Abstract
Aiming at the problem of path planning for autonomous underwater vehicle (AUV) to cope with the influence of obstacles and eddies in complex marine environments, a path planning method based on an improved salp swarm algorithm (ISSA) is proposed. Firstly, the motion model of the AUV and eddy current model are constructed, including the relationship between position, velocity, attitude, and control inputs. Secondly, the improved SSA is proposed, which introduces the Levy flight strategy to enhance the algorithm’s optimization seeking ability and adds a nonlinear convergence factor to enhance the convergence ability of the algorithm. The stability and robustness of the improved algorithm are verified by test functions. Finally, the ISSA is applied to AUV path planning, which optimizes the AUV travel distance, improves the search efficiency and accuracy, and avoids the local optimum of the algorithm. The ISSA enhances the adaptive ability and robustness of the algorithm by introducing a dynamic adjustment strategy and feedback mechanism. Experimental verification is carried out using a simulated marine environment. The results show that the ISSA is better than the traditional algorithm in terms of path length as well as algorithm stability, and can effectively improve the navigation performance of AUV.
1. Introduction
AUV is a kind of autonomous underwater robot, which is mainly used for ocean exploration and data collection, and has a wide range of applications in the exploration and exploitation of marine resources as well as marine defense and security. AUV carries a variety of sensors to observe and acquire marine information on a large scale, which plays an important role in the development of marine resources and the prevention of disasters [1]. AUV is an important tool for marine research, which can perform observation missions in the ocean for long periods of time due to their unique mode of operation and efficient energy utilization. Up to now, AUV has been used in the fields of marine biology, chemistry and physics research, including the detection of parameters such as ocean temperature, salinity and oxygen content [2,3].
AUV, a new type of underwater robot, utilizes the change in its internal buoyancy system to float and dive, and the change of the center of mass by the internal weight shifting device to control the forward direction. AUV has no conventional propulsion and utilizes the natural flow of the ocean to assist in its movement. This mode of operation significantly reduces energy consumption, so the AUV has the advantages of low energy consumption, low noise, wide range of activities, and long-term continuous observation [4,5]. AUV plays a vital role in marine safety and provides accurate real-time measurements for ocean data analysis, prediction, model building, and optimization by collecting complex ocean information [6,7,8].
The underwater environment of the ocean is extremely complex. Complex ocean currents and extreme meteorological conditions may cause the AUV to deviate from its intended route. In the actual observation mission, precise navigation is needed to follow the predetermined route in order to make the AUV arrive at the target sea area accurately for sampling. Path planning is particularly important to ensure that AUV can fulfill their exploration tasks efficiently and accurately [9,10]. Reasonable path planning not only improves the detection efficiency of AUVs but also reduces their energy consumption and operating costs.
The development of path planning technology is vital for enhancing the precision, reducing the operational timeframe, and decreasing the energy expenditure of AUVs. Such advancements are particularly important for the standardized use of AUVs in future applications [11]. At present, AUV path planning methods mainly include traditional algorithms, intelligent optimization algorithms, and multi-algorithm fusion. In practical applications, path planning also needs to take into account the integration and application of key technologies such as environment reconstruction technology, environment sensing technology, intelligent decision-making technology, and underwater localization technology [12].
The AUV, as an important ocean observation tool, and its path planning research have made remarkable development in recent years. For the complex marine environment, reasonable path planning to ensure that AUVs can accurately and efficiently collect the required data helps AUVs to avoid obstacles to ensure their own safety, and can ensure the quality of the mission completion under the premise of reducing energy consumption and extending the range [13,14]. In paper [15], the principles, advantages and disadvantages of AUV modeling and path search techniques are summarized. In addition, this paper visualizes the experimental environment, real-time performance, and path planning range of AUVs.
