
Improving Sowing Uniformity of a Maize High-Speed Precision Seeder by Incorporating Energy Dissipator
Abstract
:1. Introduction
2. Materials and Methods
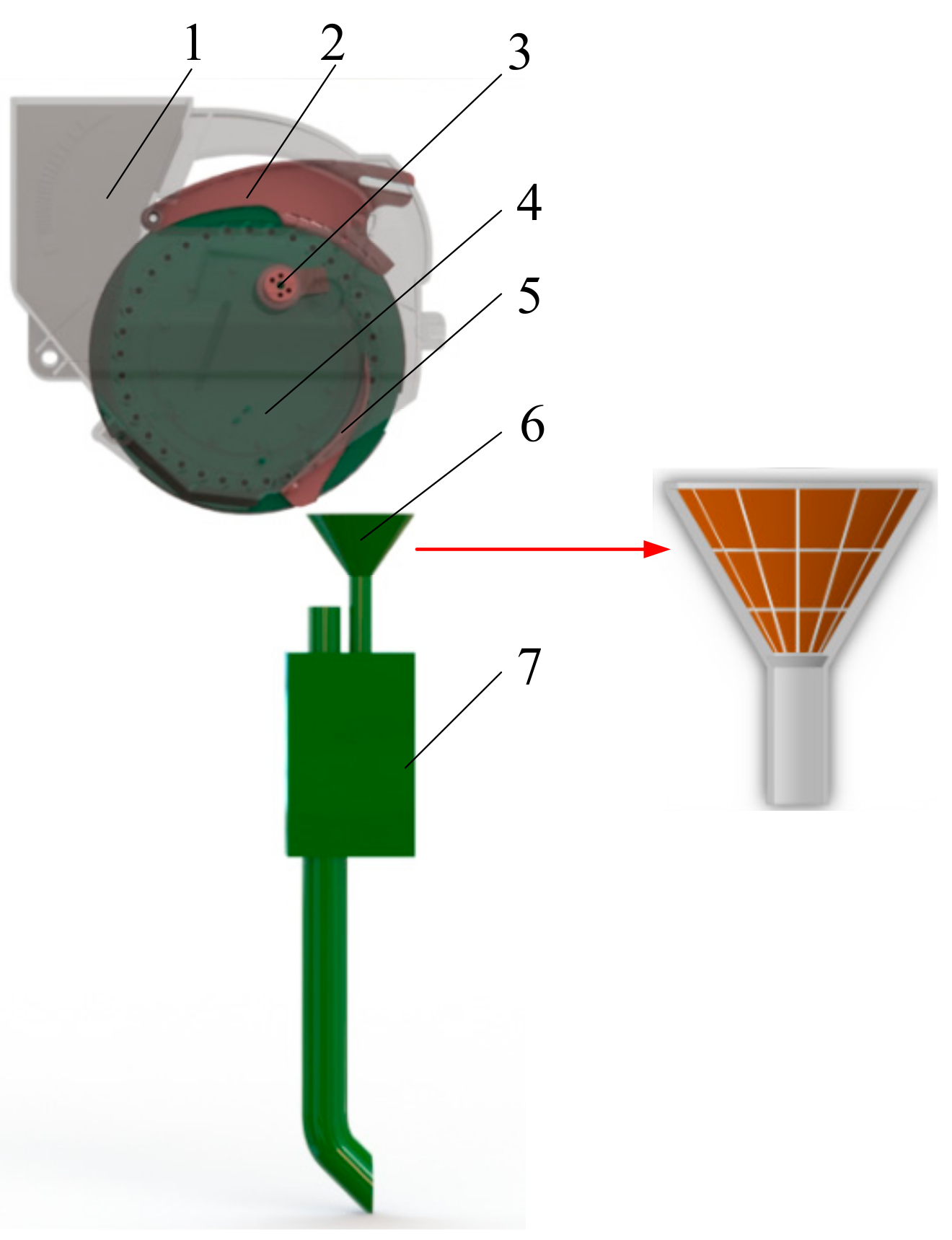
2.1. Seed Transport System of High-Speed Vacuum Seeder
2.2. Effect of Seed-Throwing Process on Qualified Rate of Grain Distance
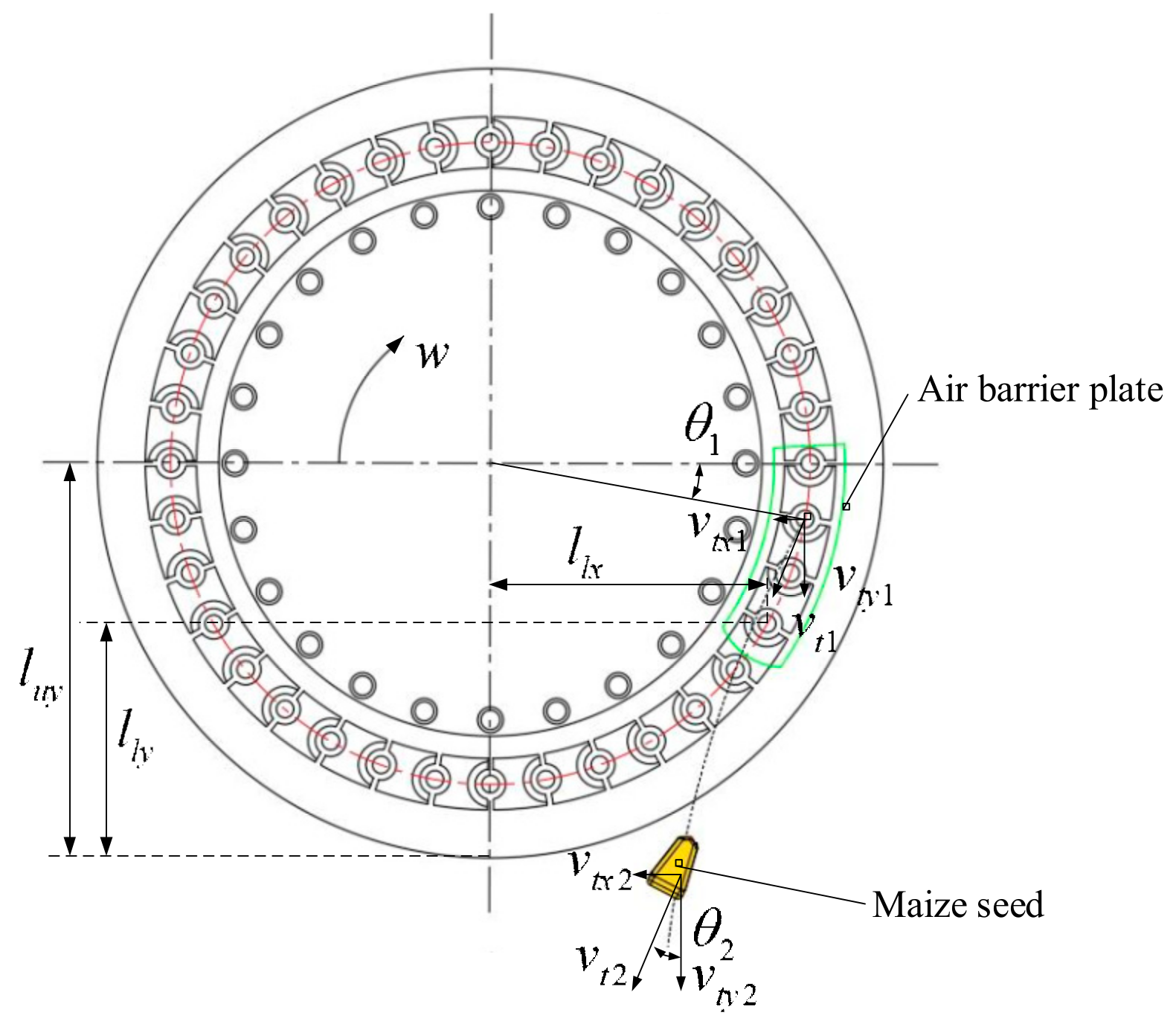
2.2.1. Motion Analysis in the Initial Stage of Seed-Throwing
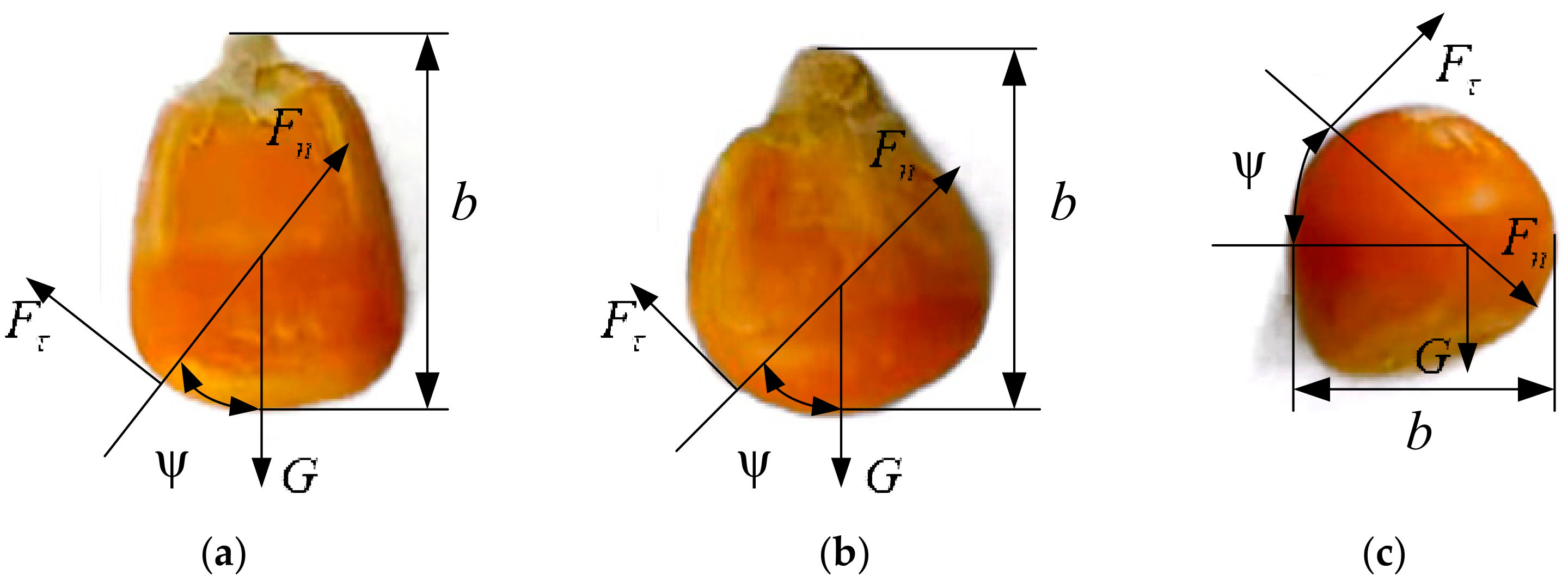
