

Design of an Electronically Controlled Fertilization System for an Air-Assisted Side-Deep Fertilization Machine

Abstract
:1. Introduction
2. Materials and Methods
2.1. Design of Air-Assisted Side-Deep Fertilization Machine
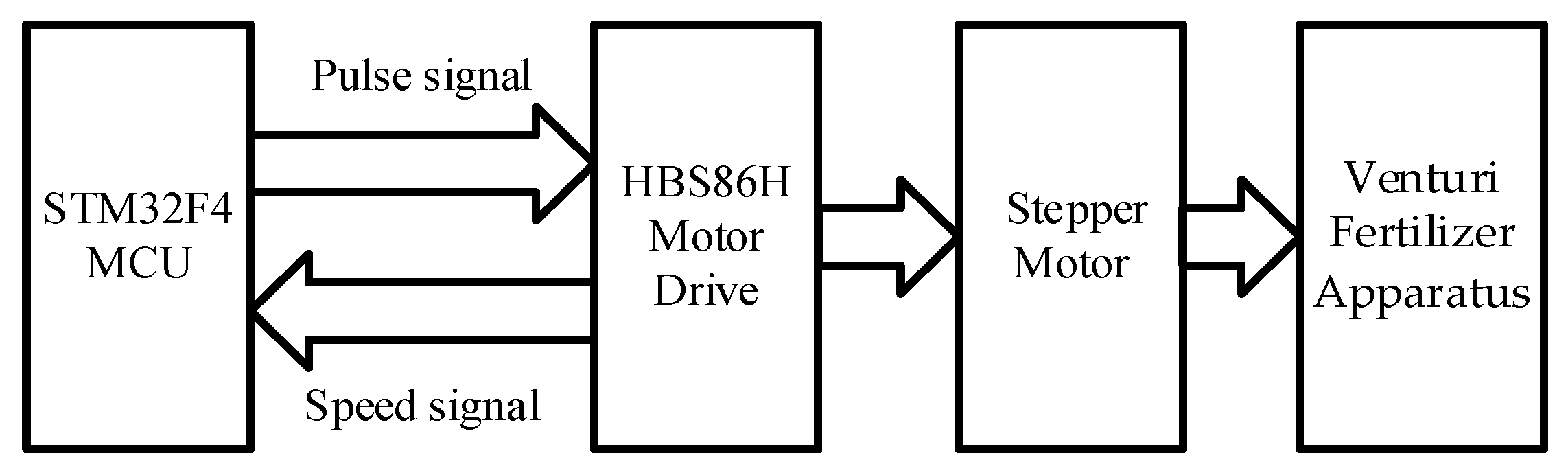
2.2. Electronic Control Hardware of Precise Fertilizer Discharge Module
2.3. Mathematical Model and Transfer Function Model of a Stepper Motor
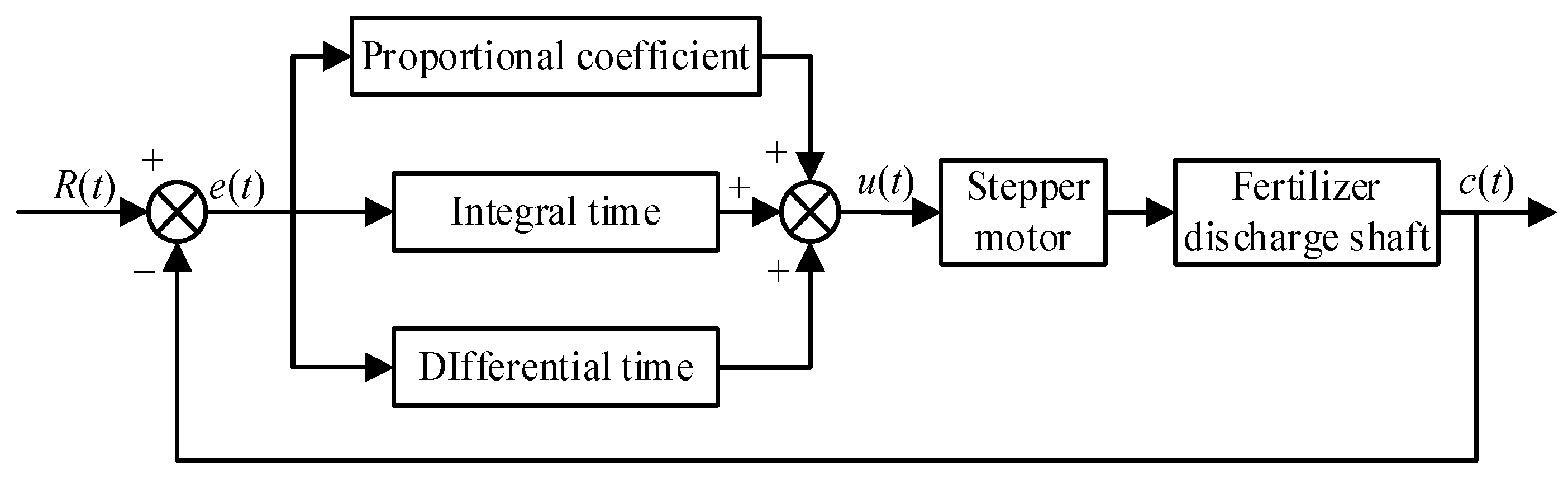
2.4. PID Control Algorithm of Stepper Motors
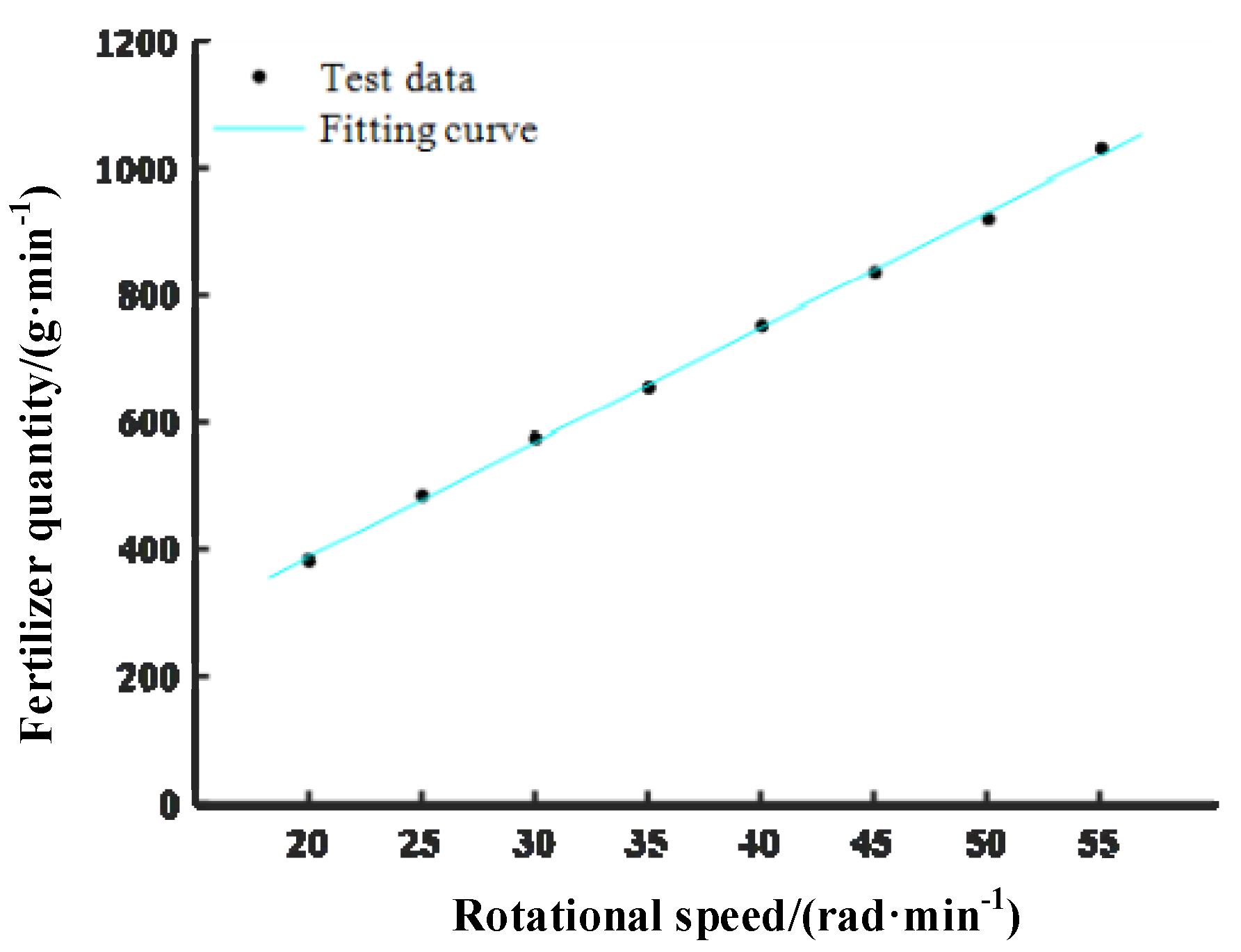
2.5. Mathematical Model of Fertilizer Discharge and Stepper Motor Rotational Speed
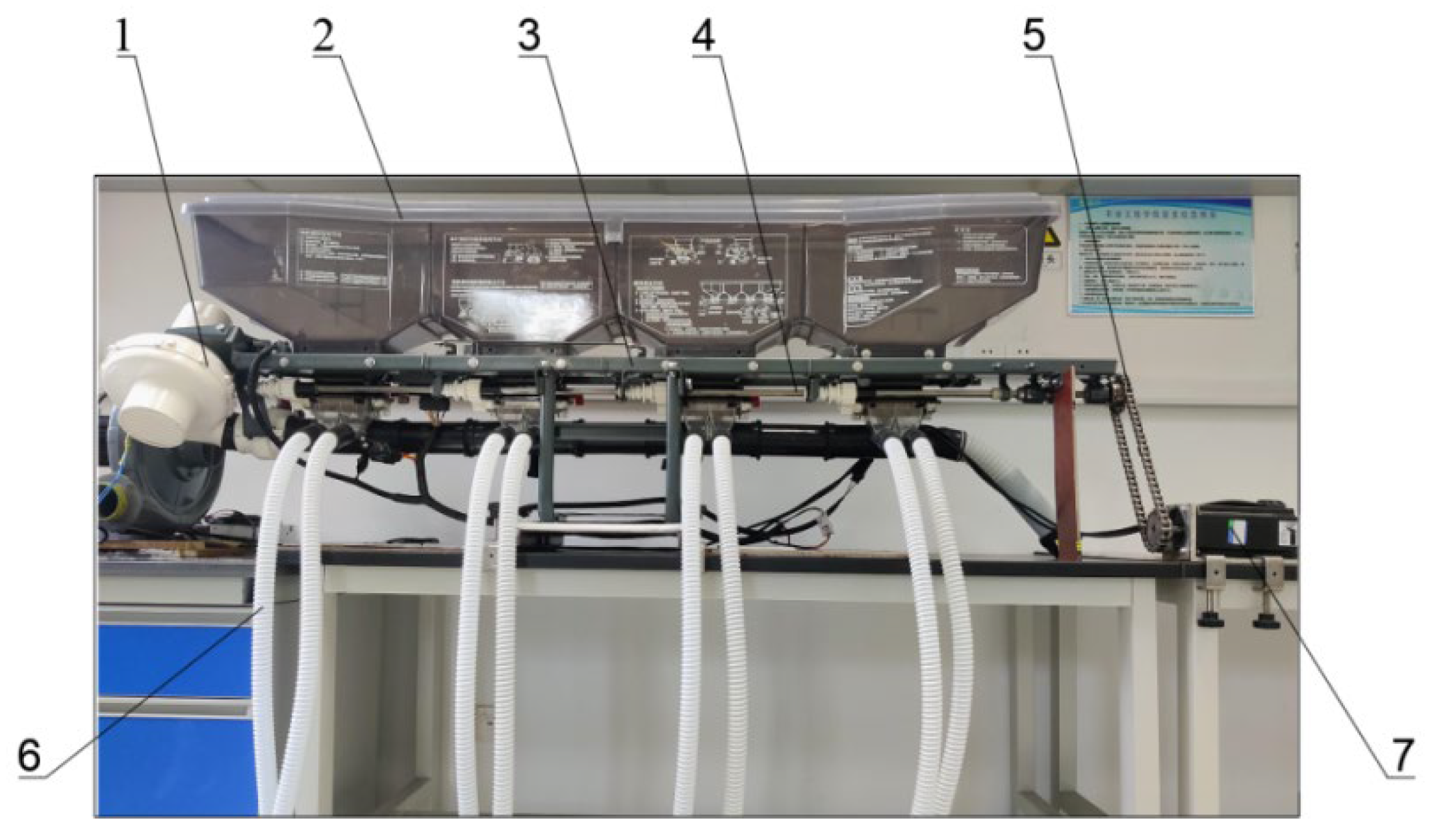
2.6. Construction of Validation Test Platform
3. Results and Discussion
3.1. Parameter Setting Results of CST
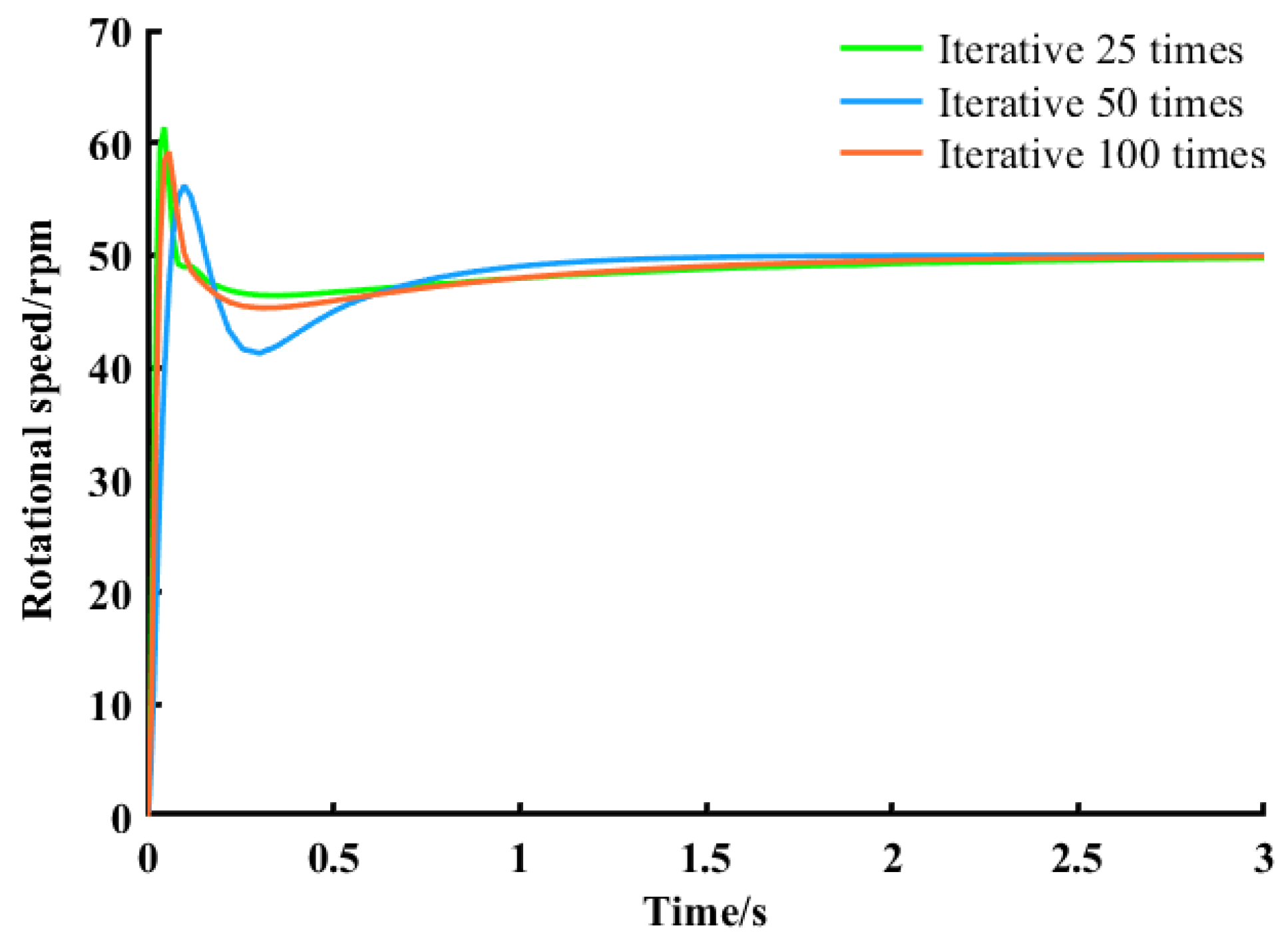
3.2. Parameter Setting Results of PSO
3.3. Results of Mathematical Model between Fertilizer Discharge and Stepper Motor Rotational Speed
3.4. Platform Test Results of Precise Fertilizer Discharge Control System
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Conflicts of Interest
References
- Min, J.; Sun, H.; Wang, Y.; Pan, Y.; Kronzucker, H.J.; Zhao, D.; Shi, W. Mechanical side-deep fertilization mitigates ammonia volatilization and nitrogen runoff and increases profitability in rice production independent of fertilizer type and split ratio. J. Clean. Prod. 2021, 316, 128370. [Google Scholar] [CrossRef]
