
Header Height Detection and Terrain-Adaptive Control Strategy Using Area Array LiDAR

 and
and
Abstract
:1. Introduction
2. Materials and Methods
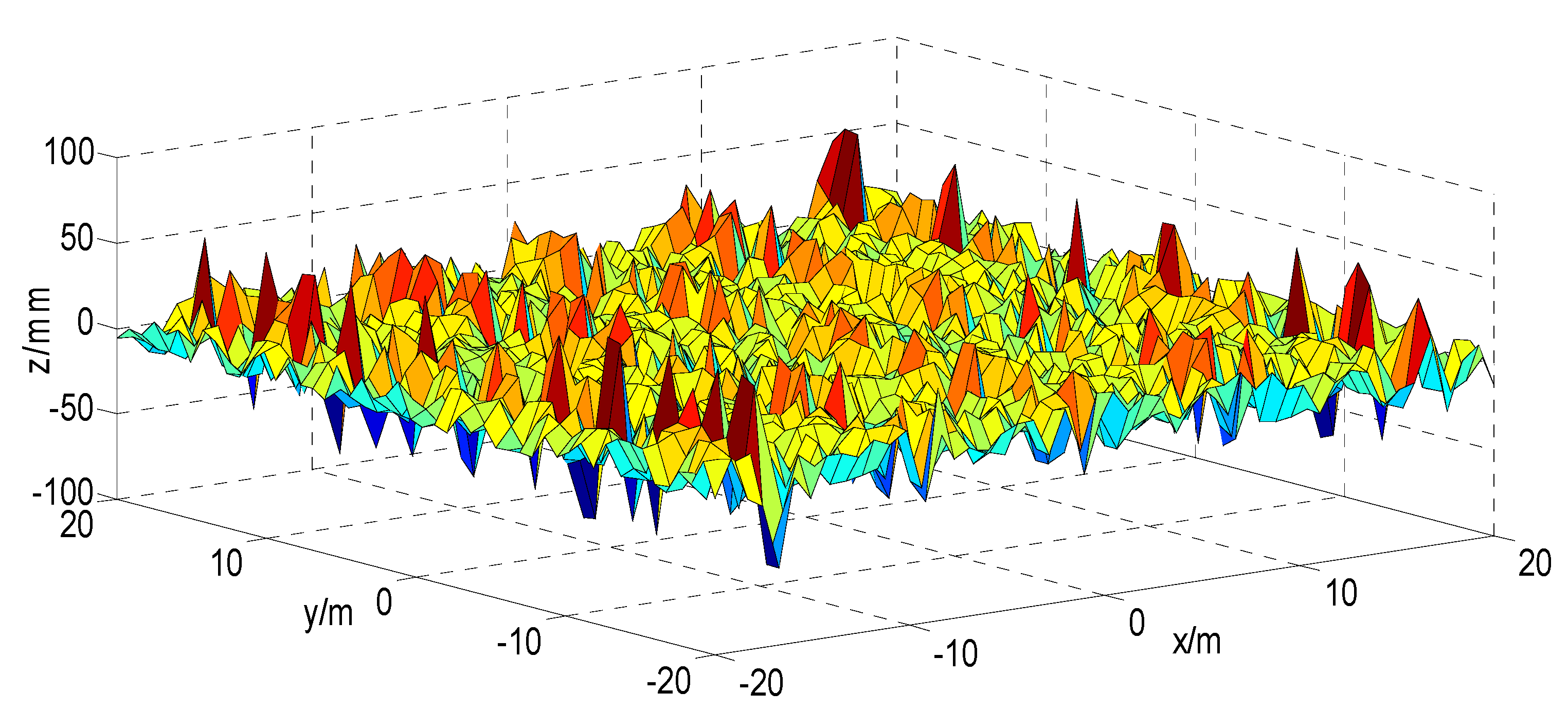
2.1. 3D Stochastic Road Surface Modeling Based on the Sine Wave Superposition Method
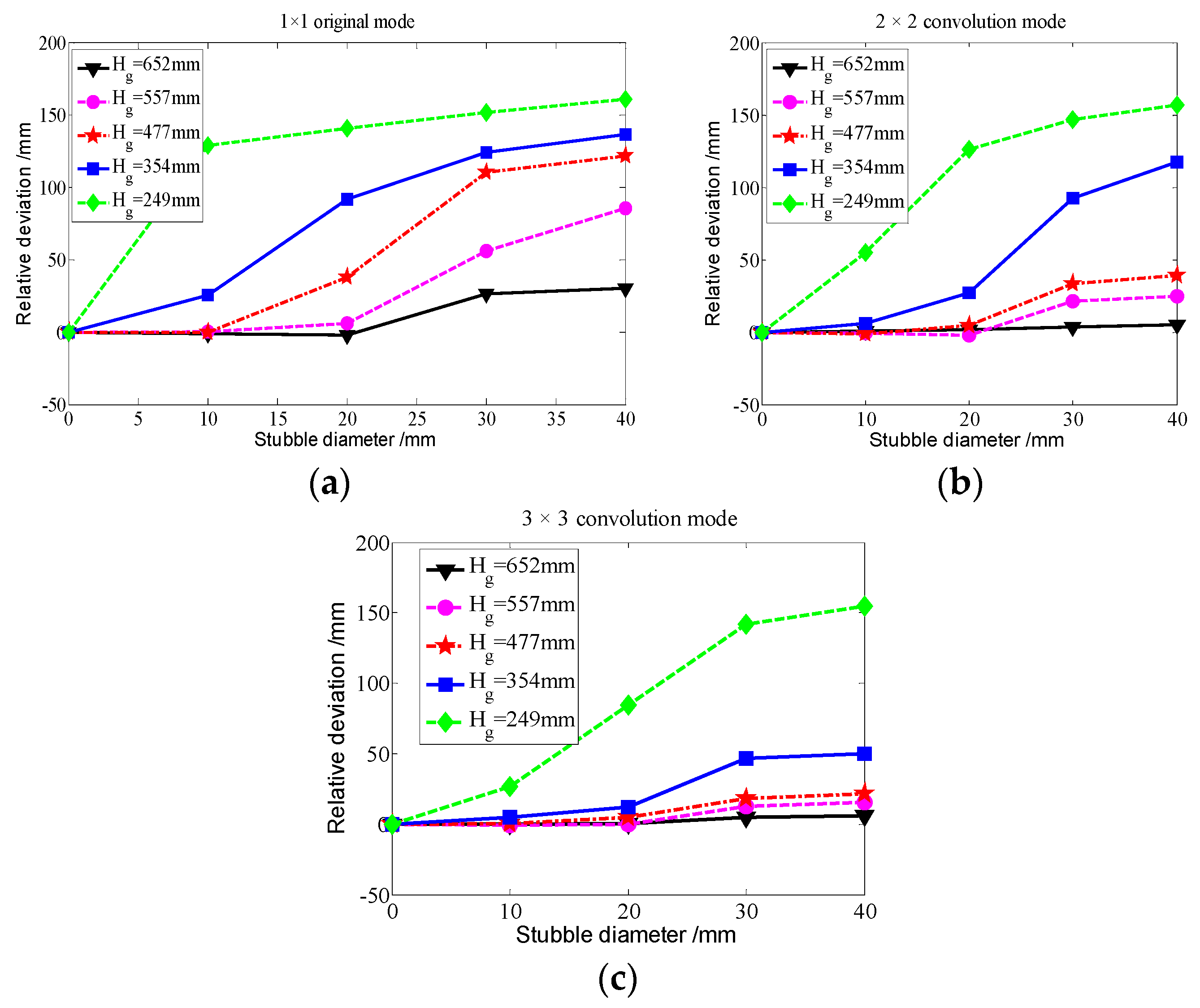
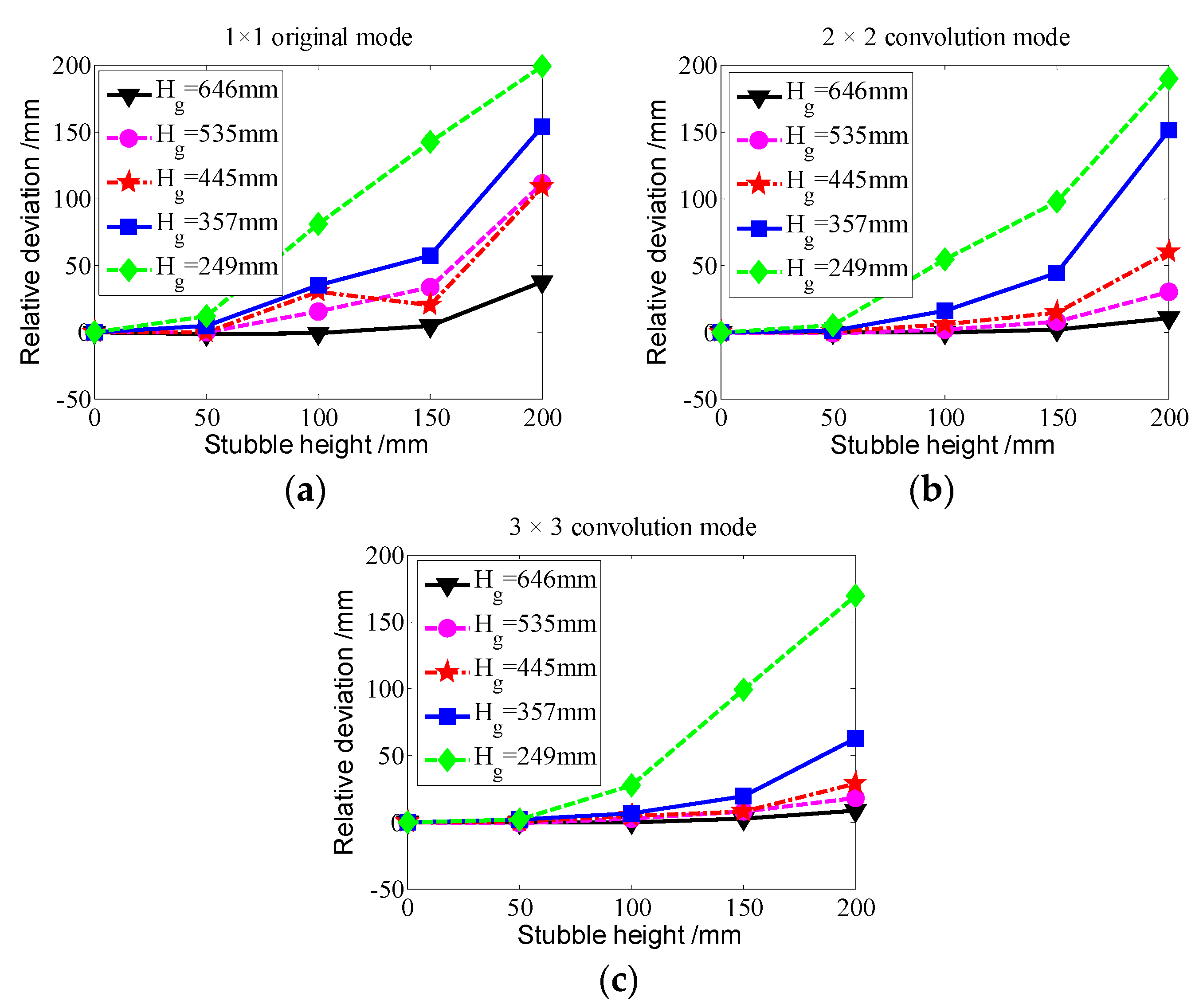