2.2.2. Analysis of Seed Collision Motion
2.3. Design of Energy-Dissipation Device and Principle of Seed Energy Dissipation
2.3.1. Design of Energy-Dissipation Device
2.3.2. Theoretical Model of Seed Energy Dissipation
2.4. Preparation of Experimental Materials
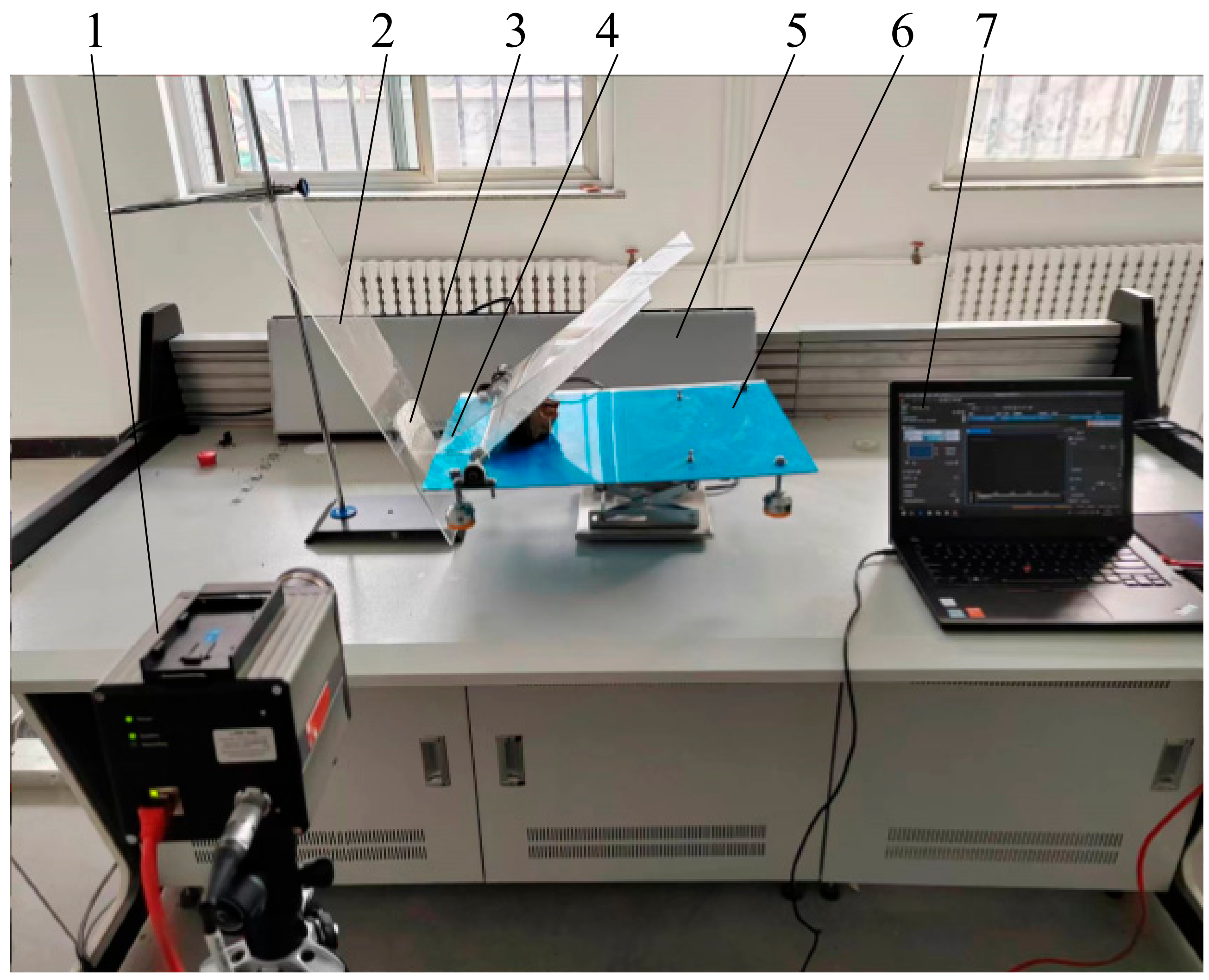
2.5. Test Bench
2.6. Field Experiments
2.7. Experimental Scheme and Evaluation Index
2.7.1. Evaluation Index
2.7.2. One Factor and Multifactor Experimental Design