- Wang, J.; Wang, Z.; Weng, W.; Liu, Y.; Fu, Z.; Wang, J. Development status and trends in side-deep fertilization of rice. Renew. Agric. Food Syst. 2022, 37, 550. [Google Scholar] [CrossRef]
- Zha, X.; Zhang, G.; Zhang, S.; Hou, Q.; Wang, Y.; Zhou, Y. Design and experiment of centralized pneumatic deep precision fertilization device for rice transplanter. Int. J. Agric. Biol. Eng. 2020, 13, 109–117. [Google Scholar] [CrossRef]
- Shen, J.; Zhang, F.; Siddique, K. Sustainable resource use in enhancing agricultural development in China. Engineering 2018, 4, 21–24. [Google Scholar] [CrossRef]
- Chen, X.; Cui, Z.; Fan, M.; Vitousek, P.; Zhao, M.; Ma, W.; Wang, Z.; Zhang, W.; Yan, X.; Yang, J.; et al. Producing more grain with lower environmental costs. Nature 2014, 514, 486–489. [Google Scholar] [CrossRef]
- Wang, J.; Gao, G.; Weng, W.; Wang, J.; Yan, D.; Chen, B. Design and experiment of key components of side deep fertilization device for paddy field. Trans. Chin. Soc. Agric. Mach. 2018, 49, 92–104. [Google Scholar]
- Wang, J.; Gao, G.; Wang, J.; Yan, D. Design and test of adjustable blades side deep fertilizing device for paddy field. Trans. Chin. Soc. Agric. Mach. 2018, 49, 68–76. [Google Scholar]
