRef] [Green Version]
- Okazaki, S. A study of pedestrian movement in architectural space, part 1: Pedestrian movement by the application on of magnetic models. Trans. AIJ 1979, 283, 111–119. [Google Scholar]
- Kretz, T.; Mayer, G.; Mühlberger, A. Behaviour and perception-based pedestrian evacuation simulation. In Pedestrian and Evacuation Dynamics; Springer: Boston, MA, USA, 2011; pp. 827–831. [Google Scholar]
- Helbing, D.; Molnár, P.; Farkas, J.I.; Bolay, K. Self-organizing pedestrian movement. Environ. Plan. B Plan. Des. 2001, 28, 361–383. [Google Scholar] [CrossRef]
- Kadali, R.B.; Vedagiri, P. Review of the pedestrian level of service: Perspective in developing countries. Transp. Res. Rec. J. Transp. Res. Board 2016, 2581, 37–47. [Google Scholar] [CrossRef]
- Fruin, J.J. Designing for Pedestrians: A Level-of-Service Concept; Public Transportation United States: Washington, DC, USA, 1992. [Google Scholar]
- Môri, M.; Tsukaguchi, H. A New Method for Evaluation of Level of Service in Pedestrian Facilities. Transp. Res. Part A 1987, 21, 223–234. [Google Scholar] [CrossRef]
- Sarkar, S. Determination of Service Levels for Pedestrians, with European Examples. Transp. Res. Rec. 1993, 1405, 35–42. [Google Scholar]
- Khisty, J.C. Evaluation of Pedestrian Facilities: Beyond the Levelof- Service Concept. Transp. Res. Rec. 1994, 1438, 45–50. [Google Scholar]
- Manual, H.C. Highway Capacity Manual; Transportation Research Board: Washington, DC, USA, 2000. [Google Scholar]
- Landis, B.; Vattikuti, V.; Ottenberg, R.; McLeod, D.; Guttenplan, M. Modeling the Roadside Walking Environment: Pedestrian LOS. Transp. Res. Rec. 2001, 1773, 82–88. [Google Scholar] [CrossRef]
- Muraleetharan, T.; Adachi, T.; Hagiwara, T.; Kagaya, S. Method to Determine Pedestrian Level-of-Service for Crosswalks at Urban Intersections. J. East. Asia Soc. Transp. Stud. 2005, 6, 127–136. [Google Scholar]
- Hummer, J.; Rouphail, N.; Hughes, R.G.; Fain, S.J.; Toole, J.L.; Patten, R.S.; Schneider, R.J.; Monahan, J.F.; Do, A. User Perceptions of the Quality of Service on Shared Paths. Transp. Res. Rec. 2005, 1939, 28–36. [Google Scholar] [CrossRef] [Green Version]
- Petritsch, A.T.; Landis, B.W.; McLeod, P.S.; Huang, H.F.; Challa, S.; Guttenplan, M. Level-of-Service Model for Pedestrians at Signalized Intersections. Transp. Res. Rec. J. Transp. Res. Board 2005, 1939, 55–62. [Google Scholar] [CrossRef]
- Bian, Y.; Wang, W.; Lu, J.; Junlai, M.; Dandan, T. Pedestrian Level of Service for Sidewalks in China. In Proceedings of the 86th Annual Meeting of Transportation Research Board, Washington, DC, USA, 21–25 January 2007. [Google Scholar]
- Dandan, T.; Wei, W.; Jian, L.; Yang, B. Research on Methods of Assessing Pedestrian Level of Service for Sidewalks. J. Transp. Syst. Eng. Inf. Technol. 2007, 7, 74–79. [Google Scholar]
- Parida, P.; Parida, M. Modelling Qualitative Level of Service for Sidewalks in Delhi. In Proceedings of the International Conference on the Best Practices to Relieve Congestion on Mixed-Traffic Urban Streets in Developing Countries, Chennai, India, 12–14 September 2008; pp. 295–304. [Google Scholar]