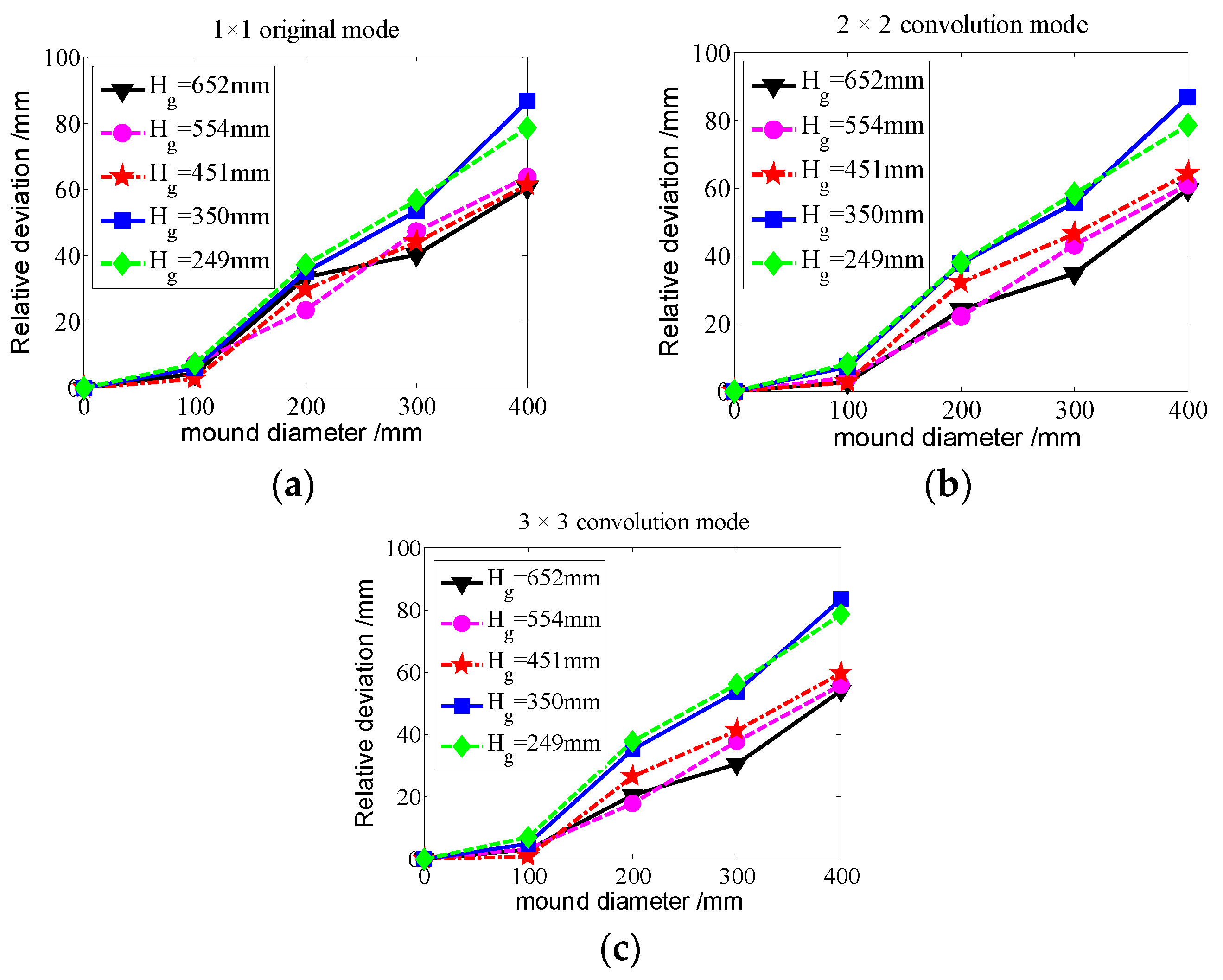
2.2. Data Acquisition and Analysis of the Area Array LiDAR
2.3. Mathematical Model of Electromagnetic Directional Valve
2.3.1. Circuit Equation
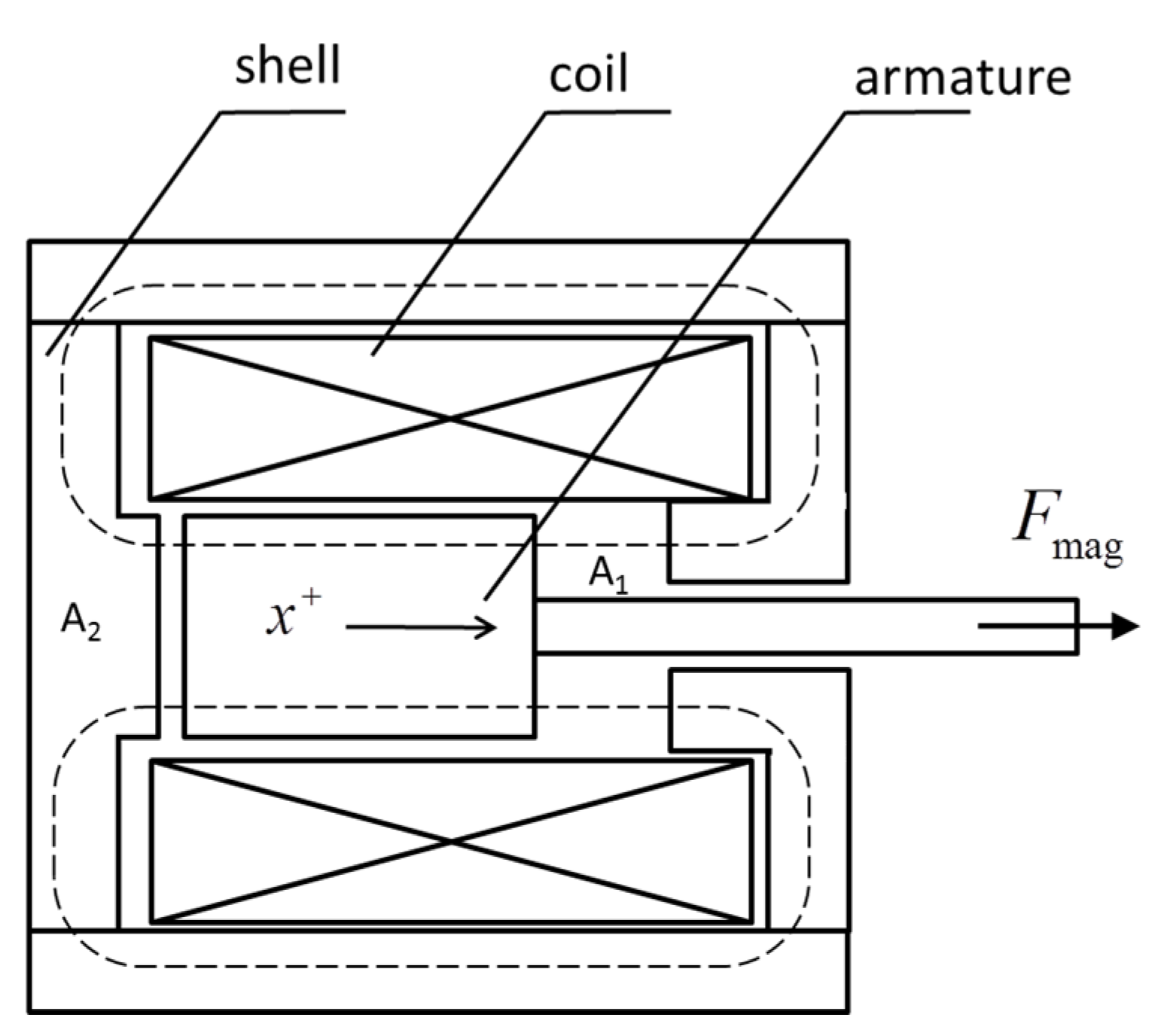
2.3.2. Magnetic Circuit Equation
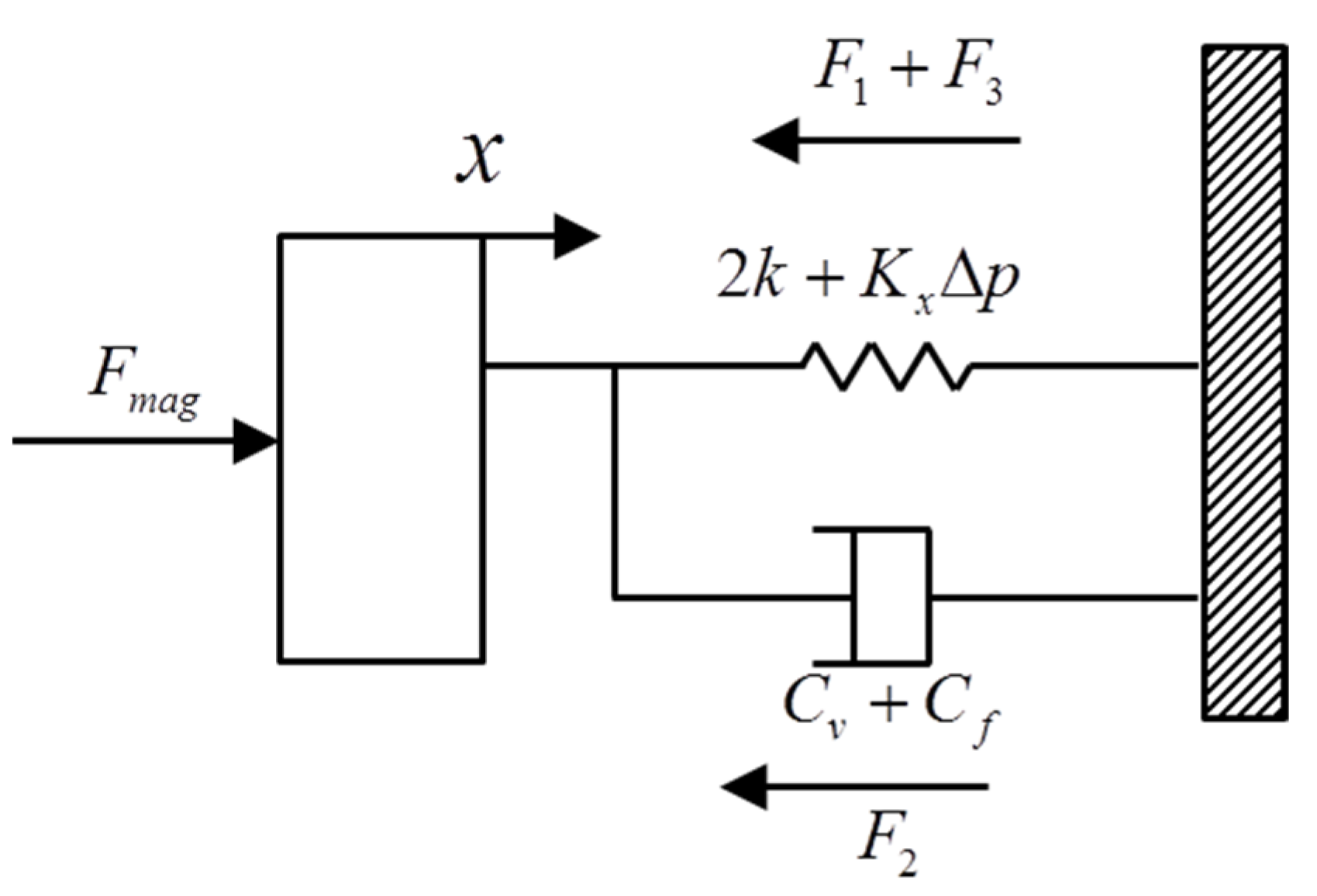
2.3.3. Mechanical Motion Equation
2.3.4. Analysis of Hydraulic System Control Strategy
