Design of a 2R Open-Chain Plug Seedling-Picking Mechanism and Control System Constrained by a Differential Non-Circular Planetary Gear Train

Abstract
:1. Introduction
2. Materials and Methods
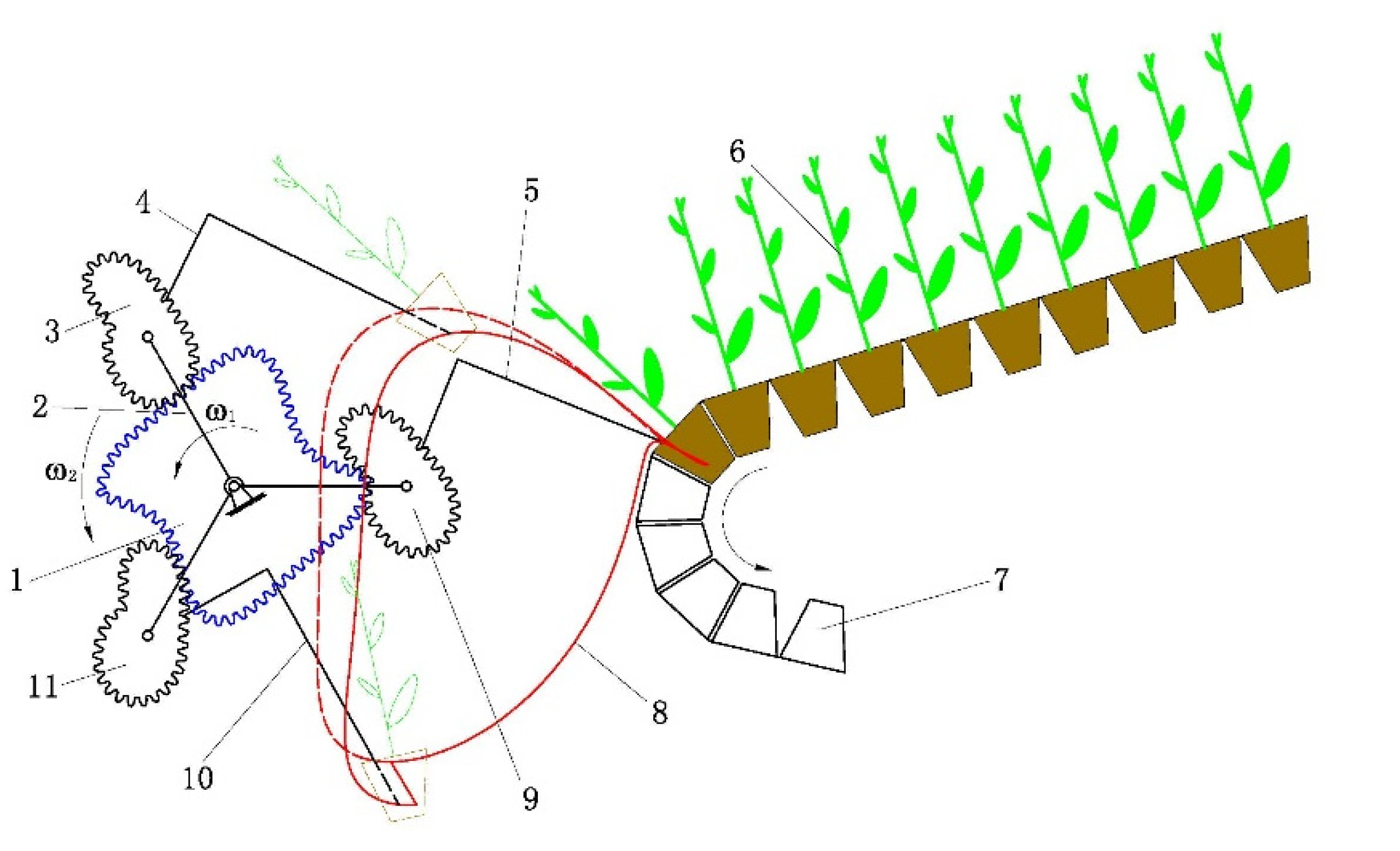
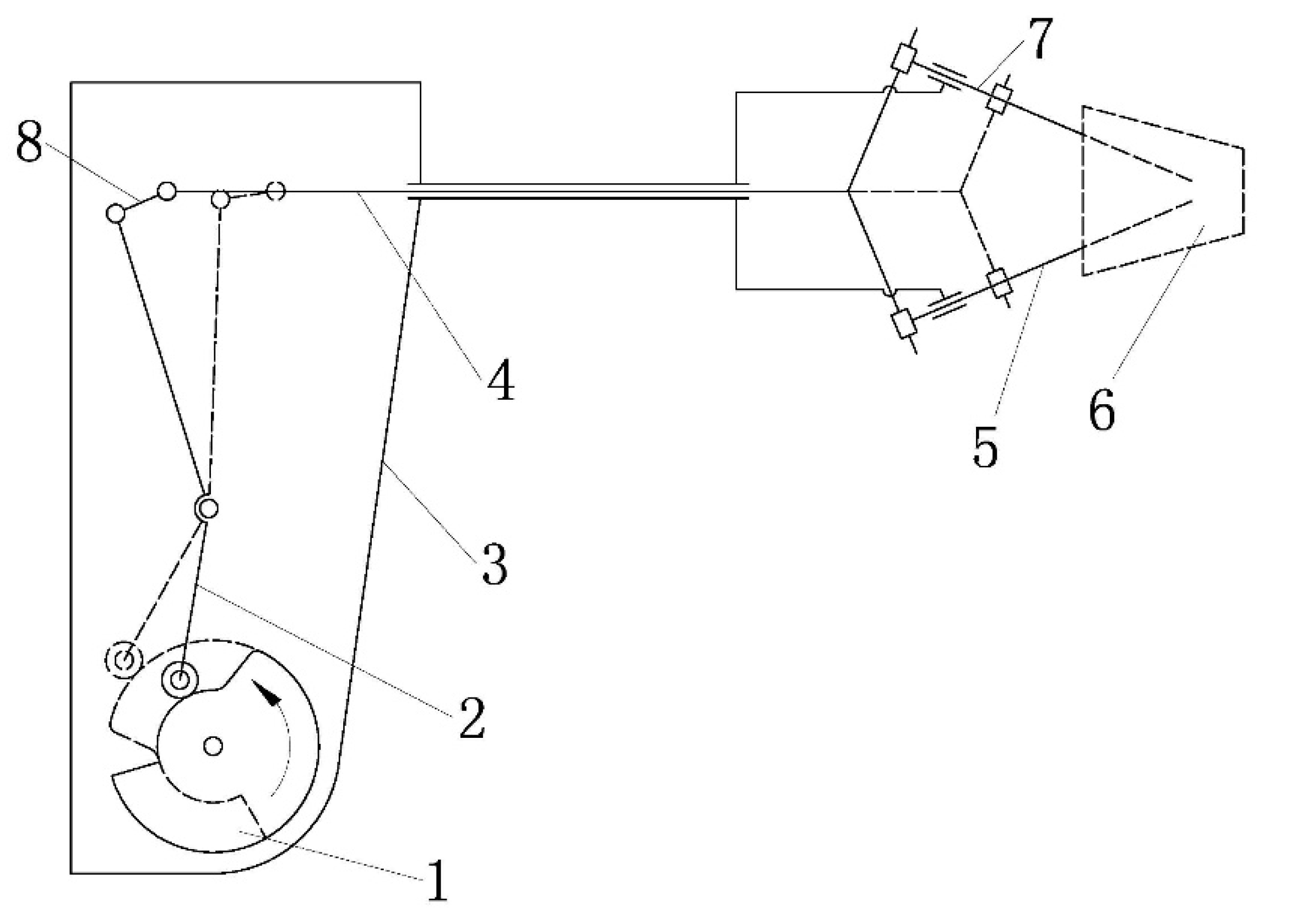
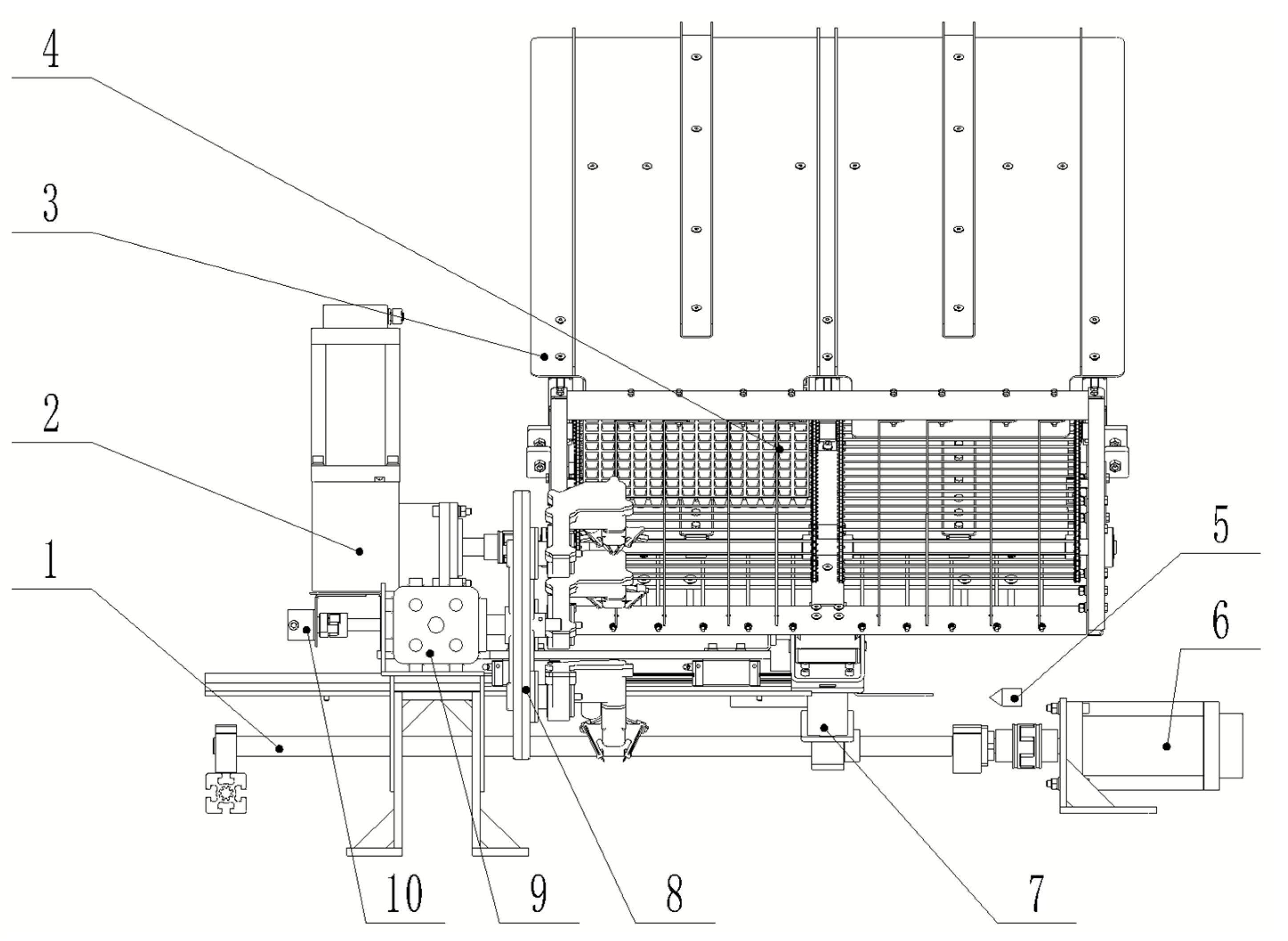
2.1. Composition and Working Principle of the SPM
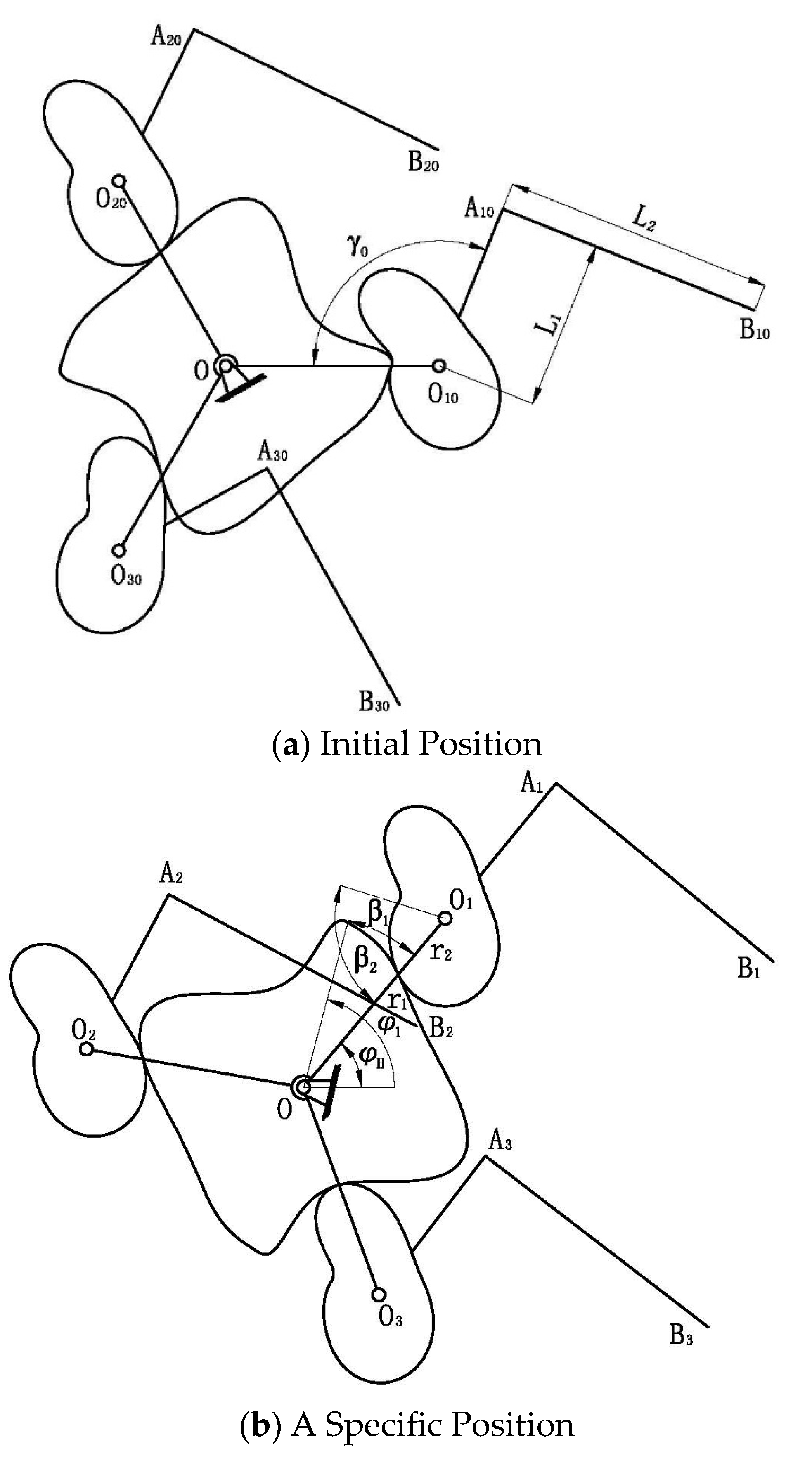
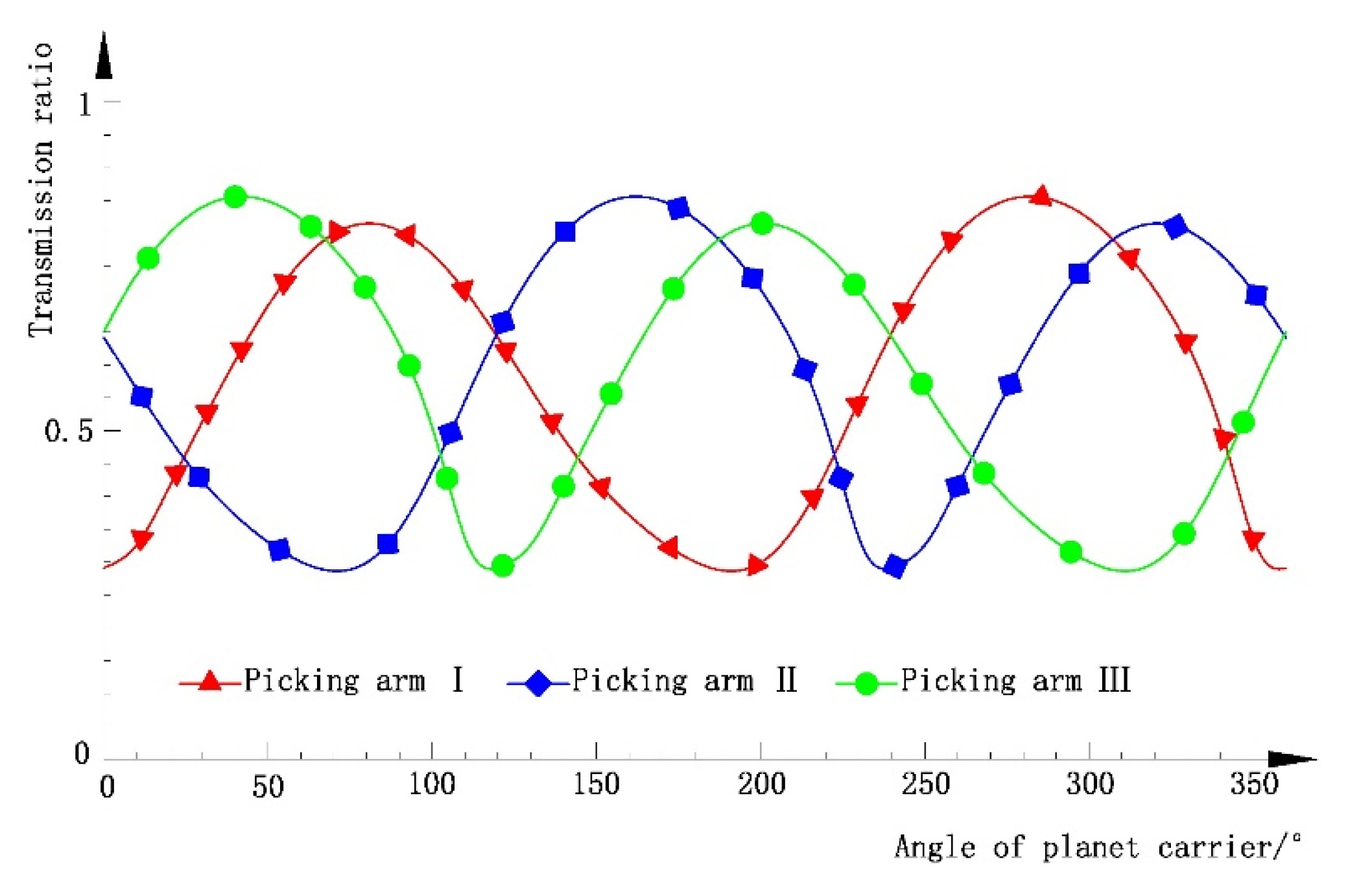
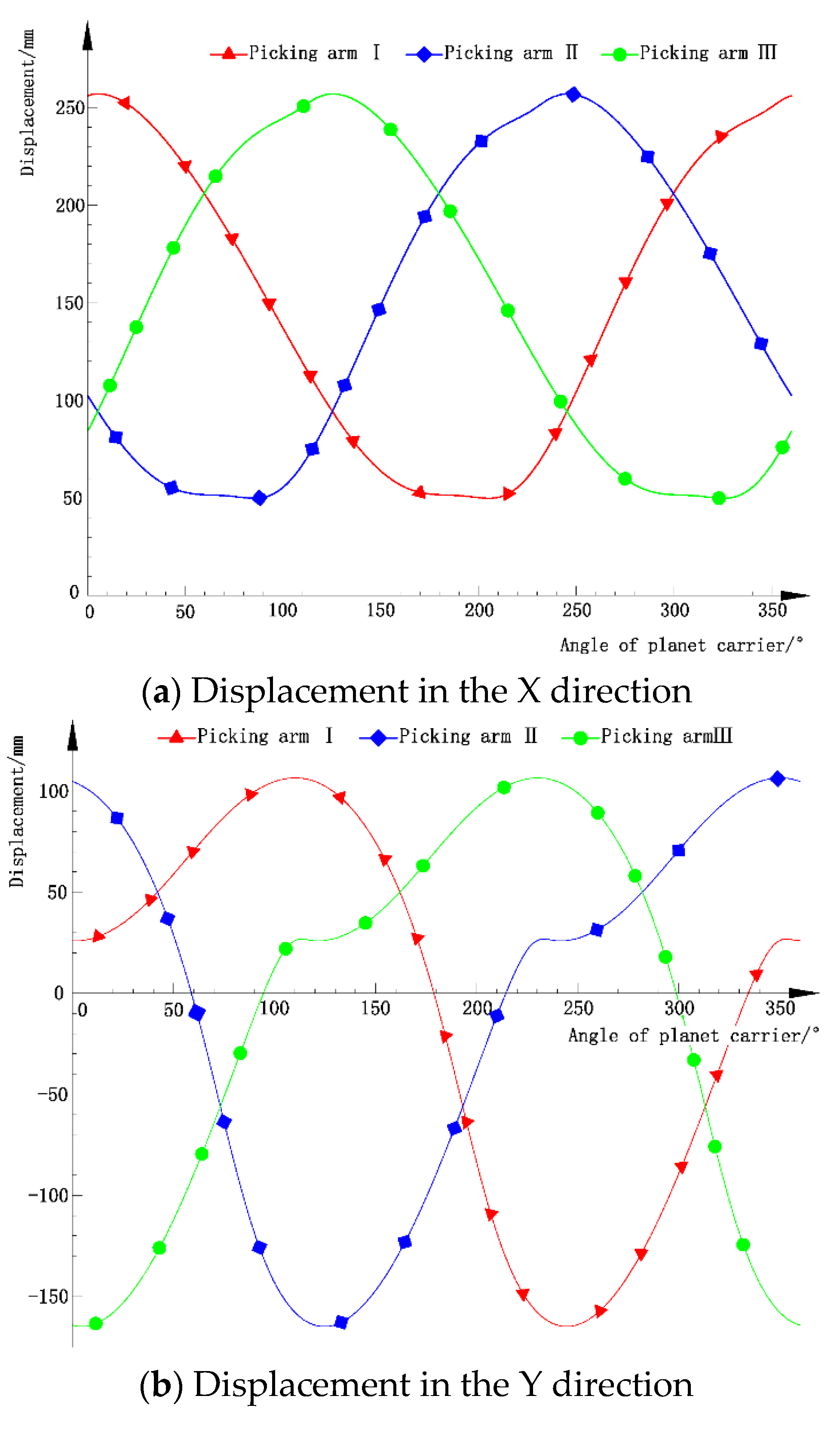
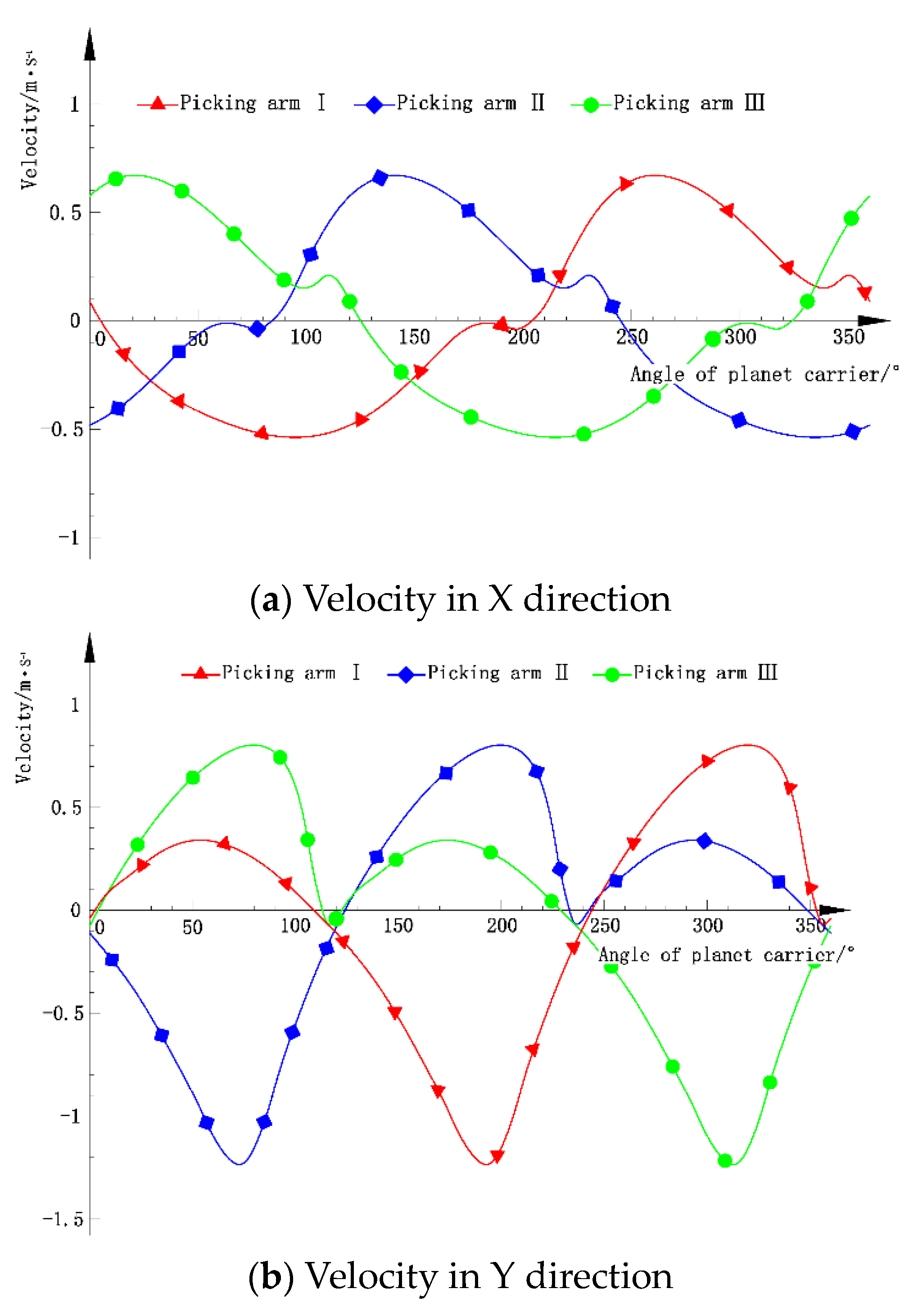
2.2. Kinematic Model of a 2R Open-Chain Mechanism Constrained by a Differential Non-Circular Gear Train
2.3. Optimization of SPM Parameters
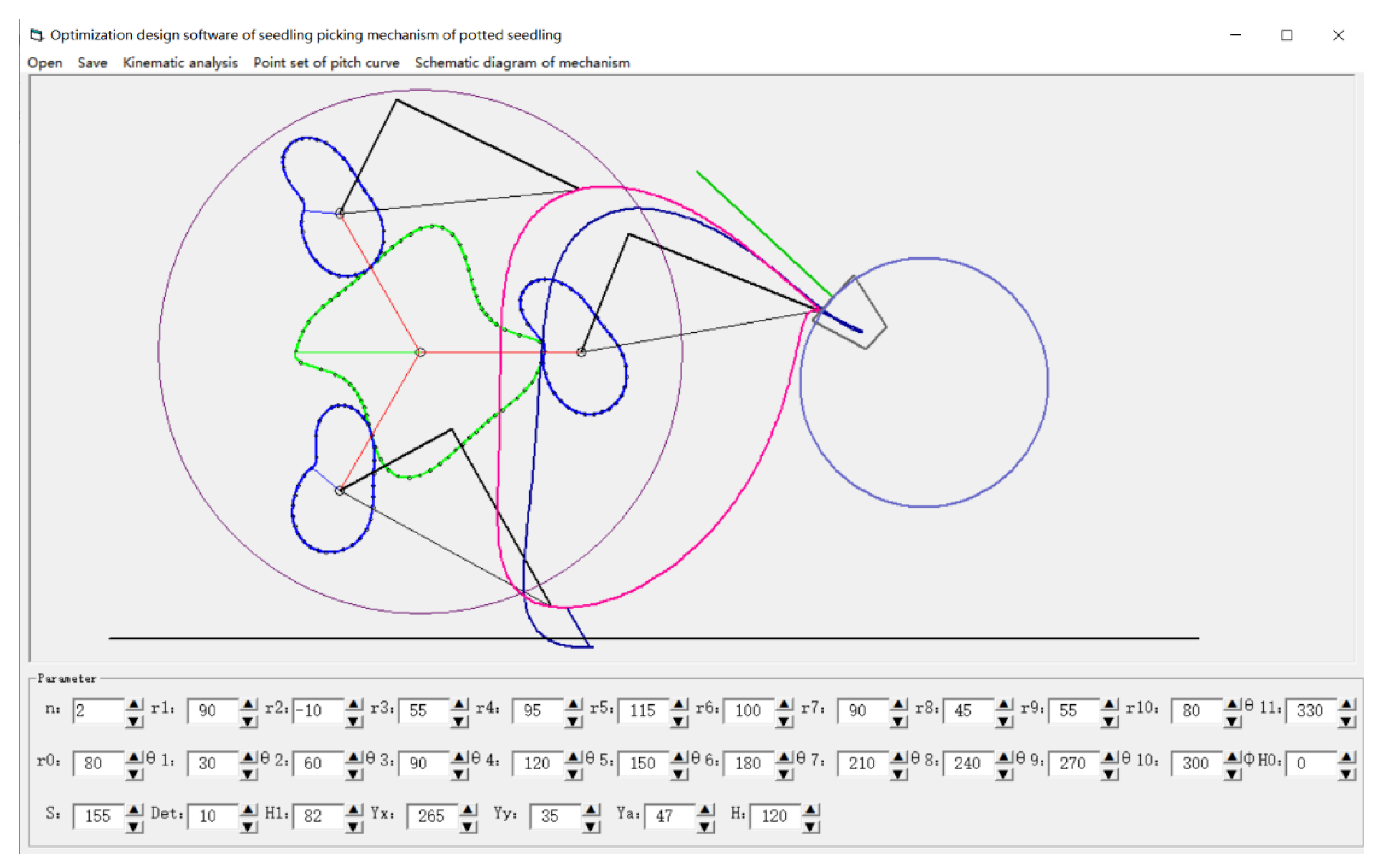
2.3.1. Development of Optimization Design Software and Parameter Optimization
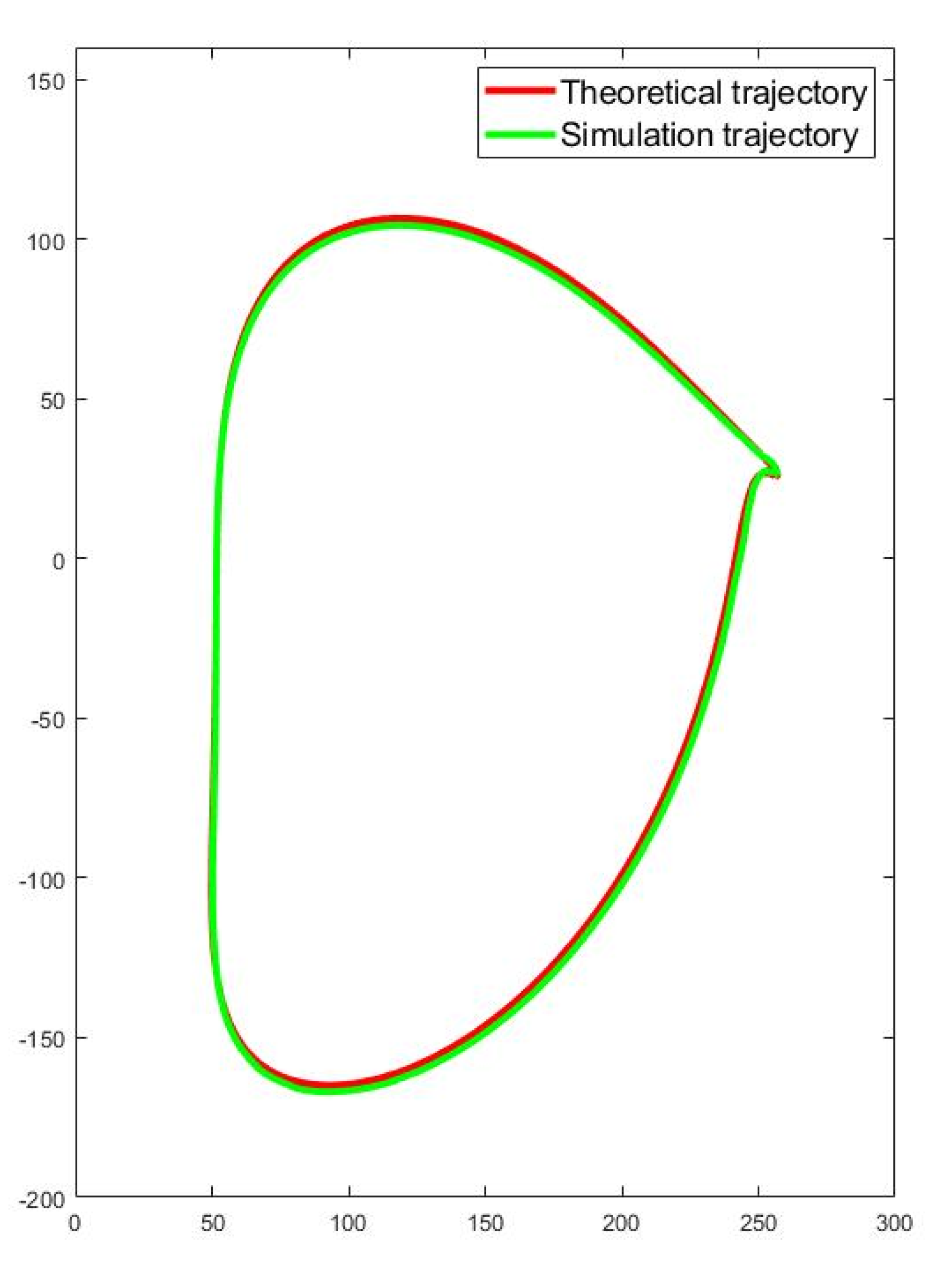
2.3.2. Seedling-Picking Trajectory Analysis
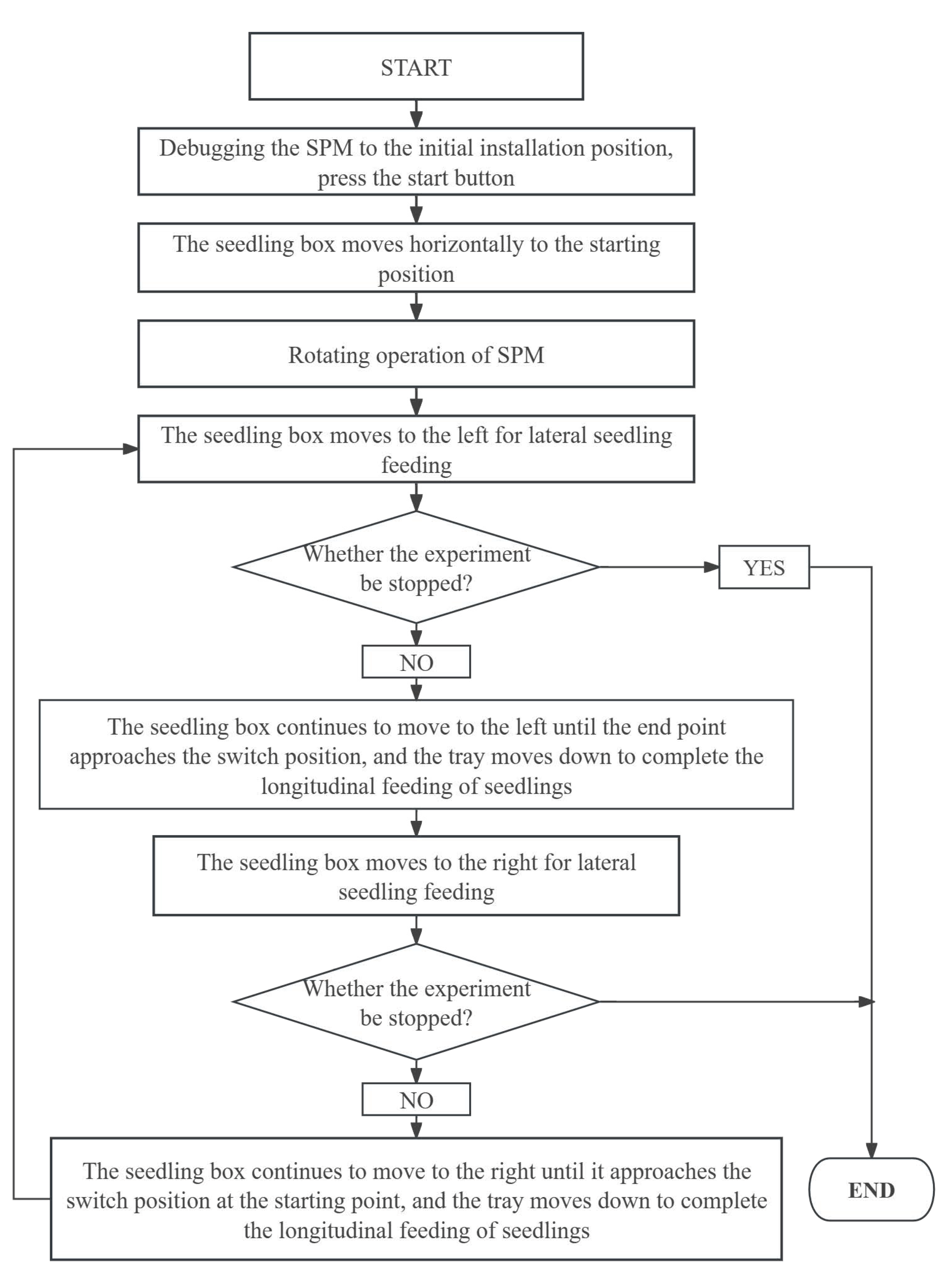
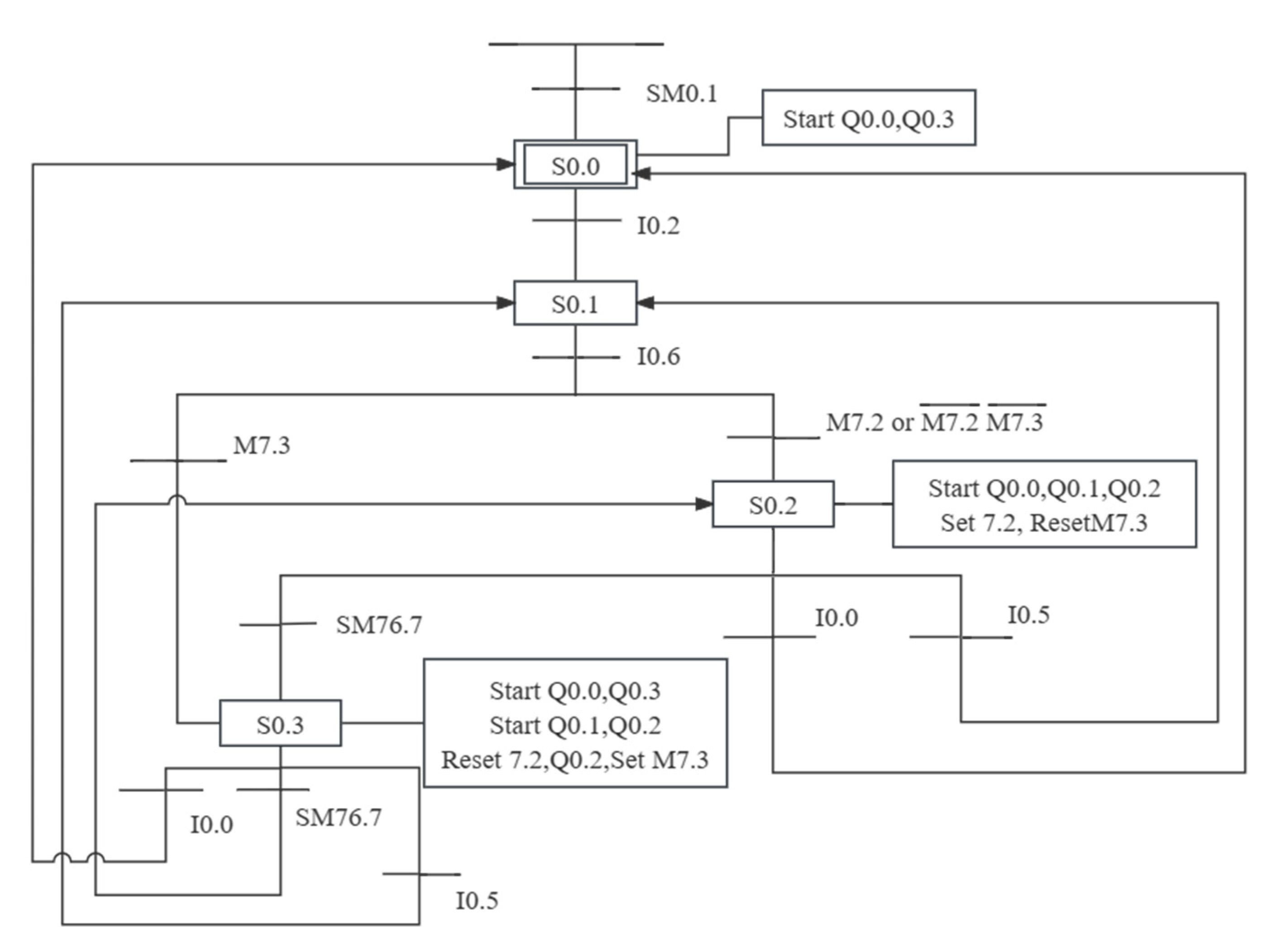
2.4. Design of the SPM Control System
3. Results and Discussion
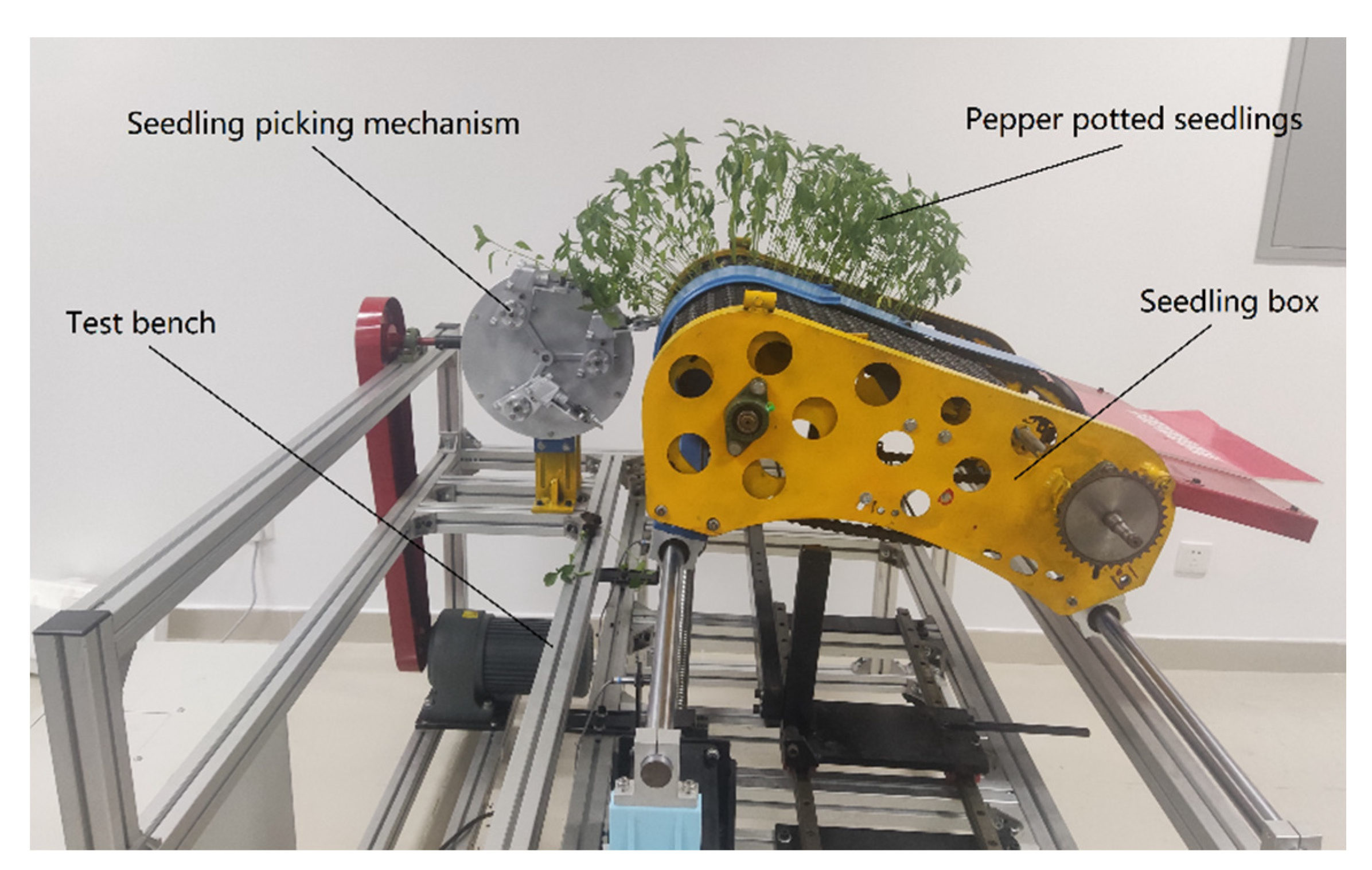
3.1. Attitude Verification Experiment
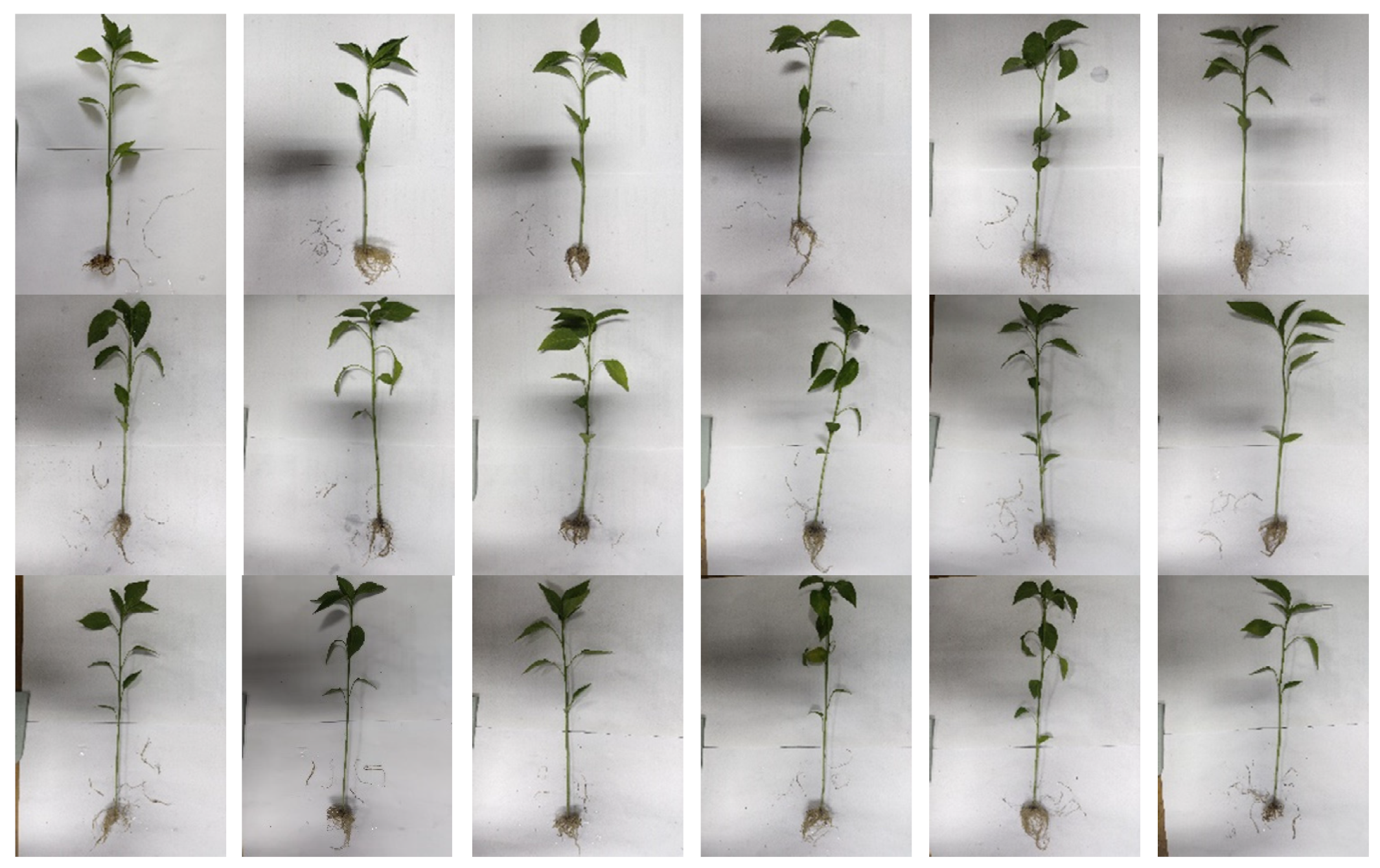
3.2. Seedling Picking Performance Test
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Zhao, X.; Guo, J.; Li, K.; Dai, L.; Chen, J. Optimal design and experiment of 2-DoF five-bar mechanism for flower seedling transplanting. Comput. Electron. Agric. 2020, 178, 105746. [Google Scholar] [CrossRef]