2.7.3. Orthogonal Experimental Design
3. Results and Discussion
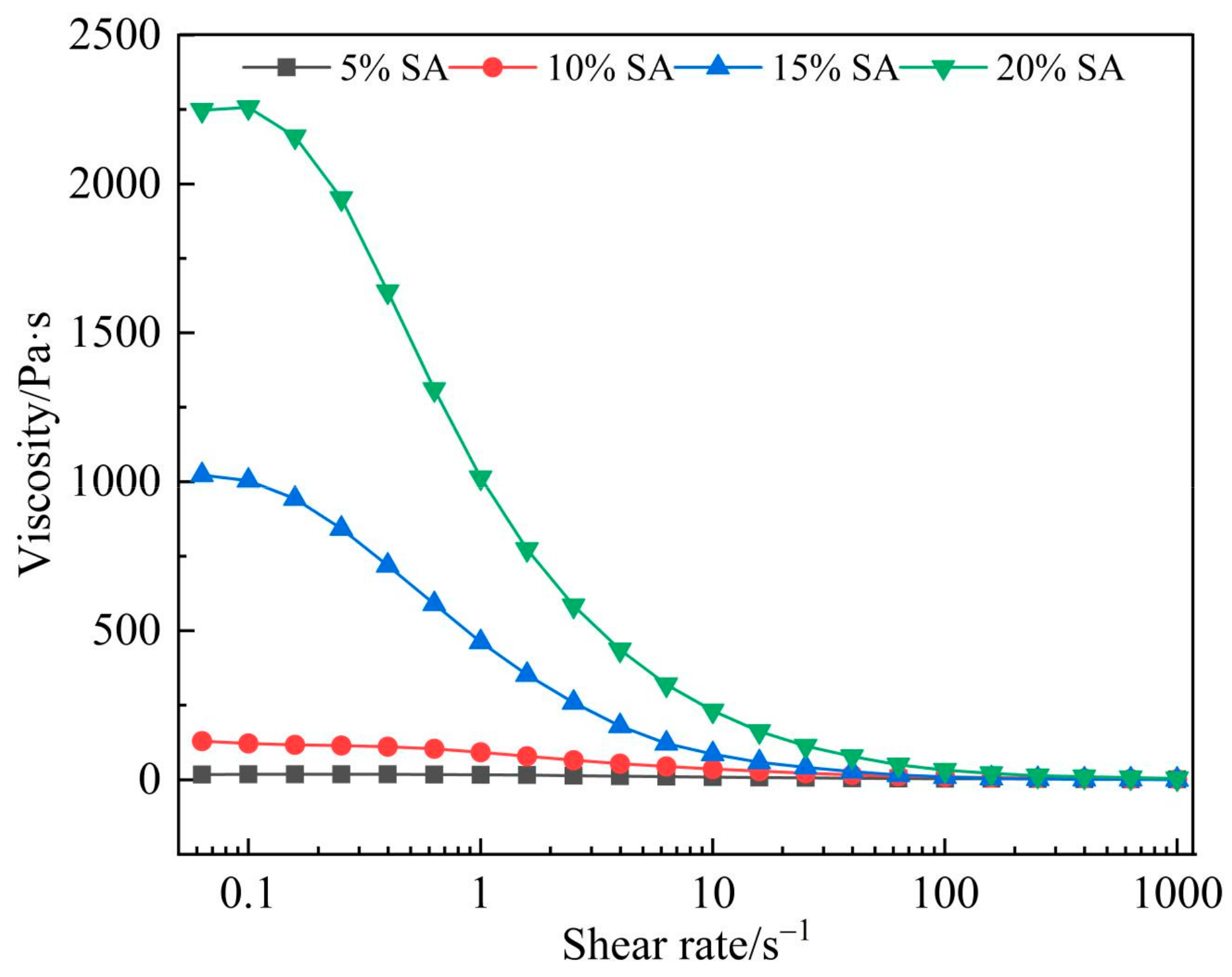
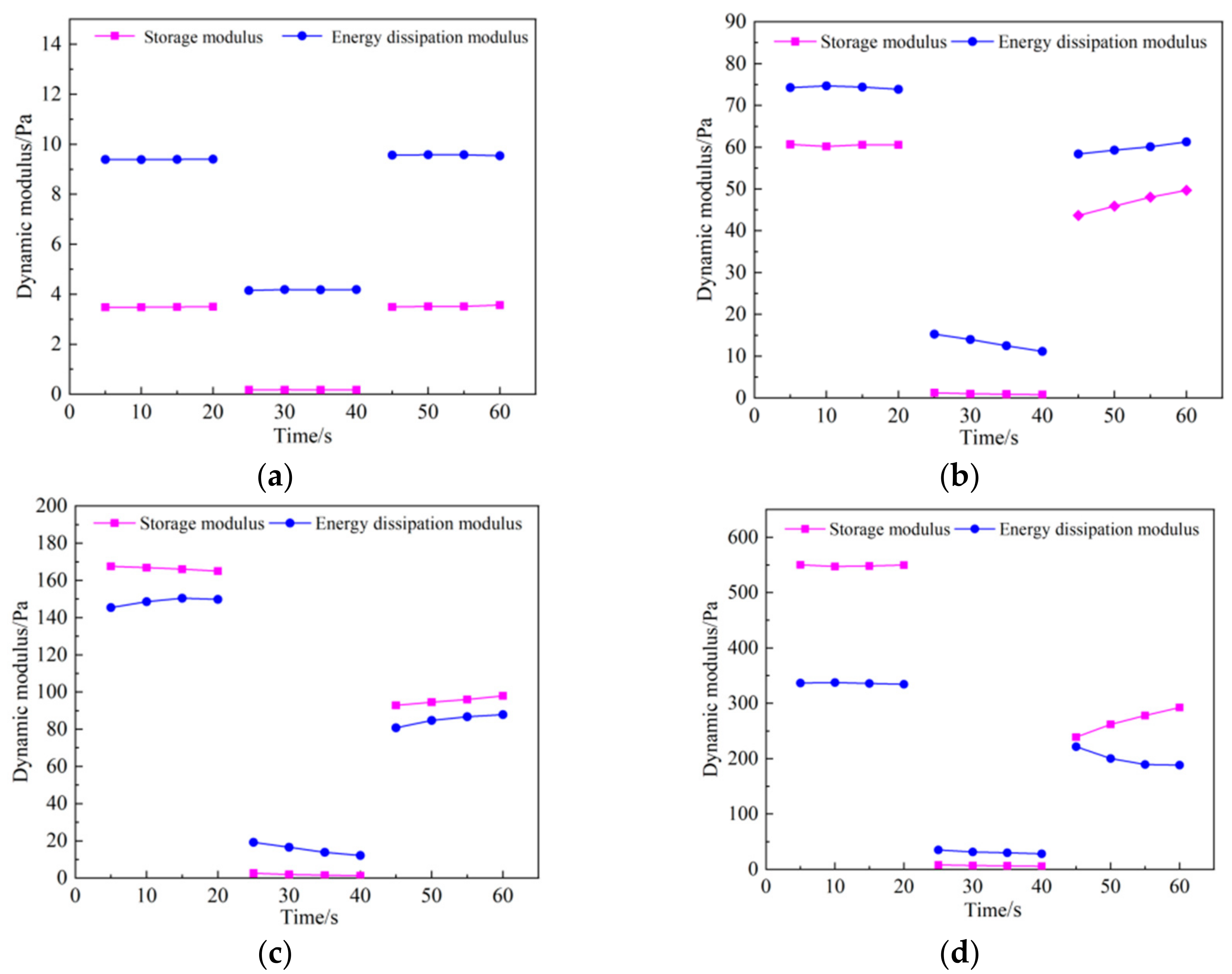
3.1. Analysis of Rheological Property of Shear-Thinning Fluid
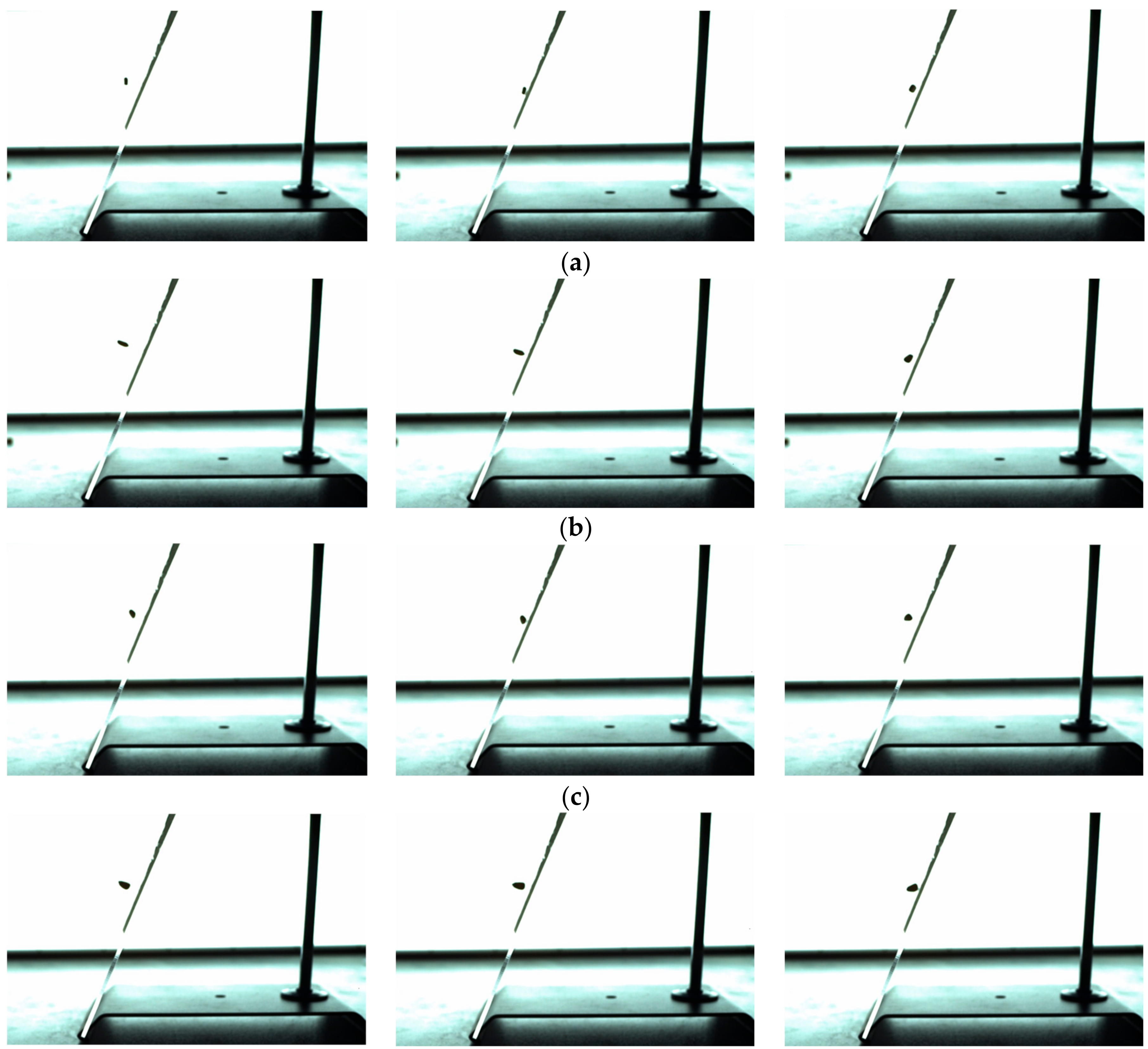
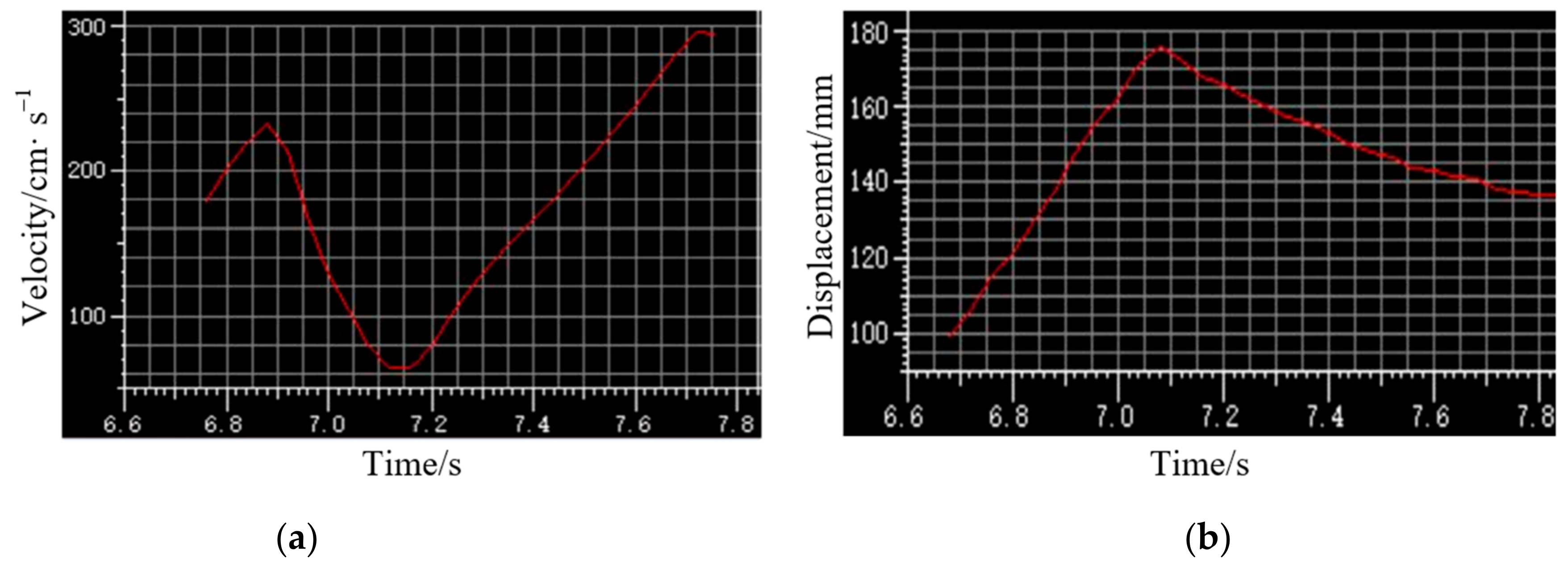
3.2. Analysis of the Seed Energy-Dissipation Process
3.2.1. Feasibility of the Seed Energy Dissipation
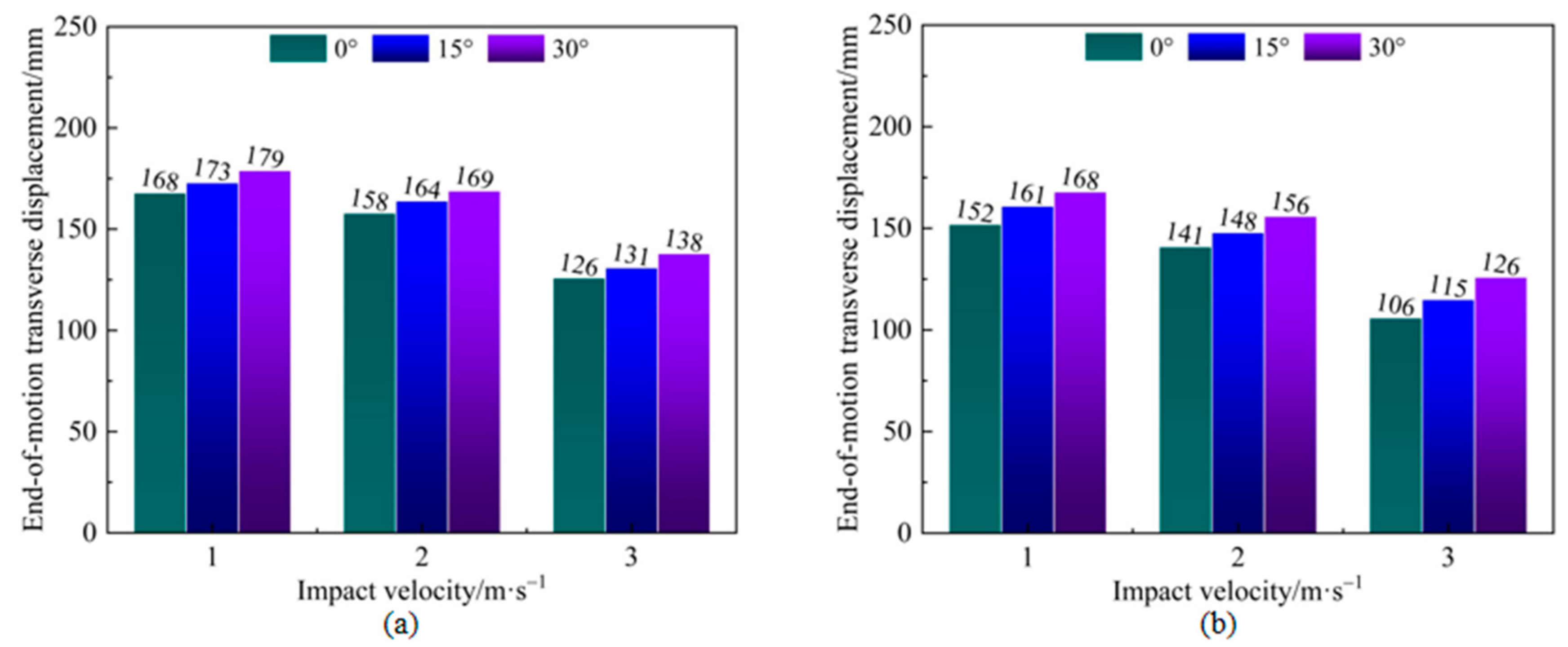