In the referenced paper [16], a comprehensive review of various path planning strategies for AUVs is presented, taking into account the inherent predictability and unpredictability of underwater environments. The paper delves into algorithms designed for both single and multiple AUVs, tailored to operate in environments that can be either predictable or unpredictable. In a particular paper [17], an advanced algorithm for AUV path planning is introduced, which is founded on the Deep Deterministic Policy Gradient (DDPG) methodology. This sophisticated end-to-end path planning algorithm is designed to directly optimize the decision-making policy. The algorithm operates by processing sensory data it receives as input and subsequently generating output in the form of the vehicle’s travel speed and the angle at which it should navigate through the underwater environment. In paper [18], a hybrid path planning algorithm considering AUV dynamic constraints based on the improved A* algorithm and Artificial Potential Field (APF) algorithm for AUVs is conducted, highlighting the synergy between traditional algorithms like A* and APF to improve path accuracy, efficiency, and obstacle avoidance by incorporating AUV dynamics and trajectory predictions. Zhang et al. [19] proposed a multi-AUV full-coverage path-planning algorithm using intuitionistic fuzzy decision-making to address challenges in collaborative search operations. The approach involves constructing a state space model of the search environment using a raster method, and applying intuitionistic fuzzy decision-making to handle uncertain underwater information and plan paths. Fuli Sui et al. [20] presented a solution for the multi-task path planning problem of AUVs, which is crucial for applications like oil spill detection in complex 3D ocean environments with obstacles. A bi-level multi-objective path planning model was proposed to minimize path length and dangerous distance. The model was solved using a bi-layer hybrid algorithm that combines ant colony optimization (ACO) for task sequencing, particle swarm optimization (PSO) for waypoint generation, and the A* algorithm for creating collision-free paths. Liu et al. [21] addressed the challenge of path planning for multiple AUVs tasked with missions involving numerous targets in complex underwater environments. A cooperative evolutionary computation algorithm with a bilayer encoding scheme was proposed, representing surface location points and target mission sequences. A multiple populations framework efficiently solved the optimization problem, and a recombination-based sampling strategy improved convergence.
Intelligent algorithms are of great significance to AUV path planning, which can improve the efficiency and accuracy of path planning and adapt to the complex and changing marine environment [22,23,24,25,26,27,28]. It realizes autonomous path planning and promotes the development of AUV technology. Intelligent algorithms can help AUVs quickly find the optimal or suboptimal paths in complex and changing marine environments, which significantly improves the efficiency of path planning and optimizes the performance parameters of AUVs. It helps AUVs to perform tasks safely and efficiently in complex environments. In this paper, AUV path planning based on the ISSA is proposed for the problems of stability and path length of AUV path planning [29,30]. The ISSA not only improves the efficiency and accuracy of path planning, avoids local optimal solutions, and adapts to complex environments but also enhances the scalability and generalization of the algorithm, which is of great significance to the path planning of AUV [31,32].
The following improvements can make our work more meaningful: Firstly, the motion model of AUVs and the underwater eddy current model of the ocean are constructed to simulate the motion characteristics and behaviors of AUVs, which can more accurately predict their performance in different environments. Secondly, the SSA is improved. The addition of Levy flight strategy and nonlinear convergence factor can be more applicable to the path planning of AUV. The performance of the improved algorithm, parameter optimization, and path planning is verified by some test functions to evaluate the effectiveness and robustness of the algorithm. Finally, applying the ISSA to the path planning of AUV can make the AUV adapt to the complex and changing marine environment. It not only improves the efficiency and accuracy of path planning but also reduces the errors and deviations in the actual operation and avoids the trap of falling into the optimal solution locally.
The main structure of this paper is as follows: In Section 2, the modeling of AUVs and ocean eddy is presented. In Section 3, the SSA is presented, and improvement strategies are added. Then, 2D path planning and 3D path planning for AUVs via the ISSA are simulated in Section 4. The conclusion is given in Section 5.
