Design and Experiment for Flexible Clamping and Conveying Device for Green Leafy Vegetable Orderly Harvester



Abstract
:1. Introduction
2. Materials and Methods
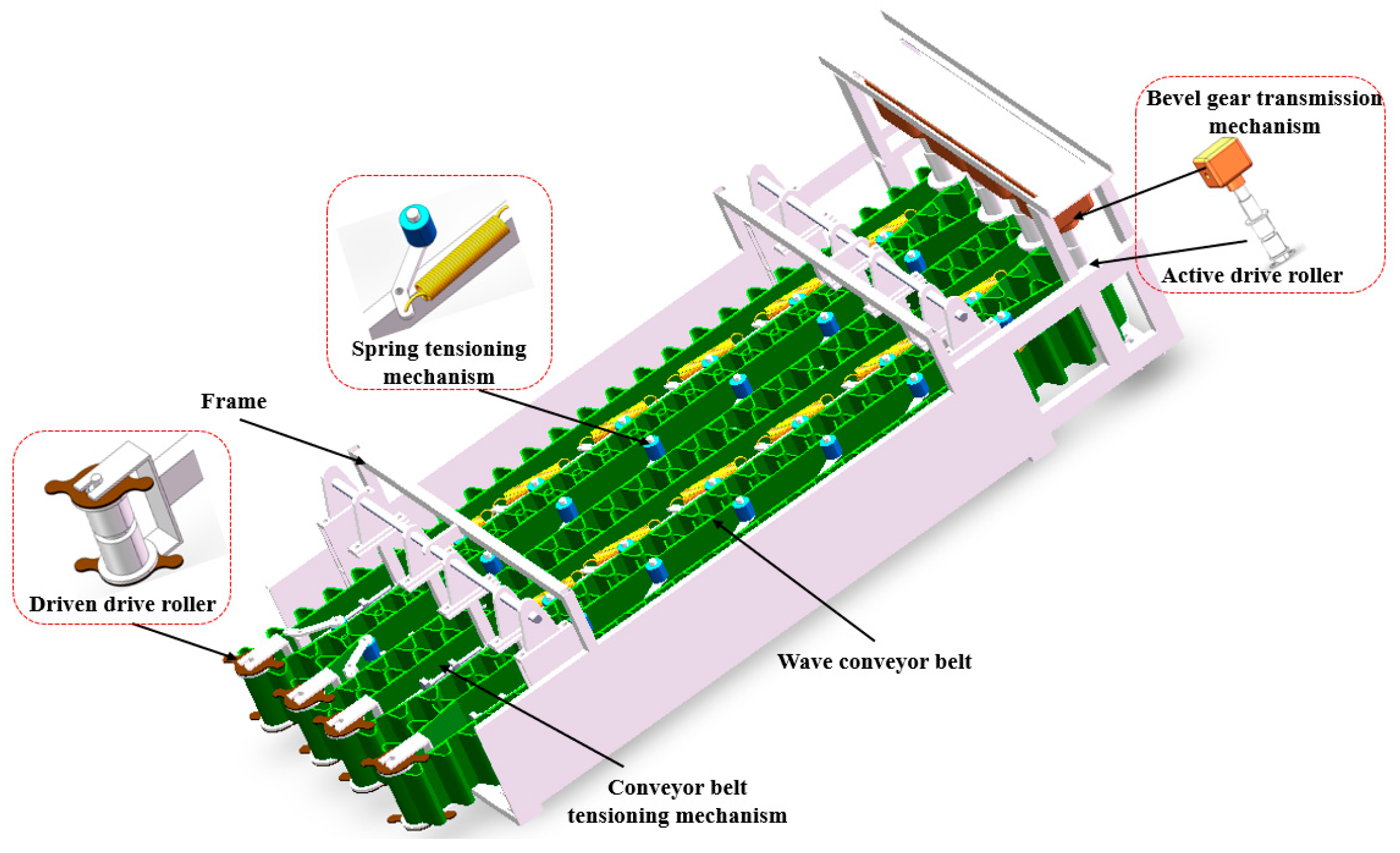
2.1. Structure of Flexible Clamping and Conveying Device
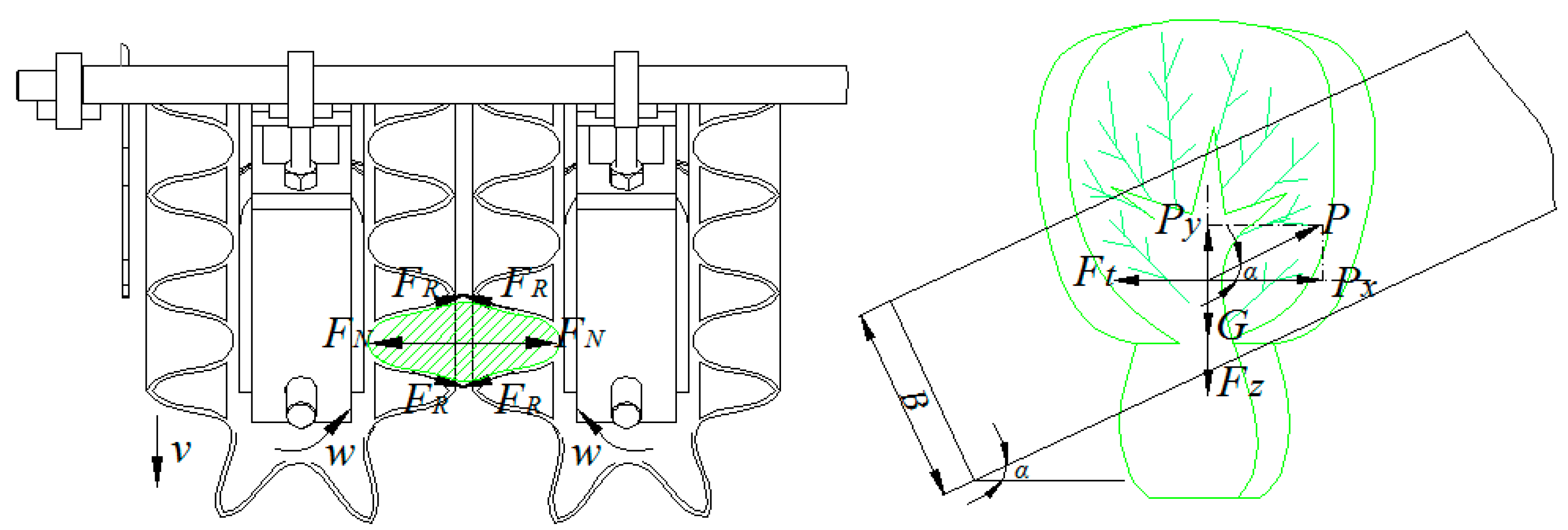
2.2. Force and Deformation Regularity of Green Leafy Vegetable Clamping Action
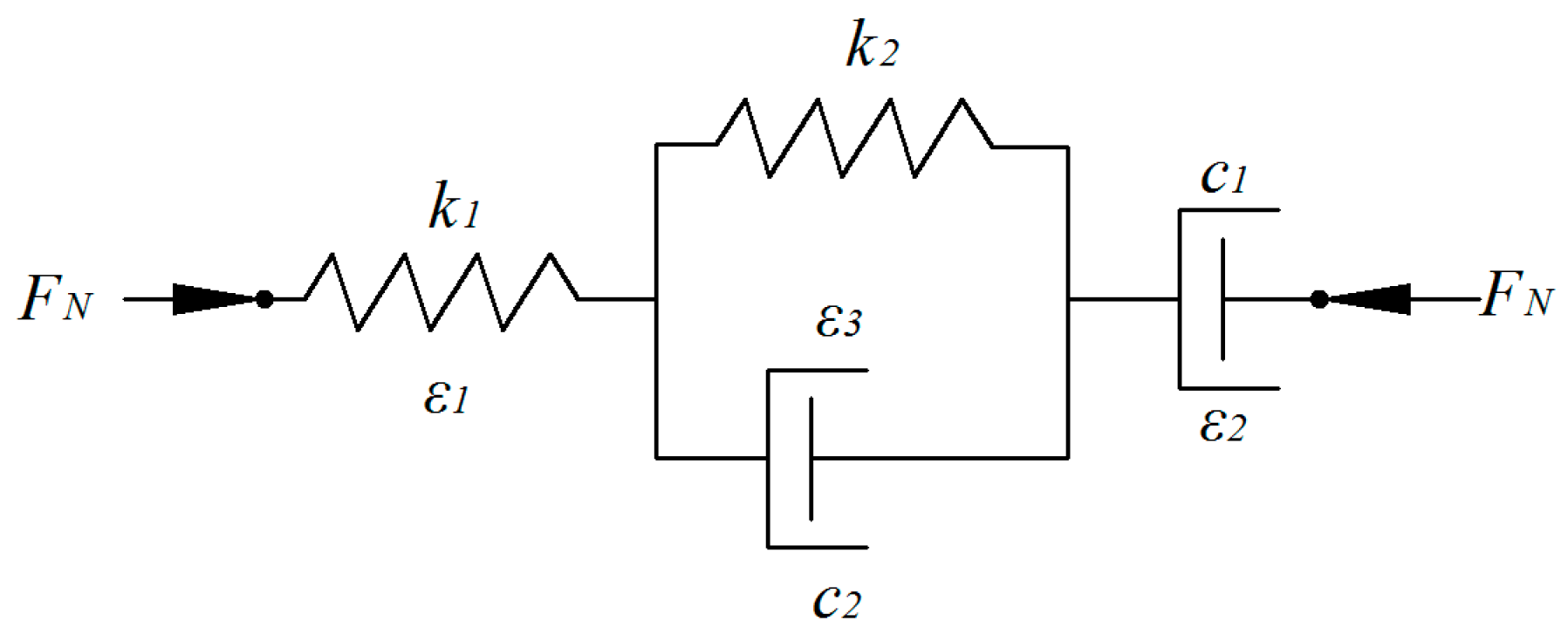
2.2.1. Green Leafy Vegetable Viscoelasticity Mathematical Model
2.2.2. Creep Experiments
2.2.3. Clamping Action Force–Deformation Model