- Yang, X.; Chen, B.; Xing, H.; Zhen, W.; Qi, L. Design and experiments of the side-deep fertilization device with sliding-knife furrow opener and pneumatic ejector for a liquid fertilizer atomizer. Trans. Chin. Soc. Agric. Eng. 2023, 39, 13–25. [Google Scholar]
- Chen, X.; Luo, X.; Wang, Z.; Zhang, M.; Hu, L.; Zeng, S.; Mo, Z. Experiment of synchronous side deep fertilizing technique with rice hill-drop drilling. Trans. Chin. Soc. Agric. Eng. 2014, 30, 1–7. [Google Scholar]
- Wang, J.; Fu, Z.; Weng, W.; Wang, Z.; Wang, J.; Yang, D. Design and experiment of conical-disc push plate double-row fertilizer apparatus for side-deep fertilization in paddy field. Trans. Chin. Soc. Agric. Mach. 2023, 54, 53–62. [Google Scholar]
- Wang, J.; Liu, Y.; Weng, W.; Wang, J.; Fu, Z.; Wang, Z. Design and experiment of chute rotary side deep fertilizing device in paddy field. Trans. Chin. Soc. Agric. Mach. 2022, 53, 76–85. [Google Scholar]
- Wang, J.; Shang, W.; Weng, W.; Wang, J.; Wang, Q.; Chen, X. Design and experiment of disc ejection type paddy field side deep fertilization device. Trans. Chin. Soc. Agric. Mach. 2021, 52, 62–72. [Google Scholar]