3.2.2. Influence of Experimental Factors on Energy-Dissipation Process
3.3. Optimization of Energy Dissipator
3.3.1. Analysis of Variance and Establishment of Regression Model
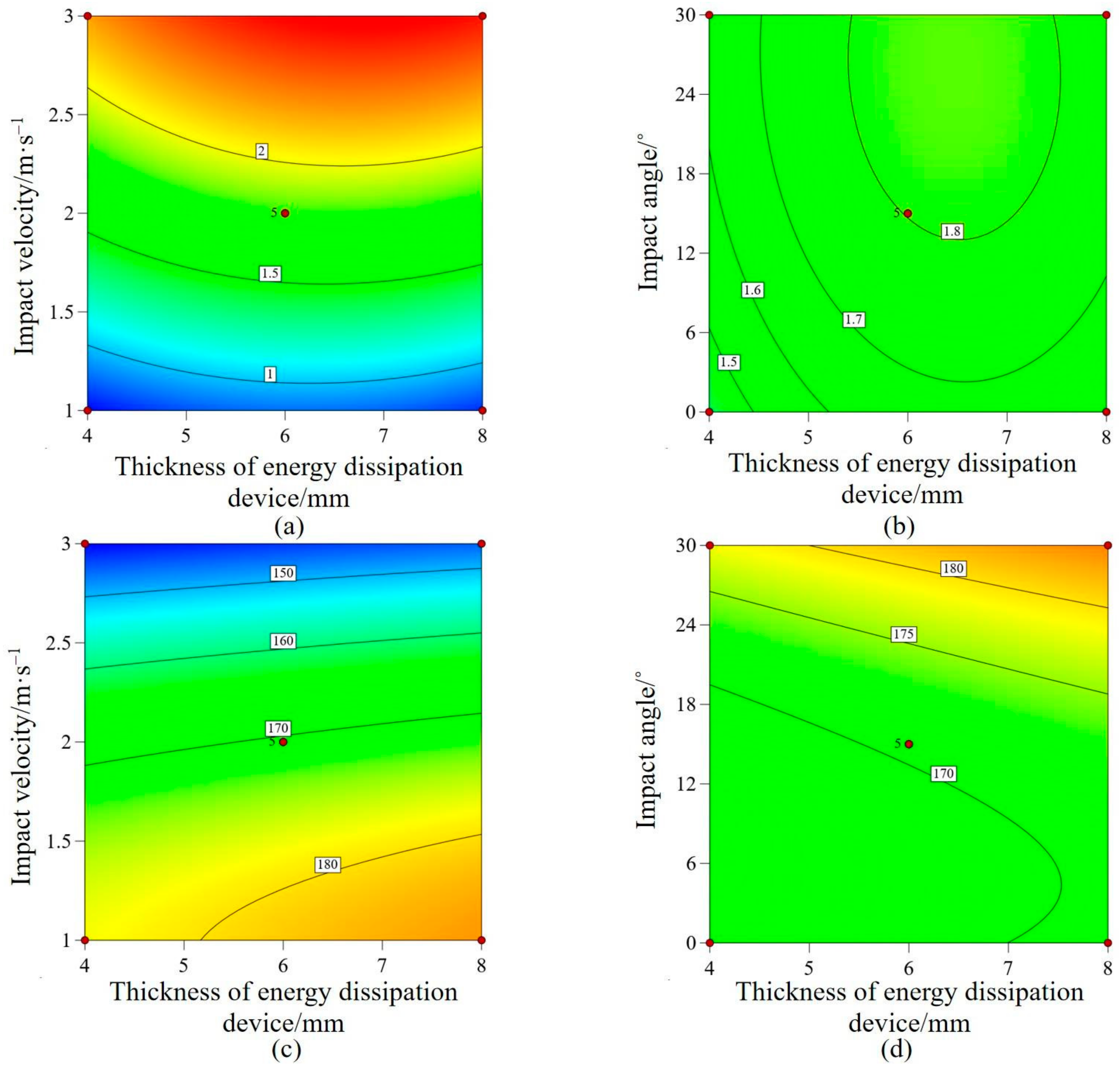
3.3.2. Analysis of the Influence Effect of Energy Dissipator Thickness
3.3.3. Parameter Optimization and Experimental Validation
3.4. Analysis of Field Experiment Results
4. Conclusions
- (1)
- Seed-throwing in an unconstrained state and seed impact with the wall of the seed-guiding device results in poor sowing uniformity of the seeder under high-speed working.
- (2)
- The mass fraction of the fluid dispersed phase significantly influenced the energy dissipation and flexible undertaking. The results of rheological performance experiments show that the rheological properties of 10% SA and 15% SA fluids are similar. Both fluids exhibit good energy absorption and strong deformation recovery ability.
