Design and Test of a Comb-Brush-Type Honeysuckle-Picking Device


Abstract
:1. Introduction
2. Materials and Methods
2.1. Structure of the Whole Machine and Working Principle
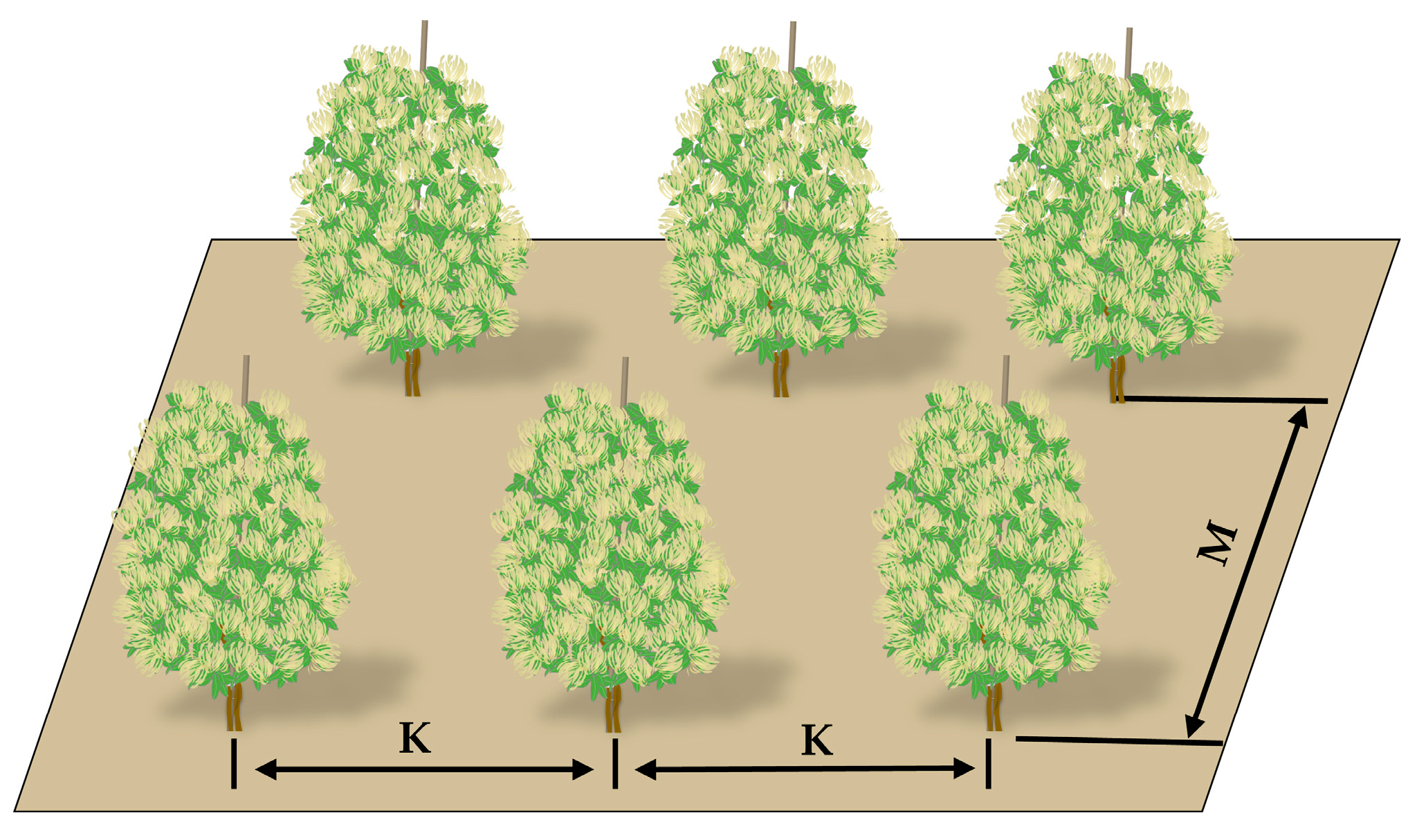
2.1.1. Honeysuckle Cultivation Mode
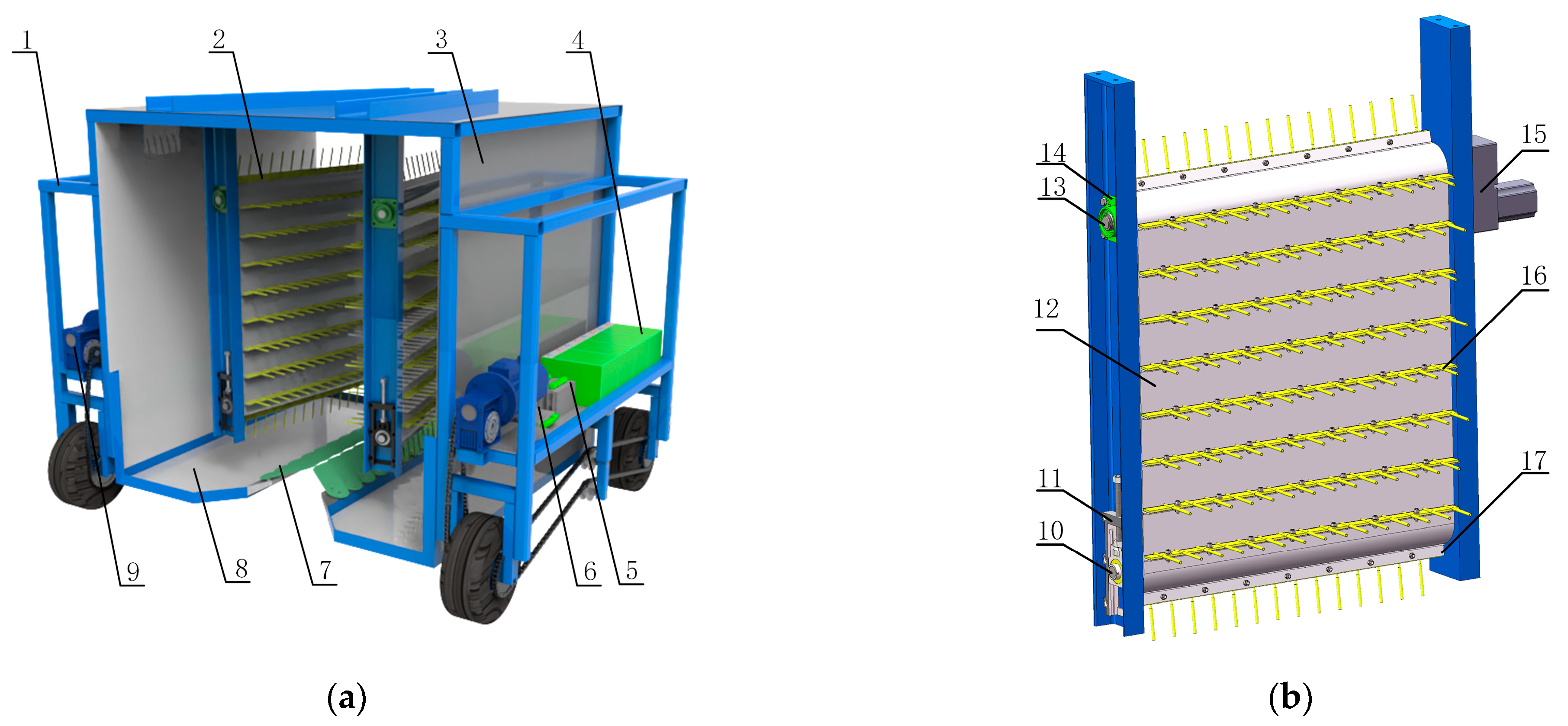
2.1.2. Structure of the Whole Machine
2.1.3. Working Principle
2.2. Design of Critical Components for a Comb-Brush-Type Picking Mechanism
2.2.1. Width of the Picking Belt
2.2.2. Picking Radius
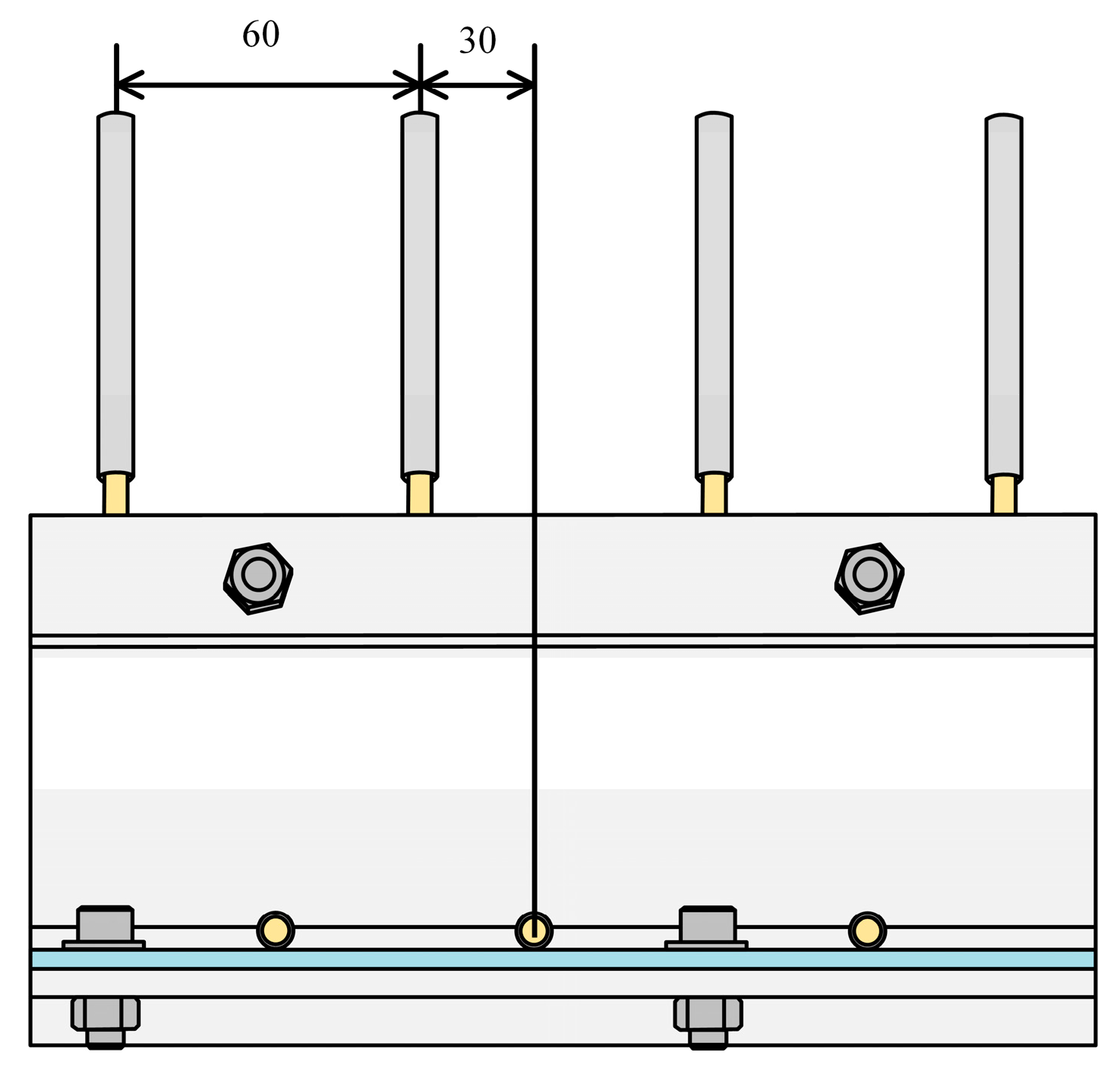
2.2.3. Design of Picking Teeth
2.2.4. Design of the T-Belt
2.3. Analysis of the Picking Process
2.3.1. Analysis of the Picking Process by Picking Teeth