- Zuo, X.; Wu, G.; Fu, W.; Li, L.; Wei, X.; Zhao, C. Design and experiment on air-blast rice side deep precision fertilization device. Trans. Chin. Soc. Agric. Eng. 2016, 32, 14–21. [Google Scholar]
- Wang, J.; Li, S.; Zhang, Z.; Li, Q. Design and experiment of electrical drive side deep hill-drop fertilization system for precision rice hill-direct-seeding machine. Trans. Chin. Soc. Agric. Eng. 2018, 34, 43–54. [Google Scholar]
- Yang, R.; Chen, D.; Zha, X.; Pan, Z.; Shang, S. Optimization design and experiment of ear-picking and threshing devices of corn plot kernel harvester. Agriculture 2021, 11, 904. [Google Scholar] [CrossRef]
- Liu, Y.; Zhou, Y.; Lv, W.; Huang, H.; Zhang, G.; Tu, M.; Huang, L. Design and experiment of hydraulic scouring system of wide-width lotus root digging machine. Agriculture 2021, 11, 1110. [Google Scholar] [CrossRef]
- Pareek, C.; Tewari, V.; Machavaram, R.; Nare, B. Optimizing the seed-cell filling performance of an inclined plate seed metering device using integrated ANN-PSO approach. Artif. Intell. Agric. 2021, 5, 1–12. [Google Scholar] [CrossRef]
- Cousins, J.; Noble, S. Fast gas-solid flow simulation for air seeder control applications. In Proceedings of the 2019 ASABE Annual International Meeting, Boston, MA, USA, 7–10 July 2019; p. 1901667. [Google Scholar]