2.2.4. Green Leafy Vegetable Plastic Deformation Damage Value Calculation
3. Analysis of Operating Parameters on Green Leafy Vegetable Damage Influence
3.1. Flexible Clamping and Conveying Device Damage Deformation Value Calculation
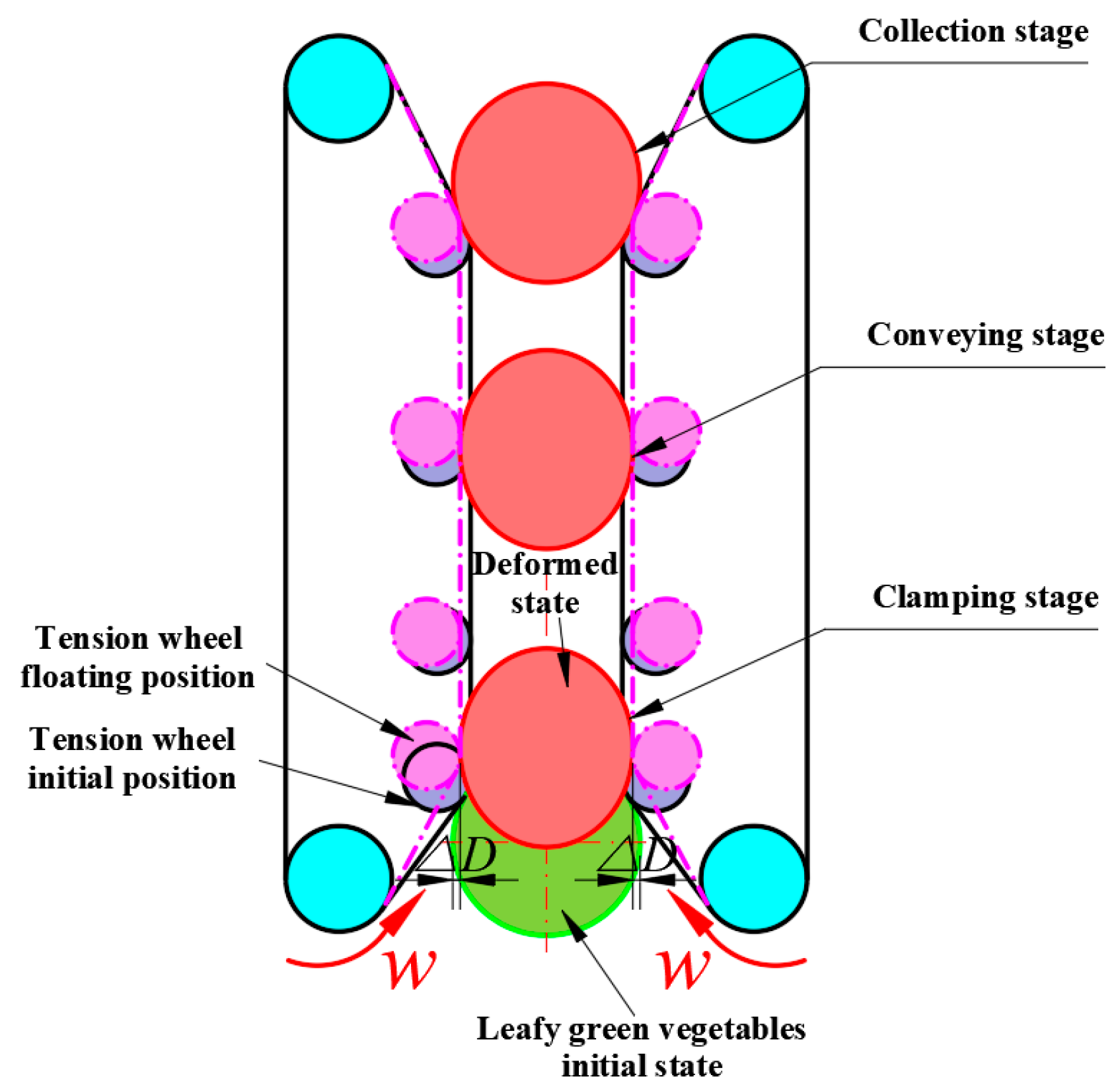
3.1.1. Green Leafy Vegetable Damage Value Calculation during the Clamping Stage
3.1.2. Green Leafy Vegetable Damage Value Calculation during the Conveying Stage
3.1.3. Green Leafy Vegetable Damage Value Calculation during the Collection Stage