2. Modeling of an Underwater AUV
2.1. Construction of a Coordinate System for AUV
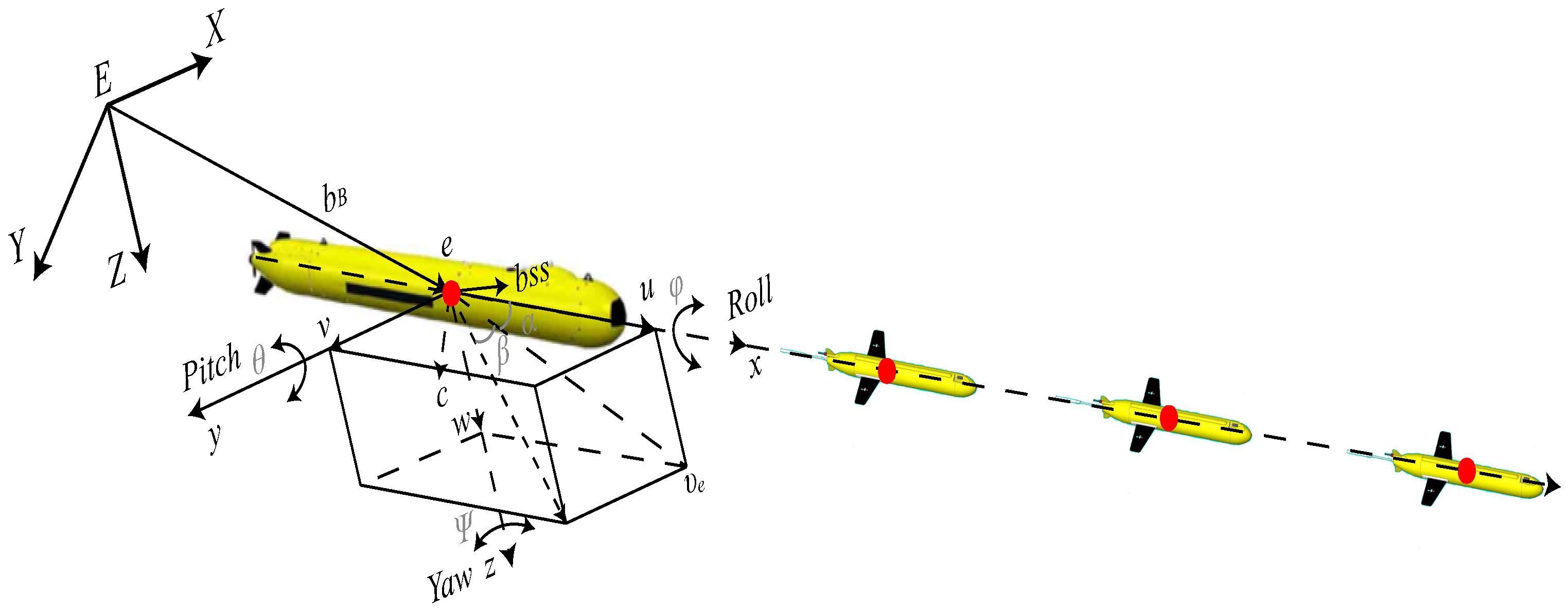
Traditional underwater robots rely on electrical energy to drive propellers and rudders, which overcome the resistance of the water to control themselves. AUVs use hydrodynamic lift and net buoyancy as driving forces to achieve motion control of the AUV. Since ocean depth and salinity affect the magnitude of its net buoyancy as the sinking depth increases, the dynamics modeling of AUV system is quite different from that of a conventional underwater robot. The motion schematic of AUV is shown in Figure 1. The AUV relies on buoyancy bladders to regulate its net buoyancy, and its direction of motion is adjusted by the movement and rotation of built-in mass blocks.
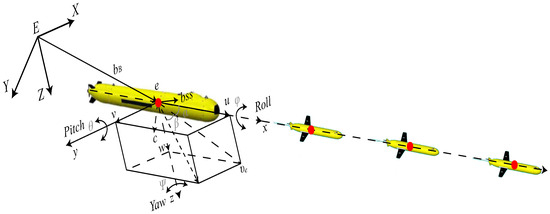
Figure 1.
Dynamic analysis diagram of the AUV. The red dot represents the centre of gravity of the AUV.