- (3)
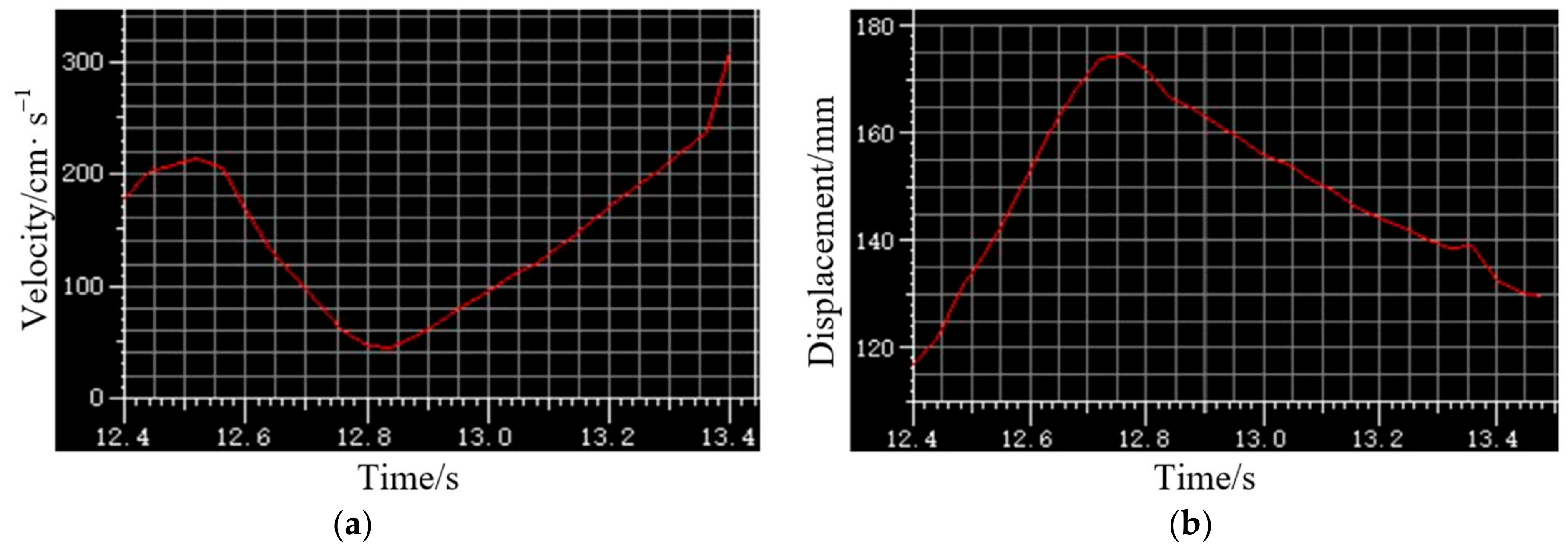
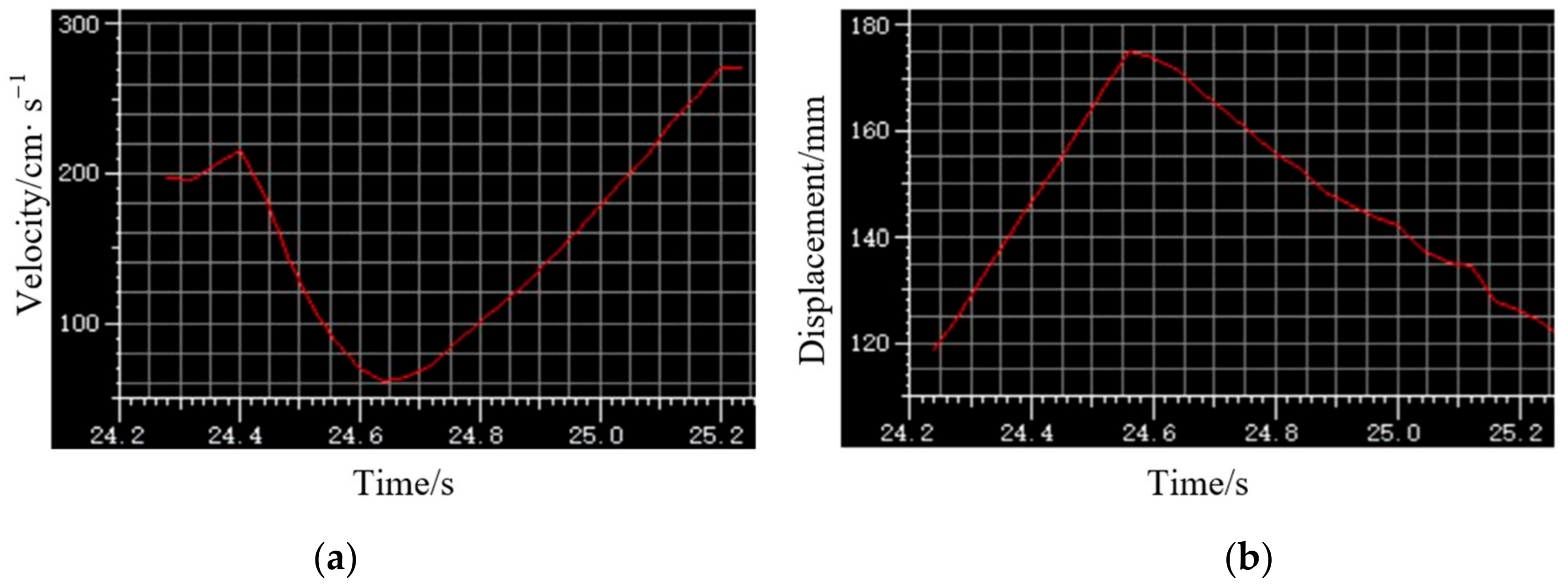
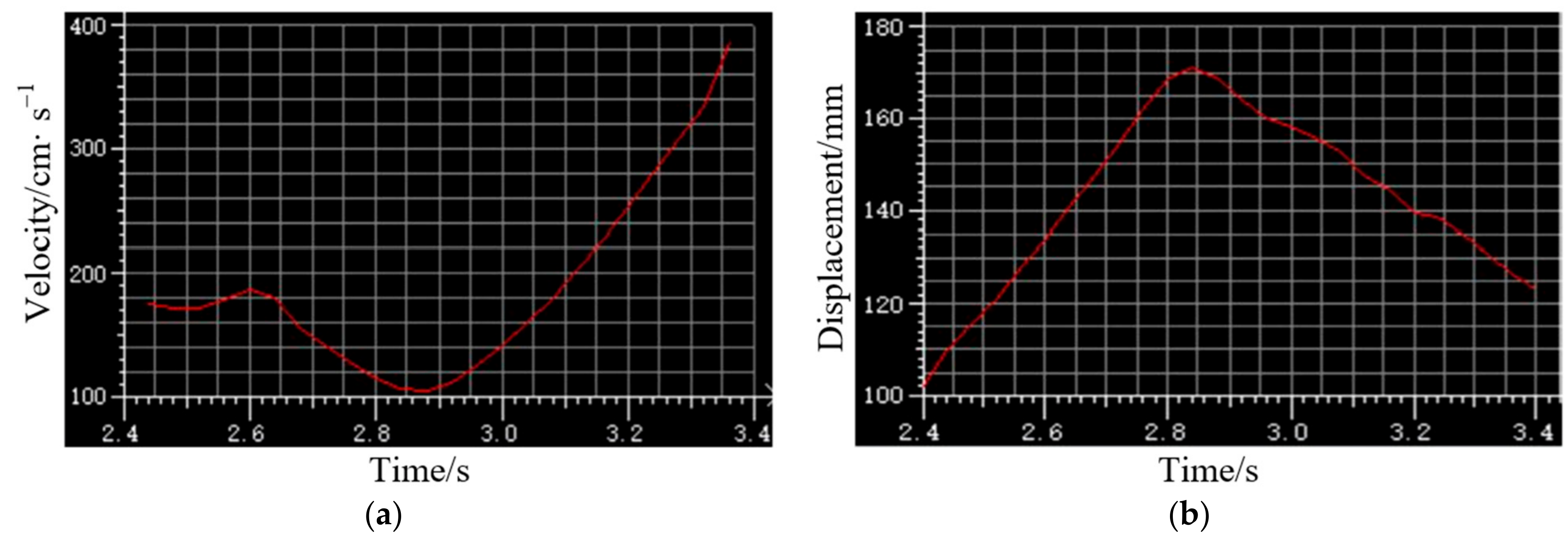
- The motion posture, velocity, and displacement of the seed energy-dissipation process are evaluated, and it is determined that the material of the energy dissipator is the colloid with an SA percentage of 10%.
- (4)
- The thickness of the energy dissipator was determined to be 7 mm through regression orthogonal experiments and parameter optimization. The results of the validation experiments show that when the impact velocity was 1~3 m·s−1, the pre-and post-impact velocity difference was 0.71~2.41 m·s−1, the absorption ratio of seed velocity was 71~80.3%, indicating a better energy-dissipation effect.