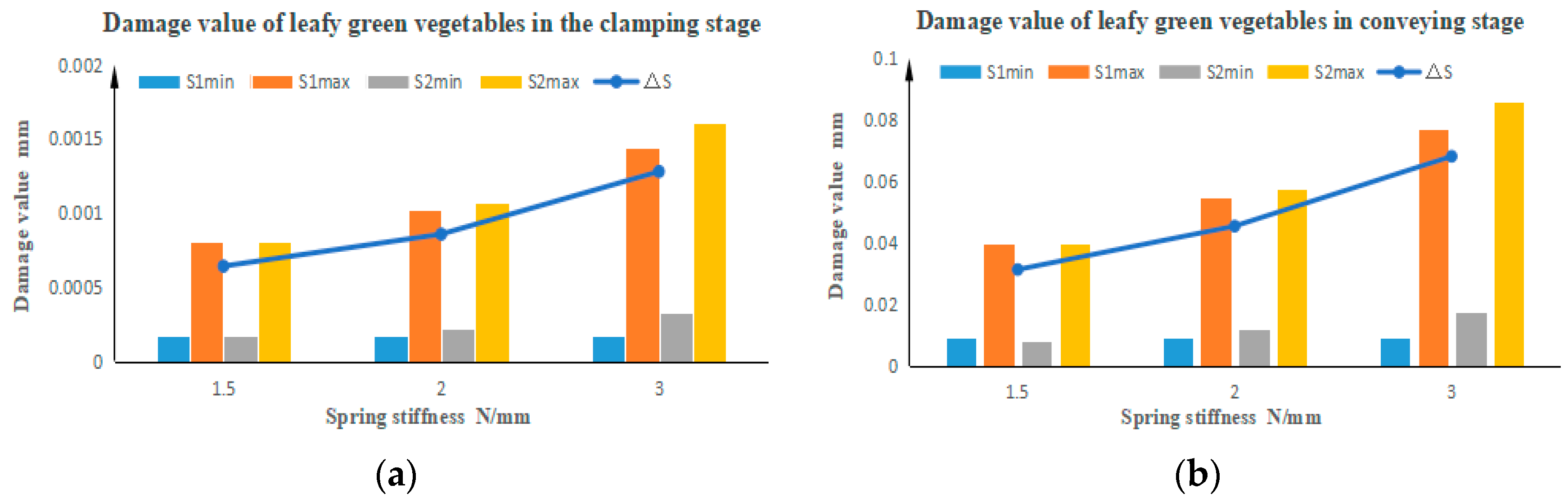
3.2. Study on Damage of Green Leafy Vegetables by Spring Stiffness and Clamping Time
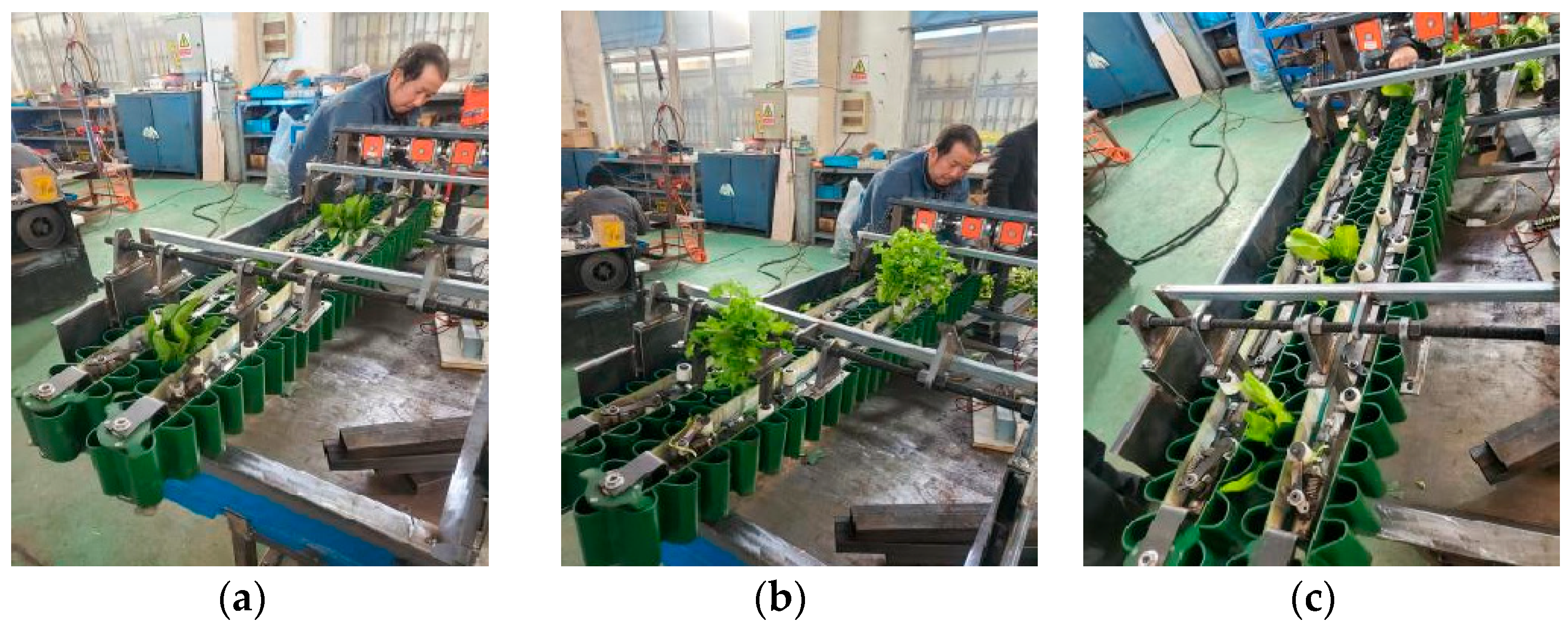
3.3. Bench Tests Study
3.3.1. Loss Rate
3.3.2. Damage Rate
4. Results and Discussion
4.1. Analysis of the Effect of Different Spring Stiffness on the Damage to Green Leafy Vegetables
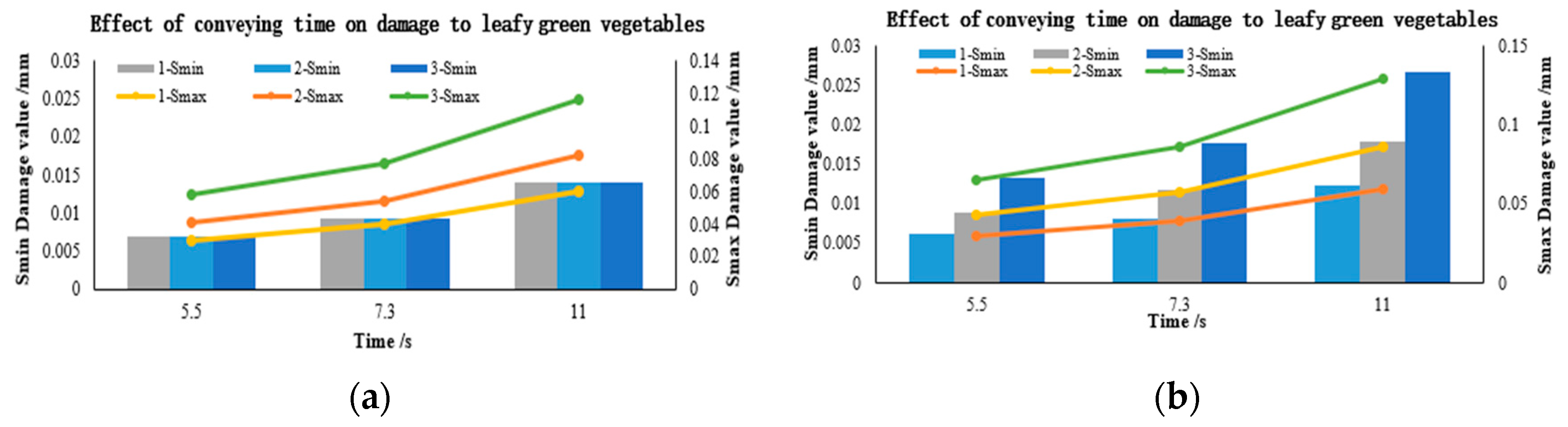
4.2. Analysis of the Effect of Different Clamping Times on the Damage to Green Leafy Vegetables
4.3. Analysis of Bench Test Results