The AUV studied in this paper is a rigid body with uniform mass distribution, and the shape structure can be approximated as left–right symmetric and top–bottom symmetric. In order to study the motion of the AUV, a coordinate system is established as shown in Figure 1, where is the inertial coordinate system, and is the AUV body coordinate system with the floating center e of the AUV as the origin. In the inertial coordinate system, the AUV position vector is defined as ; the angle of attack of the attitude vector is denoted as , where , , and are the pitch, roll, and yaw angles, respectively. In the AUV body coordinate system, the angular velocity vector is defined as ; the velocity vector is defined as . In order to aspect the mutual transformation of different parameters between the two coordinate systems, the matrix facilitating the transformation of coordinates from the AUV body coordinate system to the inertial coordinate system is designated as [33]. Conversely, the matrix that allows for the transformation from the inertial coordinate system back to the AUV body coordinate system is referred to as , i.e.,
2.2. Ocean Eddy Model
The mathematical formulation of ocean eddy models usually involves the principles of fluid dynamics drink oceanography. For ocean eddies, vorticity can be defined as the spin of the velocity field. In order to study the AUV motion in a complex ocean environment, the three-dimensional ocean vortex model is defined as , where is the velocity field of the vortex, and the velocity components are in the x, y, and z directions, respectively. The components of the eddy currents are as follows:
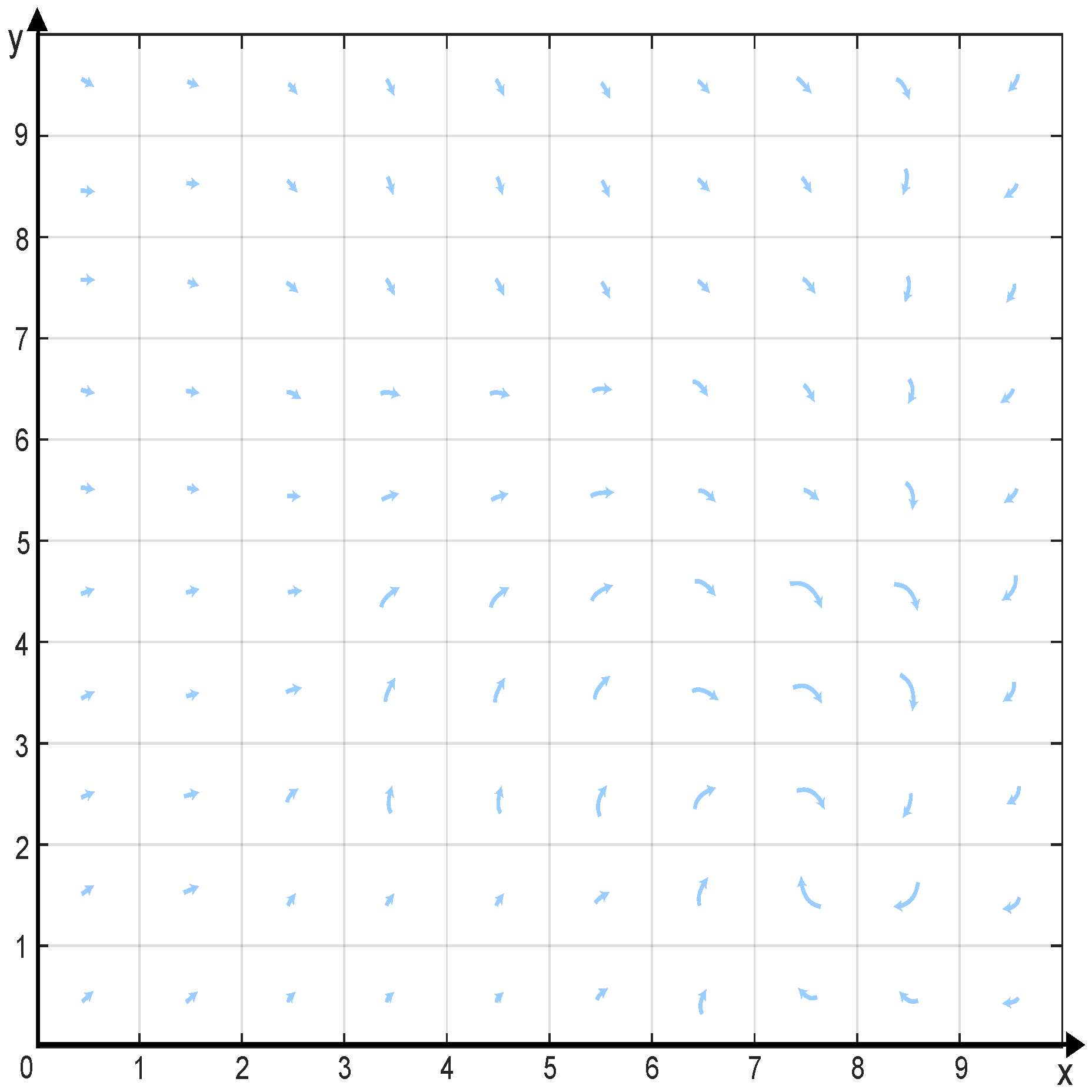
In two-dimensional eddy models (horizontal model and vertical model), the vorticity is usually considered in only one component. In a Cartesian coordinate system, the two-dimensional horizontal vorticity can be simplified as follows: , where u and v represent the velocity components along the x and y, respectively. The two-dimensional eddy is shown in Figure 2, where the partial velocity of the eddy in each direction affects the AUV trajectory.