- Jayaprakash, P.O.; Gunasekaran, K. Application of TRB model for evaluation of pedestrian LOS under Indian conditions. In Proceedings of the International Conference on the Best Practices to Relieve Congestion on Mixed-Traffic Urban Streets in Developing Countries, Chennai, India, 12–14 September 2008; pp. 287–293. [Google Scholar]
- Kotkar, L.K.; Rastogi, R.; Chandra, S. Pedestrian flow characteristics in mixed flow conditions. J. Urban Plan. Dev. 2010, 136, 23–33. [Google Scholar]
- Rastogi, R.; Chandra, S.; Mohan, M. Development of level of service criteria for pedestrians. J. Indian Roads Congr. 2014, 75, 61–70. [Google Scholar]
- Cepolina, M.E.; Menichini, F.; Rojas, G.P. Level of service of pedestrian facilities: Modelling human comfort perception in the evaluation of pedestrian behaviour patterns. Transp. Res. Part F Traffic Psychol. 2018, 58, 365–381. [Google Scholar] [CrossRef]
- Gorrini, A.; Vizzari, G.; Bandini, S. Age and group-driven pedestrian behaviour: From observations to simulations. Collect. Dyn. 2016, 1, 1–16. [Google Scholar] [CrossRef]
- Gorrini, A.; Bandini, S.; Vizzari, G. Empirical investigation on pedestrian crowd dynamics and grouping. Traffic Granul. Flow 2015, 13, 83–91. [Google Scholar]
- Fruin, J.J. Pedestrian Planning and Design; Metropolitan Association of Urban Designers and Environmental Planners: New York, NY, USA, 1971. [Google Scholar]
- Seneviratne, N.P.; Morrall, F.J. Level of service on pedestrian facilities. Transp. Q. 1985, 39, 109–123. [Google Scholar]
- National Research Council. Highway Capacity Manual (HCM 2010); Transportation Research Board: Washington, DC, USA, 2010. [Google Scholar]
- Itami, M.R. Estimating Capacities for Pedestrian Walkways and Viewing Platforms; A Report to Parks Victoria; Parks Victoria: Melbourne, Australia, 13 June 2002. [Google Scholar]
- Zegeer, V.C. Pedestrian Facilities Users Guide: Providing Safety and Mobility; US Department of Transportation, Federal Highway Administration (FHWA): McLean, VA, USA, 2002.
- PTV Group. PTV Viswalk; PTV Group: Karlsruhe, Germany, 2011. [Google Scholar]
- Allen, P.D.; Rouphail, N.; Hummer, J.; Milazzo, J. Operational analysis of uninterrupted bicycle facilities. Transp. Res. Rec. J. Transp. Res. Board 1998, 1636, 29–36. [Google Scholar] [CrossRef]
- Milazzo, J.S., II; Rouphail, N.M.; Hummer, J.E.; Allen, D.P. Quality of service for interrupted-flow pedestrian facilities in highway capacity manual 2000. Transp. Res. Rec. J. Transp. Res. Board 1999, 1678, 25–31. [Google Scholar] [CrossRef]
- Forde, S. The bridge on the Neretva: Stari Most as a stage of memory in post-conflict Mostar, Bosnia–Herzegovina. Coop. Confl. 2016, 51, 467–483. [Google Scholar] [CrossRef]
- Buchmueller, S.; Weidmann, U. Parameters of Pedestrians, Pedestrian Traffic and Walking Facilities. IVT Schriftenreihe 2006, 132. [Google Scholar] [CrossRef]
- PTV Group. PTV Vissim 9.0 User Manual; PTV Group: Karlsruhe, Germany, 2014. [Google Scholar]
- Giuffrè, O.; Granà, A.; Giuffrè, T.; Marino, R.; Campisi, T. An Italian experience on crash modelling for roundabouts. J. Eng. Appl. Sci. 2015, 10, 2471–2478. [Google Scholar]