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- China Statistical Yearbook 2023. Available online: https://www.stats.gov.cn/sj/ndsj/2023/indexch.htm (accessed on 2 February 2024).
- Chen, Y.S. Development of Vegetable Mechanization in China from 2022 to 2023. China Veg. 2023, 10, 5–10. (In Chinese) [Google Scholar]
- Jin, Y.; Xiao, H.R.; Xiao, S.W.; Xu, M.; Ding, W.Q.; Liu, D. Research Statue and Development Trendency on Leaf Vegetable Harvesting Technology and Equipment. J. Agric. Sci. Technol. 2018, 20, 72–78. (In Chinese) [Google Scholar]
- Wang, W.; Lv, X.L.; Wang, S.L.; Lu, D.P.; Yi, Z.Y. Current Status and Development of Stem and Leaf vegetable Mechanized Harvesting technology. J. China Agric. Univ. 2021, 26, 117–127. (In Chinese) [Google Scholar]
- Liu, D.; Xiao, H.R.; Jin, Y. Research Status and Development Countermeasures of Orderly Harvesting Machinery for Leafy Vegetables. Jiangsu Agric. Sci. 2019, 47, 27–31. (In Chinese) [Google Scholar]
- Jin, Y.; Xiao, H.R.; Cao, G.Q.; Song, Z.Y.; Yang, G.; Han, Y. The mechanized operation mode of the key link of stem and leafy vegetables production in China. China Veg. 2019, 7, 7–11. (In Chinese) [Google Scholar]
- Gao, L.; Yuan, Y.W.; Yi, J.G.; Kong, D.G. Revised Design and Experiment on Small Leek Harvester. Food Mach. 2016, 32, 117–119. (In Chinese) [Google Scholar]
- Xiao, H.R.; Jin, Y.; Cao, G.Q. Research on Mechanization Equipment Technology for Vegetable Production; China Agricultural Science and Technology Press: Beijing, China, 2019; pp. 55–59. [Google Scholar]
- Horticulture Technology. Available online: https://www.hortech.it/prd/rapid/ (accessed on 8 February 2024).