2.3.2. Analysis of the Picking Tooth Movement Process
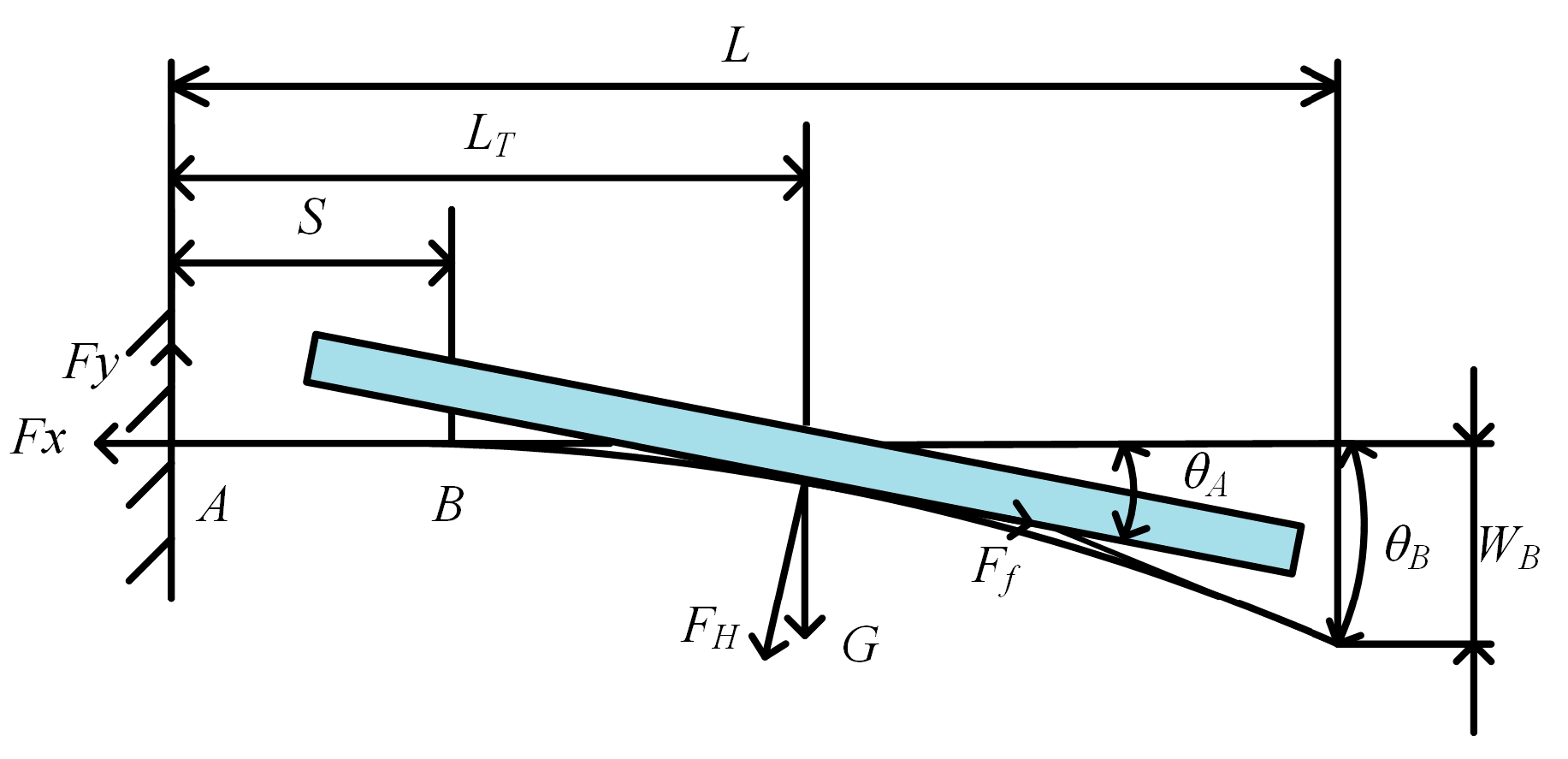
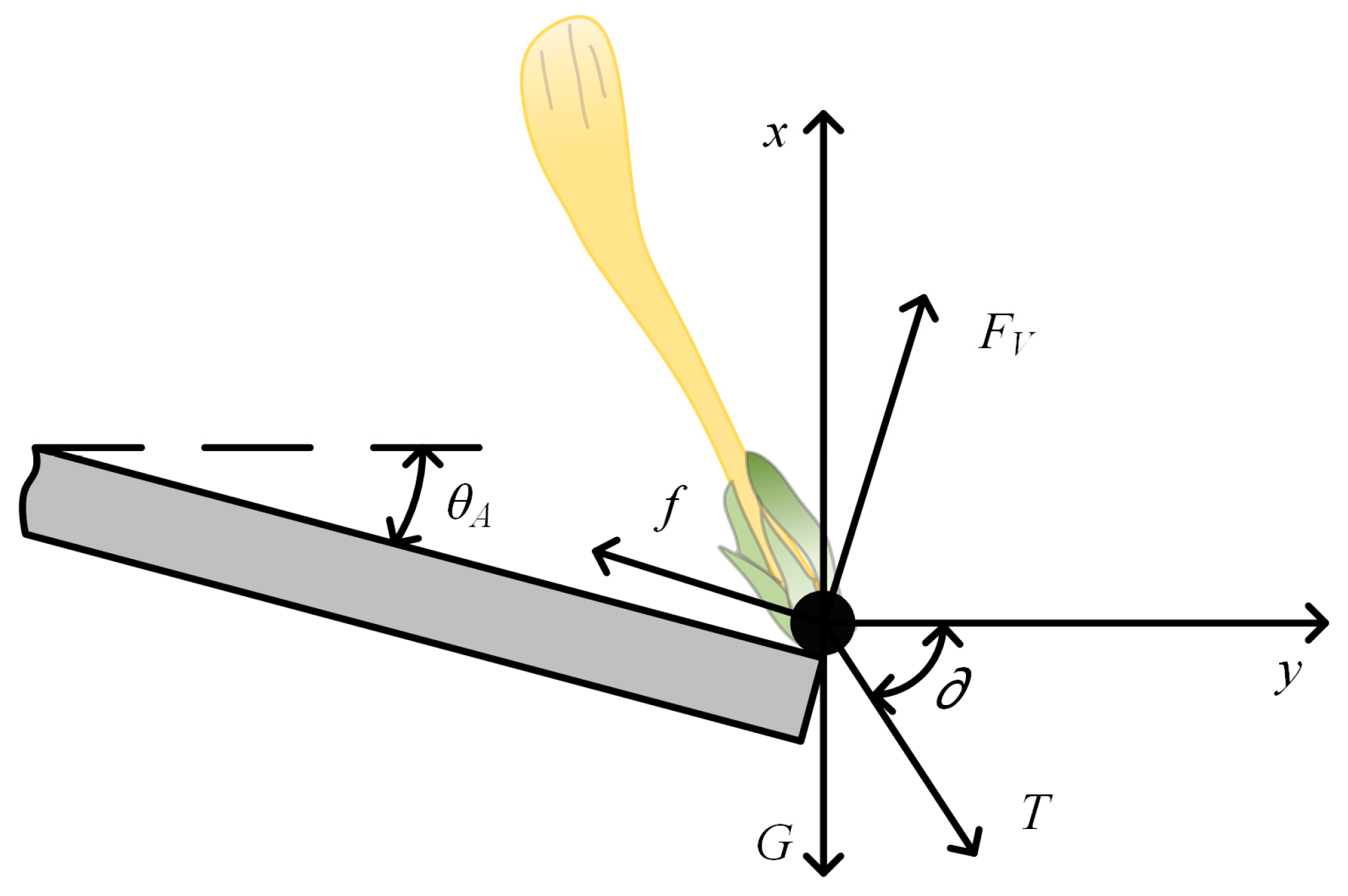
2.3.3. Picking Tooth Strike Force Analysis
2.4. Performance Test of the Honeysuckle-Picking Device
2.4.1. Test Condition
2.4.2. Test Apparatus and Device
2.4.3. Test Methods
- Honeysuckle picking rate Y1
- 2.
- Honeysuckle breakage rate Y2
- 3.
- Impurity rate Y3
2.4.4. Single-Factor Test Design
2.4.5. Orthogonal Test Design
3. Results
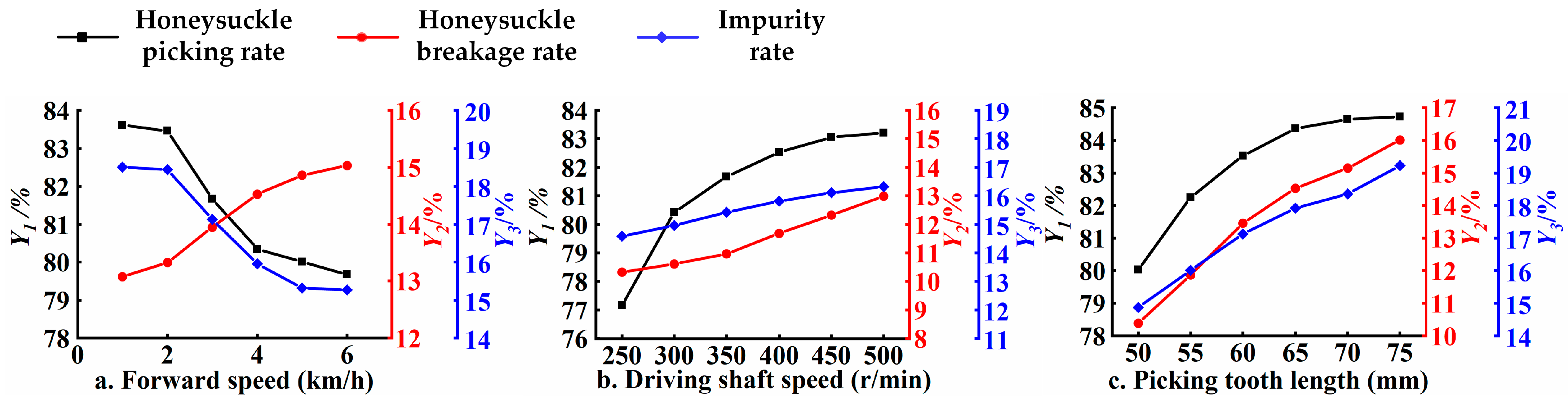
3.1. Results and Analysis of the Single-Factor Test
3.2. Orthogonal Test Results and Analysis of Variance
