


Enhancing the Stability of Small Rescue Boats: A Study on the Necessity and Impact of Hydraulic Interconnected Suspensions

Abstract
:1. Introduction
2. Design of Hydraulic Interconnected Suspension System
2.1. Operational Area Analysis and Wave Condition Adaptation for Rescue Boats
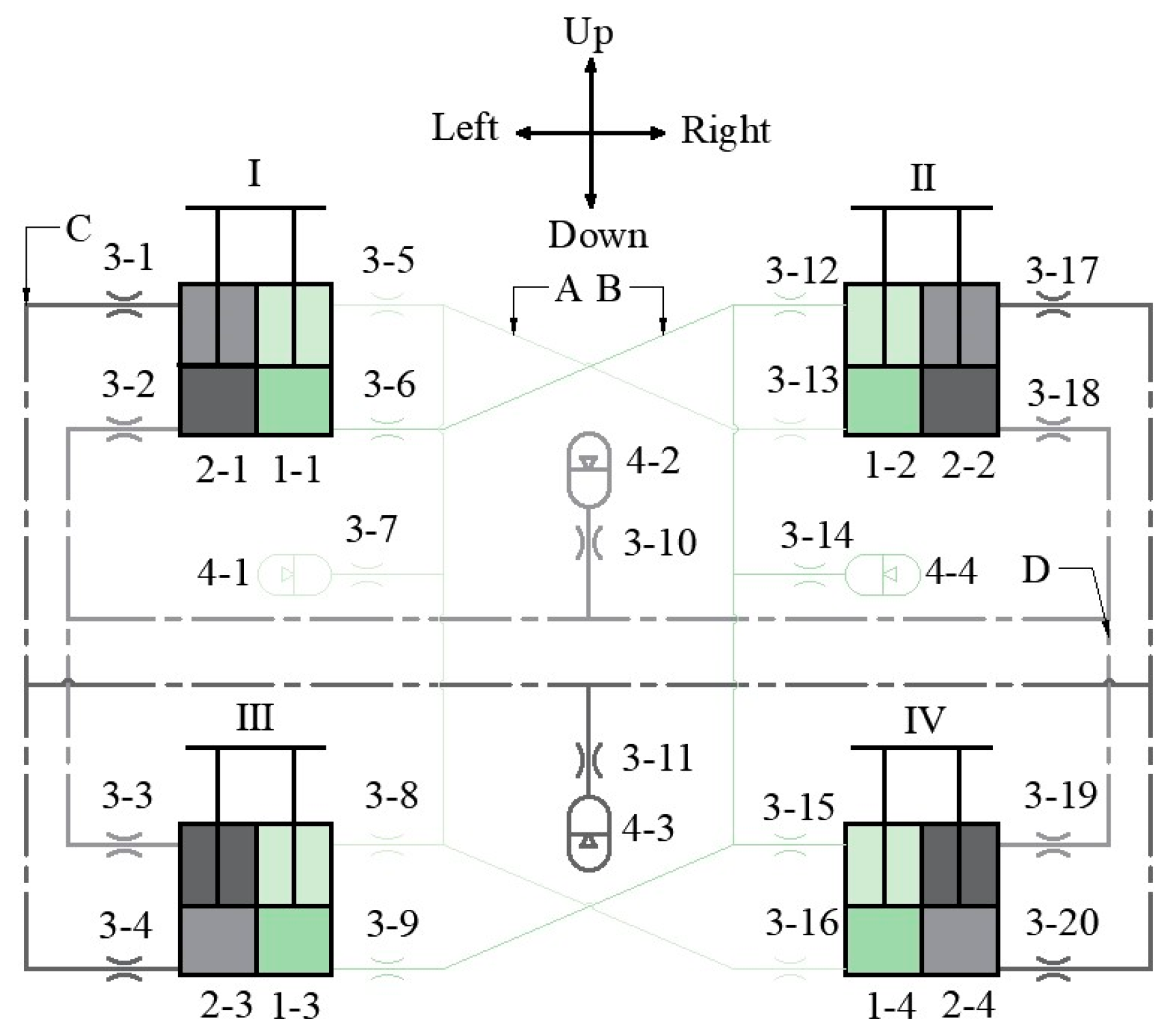
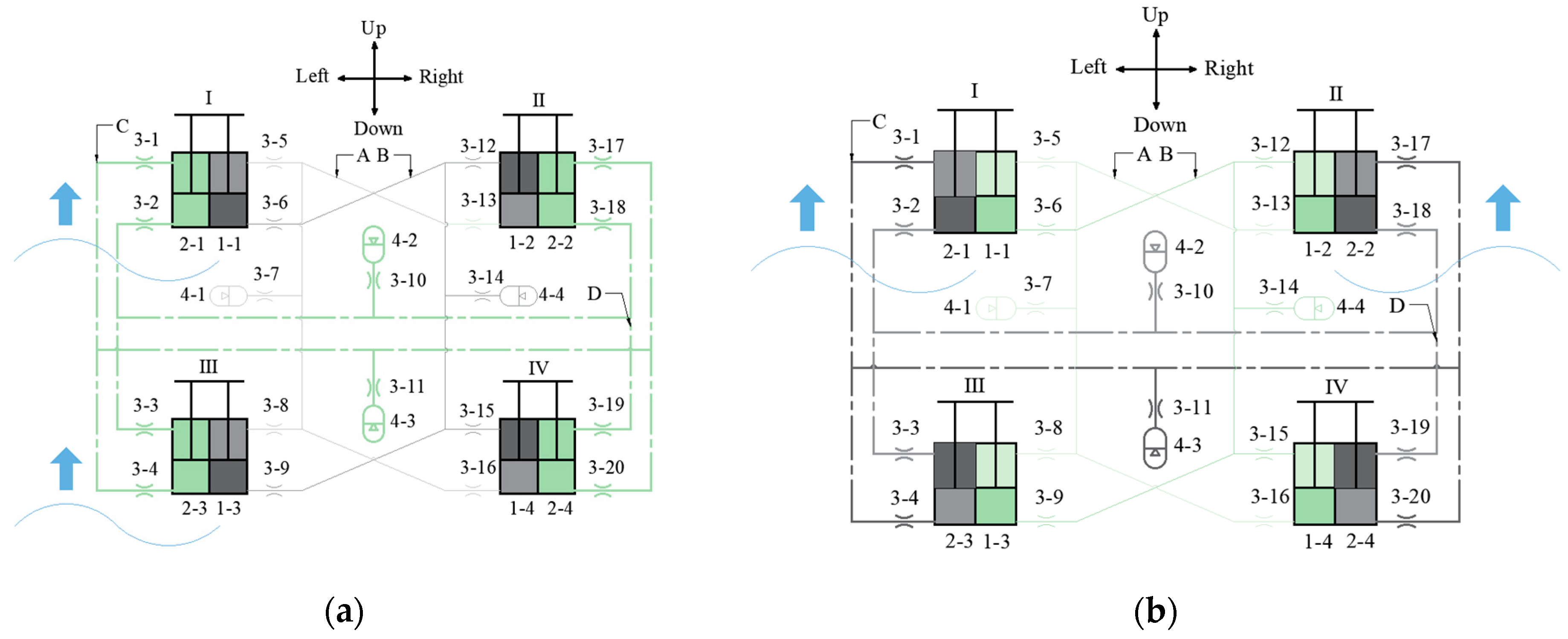
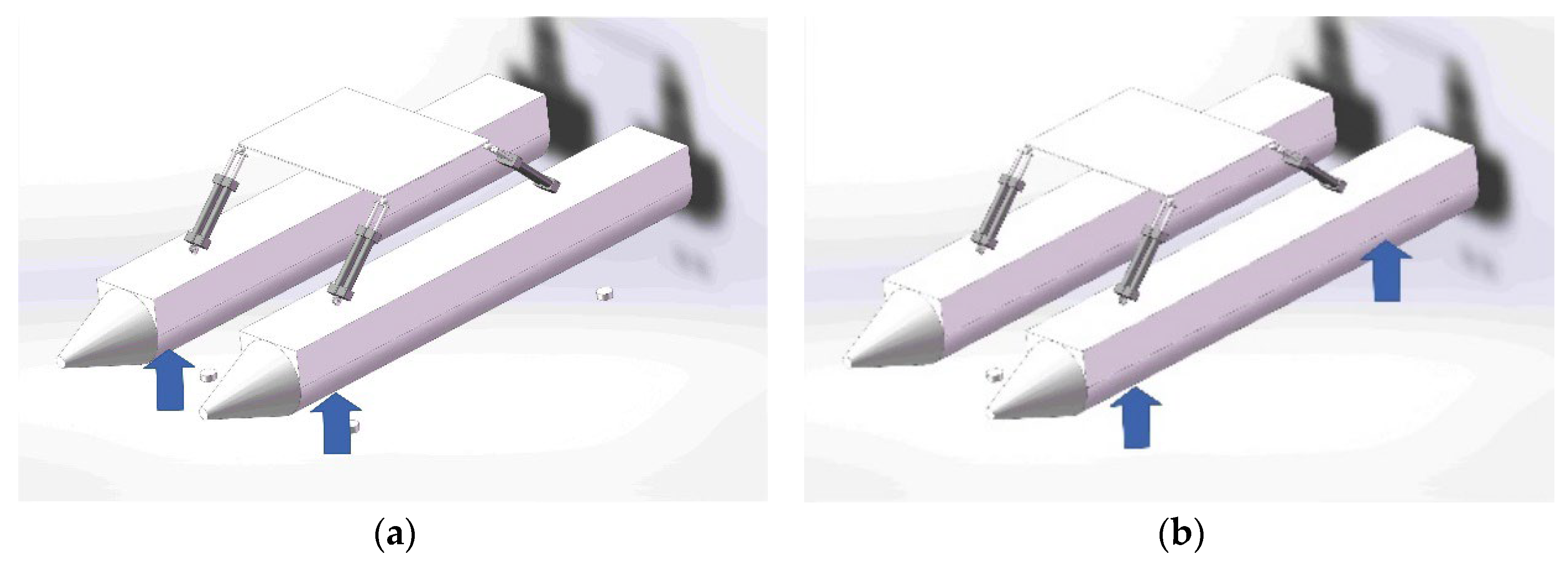