- (5)
- The field experiment results prove that the high-speed vacuum seed transport system could work continuously and stably. When the working speed was 12~16 km·h−1, the leakage rate was less than 6.83%, the multiple rate was less than 0.97%, the qualified rate was stable at more than 92.40%, and the qualified grain distance variation rate was stable at less than 16.57%, which proves that the energy-dissipation device is beneficial for improving the overall working performance of high-speed precision seeder. In the future, the dynamics of seed movement, as they fall into the seed furrow, will be studied in detail, with the aim of enhancing the application of the energy-dissipation device in practical agricultural production.
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Conflicts of Interest
References
- Kus, E. Evaluation of some operational parameters of a vacuum single-seed planter in maize sowing. J. Agric. Sci. Tarim Bilim. Derg. 2021, 27, 327–334. [Google Scholar]
- Yatskul, A.L.; Lemiere, J.P. Establishing the conveying parameters required for the air-seeders. Biosyst. Eng. 2018, 166, 1–12. [Google Scholar] [CrossRef]
- Yang, L.; He, X.T.; Tao, C.; Zhang, D.X.; Song, S.; Rui, Z.; Mantao, W. Development of mechatronic driving system for seed meters equipped on conventional precision corn planter. Int. J. Agric. Biol. Eng. 2015, 8, 1–9. [Google Scholar]
- Ding, Y.Q.; He, X.T.; Yang, L.; Zhang, D.X.; Cui, T.; Li, Y.H.; Zhong, X.J.; Xie, C.J.; Du, Z.H.; Yu, T.C. Low-cost turn compensation control system for conserving seeds and increasing yields from maize precision planters. Comput. Electron. Agric. 2022, 199, 107118. [Google Scholar] [CrossRef]
- Han, D.; Zhang, D.; Jing, H.; Yang, L.; Cui, T.; Ding, Y.; Wang, Z.; Wang, Y.; Zhang, T. DEM-CFD coupling simulation and optimization of an inside-filling air-blowing maize precision seed-metering device. Comput. Electron. Agric. 2018, 150, 426–438. [Google Scholar] [CrossRef]
- Pareek, C.M.; Tewari, V.K.; Machavaram, R. Multi-objective optimization of seeding performance of a pneumatic precision seed metering device using integrated ANN-MOPSO approach. Eng. Appl. Artif. Intell. 2023, 117, 105559. [Google Scholar] [CrossRef]
- Liu, Q.W.; He, X.T.; Yang, L.; Zhang, D.X.; Cui, T.; Qu, Z.; Yan, B.X.; Wang, M.T.; Zhang, T.L. Effect of travel speed on seed spacing uniformity of corn seed meter. Int. J. Agric. Biol. Eng. 2017, 10, 98–106. [Google Scholar]
- Shi, S.; Zhou, J.; Liu, H.; Fang, H.; Jian, S.; Zhang, R. Design and experiment of pneumatic precision seed-metering device with guided assistant seed-filling. Trans. Chin. Soc. Agric. Mach. 2019, 50, 61–70, (In Chinese with English Abstract). [Google Scholar]
- Sola. Proesm-K. Available online: https://solagrupo.com/es/pr/sembradoras-monograno/prosem-k-variant-manual-fija-Prosem%20K%20Variant%20manual%20fija-11 (accessed on 21 June 2024).
- Maschio. Chrono700. Available online: https://www.maschio.com/en/web/international/chrono-700 (accessed on 21 June 2024).
- Kinze. 3505Planter. Available online: https://www.kinze.com/planters/3505-planter/ (accessed on 21 June 2024).
- Vaderstad. TempoR. Available online: https://www.vaderstad.com/ca-en/planting/tempo-planter/powershoot/ (accessed on 21 June 2024).
- Liu, R.; Liu, L.J.; Li, Y.J.; Liu, Z.J.; Zhao, J.H.; Liu, Y.Q.; Zhang, X.D. Numerical simulation of seed-movement characteristics in new maize delivery device. Agriculture 2022, 12, 1944. [Google Scholar] [CrossRef]
- Liu, R.; Liu, L.J.; Li, Y.J.; Liu, Z.J.; Zhao, J.H.; Liu, Y.Q.; Zhang, X.D. Design and experiment of corn high speed air suction seed metering device with disturbance assisted seed-filling. Trans. Chin. Soc. Agric. Mach. 2022, 53, 50–59, (In Chinese with English Abstract). [Google Scholar]
- Li, Y.; Yang, L.; Zhang, D.; Cui, T.; Zhang, K.; Xie, C.; Yang, R. Analysis and test of linear seeding process of maize high speed precision metering device with air suction. Trans. Chin. Soc. Agric. Eng. 2020, 36, 26–35, (In Chinese with English Abstract). [Google Scholar]
- Zhao, S.; Chen, J.; Wang, J.; Chen, J.; Yang, C.; Yang, Y. Design and Experiment on V-groove dialing round type guiding-seed device. Trans. Chin. Soc. Agric. Mach. 2018, 49, 146–158, (In Chinese with English Abstract). [Google Scholar]
- Gao, Z.; Lu, C.Y.; Li, H.W.; He, J.; Wang, Q.J.; Huang, S.H.; Li, Y.X.; Zhan, H.M. Measurement method of collision restitution coefficient between corn seed and soil based on the collision dynamics theory of mass point and fixed surface. Agriculture 2023, 12, 1611. [Google Scholar] [CrossRef]
- Li, H.; Li, Y.; Tang, Z.; Xu, L.; Zhao, Z. Numerical simulation and analysis of vibration screening based on EDEM. Trans. Chin. Soc. Agric. Eng. 2011, 27, 117–121, (In Chinese with English Abstract). [Google Scholar]
- Li, X.P.; Zhang, W.T.; Xu, S.D.; Ma, F.L.; Du, Z.; Ma, Y.D.; Liu, J. Calibration of collision recovery coefficient of corn seeds based on high-speed photography and sound waveform analysis. Agriculture 2023, 13, 1677. [Google Scholar] [CrossRef]
- Wojtkowski, M.; Pecen, J.; Horabik, J.; Molenda, M. Rapeseed impact against a flat surface: Physical testing and DEM simulation with two contact models. Powder Technol. 2010, 198, 61–68. [Google Scholar] [CrossRef]
- Li, J.; Su, N.; Hu, J.; Yang, Z.; Sheng, L.; Zhang, X. Numerical analysis and experiment of abrasive flow machining microhole structure based on CFD-DEM coupling. Trans. Chin. Soc. Agric. Eng. 2018, 34, 80–88, (In Chinese with English Abstract). [Google Scholar]
- Chen, Y.; Geng, R.; Ma, L. Design and selection of fluid viscous devices for shock control of bridges. China Civ. Eng. J. 2007, 40, 55–61, (In Chinese with English Abstract). [Google Scholar]
- Elsinawi, A.H.; Jhemi, A.; Alhamaydeh, M. Adaptive seismic isolation of structures using MR-fluid dampers. In Proceedings of the 2013 5th International Conference on Modeling, Simulation and Applied Optimization, ICMSAO 2013, Hammamet, Tunisia, 28–30 April 2013. [Google Scholar]