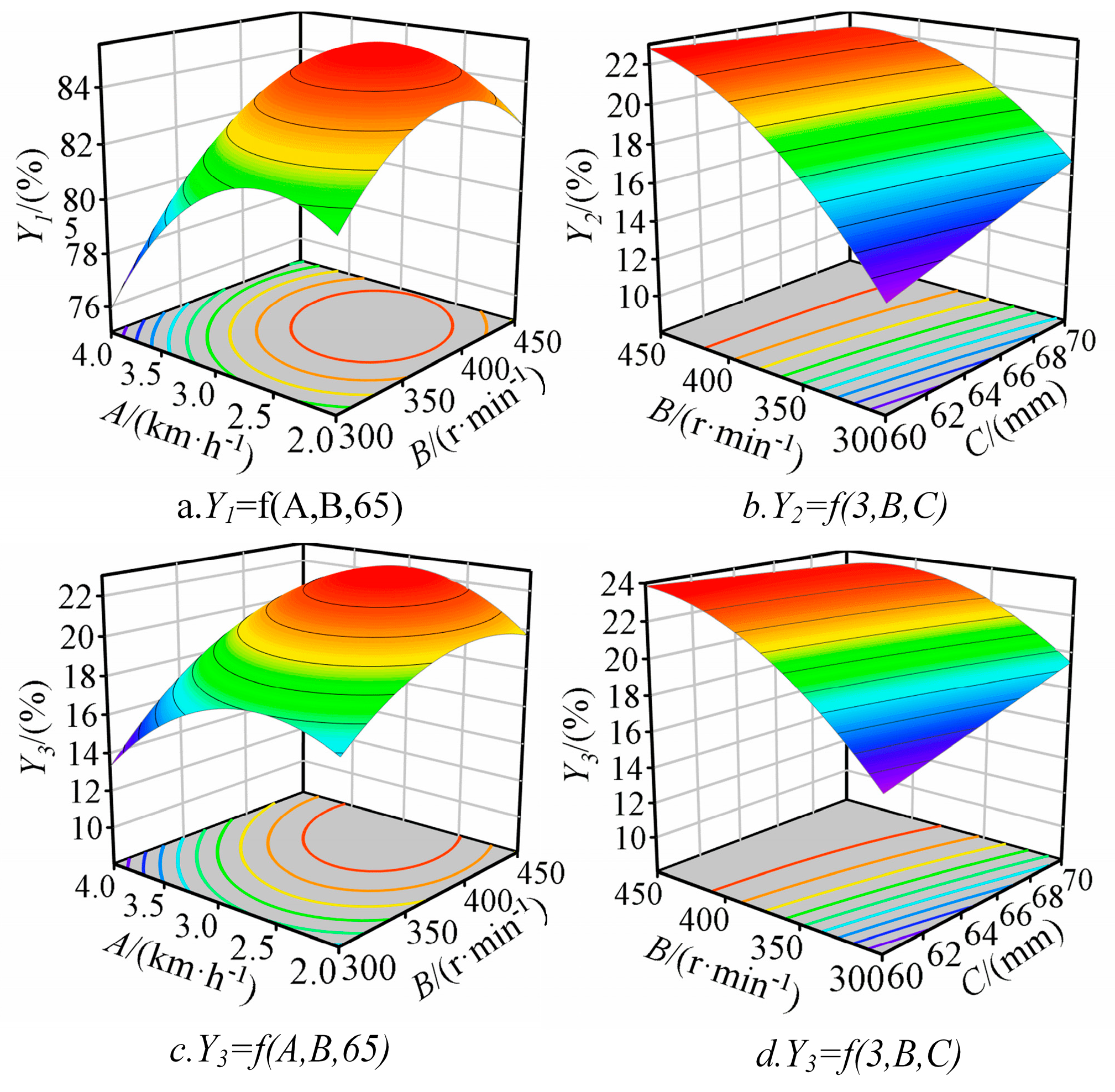
3.3. Response Surface Analysis
3.4. Parameter Optimization and Test Validation
3.4.1. Parameter Optimization
3.4.2. Test Validation
4. Discussion
- (1)
- The picking rod teeth are designed as rigid inside and flexible outside. While this design helps protect the branches, it can lead to issues like leaf detachment and bud breakage. Subsequent research can focus on optimizing the material of the picking times to reduce both the breakage and impurity rates.
- (2)
- The primary objective of this device is to validate and test the feasibility of its harvesting method. Consequently, the design of the bud collection component has been kept simplified. The device’s bud transportation and collection mechanism can be further developed to create a fully automated honeysuckle harvesting machine.
- (3)
- Considering the subsequent collection of flower buds, the current device is designed to operate within relatively confined spaces. Each operation requires precise row-to-row alignment. Significant deviations in alignment could result in the device pushing over the plants, causing damage. Subsequent iterations of the device should be optimized for accurate row-to-row operation. This may involve the integration of sensors for real-time monitoring or improvements and refinements to its mechanical structure, all aimed at achieving precise row-to-row alignment.
5. Conclusions
- (1)
- In this study, the device’s overall structure and operational principles were elucidated. The picking belt was determined to have a width of 900 mm, a picking radius of 200 mm, and an arrangement of 18 rows of picking teeth. The material for the T-belt was specified as PU polyurethane, with cross-sectional dimensions designed to be 30 mm in length and 5 mm in width. Additionally, it was established that forward speed, driving shaft speed, and picking teeth length were the primary influencing factors affecting operational efficiency.