- Jin, X.; Li, S.; Yang, X.; Sun, X.; Yan, H.; Wu, J. Analysis and Parameter Optimization for Vegetable Plug Seedling Pick-up Mechanism. Trans. Chin. Soc. Agric. Mach. 2013, 44, 1–6, (In Chinese with English Abstract). [Google Scholar]
- Cui, W.; Fang, X.; Zhao, L.; Song, J.; Lin, J.; Dong, X. Structural Optimization and Experimental Verification of Geared Five-bar Linkage Seedling Pick-up Device. Trans. Chin. Soc. Agric. Mach. 2013, 44, 74–77, (In Chinese with English Abstract). [Google Scholar]
- Xu, L.; Zhang, T.; Shi, Z. Design on the Picking Seedling Machinery in the Maize Auto-transplanter. J. China Agric. Univ. 2000, 5, 58–60, (In Chinese with English Abstract). [Google Scholar]
- Yue, R.; Hu, J.; Liu, Y.; Yao, M.; Zhang, T.; Shi, J. Design and Working Parameter Optimization of Pneumatic Reciprocating Seedling-Picking Device of Automatic Transplanter. Agriculture 2022, 12, 1989. [Google Scholar] [CrossRef]
- Sharma, A.; Khar, S. Design and development of a vegetable plug seedling transplanting mechanism for a semi-automatic transplanter. Sci. Hortic. 2024, 326, 112773. [Google Scholar] [CrossRef]
- Dang, Y.; Jin, X.; Li, H.; Wang, J.; Lu, Y.; Ding, B.; Li, X. Design of single-degree-of-freedom four-bar seedling-taking and throwing manipulator. Trans. Chin. Soc. Agric. Eng. 2019, 35, 39–47, (In Chinese with English Abstract). [Google Scholar]