- Wei, G.; Qi, B.; Jiao, W.; Shi, S.; Jian, S. Design and experiment of mechanical forced fertilizing device for paddy field. Trans. Chin. Soc. Agric. Mach. 2020, 51, 154–164. [Google Scholar]
- Zeng, S.; Zheng, Z.; Yang, Z.; Luo, X.; Tan, Y.; Mo, Z. Design and test of airflow layered fertilizer system for rice direct seeder. Trans. Chin. Soc. Agric. Eng. 2020, 36, 1–9. [Google Scholar]
- Zhu, Q.; Zhang, H.; Zhu, Z.; Gao, Y.; Chen, L. Structural design and simulation of pneumatic conveying line for a paddy side-deep fertilisation system. Agriculture 2022, 12, 867. [Google Scholar] [CrossRef]
- Wang, B.; Luo, X.; Wang, Z.; Zheng, L.; Zhang, M.; Dai, Y.; Xing, H. Design and field evaluation of hill-drop pneumatic central cylinder direct-seeding machine for hybrid rice. Int. J. Agric. Biol. Eng. 2018, 11, 33–40. [Google Scholar] [CrossRef]
- Lei, X.; Liao, Y.; Zhang, Q.; Wang, L.; Liao, Q. Numerical simulation of seed motion characteristics of distribution head for rapeseed and wheat. Comput. Electron. Agric. 2018, 150, 98–109. [Google Scholar] [CrossRef]
- Zha, X.; Zhang, G.; Han, Y.; Han, Y.; Salem, A.E.; Fu, J.; Zhou, Y. Structural optimization and performance evaluation of blocking wheel-type screw fertilizer distributor. Agriculture 2021, 11, 248. [Google Scholar] [CrossRef]