- (2)
- The optimal parameter ranges were determined through a single-factor test: a forward speed between 2 km/h and 4 km/h, a driving shaft speed between 300 rpm and 450 rpm, and a picking teeth length between 60 mm and 70 mm. We conducted variance analysis to assess significance and fitted regression equations. Utilizing the response surface methodology, the interaction effects of these factors on the evaluation criteria were analyzed, and model parameters were optimized. The optimal parameter combination obtained was a forward speed of 3.99 km/h, a driving shaft speed of 316.53 rpm, and a picking teeth length of 70 mm. Corresponding predictions for honeysuckle picking, breakage, and impurity rates were 79.59%, 11.46%, and 14.31%, respectively.
- (3)
- In order to validate the optimized parameters, verification tests were conducted, and the results showed a honeysuckle picking rate of 78.48%, a honeysuckle breakage rate of 12.02%, and an impurity rate of 14.76%. The maximum relative error between the test validation values and the predicted values was 4.86%. This demonstrates a high degree of model fit and indicates that the research findings can provide valuable insights for designing honeysuckle harvesting devices.
6. Patents
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Conflicts of Interest
References
- Shang, X.; Pan, H.; Li, M.; Miao, X.; Ding, H. Lonicera japonica Thunb.: Ethnopharmacology, phytochemistry and pharmacology of an important traditional Chinese medicine. J. Ethnopharmacol. 2011, 138, 1–21. [Google Scholar] [CrossRef] [PubMed]
- Gao, B.; Zhu, L.; Liu, Z.; Li, Y.; He, X.; Wu, X.; Pehrsson, P.; Sun, J.H.; Xie, Z.H.; Slavin, M.; et al. Chemical Composition of Honeysuckle (Lonicerae japonicae) Extracts and Their Potential in Inhibiting the SARS-CoV-2 Spike Protein and ACE2 Binding, Suppressing ACE2, and Scavenging Radicals. J. Agric. Food Chem. 2023, 71, 6133–6143. [Google Scholar] [CrossRef] [PubMed]
- Lee, Y.R.; Chang, C.M.; Yeh, Y.C.; Huang, C.Y.F.; Lin, F.M.; Huang, J.T.; Hsieh, C.C.; Wang, J.R.; Liu, H.S. Honeysuckle aqueous extracts induced let-7a suppress EV71 replication and pathogenesis in vitro and in vivo and is predicted to inhibit SARS-CoV-2. Viruses 2021, 13, 308. [Google Scholar] [CrossRef] [PubMed]
- Li, M.W.; Wang, Y.X.; Jin, J.; Dou, J.; Guo, Q.L.; Ke, X.; Zhou, C.L.; Guo, M. Inhibitory activity of honeysuckle extracts against influenza A virus in vitro and in vivo. Virol. Sin. 2021, 36, 490–500. [Google Scholar] [CrossRef]
- Yuan, Y.; Yang, J.; Yu, X.; Huang, L.; Lin, S. Anthocyanins from buds of Lonicera japonica Thunb. var. chinensis (Wats.) Bak. Food Res. Int. 2014, 62, 812–818. [Google Scholar] [CrossRef]
- Dung, N.T.; Bajpai, V.K.; Rahman, A.; Yoon, J.I.; Kang, S.C. Phenolic contents, antioxidant and tyrosinase inhibitory activities of Lonicera japonica Thumb. J. Food Biochem. 2011, 35, 148–160. [Google Scholar] [CrossRef]
- Seo, O.N.; Kim, G.S.; Park, S.; Lee, J.H.; Kim, Y.H.; Lee, W.S.; Lee, S.J.; Kim, C.Y.; Jin, J.S.; Choi, S.K.; et al. Determination of polyphenol components of Lonicera japonica Thunb. using liquid chromatography–tandem mass spectrometry: Contribution to the overall antioxidant activity. Food Chem. 2012, 134, 572–577. [Google Scholar] [CrossRef]
- Gao, L. Analysis of countermeasures for the development of honeysuckle industry. Shanxi Agric. Econ. 2022, 16, 152–154. [Google Scholar]
- Gu, Y.X.; Cao, J.; Ye, L.H. Nano-ZnO-assisted matrix solid phase dispersion microextraction combined with an in situ DES-based aqueous two-phase system for the enrichment of multiple active compounds in honeysuckles. Ind. Crops Prod. 2022, 188, 115708. [Google Scholar] [CrossRef]
- Tao, Z.; Xiao, F.Z.; Guo, Y.Y. Design and innovation research of adjustable speed honeysuckle picking machine. Hubei Agric. Mech. 2020, 13, 116–117. [Google Scholar]
- Gao, S.; Yang, X.P.; Dong, W.L. Design of a self-propelled honeysuckle harvester. Xinjiang Agric. Mech. 2023, 2, 16–18+28. [Google Scholar]