- Pau, G.; Campisi, T.; Canale, A.; Severino, A.; Collotta, M.; Tesoriere, G. Smart Pedestrian Crossing Management at Traffic Light Junctions through a Fuzzy-Based Approach. Future Internet 2018, 10, 15. [Google Scholar] [Green Version]
- Campisi, T.; Tesoriere, G.; Canale, A. Microsimulation approach for BRT system: The case study of urban turbo-roundabout. AIP Conf. Proc. 2017, 1906, 190005. [Google Scholar]
- Tollazzi, T.; Tesoriere, G.; Guerrieri, M.; Campisi, T. Environmental, functional and economic criteria for comparing “target roundabouts” with one-or two-level roundabout intersections. Transp. Res. Part D Transp. Environ. 2015, 34, 330–344. [Google Scholar] [CrossRef]
- Otković, I.I.; Tollazzi, T.; Šraml, M. Analysis of the influence of car-following input parameters on the modelled travelling time. Tehničkivjesnik Znanstveno-Stručničasopistehničkih Fakulteta Sveučilišta u Osijeku 2013, 20, 919–925. [Google Scholar]
- Helbing, D.; Farkas, J.I.; Molnar, P.; Vicsek, T. Simulation of pedestrian crowds in normal and evacuation situations. Pedestr. Evac. Dyn. 2002, 21, 21–58. [Google Scholar]
- Kadali, B.R.; Vedagiri, P. Modelling pedestrian road crossing behaviour under mixed traffic condition. Eur. Transp. 2013, 55, 1–17. [Google Scholar]
- Johansson, A.; Helbing, D.; Shukla, P. Specification of the Social Force Pedestrian Model by Evolutionary Adjustment to Video Tracking Data. Adv. Complex Syst. 2007, 10, 271–288. [Google Scholar] [CrossRef]
- Kretz, T. On oscillations in the social force model. Phys. A Stat. Mech. Appl. 2015, 438, 272–285. [Google Scholar] [CrossRef]
- Korhonen, T. Technical Reference and User’s Guide for Fire Dynamics Simulator with Evacuation; VTT Technical Research Center of Finland: Espoo, Finland, 2017. [Google Scholar]
- Jobanputra, R.; Vanderschuren, M. The Development and Calibration of an Agent-Based Microsimulation Model for Vehicle-Pedestrian Interaction. In Pedestrian and Evacuation Dynamics; Springer: Cham, Switzerland, 2014; pp. 1001–1011. [Google Scholar]
- Hoogendoorn, P.S.; Daamen, W.; Bovy, H.P. Extracting microscopic pedestrian characteristics from video data. In Proceedings of the Transportation Research Board Annual Meeting, Washington, DC, USA, 12–16 January 2003; Volume 9, pp. 1–15. [Google Scholar]
- Li, S.; Sayed, T.; Zaki, M.H.; Mori, G.; Stefanus, F.; Khanloo, B.; Saunier, N. Automated collection of pedestrian data through computer vision techniques. Transp. Res. Rec. 2012, 2299, 121–127. [Google Scholar] [CrossRef]
- Boltes, M.; Seyfried, A.; Steffen, B.; Schadschneider, A. Automatic Extraction of Pedestrian Trajectories from Video Recordings. Pedestr. Evac. Dyn. 2008, 2010, 43–54. [Google Scholar]
- Laureshyn, A. Application of Automated Video Analysis to Road User Behavior; Departmentof Technology and Society, Faculty of Engineering, LTH, Lund University: Lund, Sweden, 2010. [Google Scholar]
- Laureshyn, A. T-Analyst Software. 2013. Available online: http://www.tft.lth.se/video/cooperation/software (accessed on 1 January 2019).