- Liu, D.; Xiao, H.R.; Jin, Y.; Yang, G.; Cao, G.Q.; Zhang, J.F.; Liu, M. Design and Experiment of the Orderly Harvester of Chinese Little Greens. Int. Agric. Eng. J. 2018, 27, 295–306. [Google Scholar]
- Xiao, H.R.; Jin, Y.; Wu, H.M.; Liu, D.; Yang, G. An Leafy Vegetables Orderly Harvester. CN208029477U, 2 November 2018. [Google Scholar]
- Jin, Y.; Song, Z.Y.; Zhang, J.F.; Jiang, Q.H.; Zhan, C.X.; Yang, G.; Xia, X.F.; Ren, C.H. New Light and Simple Stems and Leafy Vegetables Orderly Harvester. CN113348856B, 15 June 2021. [Google Scholar]
- Tang, Z.; Wang, H.; Liu, S.; Lu, D.P.; Tang, Y. Development of Structure and Control System of Self-Propelled Small Green Vegetables Combine Harvester. J. Agric. Sci. Technol. 2023, 25, 1045–1058. [Google Scholar]
- Zou, L.L.; Liu, X.M.; Li, J.G.; Niu, Z.R.; Song, Y.B.; Yuan, J. Clamping Conveyer Device of Ordered Spinach Harvester Based on Rheological Property Analysis. J. Agric. Mach. 2019, 50, 72–79. (In Chinese) [Google Scholar]
- Zou, L.L.; Yuan, J.; Liu, X.M.; Li, J.G.; Zhang, P.; Niu, Z.R. Burgers Viscoelastic Model-based Variable Stiffness Design of Compliant Clamping Mechanism for Leafy Greens Harvesting. Biosyst. Eng. 2021, 208, 1–15. [Google Scholar] [CrossRef]
- Shi, Y.Y.; Zhang, Y.N.; Wang, X.C.; Morice, O.O.; Sun, G.X. Design of Orderly Harvester in Stems—Leafy Vegetables Based on Pro/E. J. Agric. Mech. Res. 2017, 3, 139–143. (In Chinese) [Google Scholar]
- Shi, Y.Y.; Chen, M.; Wang, X.C.; Zhang, Y.N.; Odhiambo, M.O. Dynamic Simulation and Experiments on Artemisia Selengensis Orderly harvester Cutter. Trans. Chin. Soc. Agric. Mach. 2017, 48, 110–116. (In Chinese) [Google Scholar]
- Myhan, R.; Markowski, M.; Jachimczyk, E. A Non-linear Rheological Model of Plant Tissues. Biosyst. Eng. 2020, 190, 1–10. [Google Scholar] [CrossRef]
- Lewis, R.; Yoxall, A.; Marshall, M.B.; Canty, L.A. Characterising Pressure and Bruising in Apple Fruit. Wear 2008, 264, 37–46. [Google Scholar] [CrossRef]
- Zhou, J.; Meng, Y.M.; Zhang, N.; Yan, Z.H. Impact of Robot Grasping Control Modes on Mechanical Damage of Tomato. Trans. Chin. Soc. Agric. Mach. 2017, 48, 21–27. (In Chinese) [Google Scholar]
- Du, D.D.; Wang, J. Research on mechanics properties of crop stalks: A review. Int. J. Agric. Biol. Eng. 2016, 9, 10–19. [Google Scholar]
- Wang, J. Studies on Anisotropic Theological Properties and Dynamic Properties of Pear and Peach. Ph.D. Dissertation, Northest Agricultural University, Harbin, China, 2001. [Google Scholar]
- Tudor, C.; Daniela, I.; Marian, V.; Gheorghe, V.; Catalin, S.G. An Experimental Method for Determining the Time of Relaxation at Static Compression of Apples. J. Eng. Stud. Res. 2011, 17, 18–27. [Google Scholar]