2.2. Analysis of the Working Principle of Suspension System
3. Modeling and Simulation of Interconnected Suspension System Dynamics
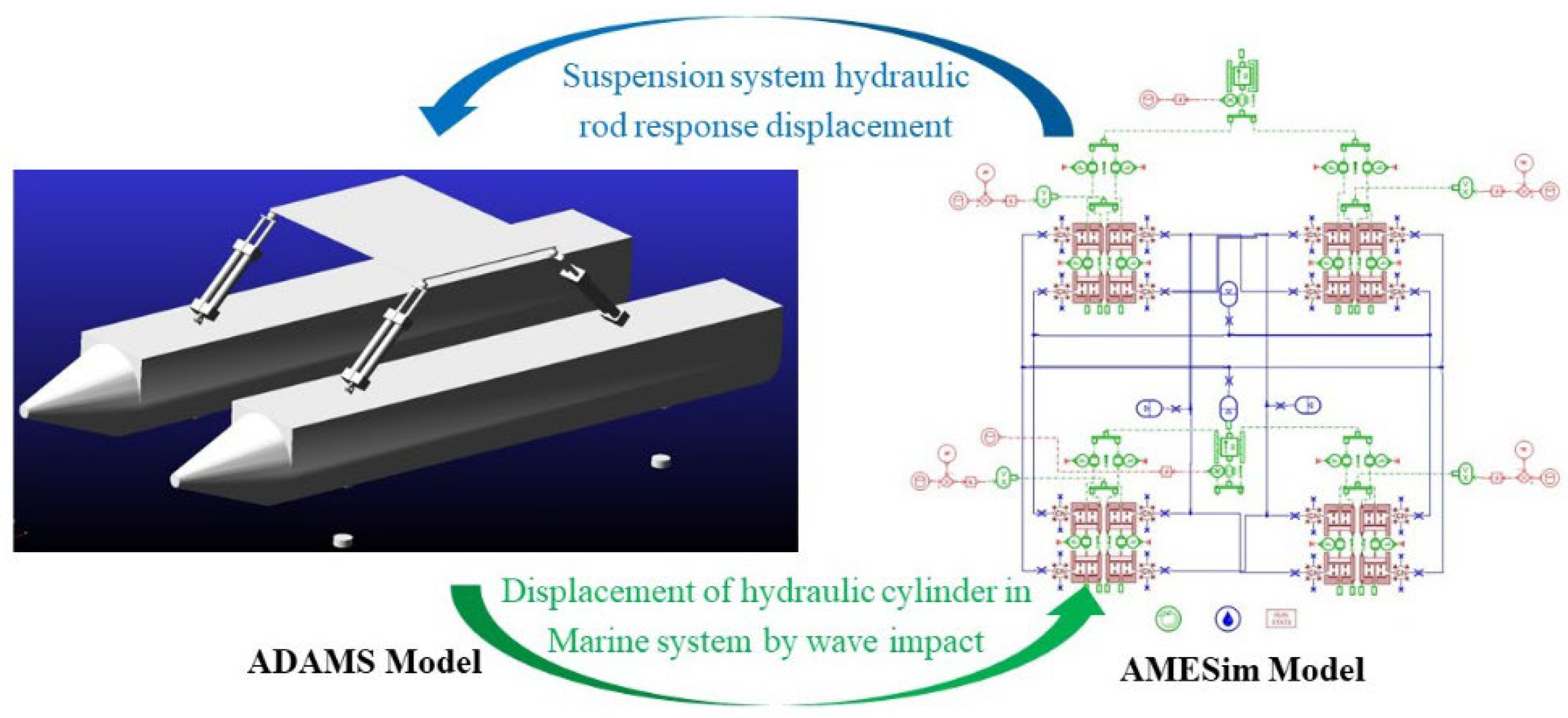
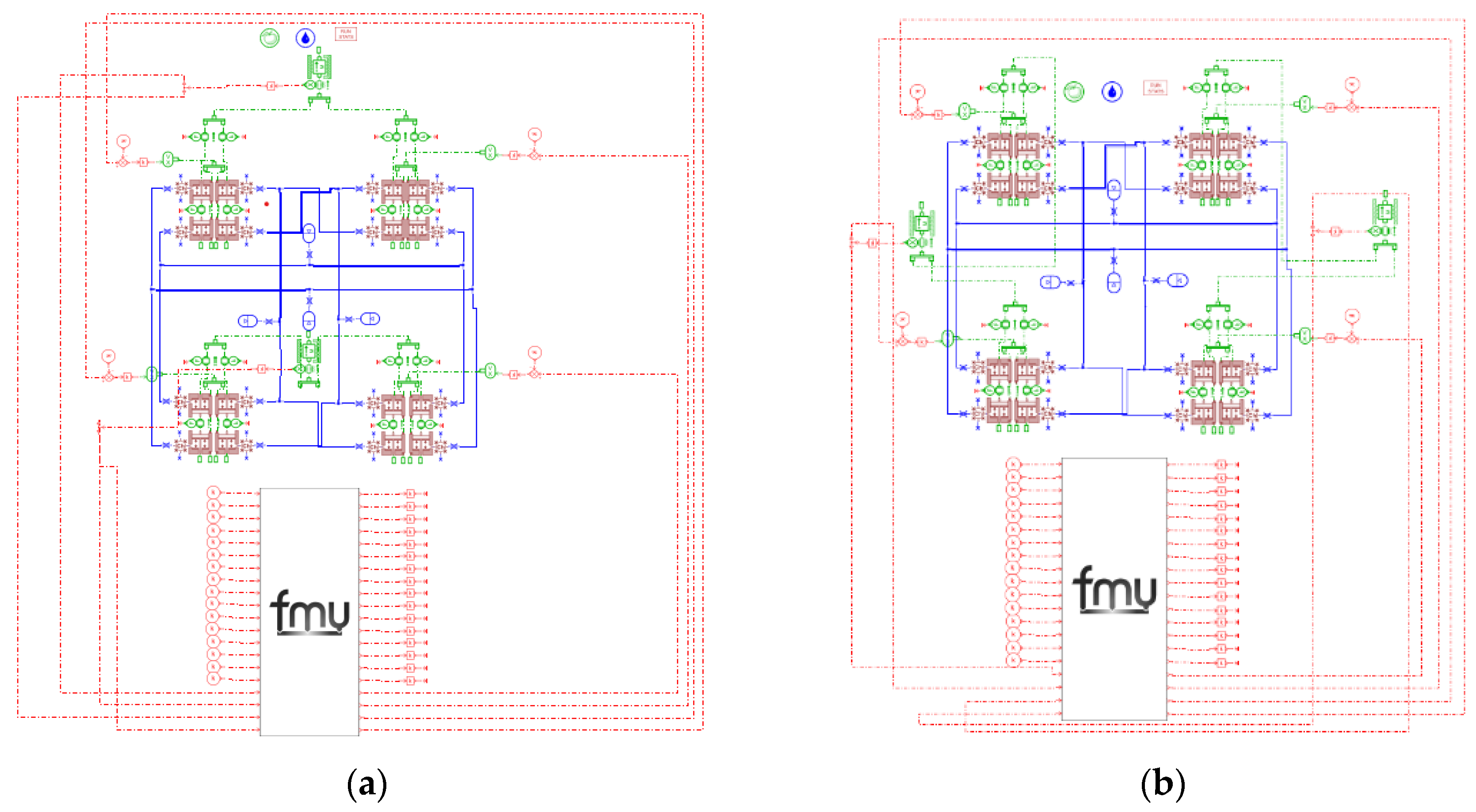
3.1. Joint Simulation Model Modeling