3. Results and Discussion
3.1. Control System Design
3.2. Laboratory Performance Test Results and Analysis
3.3. Discussion
4. Conclusions
- (1)
- In response to the problem of automatic control of header height, this study simulated three-dimensional ground elevation fluctuations based on a sine wave superposition model, which can generate the spatial distribution of road roughness of different levels as needed.
- (2)
- Using an area array LiDAR to collect data on a cutting height of 8 × 8, the influence of soil mounds and stubble on the measurement results was analyzed. The results showed that the neighborhood averaging method effectively weakened the interference of stubble while detecting soil mounds to the maximum extent possible.
- (3)
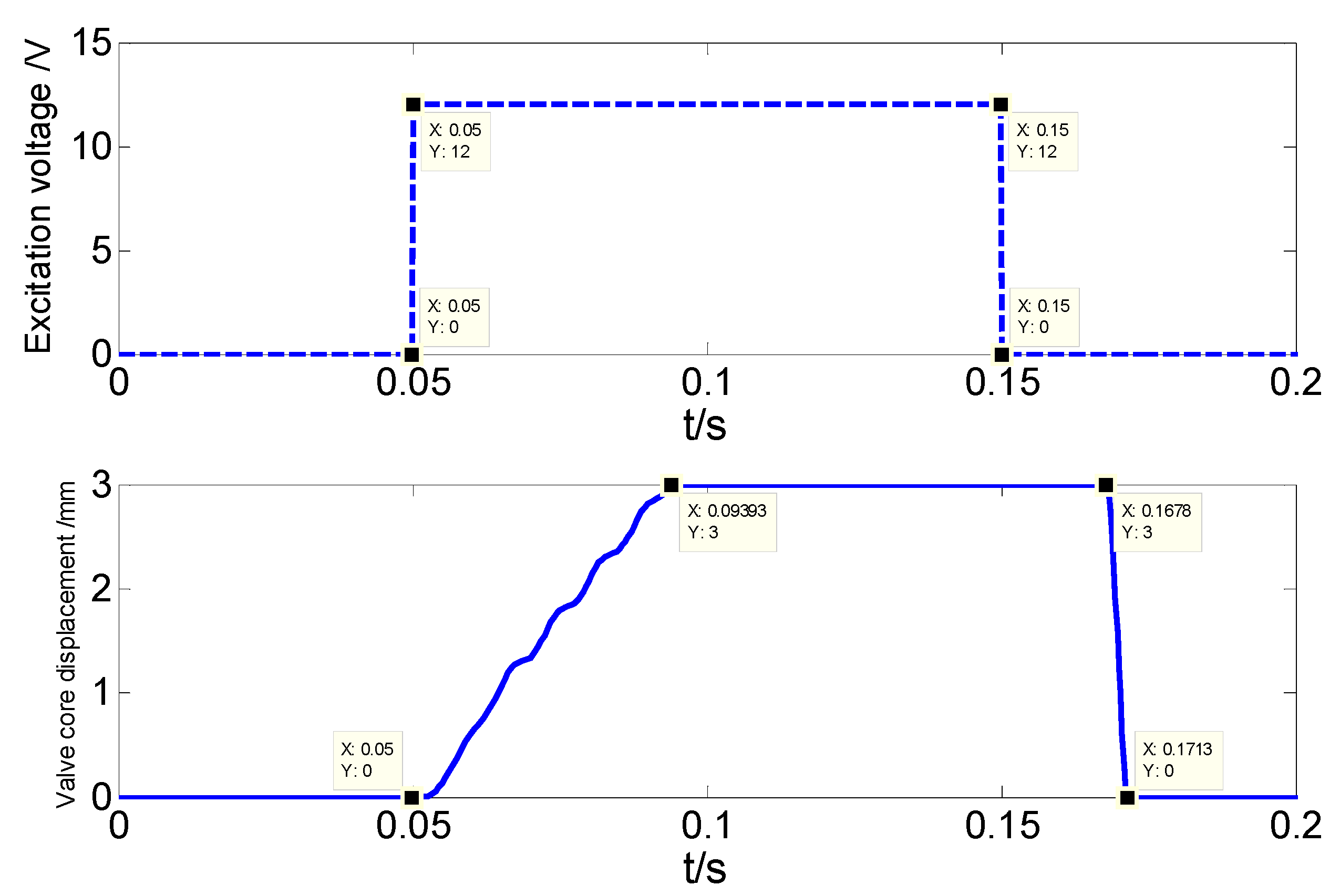
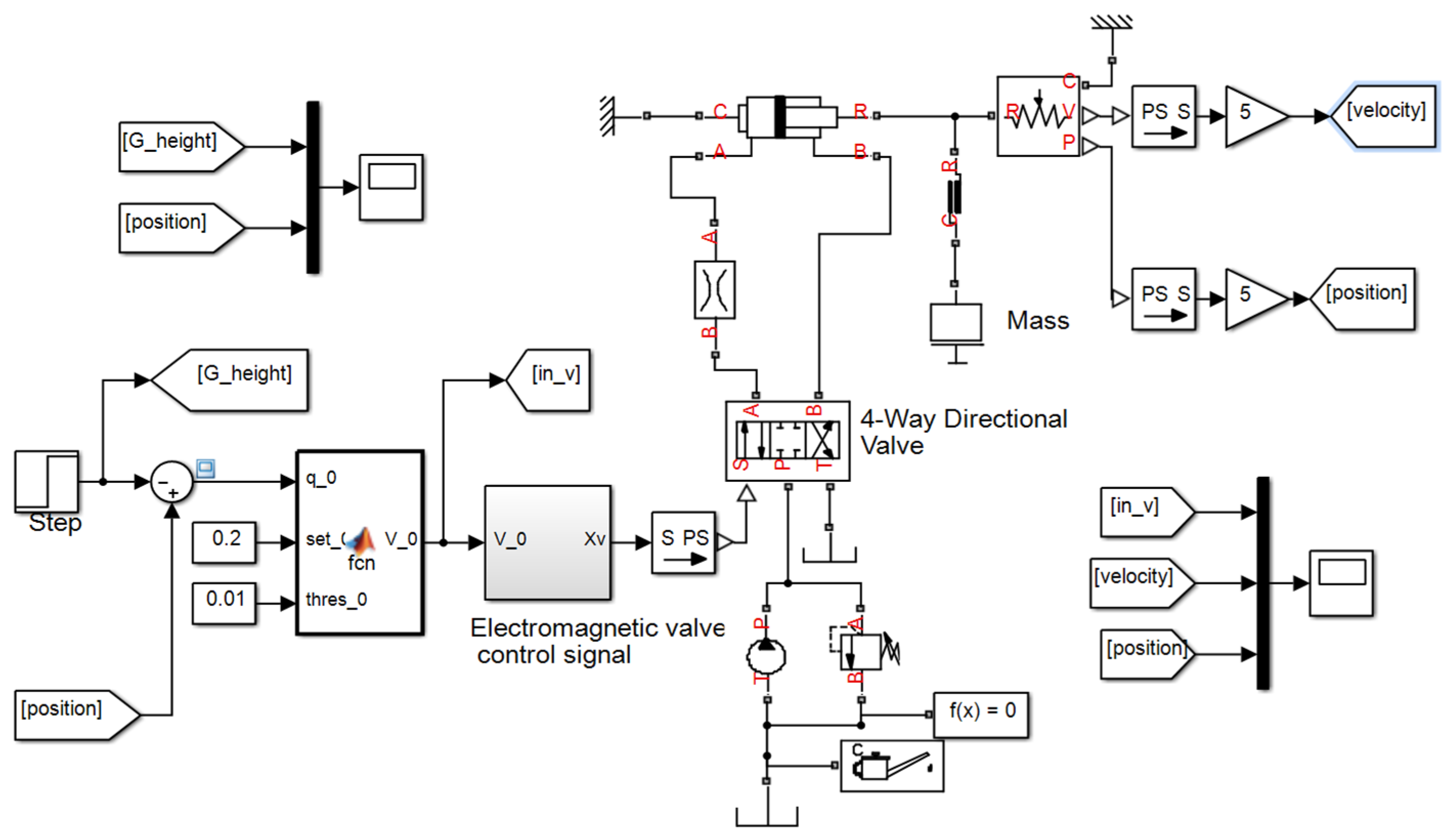
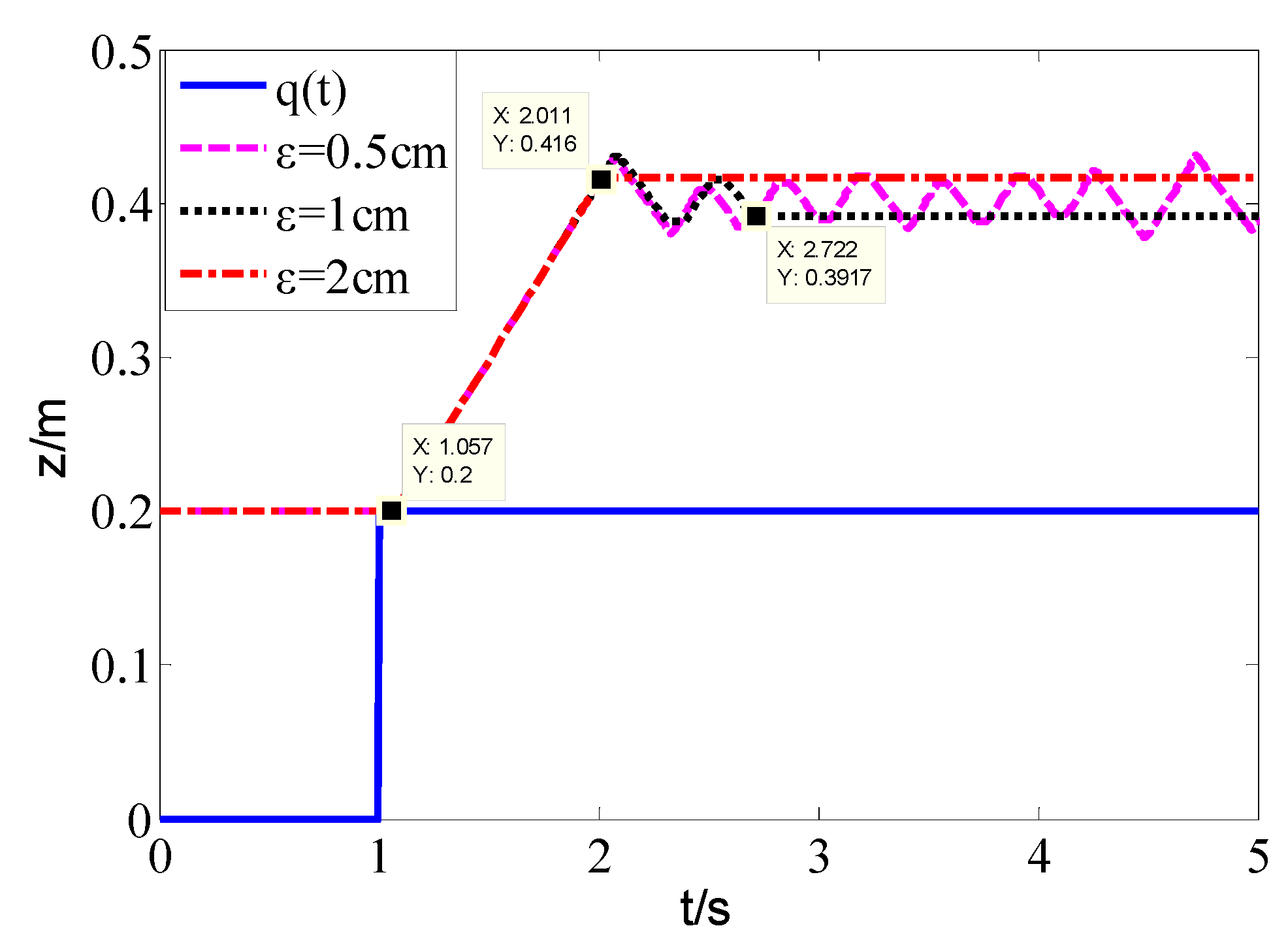
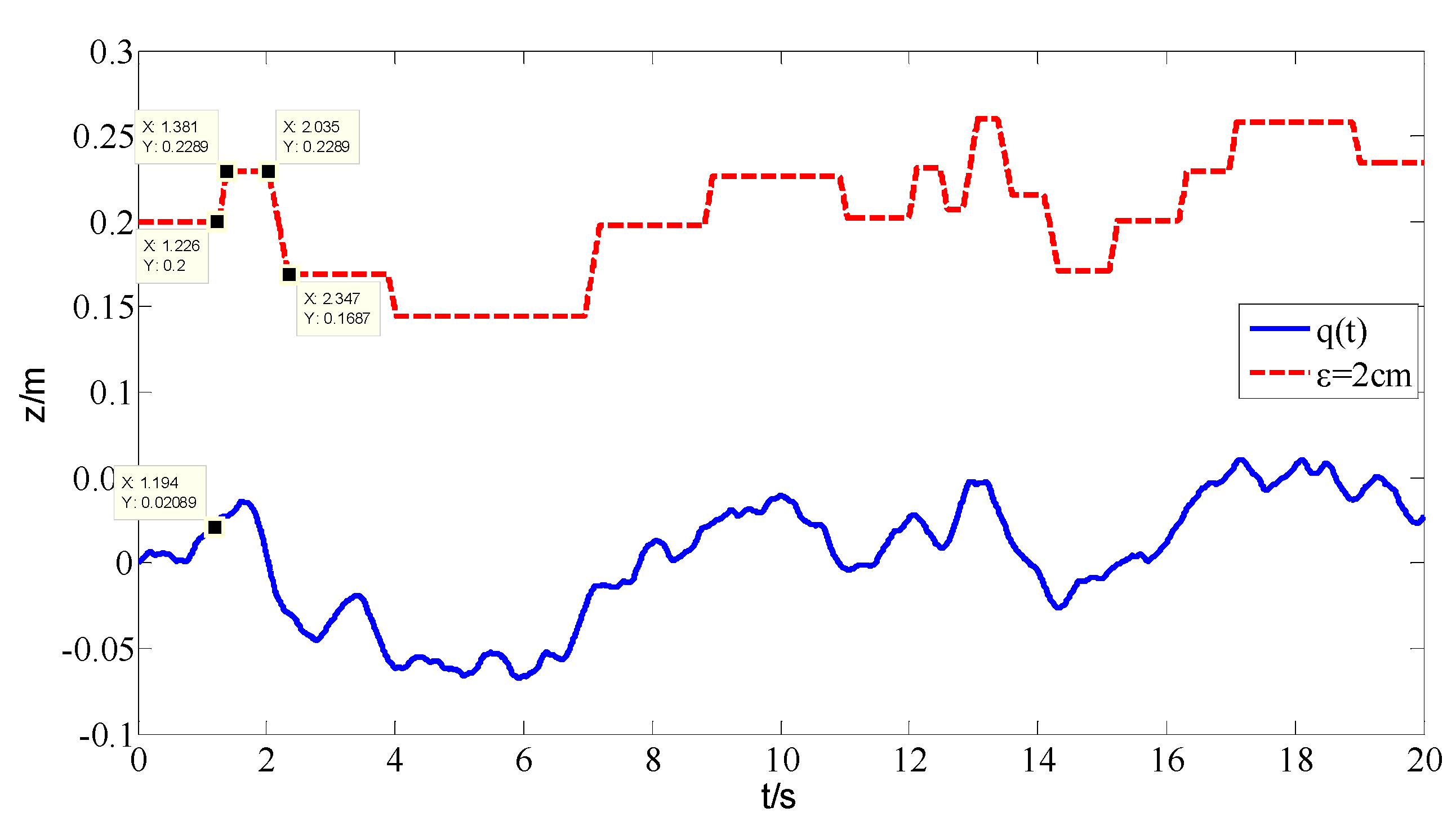
- A dynamic process simulation model of the electromagnetic directional valve core was constructed, and the on/off delay characteristics of the electromagnetic directional valve were analyzed. Using the Simscape module in Simulink, a physical model of the hydraulic system was constructed, and the Bang Bang switch predictive control system with a position threshold was introduced to achieve early switching of the electromagnetic directional valve circuit. Then, the variation in the header height under different position thresholds was analyzed.