- Ma, R.J.; Xiao, J.Q.; Zheng, P.F.; Zhang, Y.L.; Chen, Y.; Qiu, Z. Experimental Study on Characteristics of Creep and Stress Relaxation for Rice Seedling Stem Raised in Cell Tray. Trans. CSAE 2018, 34, 43–53. (In Chinese) [Google Scholar]
- Tong, X.Y.; Zheng, S.H.; Zhu, Z.; Lin, C.S.; Liang, X.; Ye, D.P. Research of Pennisetum sp. Stem Creep Characteristics Based on ADAMS. J. Chin. Agric. Mech. 2015, 36, 117–120, 133. (In Chinese) [Google Scholar]
- Yang, M.S. Rheology of Agricultural Materials; China Agriculture Press: Beijing, China, 2010; pp. 94–96. [Google Scholar]
- DG/T249-2021; Leafy Vegetable Harvester. Ministry of Agriculture and Rural Affairs of China: Beijing, China, 2021.
- Zhang, T.; Li, Y.; Song, S.M.; Pang, Y.L.; Shao, W.X.; Tang, X.L. Design and Experiment of Tumorous Stem Mustard Harvester Based on Flexible Gripping. J. Agric. Mach. 2020, 51, 162–169, 190. (In Chinese) [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Loading Force F0 | k1/(N·mm−1) | k2/(N·mm−1) | c1/(N·s·mm−1) | c2/(N·s·mm−1) | SSE | R2 |
|---|---|---|---|---|---|---|
| 6 N | 12.72 | 9.80 | 1982.45 | 95.86 | 0.0879 | 0.9991 |
| 8 N | 17.58 | 7.19 | 2394.56 | 74.31 | 0.0880 | 0.9993 |
| 10 N | 26.86 | 5.34 | 2667.12 | 57.00 | 0.0892 | 0.9994 |
| Average | 19.05 | 7.44 | 2348.04 | 75.72 | 0.0884 | 0.9993 |
| Combination | 1 | 2 | 3 |
|---|---|---|---|
| Spring stiffness/N·mm−1 | 1.5 and 0.4 | 2.0 and 0.6 | 3.0 and 0.9 |
| Item | 1 | 2 | 3 |
|---|---|---|---|
| Clamping stage time/s | 0–0.08 | 0–0.1 | 0–0.11 |
| Conveying stage time/s | 0.08–5.5 | 0.1–7.3 | 0.11–11 |
| Clamping and conveying roller speed/r·min−1 | 80 | 60 | 40 |
| Types of Green Leafy Vegetables | Shanghai Qing | Spinach | Celery | Hang Cabbage |
|---|---|---|---|---|
| Loss rate/(%) | 0.95 | 0.87 | 1.22 | 1.05 |
| Damage rate/(%) | 1.88 | 1.36 | 1.14 | 2.15 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jin, Y.; Wang, J.; Chen, J.; Song, Z.; Zhang, R.; Zhou, R. Design and Experiment for Flexible Clamping and Conveying Device for Green Leafy Vegetable Orderly Harvester. Agriculture 2024, 14, 967. https://doi.org/10.3390/agriculture14060967
Jin Y, Wang J, Chen J, Song Z, Zhang R, Zhou R. Design and Experiment for Flexible Clamping and Conveying Device for Green Leafy Vegetable Orderly Harvester. Agriculture. 2024; 14(6):967. https://doi.org/10.3390/agriculture14060967
Chicago/Turabian StyleJin, Yue, Jinwu Wang, Jia Chen, Zhiyu Song, Renlong Zhang, and Ran Zhou. 2024. "Design and Experiment for Flexible Clamping and Conveying Device for Green Leafy Vegetable Orderly Harvester" Agriculture 14, no. 6: 967. https://doi.org/10.3390/agriculture14060967