3.2. Multi-Operating Condition Simulation
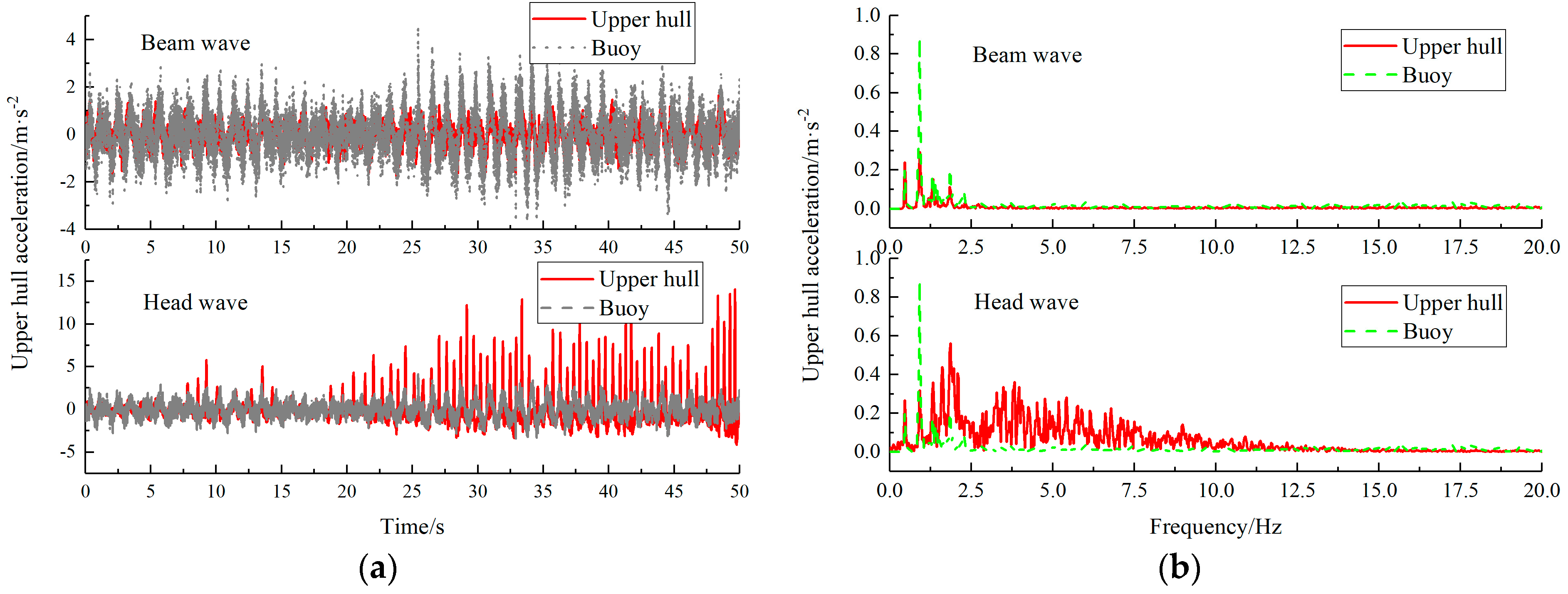
3.2.1. Top Wave Impact
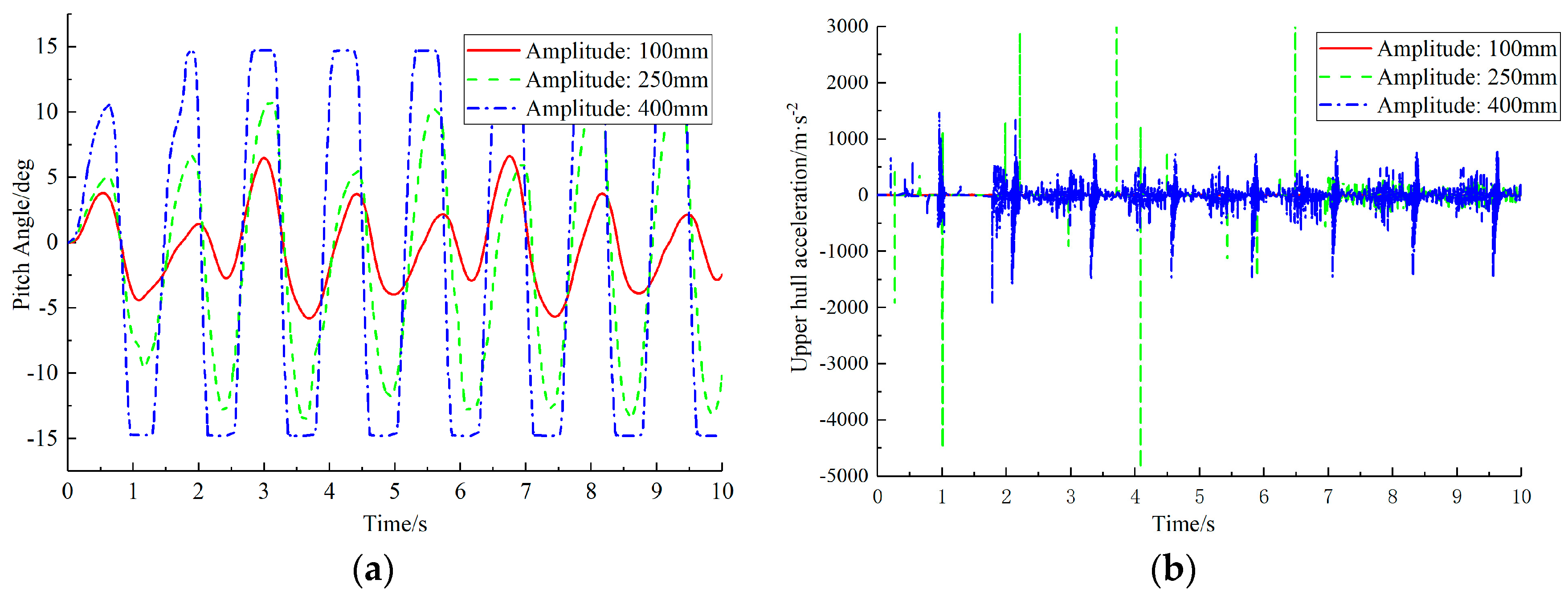
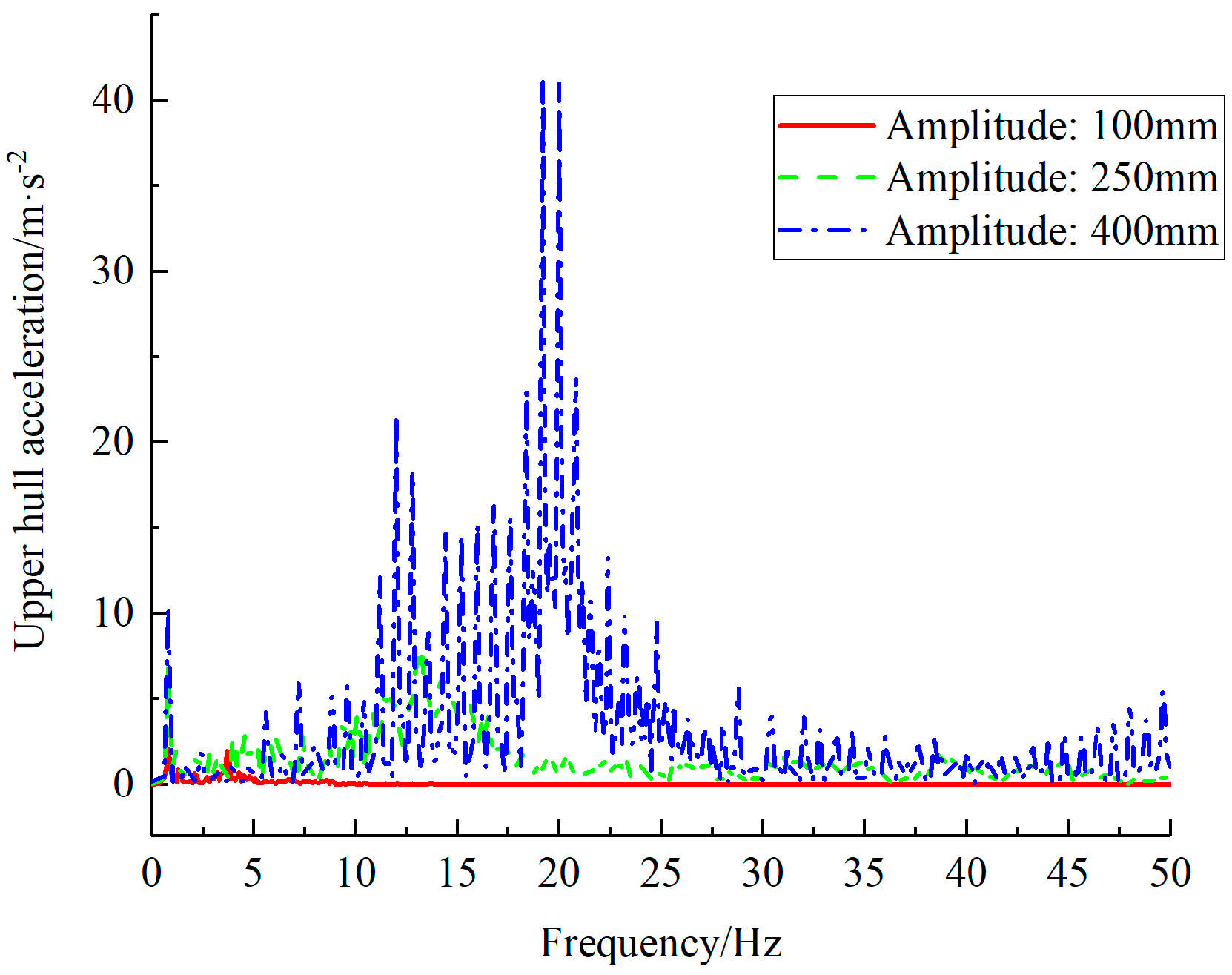
- Different Wave Grades
- 2.