- Studenski, S.; Perera, S.; Patel, K.; Rosano, C.; Faulkner, K.; Inzitari, M.; Brach, J.; Chandler, J.; Cawthon, P.; Connor, E.B.; et al. Gait speed and survival in older adults. JAMA 2011, 305, 50–58. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Period | Author | Parameters Correlated with LOS |
|---|---|---|
| 1971 | Fruin [17] | Human convenience and the design of environment. |
| 1987 | Mori and Tsukaguchi [18] | Pedestrian flow, speed and density relationship, and their overtaking maneuvers. |
| 1993 | Sarkar [19] | Qualitative measures like safety, security, comfort and convenience, continuity, system coherence and attractiveness. |
| 1994 | Khisty [20] | Contribution of environmental factors towards service levels of pedestrians’ facilities by adopting suitable performance measures. |
| 2000 | HCM manual [21] | Analysis of pedestrian flow on sidewalks, crosswalks and street corners mainly derived from John Fruin’s research. |
| 2001 | Landis et al. [22] | Pedestrian perceptions of the quality of service. |
| 2004 | Muraleetharan et al. [23] | Total utility value of a facility based on sidewalk width and separation, obstructions, flow rate andbicycleevents. |
| 2005 | Hummer et al. [24] | Path operations and found that the path width, the number of meeting and passing events and the presence of a center line are the key variables in determining in pedestrianperception |
| 2006 | Petritsch et al. [25] | Traffic volume, sidewalk’s adjacent roadway width and the density of conflict points |
| 2007 | Bian et al. [26] | A sidewalk intercept survey to measure pedestrian perceptions of sidewalk LOS and relative changing value |
| Dandan et al. [27] | Relationship between pedestrians’ subjective perceptions, the quality of physical facilities and the traffic flow operation | |
| 2008 | Parida and Parida [28] | LOS related to the physical parameters like sidewalk width, sidewalk surface, obstruction, encroachment, potential of vehicular conflict and continuity |
| Jayaprakash and Gunasekharan [29] | They found that the Lendis model overestimates the pedestrian LOS as compared to the HCM (2000) model | |
| 2010 | Kotkar et al. [30] | They consider the pedestrian movements along the carriageway (on or at side) and on a pedestrian facility |
| 2014 | Rastogi, et al. [31] | Pedestrian movements along the carriageway (on or at side) and on a pedestrian facility |
| 2018 | Cepolina et al. [32] | Modeling human comfort perception in the evaluation of pedestrian behavior patterns |
| Level of Service LOS | ||||||
|---|---|---|---|---|---|---|
| A | B | C | D | E | F | |
| Period (1971) | FRUIN | |||||
| space (m2/ped) | >3.20 | 2.3–3.2 | 1.4–2.3 | 0.9–1.4 | 0.5–0.9 | <0.5 |