- (4)
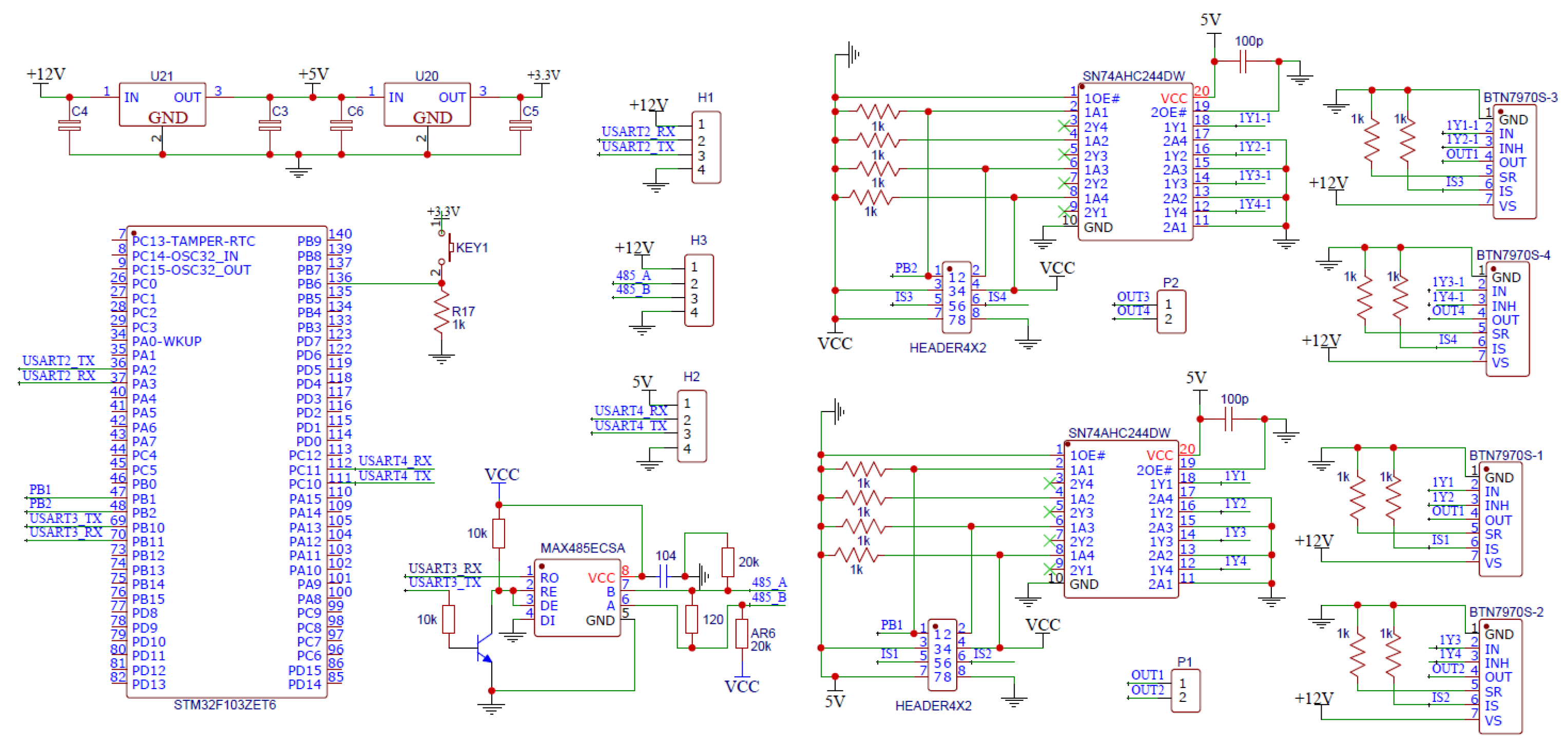
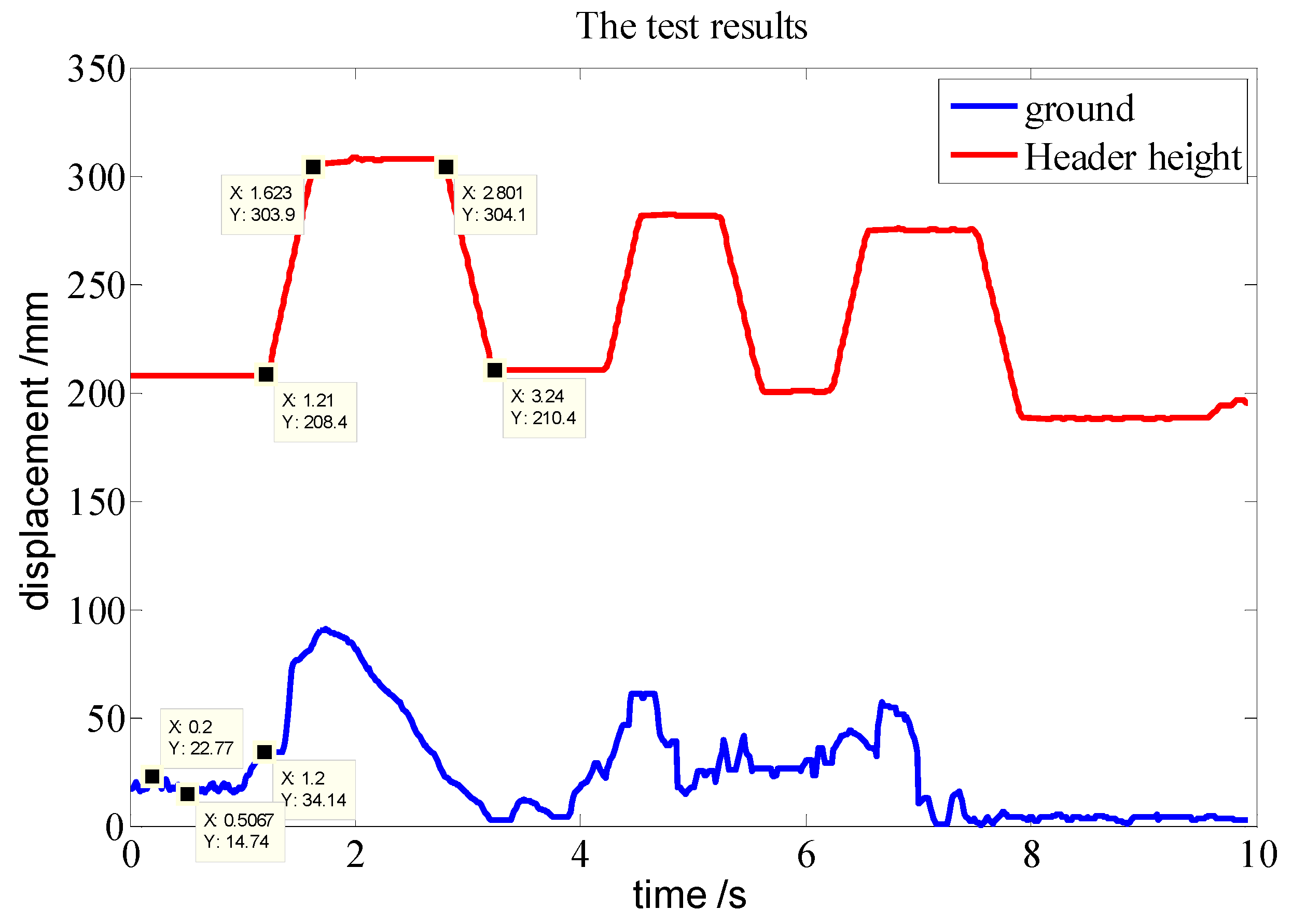
- An automatic control system for the height of the cutting table was developed based on the STM32 microcontroller. Experimental tests were conducted using the agricultural machinery hydraulic automatic control test bench independently developed by Shanxi Agricultural University. Overall, the control effect showed that the hydraulic cylinder did not adjust in response to a small undulating road surface; the hydraulic cylinder only adjusted in response to a large undulating road surface. At the same time, there was no overshoot during the lifting process of the cutting table, with a rising speed of 0.23 m/s and a falling speed of 0.21 m/s. The system response speed was higher than the national standard; therefore, the proposed automatic control system meets practical usage requirements.