- Li, H.; Cao, W.; Li, S.; Fu, W.; Liu, K. Kinematic analysis and test on automatic pick-up mechanism for chili plug seedling. Trans. Chin. Soc. Agric. Eng. 2015, 31, 20–27, (In Chinese with English Abstract). [Google Scholar]
- Mao, H.; Ma, G.; Han, L.; Hu, J.; Gao, F.; Liu, Y. A whole row automatic pick-up device using air force to blow out vegetable plug seedlings. Span. J. Agric. Res. 2021, 18, e0211. [Google Scholar] [CrossRef]
- Han, L.; Mao, H.; Hu, J.; Xu, J.; Zhao, Z.; Ma, G. Design and test of combined pick-up device for automatic and precise transplanting of vegetable plug seedlings. Trans. Soc. Agric. Eng. 2015, 31 (Suppl. S2), 17–23. (In English) [Google Scholar]
- Han, L.; Mao, H.; Hu, J.; Kumi, F. Development of a riding-type fully automatic transplanter for vegetable plug seedlings. Span. J. Agric. Res. 2019, 17, e0205. [Google Scholar] [CrossRef]
- Han, L.; Mo, M.; Ma, H.; Kumi, F.; Mao, H. Design and Test of a Lateral-Approaching and Horizontal-Pushing Transplanting Manipulator for Greenhouse Seedlings. Appl. Eng. Agric. 2023, 39, 325–338. [Google Scholar] [CrossRef]
- Gao, X.; Quan, W.; Sun, S.; Xiao, M. Design and test of a cam for the plug seedling pick-up mechanism with sector gear. J. Hunan Agric. Univ. (Nat. Sci.) 2014, 40, 431–434, (In Chinese with English Abstract). [Google Scholar]
- Jia, B.; Ye, M.; Zhai, X.; Han, L.; Lu, J. Design and Tests of Cam—Link Combination Pick—Up Device for Vegetable Transplanters. J. Agric. Mech. Res. 2019, 41, 78–82, (In Chinese with English Abstract). [Google Scholar]