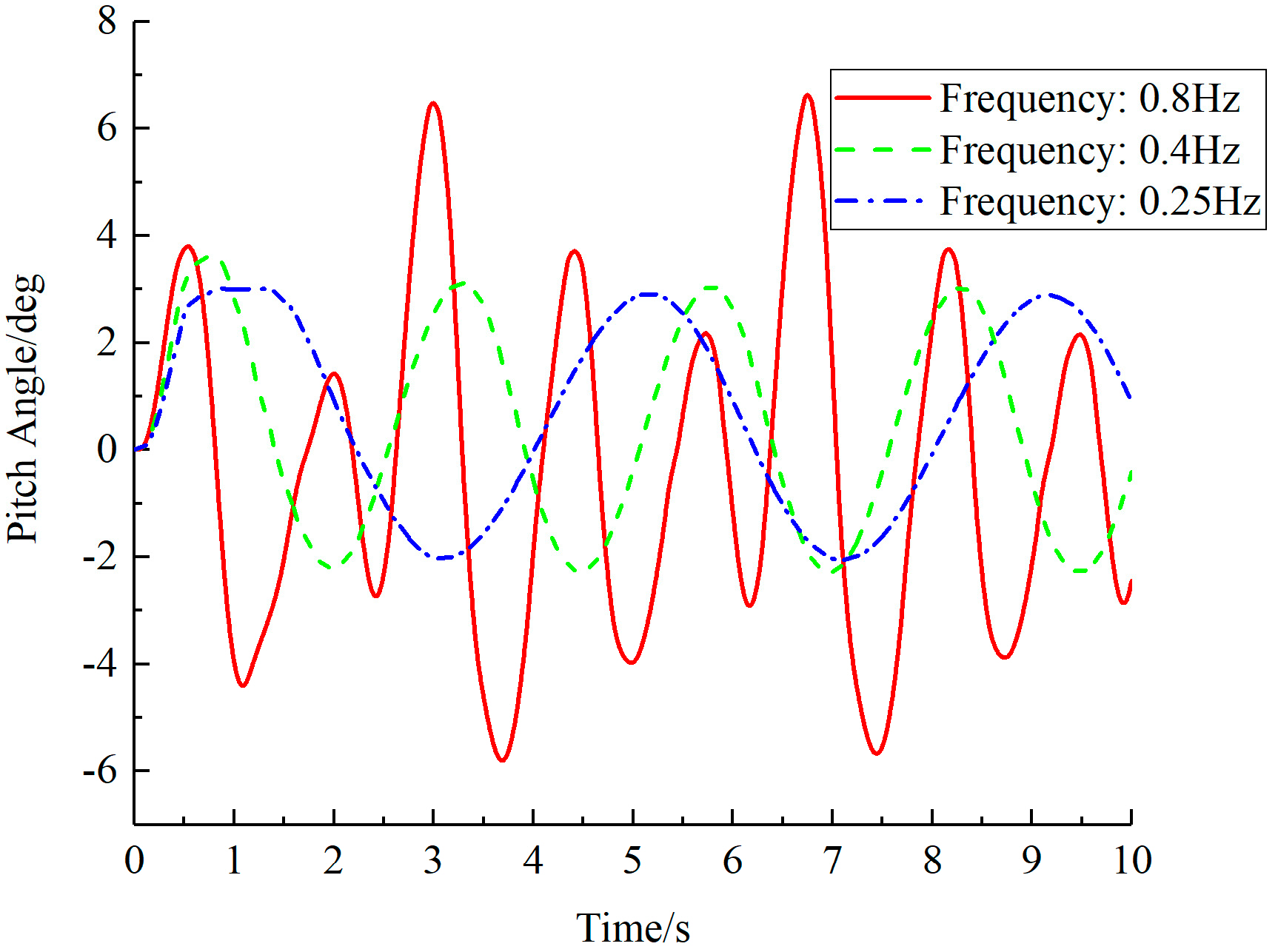
- Different wave frequency domains
3.2.2. Horizontal Wave Impact
- Different Wave Grades
- 2.