- Lei, X.; Liao, Y.; Liao, Q. Simulation of seed motion in seed feeding device with DEM-CFD coupling approach for rapeseed and wheat. Comput. Electron. Agric. 2016, 131, 29–39. [Google Scholar] [CrossRef]
- Tola, E.; Kataoka, T.; Burce, M.; Okamoto, H.; Hata, S. Granular fertiliser application rate control system with integrated output volume measurement. Biosyst. Eng. 2008, 101, 411–416. [Google Scholar] [CrossRef]
- Toomey, C. Pneumatic conveying system optimization. IEEE Trans. Ind. Appl. 2014, 50, 4319–4322. [Google Scholar] [CrossRef]
- Zhu, Q.; Wu, G.; Zhu, Z.; Zhang, H.; Gao, Y.; Chen, L. Design and test on winter wheat precision separated layer fertilization and wide-boundary sowing combined machine. Trans. Chin. Soc. Agric. Mach. 2022, 53, 25–35. [Google Scholar]
- Keep, T.; Noble, S. Optical flow profiling method for visualization and evaluation of flow disturbances in agricultural pneumatic conveyance systems. Comput. Electron. Agric. 2015, 118, 159–166. [Google Scholar] [CrossRef]
- Wang, Z.; Zhang, L.; Peng, Z. Design of fuzzy pid excitation control based on PSO optimization algorithm. J. Hunan Univ. Nat. Sci. 2017, 44, 106–111+136. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Number | Target Fertilizer Discharge Mass/(g·min−1) | Actual Maximum Mass within 30 s/(g) | Actual Minimum Mass within 30 s/(g) | Actual Average Mass within 30 s/(g) | Stability Coefficient of Variation/(%) | Error of Fertilizer Discharge/(%) |