- Bae, K.-Y.; Yang, Y.-S. Design of a non-circular planetary-gear-train system to generate an optimal trajectory in a rice transplanter. J. Eng. Des. 2007, 18, 361–372. [Google Scholar] [CrossRef]
- Tong, Z.; Yu, G.; Zhao, X.; Liu, P.; Ye, B. Design of Vegetable Pot Seedling Pick-up Mechanism with Planetary Gear Train. Chin. J. Mech. Eng. 2020, 33, 63. [Google Scholar] [CrossRef]
- Xue, X.; Li, L.; Xu, C.; Li, E.; Wang, Y. Optimized design and experiment of a fully automated potted cotton seedling transplanting mechanism. Int. J. Agric. Biol. Eng. 2020, 13, 111–117. [Google Scholar] [CrossRef]
- Iqbal, M.Z.; Islam, M.N.; Chowdhury, M.; Islam, S.; Park, T.; Kim, Y.-J.; Chung, S.-O. Working Speed Analysis of the Gear-Driven Dibbling Mechanism of a 2.6 kW Walking-Type Automatic Pepper Transplanter. Machines 2021, 9, 6. [Google Scholar] [CrossRef]
- Iqbal, M.Z.; Islam, M.N.; Ali, M.; Kabir, M.S.N.; Park, T.; Kang, T.G.; Park, K.S.; Chung, S.O. Kinematic analysis of a hopper-type dibbling mechanism for a 2.6 kW two-row pepper transplanter. J. Mech. Sci. Technol. 2021, 35, 2605–2614. [Google Scholar] [CrossRef]
- Sun, L.; Shen, J.; Zhou, Y.; Ye, Z.; Yu, G.; Wu, C. Design of non-circular gear linkage combination driving type vegetable pot seedling transplanting mechanism. Trans. Chin. Soc. Agric. Eng. 2019, 35, 26–33, (In Chinese with English Abstract). [Google Scholar]