- Different Wave Frequency Domains
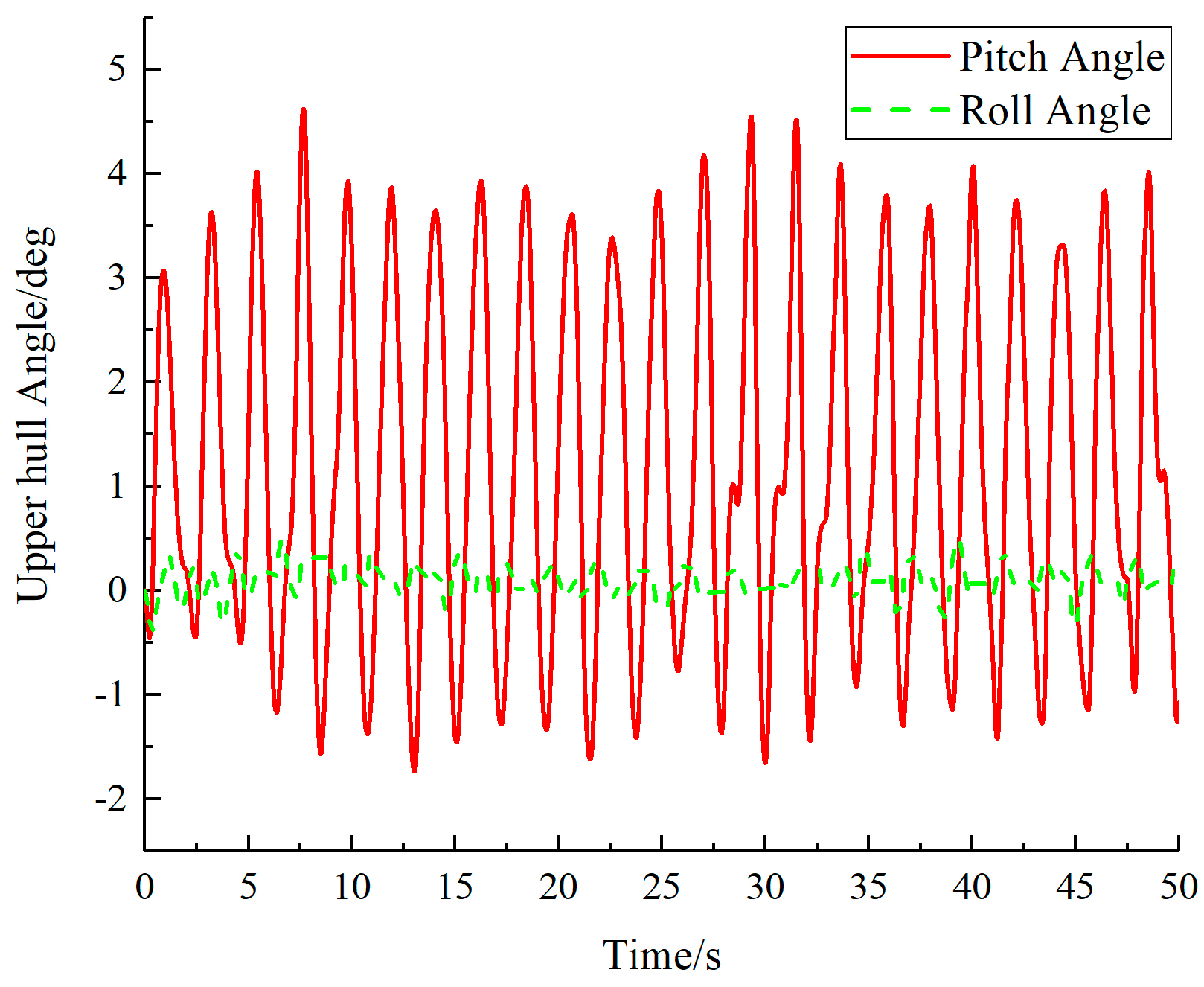
3.2.3. Wave Impact
4. Experimental Research
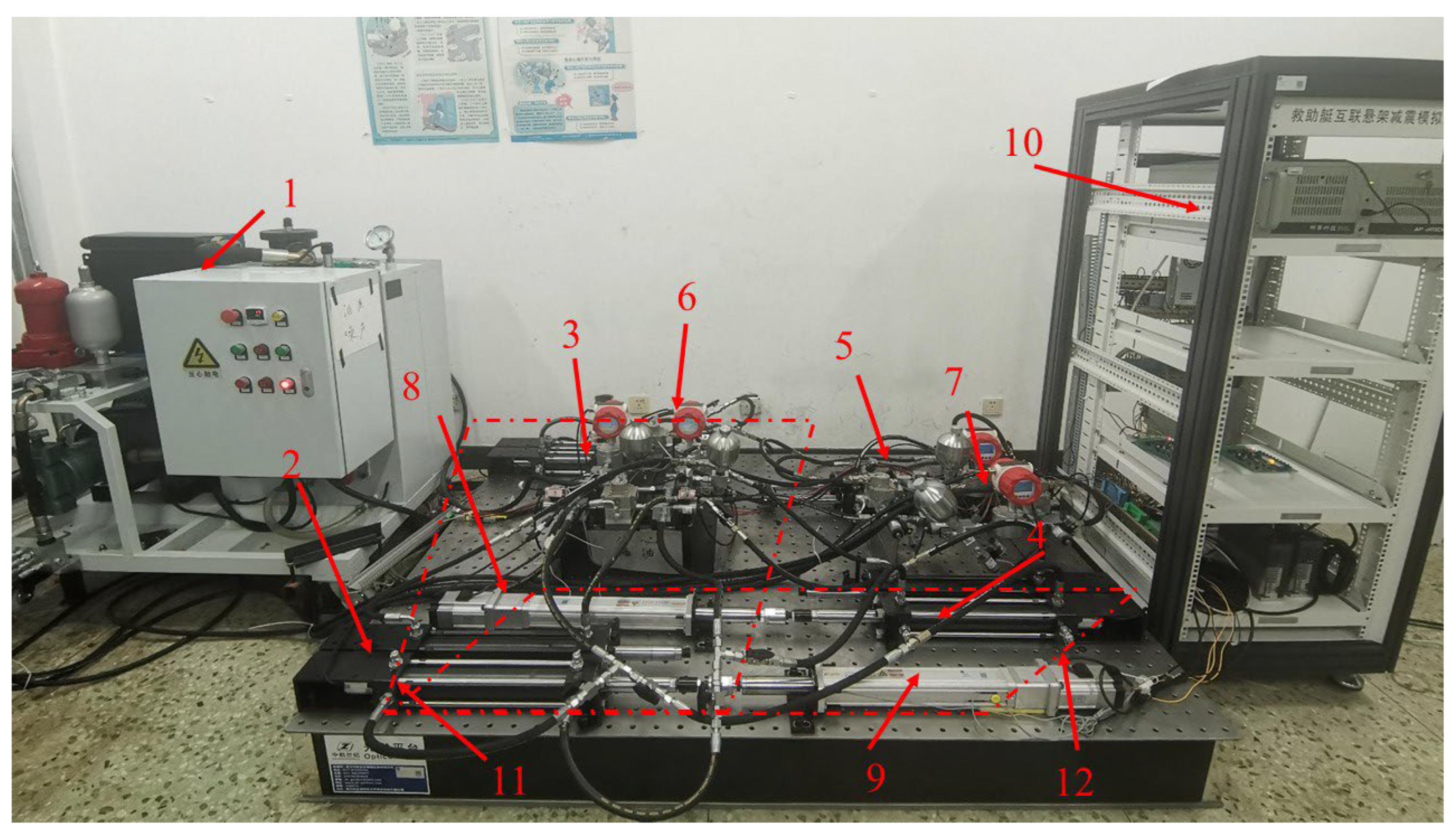
4.1. Test Bench Construction
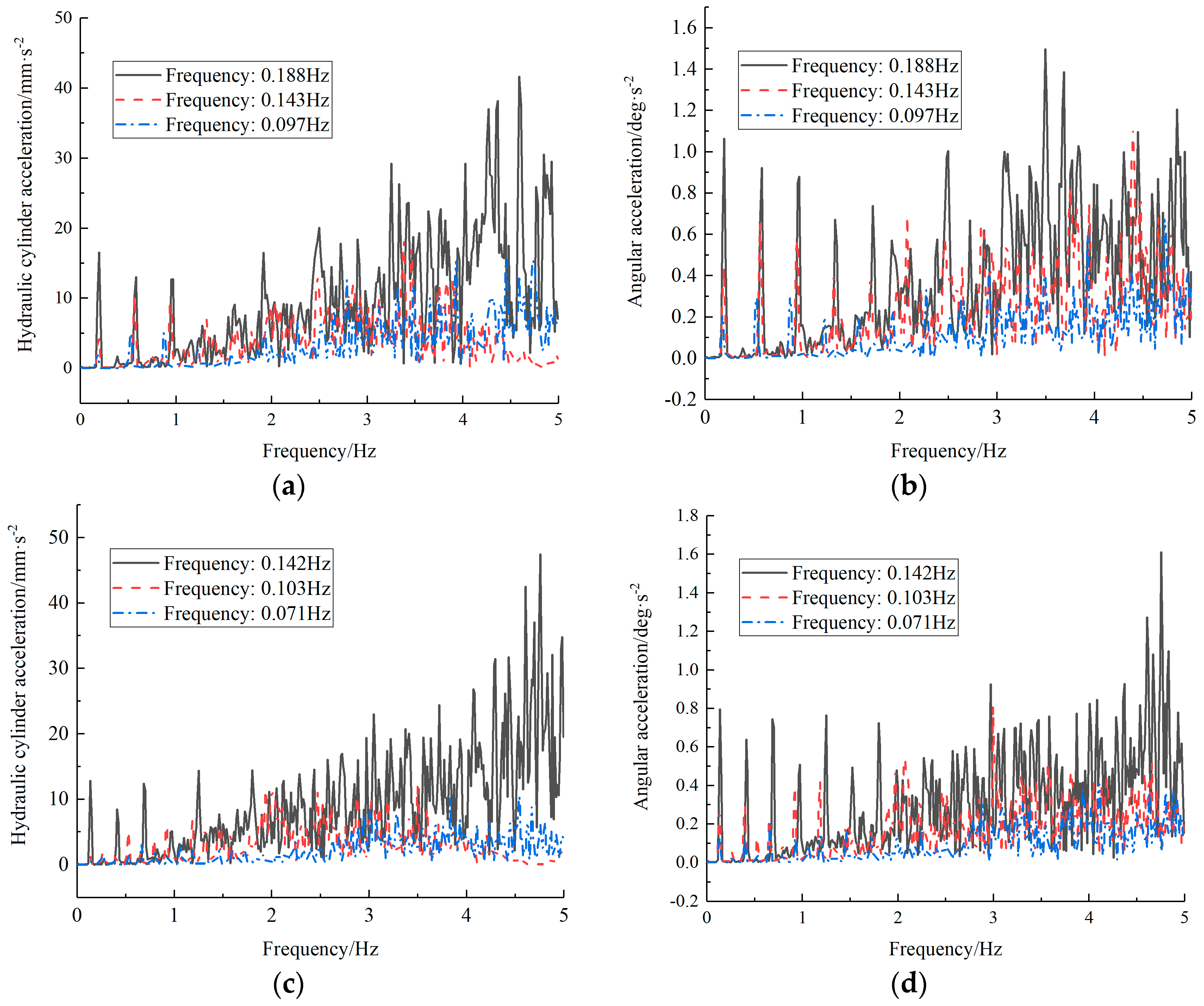
4.2. Research on Coupling Test of Interconnected Suspension
- Different amplitudes
- 2.
- Different frequencies
5. Conclusions
- When faced with simultaneous impacts from crosswaves and headwaves, the parallel interconnected suspension system exhibits excellent anti-roll performance. Compared to traditional truss-type rescue vessels, the suspension system achieves an 81.5% improvement in anti-roll capability and a 25.0% improvement in anti-pitch capability. The suspension system is greatly influenced by headwave impacts and wave levels, and it exhibits significant damping effects on low-frequency impacts. Compared to previous interconnected loops, the parallel interconnected suspension system reduces the coupling of suspension loops, decreases the number of intermediate components, lowers costs, and simplifies system control. When facing low-frequency and high-amplitude waves, the suspension system maintains good stability and ride comfort with excellent damping effects.
- The 1/2 parallel interconnected suspension system achieves approximately 40% displacement compensation, demonstrating its insensitivity to low-frequency impacts. By combining the relative advantages of anti-pitch and anti-roll interconnection, the suspension system exhibits good stability and damping performance, proving the feasibility and superiority of the parallel interconnected suspension system for practical sea conditions.