| flow rate (ped/min/m) | <23 | 23–33 | 33–49 | 49–66 | 66–82 | variable |
| Period (2000) | HCM | |||||
| space (m2/ped) | <4.80 | 3.54–4.8 | 1.74–3.54 | 1.14–1.74 | 0.59–1.14 | <0.59 |
| flow rate (ped/min/m) | <16 | 16–23 | 23–33 | 33–49 | 49–75 | variable |
| Fruin Walkway LOS | ||||||
|---|---|---|---|---|---|---|
| Ped/m/min | Ped/min/m | Ped/m2 | Side Size (m) | Flow Condition |  | |
| A | <23 | <7 | 0.08 | 1.93–1.80 | Free flow | |
| B | 23.0–32.8 | 7–23 | 0.08–0.27 | 1.80–1.67 | Minor conflicts | |
| C | 32.8–48.2 | 23–33 | 0.27–0.45 | 1.67–1.52 | Slower speed | |
| D | 48.2–65.6 | 33–49 | 0.45–0.69 | 1.52–1.36 | Restricted most | |
| E | 65.6–82 | 49–82 | 0.69–1.66 | 1.36–1.18 | Restricted all | |
| F | >82 | >82 | >1.66 | 0.95–0.68 | Shuffling | |
| LOS | Stairs | Waiting Area | ||||
|---|---|---|---|---|---|---|
| Space (m2/ped) | Flow Rate (ped/min/m) | Average Speed Horiz. (m/min) | Average Speed Horiz. (m/s) | Space (m2/ped) | Interspacing Area (m) | |
| A | 1.9 | 16 | 32 | 0.53 | >1.21 | 1.2 |
| B | 1.6–1.9 | 16–20 | 32 | 0.53 | 0.93–1.21 | 0.9–1.2 |
| C | 1.1–1.6 | 20–26 | 29–32 | 0.48 | 0.65–0.93 | 0.7–0.9 |
| D | 0.7–1.1 | 26–36 | 25–29 | 0.42 | 0.27–0.65 | 0.3–0.7 |
| E | 0.5–0.7 | 36–49 | 24–25 | 0.4 | 0.19–0.27 | <0.3 |
| F | <0.5 | Var. | <24 | <0.40 | <0.19 | Negligible |
| Scenario | Ramp | Flow (ped/h) | Flow Condition | Vissim Pedestrian Modes |
|---|---|---|---|---|
| 1st |  | 1500 | Daily | Normal |
| 2nd | 3000 | Max | Default | |
| 3rd | 3000 | Max | Normal | |
| 4th |  | 1650 | Evacuation | Evacuation |
| 5th |  | 1500 | Maintenance | Normal |
| 6th | 3000 | Maintenance | Normal | |
| 7th |  | 1650 | Maintenance + Evacuation | Evacuation |
| Viswalk Parameters | Default | Normal | Evacuation |
|---|---|---|---|
| tau (τ) | 0.40 | 0.06 | 0.06 |
| react_to_n parameter | 8 | 4 | 2 |
| ASocIso BSocIso | 2.72 0.20 | 1 0.10 | 1 0.10 |
| Lambda (λ) | 0.176 | 0.176 | 0.176 |
| ASocMean | 0.40 | 0.40 | 0.40 |
| BSocMean | 2.80 | 2.80 | 2.80 |
| VD | 3 | 9 | 6 |
| Noise | 1.2 | 1.2 | 2.4 |
| PrefLato | nothing | nothing | nothing |
| LOS | Density (ped/m2) | Space (m2/ped) | Flow Rate (ped/min/m) | Av. Speed (m/s) | Capacity v/c Ratio |
|---|---|---|---|---|---|
| A | ≤0.27 | ≥3.24 | ≤23 | ≤1.3 | 0–0.3 |
| B | 0.43–0.31 | 2.32–3.24 | 23–33 | 1.27 | 0.3–0.4 |
| C | 0.72–0.43 | 1.39–2.32 | 33–49 | 1.22 | 0.4–0.6 |
| D | 1.08–0.72 | 0.9–1.39 | 49–66 | 1.14 | 0.6–0.8 |
| E | 2.17–1.08 | 0.46–0.93 | 66–82 | 0.76 | 0.8–1.0 |
| F | >2.17 | ≤0.46 | variable | ≤0.76 | variable |
| LOS | Max RAMP Speed (km/h) | Max AREA Speed (km/h) | Colour |
|---|---|---|---|
| A | >2.7 | >2.153 | |
| B | 2.7 | 2.153 | |
| C | 1.53 | 1.076 | |
| D | 1.076 | 0.718 | |
| E | 0.718 | 0.431 | |
| F | 0.538 | 0.308 |