- Sun, L.; Hu, Y.; Xing, Z.; Yu, G.; Yu, Y. Motion Synthesis of Rotary Pot Seedling Transplanting Mechanism Based on Approximate Multi-pose. Trans. Chin. Soc. Agric. Mach. 2020, 51, 103–111, (In Chinese with English Abstract). [Google Scholar]
- Tong, J.; Yu, G.; Zhu, Y.; Ye, B.; Zheng, C.; Huang, J. Design and Experiment of Three-arms Rotary Vegetable Plug Seedling Pick-up Mechanism. Trans. Chin. Soc. Agric. Mach. 2019, 50, 113–121, (In Chinese with English Abstract). [Google Scholar]
- Zhao, X.; Shen, M.; Chen, J.; Dai, L. Kinematic analysis and virtual experiment of rotary pick-up mechanism on cotton transplanter. Trans. Chin. Soc. Agric. Eng. 2014, 30, 13–20, (In Chinese with English Abstract). [Google Scholar]
- Zhao, X.; Ma, X.; Liao, H.; Xiong, Y.; Xu, Y.; Chen, J. Design of flower transplanting mechanisms based on double planet carrier non-circular gear train with complete rotation kinematic pair. Int. J. Agric. Biol. Eng. 2022, 15, 9–15. [Google Scholar] [CrossRef]
- Zhou, M.; Shan, Y.; Xue, X.; Yin, D. Theoretical analysis and development of a mechanism with punching device for transplanting potted vegetable seedlings. Int. J. Agric. Biol. Eng. 2020, 13, 85–92. [Google Scholar] [CrossRef]
- Zhou, M.; Sun, H.; Xu, X.; Yang, J.; Wang, G.; Wei, Z.; Xu, T.; Yin, J. Study on the Method and Mechanism of Seedling Picking for Pepper (Capsicum annuum L.) Plug Seedlings. Agriculture 2023, 14, 11. [Google Scholar] [CrossRef]