- The simulation models used in this paper are all mechanical structures for theoretical motion, without a detailed consideration of the hull structure in the actual ship design and manufacture, and no real ship sea test was conducted. Future research work can be carried out to fabricate the real ship prototype and verify the vibration-damping performance of the suspension system proposed in this paper through a real ship sailing test.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Fratello, J.; Ahmadian, M. Multi-body dynamic simulation and analysis of wave-adaptive modular vessels. In Proceedings of the 11th International Conference on Fast Sea Transportation, Honolulu, HI, USA, 26–29 September 2011. [Google Scholar]
- Peterson, A.W. Simulation and Testing of Wave-Adaptive Modular Vessels; Virginia Tech: Blacksburg, VA, USA, 2014. [Google Scholar]
- Pandey, J.; Hasegawa, K. Study on turning manoeuvre of catamaran surface vessel with a combined experimental and simulation method. IFAC-PapersOnLine 2016, 49, 446–451. [Google Scholar] [CrossRef]
- Conti, U.; Gundersen, M. Second generation design of wave adaptive modular vessels (WAM-V). In Proceedings of the 11th International Conference on FAST2011, Honolulu, HI, USA, 26–29 September 2011. [Google Scholar]
- Velodyne Marine—Chasing Martini 1.5 on San Francisco Bay. 2024. Available online: https://www.boats.com/reviews/the-velodyne-martini-1-5-active-suspension-on-a-boat/ (accessed on 18 March 2013).
- Nauti-Craft Marine Suspension Technology. 2017. Available online: https://www.youtube.com/watch?v=kCgVumRpLro (accessed on 5 September 2016).