| Case Study | LOS Layout | Pedestrian Flow | LOS AREA | LOS RAMP |
|---|---|---|---|---|
| 1ST SCENARIO | 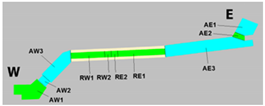 | 1.500 ped/h DAILY CONDITION | AW1 = LOS B AW2 = LOS C AW3 = LOS B AE1 = LOS B AE2 = LOS C AE3 = LOS B | RW1 = LOS C RW2 = LOS C RE1 = LOS C RE2 = LOS C |
| 2ND SCENARIO |  | 3.000 ped/h DAILY CONDITION | AW1 = LOS F AW2 = LOS F AW3 = LOS F AE1 = LOS F AE2 = LOS F AE3 = LOS F | RW1 = LOS F RW2 = LOS F RE1 = LOS F RE2 = LOS F |
| 3RD SCENARIO | 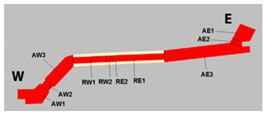 | 3.000 ped/h DAILY CONDITION | AW1 = LOS C AW2 = LOS C AW3 = LOS B AE1 = LOS B AE2 = LOS D AE3 = LOS C | RW1 = LOS D RW2 = LOS D RE1 = LOS D RE2 = LOS B |
| 4TH SCENARIO | 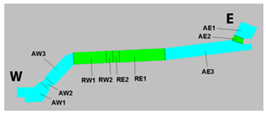 | 1.650 ped/h EVACUATION | AW1 = LOS B AW2 = LOS B AW3 = LOS B AE1 = LOS B AE2 = LOS C AE3 = LOS B | RW1 = LOS C RW2 = LOS C RE1 = LOS C RE2 = LOS C |
| 5TH SCENARIO | 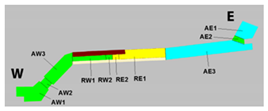 | 1.500 ped/h MAINTENANCE | AW1 = LOS B AW2 = LOS C AW3 = LOS C AE1 = LOS B AE2 = LOS C AE3 = LOS B | RW1 = LOS C RW2 = LOS C RE1 = LOS D RE2 = LOS D |
| 6TH SCENARIO | 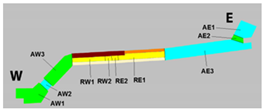 | 3.000 ped/h MAINTENANCE | AW1 = LOS C AW2 = LOS B AW3 = LOS C AE1 = LOS B AE2 = LOS C AE3 = LOS B | RW1 = LOS D RW2 = LOS D RE1 = LOS E RE2 = LOS D |
| 7TH SCENARIO | 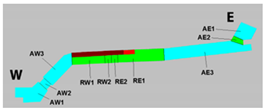 | 1.650 ped/h EVACUATION + MAINTENANCE | AW1 = LOS B AW2 = LOS B AW3 = LOS B AE1 = LOS B AE2 = LOS C AE3 = LOS B | RW1 = LOS C RW2 = LOS C RE1 = LOS F RE2 = LOS C |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Campisi, T.; Canale, A.; Tesoriere, G.; Lovric, I.; Čutura, B. The Importance of Assessing the Level of Service in Confined Infrastructures: Some Considerations of the Old Ottoman Pedestrian Bridge of Mostar. Appl. Sci. 2019, 9, 1630. https://doi.org/10.3390/app9081630
Campisi T, Canale A, Tesoriere G, Lovric I, Čutura B. The Importance of Assessing the Level of Service in Confined Infrastructures: Some Considerations of the Old Ottoman Pedestrian Bridge of Mostar. Applied Sciences. 2019; 9(8):1630. https://doi.org/10.3390/app9081630
Chicago/Turabian StyleCampisi, Tiziana, Antonino Canale, Giovanni Tesoriere, Ivan Lovric, and Boris Čutura. 2019. "The Importance of Assessing the Level of Service in Confined Infrastructures: Some Considerations of the Old Ottoman Pedestrian Bridge of Mostar" Applied Sciences 9, no. 8: 1630. https://doi.org/10.3390/app9081630
APA StyleCampisi, T., Canale, A., Tesoriere, G., Lovric, I., & Čutura, B. (2019). The Importance of Assessing the Level of Service in Confined Infrastructures: Some Considerations of the Old Ottoman Pedestrian Bridge of Mostar. Applied Sciences, 9(8), 1630. https://doi.org/10.3390/app9081630