- Jia, J.; Shen, X.; Du, J.; Wang, Y.; Hua, H. Design and experimental research on fluid viscous dampers. Chin. J. Mech. Eng. 2008, 44, 194–198, (In Chinese with English Abstract). [Google Scholar] [CrossRef]
- Park, B.; Lee, Y.; Park, M.; Ju, Y.K. Vibration control of a structure by a tuned liquid column damper with embossments. Eng. Struct. 2018, 168, 290–299. [Google Scholar] [CrossRef]
- Zhang, C.-H.; Wang, Y.; Du, J.-Y.; Wen, Z.-D. Effect of power-law fluid damping in a shock isolation system. J. Ship Mech. 2015, 19, 975–981, (In Chinese with English Abstract). [Google Scholar]
- Ma, J.; Liu, D.; Chen, X. Experimental study of oblique impact between dry spheres and liquid layers. Phys. Rev. E Stat. Nonlinear Soft Matter Phys. 2013, 88, 033018. [Google Scholar] [CrossRef] [PubMed]
- Ma, J.; Liu, D.; Chen, Z.; Chen, X. Agglomeration characteristics during fluidized bed combustion of salty wastewater. Powder Technol. 2014, 253, 537–547. [Google Scholar] [CrossRef]
- Lee, K.Y.; Mooney, D.J. Alginate: Properties and biomedical applications. Prog. Polym. Sci. 2012, 37, 106–126. [Google Scholar] [CrossRef]
- Zhu, J.; Marchant, R.E. Design properties of hydrogel tissue-engineering scaffolds. Expert Rev. Med. Devices 2011, 8, 607–626. [Google Scholar] [CrossRef]
- Li, W.C.; Qiao, K.; Zheng, Y.D.; Yan, Y.; Xie, Y.J.; Liu, Y.; Ren, H.M. Preparation, mechanical properties, fatigue and tribological behavior of duble crosslinked high strength hydrogel. J. Mech. Behav. Biomed. Mater. 2022, 126, 105009. [Google Scholar] [CrossRef] [PubMed]
- Ling, L.; Wu, G.W.; Wen, C.K.; Xiao, Y.J.; Fu, W.Q.; Dong, J.J.; Ding, J.H.; Meng, Z.J.; Yan, B.X. Influence of speed measurement method on performance of an electric-drive maize precision planter. Biosyst. Engineering. 2024, 238, 175–187. [Google Scholar] [CrossRef]
- Wittmer, J.P.; Xu, H.; Benzerara, O.; Baschnagel, J. Fluctuation-dissipation relation between shear stress relaxation modulus and shear stress autocorrelation function revisited. Mol. Phys. 2015, 113, 2881–2893. [Google Scholar] [CrossRef]
- Li, Y.; Yang, L.; Zhang, D.; Cui, T.; He, X.; Du, Z.; Wang, D. Performance analysis and structure optimization of the maize precision metering device with air suction at high-speed condition. Trans. Chin. Soc. Agric. Eng. 2022, 38, 1–11. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Level | Factors | ||
|---|---|---|---|
| Mass Fraction of Dispersed Phase in Fluid/% | Impact Velocity/m·s−1 | Impact Angle/° | |
| 1 | 10 | 1 | 0 |
| 2 | 15 | 2 | 15 |
| 3 | 3 | 30 | |
| Level | Factors | ||
|---|---|---|---|
| Thickness of Energy Dissipator E/mm | Impact Velocity F/m·s−1 | Impact Angle W/° | |
| −1 | 4 | 1 | 0 |
| 0 | 6 | 2 | 15 |
| 1 | 8 | 3 | 30 |
| Number | Thickness of Energy Dissipator E/(mm) | Impact Velocity F/(m·s−1) | Impact Angle W/(degree) | Pre- and Post-Impact Velocity Difference y1/(m·s−1) | Value of Transverse Displacement at the End of the Movement y2/(mm) |
|---|---|---|---|---|---|
| 1 | −1 | 0 | −1 | 1.44 | 167 |
| 2 | −1 | 0 | 1 | 1.62 | 178 |
| 3 | 1 | 1 | 0 | 2.45 | 145 |
| 4 | 1 | 0 | 1 | 1.73 | 185 |
| 5 | −1 | 1 | 0 | 2.18 | 141 |
| 6 | 0 | 1 | −1 | 2.33 | 142 |
| 7 | 0 | 0 | 0 | 1.78 | 169 |
| 8 | 0 | 0 | 0 | 1.86 | 172 |
| 9 | 0 | −1 | −1 | 0.68 | 180 |
| 10 | −1 | −1 | 0 | 0.65 | 179 |
| 11 | 0 | 0 | 0 | 1.81 | 166 |
| 12 | 0 | 1 | 1 | 2.47 | 156 |
| 13 | 1 | −1 | 0 | 0.74 | 184 |
| 14 | 0 | 0 | 0 | 1.82 | 175 |
| 15 | 0 | 0 | 0 | 1.74 | 171 |
| 16 | 0 | −1 | 1 | 0.91 | 191 |
| 17 | 1 | 0 | −1 | 1.59 | 171 |
| Source of Variation | y1/(m·s−1) | y1/(mm) | ||||||
|---|---|---|---|---|---|---|---|---|
| SS | DF | F | P | SS | DF | F | P | |
| Model | 5.54 | 9.00 | 441.51 | <0.0001 ** | 3453.24 | 9.00 | 57.70 | <0.0001 ** |
| E | 0.05 | 1.00 | 34.48 | 0.0006 ** | 50.00 | 1.00 | 7.34 | 0.03 * |
| F | 5.20 | 1.00 | 3731.64 | <0.0001 ** | 2812.50 | 1.00 | 412.74 | <0.0001 ** |
| W | 0.06 | 1.00 | 42.71 | 0.0003 ** | 312.50 | 1.00 | 45.86 | 0.0003 ** |
| EF | 8.1 × 10−3 | 1.00 | 5.81 | 0.00467 ** | 0.25 | 1.00 | 0.03 | 0.8535 |
| EW | 4.0 × 10−4 | 1.00 | 0.29 | 0.608 | 2.25 | 1.00 | 0.33 | 0.5835 |
| FW | 2.0 × 10−3 | 1.00 | 1.45 | 0.267 | 2.25 | 1.00 | 0.33 | 0.5835 |
| E2 | 0.09 | 1.00 | 67.75 | <0.0001 ** | 0.13 | 1.00 | 0.33 | 0.8945 |
| F2 | 0.09 | 1.00 | 65.51 | <0.0001 ** | 281.39 | 1.00 | 0.02 | 0.0004 ** |
| W2 | 0.01 | 1.00 | 9.9 | 0.0162 * | 98.02 | 1.00 | 41.29 | 0.0068 ** |
| Lack of fit | 1.67 × 10−3 | 3.00 | 0.28 | 0.84 | 2.50 | 3.00 | 14.39 | 0.971 |
| Pure error | 8.1 × 10−3 | 4.00 | 441.51 | <0.0001 | ||||
| Total | 5.55 | 16.00 | ||||||
| Impact Velocity/(m·s−1) | Impact Angle/(°) | Thickness/(mm) | y1/(m·s−1) | y2/(mm) | |||
|---|---|---|---|---|---|---|---|
| Predicted Value | Measured Value | Predicted Value | Measured Value | Predicted Value | Measured Value | ||
| 1 | 0 | 6.3 | 7.0 | 0.68 | 0.71 | 180.8 | 173.0 |
| 2 | 0 | 6.6 | 7.0 | 1.46 | 1.48 | 169.7 | 164.0 |
| 3 | 0 | 6.9 | 7.0 | 2.36 | 2.41 | 142.1 | 137.0 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, R.; Wu, G.; Dong, J.; Yan, B.; Meng, Z. Improving Sowing Uniformity of a Maize High-Speed Precision Seeder by Incorporating Energy Dissipator. Agriculture 2024, 14, 1237. https://doi.org/10.3390/agriculture14081237
Liu R, Wu G, Dong J, Yan B, Meng Z. Improving Sowing Uniformity of a Maize High-Speed Precision Seeder by Incorporating Energy Dissipator. Agriculture. 2024; 14(8):1237. https://doi.org/10.3390/agriculture14081237
Chicago/Turabian StyleLiu, Rui, Guangwei Wu, Jianjun Dong, Bingxin Yan, and Zhijun Meng. 2024. "Improving Sowing Uniformity of a Maize High-Speed Precision Seeder by Incorporating Energy Dissipator" Agriculture 14, no. 8: 1237. https://doi.org/10.3390/agriculture14081237