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Conflicts of Interest
References
- Pask, G.S.; Wilson, J.N.; Zoerb, G.C. Automatic Header-Height Control System for Windrowers. Trans. Asae 1974, 17, 597–602. [Google Scholar] [CrossRef]
- Clayton, J.E.; Eiland, B.R. LaboratoryAnnual Report of the USDA Sugarcane Research; USDA Sugarcane Research Laboratory: Belle Glade, FL, USA, 1977; pp. 30–70. [Google Scholar]
- Wright, M.E.; Simoneaux, J.J.; Drouin, B. Automatic height control of a sugarcane harvester basecutter. SAE Trans. 1998, 107, 239–246. [Google Scholar]
- Neves, J.L.M.; Marchi, A.S.; Pizzinato, A.A.S.; Menegasso, L.R. Comparative testing of a floating and aconventional fixed base cutter. In Proceedings of the International Society of Sugar Cane Technologists, Brisbane, Australia, 17–21 September 2001; pp. 257–262. [Google Scholar]
- Tulpule, P.; Kelkar, A. Integrated robust optimal design (IROD) of header height controlsystem for combine harvester. In Proceedings of the American Control Conference, Portland, OR, USA, 4–6 June 2014; pp. 2699–2704. [Google Scholar]
- Geng, A.; Zhang, M.; Zhang, L.; Zhang, Z.; Gao, A.; Zheng, J. Design and Experiment of Automatic Control System for Corn Header Height. Trans. Chin. Soc. Agric. Mach. 2020, 51, 118–125. [Google Scholar]
- Liu, Q.; Li, C.; Wei, X.; Lu, Z.; Wang, A. Research on the header height control strategy of combine harvester based on LQR. J. Electron. Meas. Instrum. 2022, 36, 65–72. [Google Scholar]
- Guan, Y.; Jin, Z.; Bai, X.; Wang, S.; Wu, L.; Huang, W. Design and Experiment of Servo Control System for Sugarcane Header. Trans. Chin. Soc. Agric. Mach. 2023, 54, 119–128. [Google Scholar]
- Liang, Z. Study on the Adaptive Control System of Sugarcane Harvester Based on Cutting Height Detection. Ph.D. Thesis, Chang’an University, Xi’an, China, 2022. [Google Scholar]
- Suomi, P.; Oksanen, T. Automatic working depth control for seed drill using ISO 11783 remote control messages. Comput. Electron. Agric. 2015, 116, 30–35. [Google Scholar] [CrossRef]
- Chang, K.Y.; Zaman, Q.; Farooque, A.; Rehman, T.; Esau, T. An on-the-go ultrasonic plant height measurement system (UPHMS II) in the wild blueberry cropping system. In Proceedings of the 2016 ASABE Annual International Meeting, Orlando, FL, USA, 17–20 July 2016. [Google Scholar]
- Cleodolphi, D.; Verstraete, J.; Fagundes, A.; Sarchi, R.; Tanaka, F. Control of Base Cutter Height for Multiple Row Sugarcane Harvesters. America US09781880, 10 October 2017. [Google Scholar]
- Chong, Z. Research on header profiling and crop height measurement method. Master’s Thesis, Southeast University, Dhaka, Bangladesh, 2020. [Google Scholar]
- Huang, M. Research on Techniques of Wide and Multilayer Cutting and Its Adaptive Control for Ratoon Rice Harvesting. Ph.D. Thesis, Jiangsu University, Zhenjiang, China, 2021. [Google Scholar]
- Liu, G.; Xia, J.; Zheng, K.; Cheng, J.; Wang, K.; Liu, Z.; Wei, Y.; Xie, D. Measurement and evaluation method of farmland microtopography feature information based on 3D LiDAR and inertial measurement unit. Soil Tillage Res. 2024, 236, 105921. [Google Scholar] [CrossRef]
- Christlieb, A.; Lawlor, D.; Wang, Y. A multiscale sub-linear time Fourier algorithm for noisy data. Appl. Comput. Harmon. Anal. 2016, 40, 553–574. [Google Scholar] [CrossRef]
- Li, J.; Zhang, Z.; Gao, X.; Wang, P.; Li, J. Relation between Power Spectral Density of Road Roughness and International Roughness Index and Its Application. Int. J. Veh. Des. 2019, 77, 247–271. [Google Scholar] [CrossRef]
- Gardulski, J.; Adamczyk, J.; Targosz, J. Determination of the Stochastic Kinematic Excitation of the Car by the Real Profile of the Road Surface. Arch. Transp. 2011, 23, 447–454. [Google Scholar] [CrossRef]
- Hou, T.; Kou, Z.; Wu, J.; Jin, T.; Su, K.; Du, B. Research on Positioning Control Strategy for a Hydraulic Support Pushing System Based on Iterative Learning. Actuators 2023, 12, 306. [Google Scholar] [CrossRef]
- Jin, L. Study on the Precise Positioning Control of Hydraulic Cylinder Using Solenoid Operated Directional Control Valve. Ph.D. Thesis, Zhejiang University, Hangzhou, China, 2019. [Google Scholar]
- Xu, J.; Wu, J.; Feng, S.; Zhou, Y. Reluctance analysis of rotary valve structure variable inductor. J. Magn. Mater. Devices 2018, 49, 39–43+68. [Google Scholar]
- Rostami, M.; Naderi, P.; Shiri, A. Modeling and analysis of variable reluctance resolver using magnetic equivalent circuit. COMPEL Int. J. Comput. Math. Electr. Electron. Eng. 2021, 40, 921–939. [Google Scholar] [CrossRef]
- Wei, L.; Dai, F.; Han, Z.; Li, X.; Gao, A. Experiment on plot wheat breeding combine harvester. Acta Agric. Zhejiangensis 2016, 28, 1082–1088. [Google Scholar]
- Wang, Q.; Meng, Z.J.; Wen, C.K.; Qin, W.C.; Wang, F.; Zhang, A.Q.; Zhao, C.J.; Yin, Y.X. Grain combine harvester header profiling control system development and testing. Comput. Electron. Agric. 2024, 223, 109082. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Symbol | Value | Parameter | Symbol | Value |
|---|---|---|---|---|---|
| Armature with rod end area | A1 | 56.67 mm2 | Spring stiffness | k | 4.6 N/mm |
| Armature without rod end area | A2 | 84.95 mm2 | Cover length | d0 | 1 mm |
| Electromagnetic stroke | S | 3 mm | Hydrodynamic coefficient | Kx | 6.88 × 10−4 |
| Permeability of vacuum | 4π × 10−7 | Speed damping coefficient | Cv | 0.005 Pa·s | |
| Turns | N | 3000 | Oil viscosity damping coefficient | Cf | 0.005 Pa·s |
| Coil resistance | R | 6 Ω | Valve core quality | m | 50 g |
| Excitation voltage | U | 12 V/0 V | Pressure drop | ∆p | 6.85 Mpa |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, C.; Li, Q.; Ye, S.; Zhang, J.; Zheng, D. Header Height Detection and Terrain-Adaptive Control Strategy Using Area Array LiDAR. Agriculture 2024, 14, 1293. https://doi.org/10.3390/agriculture14081293
Zhang C, Li Q, Ye S, Zhang J, Zheng D. Header Height Detection and Terrain-Adaptive Control Strategy Using Area Array LiDAR. Agriculture. 2024; 14(8):1293. https://doi.org/10.3390/agriculture14081293
Chicago/Turabian StyleZhang, Chao, Qingling Li, Shaobo Ye, Jianlong Zhang, and Decong Zheng. 2024. "Header Height Detection and Terrain-Adaptive Control Strategy Using Area Array LiDAR" Agriculture 14, no. 8: 1293. https://doi.org/10.3390/agriculture14081293