- Han, J.; Maeda, T.; Kinoshita, T.; Kitazawa, D. Towing test and motion analysis of motion controlled ship—Based on an application of skyhook theory. In Proceedings of the 12th International Conference on the Stability of Ships and Ocean Vehicles (STAB2015), Glasgow, Scotland, 14–19 June 2015. [Google Scholar]
- Myers, S.; Dobbins, T.; King, S.; Hall, B.; Gunston, T.; Holmes, S.; Dyson, R. The effectiveness of shock mitigation technology in reducing motion induced fatigue in small high speed craft. In Proceedings of the Pacific International Maritime Conference (IMC), Sydney, Australia, 29–31 January 2008. [Google Scholar]
- Han, J.; Maeda, T.; Itakura, H.; Kitazawa, D. Experimental study on the wave energy harvesting performance of a small suspension catamaran exploiting the maximum power point tracking approach. Ocean Eng. 2022, 243, 110176. [Google Scholar] [CrossRef]
- Han, J.; Kitazawa, D.; Kinoshita, T.; Maeda, T.; Itakura, H. Experimental investigation on a cabin-suspended catamaran in terms of motion reduction and wave energy harvesting by means of a semi-active motion control system. Appl. Ocean Res. 2019, 83, 88–102. [Google Scholar] [CrossRef]
- Wilde, J.R.; Heydinger, G.J.; Guenther, D.A.; Mallin, T.; Devenish, A.M. Experimental evaluation of fishhook maneuver performance of a kinetic suspension system. SAE Trans. 2005, 392, 387–396. [Google Scholar]
- Wilde, J.R.; Heydinger, G.J.; Guenther, D.A. Adams simulation of ride and handling performance of the kinetic suspension. SAE Tech. Pap. 2006, 1972, 1646–4659. [Google Scholar]
- Smith, W.A.; Zhang, N. Recent developments in passive interconnected vehicle suspension. Front. Mech. Eng. China 2010, 5, 1–18. [Google Scholar] [CrossRef]
- Carlomagno, F. Modeling and Simulation of a Hydraulic Interconnected Suspension System for Automotive Applications. Doctoral Dissertation, Politecnico di Torino, Torino, Italy, 2020. [Google Scholar]
- Zapletal, E. Balanced Suspension; SAE Technical Paper; SAE International: Warrendale, PA, USA, 2000. [Google Scholar]
- i Buj, J.F. Integral suspension system for motor vehicles based on passive components. SAE Trans. 2002, 3105, 761–774. [Google Scholar]
- Smith, M.C.; Walker, G.W. Interconnected vehicle suspension. Proc. Inst. Mech. Eng. Part D. J. Automob. Eng. 2005, 219, 295–307. [Google Scholar] [CrossRef]
- Mavroudakis, B.; Eberhard, P. Mode decoupling in vehicle suspensions applied to race cars. In Proceedings of the III European Conference on Computational Mechanics: Solids, Structures and Coupled Problems in Engineering, Lisbon, Portugal, 1 January 2006. [Google Scholar]
- Wang, W.; Du, H.; Xiong, W.; Nie, Y. Sensitivity Analysis and Optimization of the Hydraulic Interconnected Suspension Damping System of a Small Rescue Craft. J. Mar. Sci. Eng. 2023, 11, 1857. [Google Scholar] [CrossRef]
- Zhang, N.; Smith, W.A.; Jeyakumaran, J. Hydraulically interconnected vehicle suspension: Background and modelling. Veh. Syst. Dyn. 2010, 48, 17–40. [Google Scholar] [CrossRef]
- Zhang, N.; Wang, L.; Hu, W. Handling analyses of a vehicle fitted with a roll-resistant hydraulically interconnected suspension. In Proceedings of the International Association of Vehicle System Dynamics Symposium, Manchester, UK, 12–14 April 2011. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Unit | Value | Quantity | |
|---|---|---|---|
| Upper hull | 820 kg | 1 | |
| Buoy | 340 kg | 2 | |
| Hydraulic cylinder | 20 kg | 4 | |
| Spring damping | Stiffness | 25.153 N∙mm−1 | 4 |
| Damping | 2.132 N∙s∙mm−1 | 4 | |
| Argument | Value | Units |
|---|---|---|
| Hydraulic cylinder inner diameter/D | 40 | mm |
| Hydraulic cylinder rod diameter/d | 22 | mm |
| Cylinder stroke/L | −200–200 | mm |
| Accumulator volume/V0 | 0.35 | L |
| Accumulator pre-charge pressure/Pgas | 1.5 | MPa |
| Throttle aperture/r | 10 | mm |
| Front/rear suspension mass/m1 | 410 | kg |
| Left/right hanging mass/m2 | 410 | kg |
| Static friction force/F | 600 | N |
| System dynamic friction coefficient/Vf | 50 | N·mm·s−1 |
| Number | Name | Model Number | Main Parameter | Quantity |
|---|---|---|---|---|
| 1 | Hydraulic pump | YBZ-20-17S | Maximum flow rate 35 L/min Maximum pressure 17 MPa Tank volume 160 L | 1 |
| 2 | Servo valve | FF-131/100 MKZ801F.14-115 | Servo amplifier MK2801F.14 | 4 |
| 3 | Proportional valve | KKDSR1PB/HCG24N0K4V | 0–24 V DC control voltage | 2 |
| 4 | accumulator | GXQB 3.5 L/21 MPa LY | Nominal volume 3.5 L | 4 |
| 5 | flowmeter | WT10VGALB | 0–5 V voltage signal | 4 |
| 6 | Solenoid valve | DTDF-MC(H)N-224 34 L/min T-162A | Maximum flow rate 40 L/min Maximum pressure 35 MPa | 16 |
| 7 | Pressure sensor | MIK-P300-2.5 MPa-V1-B4-C1-J1P1 | 0–5 V voltage signal | 4 |
| 8 | Displacement sensor | KYDM-L | 0–24 V voltage signal | 8 |
| 9 | Hydraulic cylinder | SFQ50/36-300NZ1D | Inner/outer diameter: 30 mm/50 mm stroke 300 mm | 8 |
| 10 | Servo cylinder | XINJE DS5F-20P7-PTA | Rated power 750 kw maximum output power 6 kN | 2 |
| Excitation amplitude | 30 mm | 50 mm | 70 mm | |
| Wave class | 1 class | 2 class | 3 class | |
| Displacement compensation | Forward impact | 15.0% | 4.4% | 8.8% |
| Negative impact | 39.1% | 49.9% | 56.7% | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mu, X.; Du, H.; Wang, W.; Xiong, W. Enhancing the Stability of Small Rescue Boats: A Study on the Necessity and Impact of Hydraulic Interconnected Suspensions. J. Mar. Sci. Eng. 2024, 12, 1074. https://doi.org/10.3390/jmse12071074
Mu X, Du H, Wang W, Xiong W. Enhancing the Stability of Small Rescue Boats: A Study on the Necessity and Impact of Hydraulic Interconnected Suspensions. Journal of Marine Science and Engineering. 2024; 12(7):1074. https://doi.org/10.3390/jmse12071074
Chicago/Turabian StyleMu, Xiaochun, Hongwang Du, Wenchao Wang, and Wei Xiong. 2024. "Enhancing the Stability of Small Rescue Boats: A Study on the Necessity and Impact of Hydraulic Interconnected Suspensions" Journal of Marine Science and Engineering 12, no. 7: 1074. https://doi.org/10.3390/jmse12071074