- Zhou, M.; Yu, G.; Zhao, Y.; Hu, H.; Liao, Z.; Zhao, X. Parameter optimization and test on pick-up mechanism of planetary gear train with ellipse gears for vegetable plug seedling. Trans. Chin. Soc. Agric. Eng. 2014, 30, 13–21, (In Chinese with English Abstract). [Google Scholar]
- Yu, G.; Yu, T.; Ye, B.; Hu, H.; Wang, L. Design of a Rotary Plug Seedling Pick-up Mechanism. J. Mech. Eng. 2015, 51, 67–76, (In Chinese with English Abstract). [Google Scholar]
- Ye, B.; Zeng, G.; Deng, B.; Yang, C.; Liu, J.; Yu, G. Design and tests of a rotary plug seedling pick-up mechanism for vegetable automatic transplanter. Int. J. Agric. Biol. Eng. 2020, 13, 70–78. [Google Scholar] [CrossRef]
- Riaza, H.; Foix, S.; Nebot, L. The synthesis of an N-Lobe noncircular gear using Bezier and B-Spline Nonparametric curves in the design of its displacement law. J. Mech. Des. 2007, 129, 981–985. [Google Scholar]
- Zhou, M.; Yang, Y.; Wei, M.; Yin, D. Method for generating non-circular gear with addendum modification and its application in transplanting mechanism. Int. J. Agric. Biol. Eng. 2020, 13, 68–75. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Module | Tooth Number | Center Distance | Pressure Angle | Tooth Width | Tooth Top Height Coefficient | Top Clearance Coefficient |
|---|---|---|---|---|---|---|
| 2.4023 | 32.0000 | 103.2827 | 20.0000 | 10.0000 | 1.0000 | 0.2500 |