|---|---|---|---|---|---|---|
| 1 | 350 | 179.97 | 174.45 | 178.08 | 0.91 | 1.76 |
| 2 | 450 | 223.96 | 220.54 | 222.19 | 0.49 | 1.25 |
| 3 | 550 | 288.56 | 285.19 | 286.38 | 0.43 | 4.14 |
| 4 | 650 | 329.52 | 325.78 | 328.03 | 0.40 | 0.93 |
| 5 | 750 | 369.31 | 365.75 | 366.93 | 0.39 | 2.15 |
| 6 | 850 | 434.76 | 426.49 | 431.45 | 0.88 | 1.52 |
| 7 | 950 | 475.02 | 466.03 | 470.75 | 0.68 | 0.89 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhu, Q.; Zhu, Z.; Zhang, H.; Gao, Y.; Chen, L. Design of an Electronically Controlled Fertilization System for an Air-Assisted Side-Deep Fertilization Machine. Agriculture 2023, 13, 2210. https://doi.org/10.3390/agriculture13122210
Zhu Q, Zhu Z, Zhang H, Gao Y, Chen L. Design of an Electronically Controlled Fertilization System for an Air-Assisted Side-Deep Fertilization Machine. Agriculture. 2023; 13(12):2210. https://doi.org/10.3390/agriculture13122210
Chicago/Turabian StyleZhu, Qingzhen, Zhihao Zhu, Hengyuan Zhang, Yuanyuan Gao, and Liping Chen. 2023. "Design of an Electronically Controlled Fertilization System for an Air-Assisted Side-Deep Fertilization Machine" Agriculture 13, no. 12: 2210. https://doi.org/10.3390/agriculture13122210