- Luo, H.W.; Li, Z.M.; Yang, X.L.; Sun, B.G.; Ma, J.M. The design of honeysuckle picker with both flowers and leaves. For. Mach. Woodwork. Equip. 2023, 51, 18–23. [Google Scholar]
- Wang, R.; Zheng, Z.; Lu, X.; Gao, L.; Jiang, D.; Zhang, Z. Design, simulation and test of roller comb type Chrysanthemum (Dendranthema morifolium Ramat) picking machine. Comput. Electron. Agric. 2021, 187, 106295. [Google Scholar] [CrossRef]
- Jin, L.; Xinyan, Q.; Chen, Y. Design and Analysis on Key Components of a Novel Chili PepperHarvester’s Picking Device. Open Mech. Eng. J. 2015, 9, 540–545. [Google Scholar] [CrossRef]
- Ehlert, D.; Beier, K. Development of picking devices for chamomile harvesters. J. Appl. Res. Med. Aromat. Plants 2014, 1, 73–80. [Google Scholar] [CrossRef]
- Brabandt, H.; Ehlert, D. Chamomile harvesters: A review. Ind. Crops Prod. 2011, 34, 818–824. [Google Scholar] [CrossRef]
- Liu, Z.Y.; Jin, C.Q.; Yusn, W.S.; Feng, Y.G.; Yuan, J.M. Design Optimization and Experiment of Spring-tooth Drum Type Picking Device for Vegetable Soybean Harvester. Trans. Chin. Soc. Agric. Mach. 2022, 53, 171–180. [Google Scholar]
- Liu, L.; Wu, T.; Kong, F.T.; Sun, Y.F.; Chen, C.L.; Xie, Q.; Shi, L. Optimized design and experiment of the picking mechanism for brush-roller castor harvesters. Trans. Chin. Soc. Agric. Eng. 2021, 37, 19–29. [Google Scholar]
- Xu, L.M.; Chen, J.W.; Wu, G.; Yuan, Q.C.; Ma, S.; Yu, C.C.; Duan, Z.Z.; Xing, J.J.; Liu, X.D. Design and operating parameter optimization of comb brush vibratory harvesting device for wolfberry. Trans. Chin. Soc. Agric. Eng. 2018, 34, 75–82. [Google Scholar]
- Di, L.; Yang, Z.D. Design of Brush-Type Camptotheca Acuminata Leaf Picking and Collecting Machine. Agric. Equip. Veh. Eng. 2020, 58, 28–31. [Google Scholar]
- Rao, H.H.; Wang, Y.L.; Li, Q.S.; Wang, B.Y.; Yang, J.L.; Liu, M.H. Design and Experiment of Camellia Fruit Layered Harvesting Device. Trans. Chin. Soc. Agric. Mach. 2021, 52, 203–212. [Google Scholar]
- Zhou, L.; Li, J.; Ding, L.; Ding, H.; Liang, J. Analysis and Design of Operating Parameters of Floor-Standing Jujube Pickup Device Based on Discrete Element Method. Agriculture 2022, 12, 1904. [Google Scholar] [CrossRef]
- Zong, W.Y.; Huang, M.C.; Xiao, Y.Y.; Li, M.; Deng, D. Design and experiment of the fruit-beating dropping device for chestnut harvesters. Trans. Chin. Soc. Agric. Eng. 2021, 37, 1–10. [Google Scholar]
- Bao, Y.D.; Yang, C.; Zhao, Y.L.; Liu, X.L.; Guo, Y.L. Collision injury assessment of mechanical harvesting blueberry fruit based on collision deformation energy. Trans. Chin. Soc. Agric. Eng. 2017, 33, 283–292. [Google Scholar]
- Xu, L.Z.; Li, Y.M. Critical Speed of Impact Damage on a Rice Kernel. Trans. Chin. Soc. Agric. Mach. 2009, 40, 54–57. [Google Scholar]
- GB/T 8097-2008; Harvesting Machinery Harvester Test Methods. Standardization Administration of PRC: Beijing, China, 2008.
- NY/T 2303-2013; Agricultural Grade Specifications Honeysuckle. Industry Standards-Agriculture: Beijing, China, 2013.
- Gao, Y.; Wang, Y.; Kang, F.; Kan, J. Multi-objective optimization of cross-section integrity rate and sawing power consumption in sawing Caragana korshinskii Kom. Branches. Ind. Crops Prod. 2023, 193, 116244. [Google Scholar] [CrossRef]
- Zhang, Z.; Li, J.; Wang, X.; Zhao, Y.; Xue, S.; Su, Z.; Liang, J. Design and test of 1SMB-3600A type fragmented mulch film collector for sowing layer soil. Soil Tillage Res. 2023, 225, 105555. [Google Scholar] [CrossRef]
- Shi, G.; Li, J.; Kan, Z.; Ding, L.; Ding, H.; Zhou, L.; Wang, L. Design and Parameters Optimization of a Provoke-Suction Type Harvester for Ground Jujube Fruit. Agriculture 2022, 12, 409. [Google Scholar] [CrossRef]
- Zhang, Z.; Li, J.; Wang, X.; Zhao, Y.; Xue, S.; Su, Z. Parameters Optimization and Test of an Arc-Shaped Nail-Tooth Roller-Type Recovery Machine for Sowing Layer Residual Film. Agriculture 2022, 12, 660. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Level | Forward Speed /(km·h−1) | Driving Shaft Speed /(r·min−1) | Length of Picking Teeth /(mm) |