| Picking Angle | Feed Angle | Angle Difference | Protrude Length | Angle between Picking Arm and Seedling | Angle of Seedling Needles |
|---|---|---|---|---|---|
| −26.22° | −59.34° | −33.12° | 30 mm | 16.78° | 46° |
| Picking Arm I | Picking Arm II | Picking Arm III | |
|---|---|---|---|
| Picking | 6° | 246° | 126° |
| Feeding | 245° | 125° | 5° |
| Planetary Carrier Angle | Theoretical Trajectory Coordinate Points | Simulation Trajectory Coordinate Points | Euclidean Distance | |
|---|---|---|---|---|
| 0 | 0° | (255.928, 26.915) | (255.928, 26.915) | 0.0000 |
| 1 | 15° | (255.172, 28.608) | (255.141, 29.757) | 1.1494 |
| 2 | 68° | (194.487, 78.68) | (194.263, 76.803) | 1.8906 |
| 3 | 90° | (154.957, 99.649) | (154.874, 97.484) | 1.1668 |
| 4 | 105° | (129.91, 105.788) | (129.956, 103.576) | 2.2122 |
| 5 | 159° | (57.889, 59.098) | (57.972, 58.203) | 0.8987 |
| 6 | 180° | (51.661, −4.178) | (51.642, −3.538) | 0.6405 |
| 7 | 199° | (50.403, −75.893) | (50.766, −74.532) | 1.4086 |
| 8 | 227° | (61.693, −153.156) | (61.199, −153.945) | 0.9307 |
| 9 | 270° | (148.69, −147.045) | (147.825, −149858) | 2.9429 |
| 10 | 291° | (189.59, −112.059) | (189.250, −115.198) | 3.1575 |
| 11 | 344° | (246.02, 18.2) | (246.619, 16.330) | 1.6935 |
| 12 | 360° | (255.928, 26.915) | (255.932, 26.89) | 0.0276 |
| Input Point | Input Component | Output Point | Output Component |
|---|---|---|---|
| I0.0 | Emergency Stop Button | Q0.0 | Pulse Output Port of the Horizontal Stepper Motor Driver |
| I0.2 | Start Position Switch | Q0.1 | Pulse Output Port of the Vertical Stepper Motor Driver |
| I0.3 | End Position Switch | Q0.2 | Start Signal Output Port for the Transplanting Mechanism Motor |
| I0.4 | Counting Switch | Q0.3 | Direction Output Port of the Horizontal Stepper Motor Driver |
| I0.5 | Stop Button | Q0.4 | Direction Output Port of the Vertical Stepper Motor Driver |
| I0.6 | Start Button |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhou, M.; Xu, T.; Wang, G.; Dong, H.; Yang, S.; Wang, Z. Design of a 2R Open-Chain Plug Seedling-Picking Mechanism and Control System Constrained by a Differential Non-Circular Planetary Gear Train. Agriculture 2024, 14, 1576. https://doi.org/10.3390/agriculture14091576
Zhou M, Xu T, Wang G, Dong H, Yang S, Wang Z. Design of a 2R Open-Chain Plug Seedling-Picking Mechanism and Control System Constrained by a Differential Non-Circular Planetary Gear Train. Agriculture. 2024; 14(9):1576. https://doi.org/10.3390/agriculture14091576
Chicago/Turabian StyleZhou, Maile, Tingbo Xu, Guibin Wang, Herui Dong, Shiyu Yang, and Zeliang Wang. 2024. "Design of a 2R Open-Chain Plug Seedling-Picking Mechanism and Control System Constrained by a Differential Non-Circular Planetary Gear Train" Agriculture 14, no. 9: 1576. https://doi.org/10.3390/agriculture14091576