|---|---|---|---|
| 1 | 2 | 300 | 60 |
| 0 | 3 | 375 | 65 |
| −1 | 4 | 450 | 70 |
| No. | A | B | C | Honeysuckle Harvesting Rate /Y1(%) | Honeysuckle Breakage Rate /Y2(%) | Impurity Rate/ Y3(%) |
|---|---|---|---|---|---|---|
| 1 | 4 | 300 | 65 | 77.14 | 8.92 | 12.44 |
| 2 | 3 | 375 | 65 | 85.14 | 15.12 | 18.65 |
| 3 | 3 | 375 | 65 | 85.99 | 15.94 | 19.47 |
| 4 | 4 | 375 | 60 | 79.12 | 10.15 | 13.68 |
| 5 | 3 | 450 | 70 | 85.65 | 15.22 | 18.75 |
| 6 | 3 | 375 | 65 | 86.42 | 16.44 | 19.96 |
| 7 | 2 | 450 | 65 | 83.17 | 12.51 | 16.04 |
| 8 | 4 | 450 | 65 | 83.11 | 13.97 | 17.49 |
| 9 | 3 | 300 | 70 | 83.56 | 13.52 | 17.04 |
| 10 | 2 | 375 | 60 | 84.03 | 14.04 | 17.56 |
| 11 | 3 | 375 | 65 | 86.21 | 16.25 | 19.77 |
| 12 | 3 | 375 | 65 | 86.34 | 16.33 | 19.85 |
| 13 | 4 | 375 | 70 | 82.97 | 12.94 | 16.46 |
| 14 | 3 | 450 | 60 | 83.63 | 15.96 | 19.47 |
| 15 | 2 | 300 | 65 | 80.61 | 10.62 | 14.84 |
| 16 | 3 | 300 | 60 | 80.24 | 10.25 | 13.77 |
| 17 | 2 | 375 | 70 | 84.66 | 14.68 | 18.20 |
| Index | Source of Variance | Sum of Squares | Freedom | Mean Square | F | p |
|---|---|---|---|---|---|---|
| Y1 | Model | 114.61 | 9 | 12.73 | 25.42 | 0.0002 ** |
| A | 12.83 | 1 | 12.83 | 25.60 | 0.0015 ** | |
| B | 24.54 | 1 | 24.54 | 48.97 | 0.0002 ** | |
| C | 12.05 | 1 | 12.05 | 24.06 | 0.0017 ** | |
| AB | 2.91 | 1 | 2.91 | 5.80 | 0.0469 * | |
| AC | 2.59 | 1 | 2.59 | 5.17 | 0.0571 | |
| BC | 0.42 | 1 | 0.42 | 0.84 | 0.3890 | |
| A2 | 32.86 | 1 | 32.86 | 65.59 | 0.0001 ** | |
| B2 | 20.73 | 1 | 20.73 | 41.37 | 0.0004 ** | |
| C2 | 1.19 | 1 | 1.19 | 2.37 | 0.1674 | |
| Residual | 3.51 | 7 | 0.50 | |||
| Lack of Fit | 2.43 | 3 | 0.81 | 3.02 | 0.1566 | |
| Pure Error | 1.07 | 4 | 0.27 | |||
| Total | 118.12 | 16 | ||||
| Y2 | Model | 90.49 | 9 | 10.05 | 14.36 | 0.0010 ** |
| A | 4.31 | 1 | 4.31 | 6.15 | 0.0422 * | |
| B | 25.74 | 1 | 25.74 | 36.76 | 0.0005 ** | |
| C | 4.44 | 1 | 4.44 | 6.34 | 0.0399 * | |
| AB | 2.50 | 1 | 2.50 | 3.56 | 0.1010 | |
| AC | 1.16 | 1 | 1.16 | 1.65 | 0.2398 | |
| BC | 4.02 | 1 | 4.02 | 5.74 | 0.0478 * | |
| A2 | 29.52 | 1 | 29.52 | 42.16 | 0.0003 ** | |
| B2 | 14.61 | 1 | 14.16 | 20.87 | 0.0026** | |
| C2 | 0.73 | 1 | 0.73 | 1.04 | 0.3422 | |
| Residual | 4.90 | 7 | 0.70 | |||
| Lack of Fit | 3.76 | 3 | 1.25 | 4.39 | 0.0934 | |
| Pure Error | 1.14 | 4 | 0.29 | |||
| Total | 95.39 | 16 | ||||
| Y3 | Model | 87.40 | 9 | 9.71 | 16.53 | 0.0006 ** |
| A | 5.40 | 1 | 5.40 | 9.19 | 0.0191 * | |
| B | 23.32 | 1 | 23.32 | 39.71 | 0.0004 ** | |
| C | 4.46 | 1 | 4.46 | 7.59 | 0.0283 * | |
| AB | 3.71 | 1 | 3.71 | 6.31 | 0.0403 * | |
| AC | 1.14 | 1 | 1.14 | 1.95 | 0.2053 | |
| BC | 3.98 | 1 | 3.98 | 6.78 | 0.0353 * | |
| A2 | 27.59 | 1 | 27.59 | 46.98 | 0.0002 ** | |
| B2 | 13.30 | 1 | 13.30 | 22.65 | 0.0021 ** | |
| C2 | 1.07 | 1 | 1.07 | 1.83 | 0.2184 | |
| Residual | 4.11 | 7 | 0.5873 | |||
| Lack of Fit | 2.99 | 3 | 0.9963 | 3.55 | 0.1263 | |
| Pure Error | 1.12 | 4 | 0.2806 | |||
| Total | 91.51 | 16 |
| Items | Honeysuckle Picking Rate Y1/% | Honeysuckle Breakage Rate Y2/% | Impurity Rate Y3/% |
|---|---|---|---|
| Model-Optimized Values | 79.59 | 11.46 | 14.31 |
| Test Validation Values | 78.48 | 12.02 | 14.76 |
| Relative error | 1.43% | 4.86% | 3.12% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, L.; Li, S.; Li, J.; Wen, B.; Cen, H.; Wang, M.; Li, Y.; Song, K.; Zhang, Z. Design and Test of a Comb-Brush-Type Honeysuckle-Picking Device. Agriculture 2023, 13, 2088. https://doi.org/10.3390/agriculture13112088
Li L, Li S, Li J, Wen B, Cen H, Wang M, Li Y, Song K, Zhang Z. Design and Test of a Comb-Brush-Type Honeysuckle-Picking Device. Agriculture. 2023; 13(11):2088. https://doi.org/10.3390/agriculture13112088
Chicago/Turabian StyleLi, Linfeng, Shufeng Li, Jingbin Li, Baoqin Wen, Honglei Cen, Meng Wang, Yingjie Li, Kangle Song, and Zhiyuan Zhang. 2023. "Design and Test of a Comb-Brush-Type Honeysuckle-Picking Device" Agriculture 13, no. 11: 2088. https://doi.org/10.3390/agriculture13112088