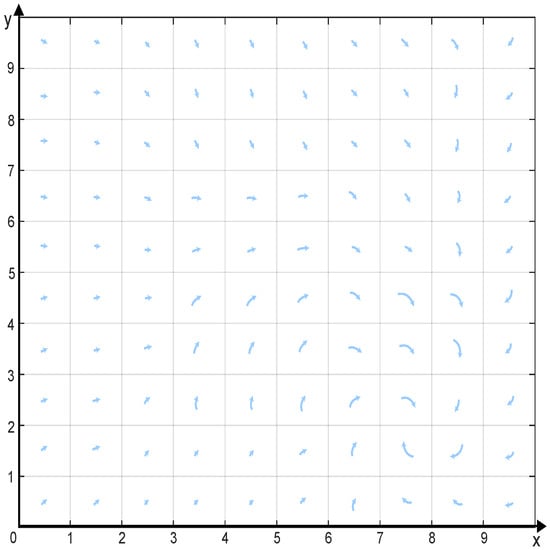
Figure 2.
The eddy current model. Arrows indicate the direction of currents.
is the vortex flow velocity in the inertial coordinate system, and is the velocity of the AUV relative to the fluid in the body coordinate system, then Equation (1) can be obtained as:
2.3. Dynamic Modeling of AUV
Based on the coordinate system and the variables of the motion model introduced, the velocity vector at the floating center of the AUV can be expressed as . In the influence of eddy currents, the velocity vector at the floating center of the AUV is in the body coordinate system. It can be derived using the coordinate transformation matrix that converts coordinates from the body coordinate system to the inertial coordinate system:
Meanwhile, the AUV angular velocity vector in the body coordinate system can be expressed as:
Equations (4) and (5) together form the motion equations of AUV. With the consideration of underwater eddy currents, the dynamic equations of the AUV can be obtained according to the momentum and momentum moment theorems. After considering the application and simplification of the dynamic equation, the dynamic equation can be expressed as follows in the body coordinate system:
where is the inertia matrix, which is the sum of the rigid body inertia matrix and the additional mass matrix; is the matrix associated with the Coriolis and centrifugal forces of the rigid body; and is the sum of all external forces and moments on the AUV. The main geometrical and physical parameters of AUVs are shown in Table 1.

Table 1.
Physical parameters and values of AUV.
3. Salp Swarm Algorithm and Improved Salp Swarm Algorithm
The SSA is a new swarm intelligence mimicry algorithm proposed by Mirjalili et al. [34] in 2017. The SSA idea originates from the swarm-chain biometric characteristics of bottle sea sheaths. It has a good global search ability, which can effectively detect the whole search space, improve the search accuracy, and save the computation time to a certain extent. The SSA mimics the group behavior of bottlenose sea squirts when they efficiently navigate and forage in the deep sea. The application scope of the SSA is very wide, mainly including scheduling problems, solving optimal combinations, optimal path solving, and so on. By improving the structure of the algorithm, the algorithm has better optimization seeking accuracy and convergence speed.
3.1. Salp Swarm Algorithm
The salp swarm is divided into leaders and followers. Leader position update and follower position update are two important steps. The leader’s position update is based on a certain formula, which involves factors such as the location of the food source, the number of current iterations, and the maximum number of iterations. The follower’s position is then updated based on the leader’s position. This iterative updating allows the SSA to continuously explore the search space to find the optimal solution. The target of salp swarm is a food source in a particular search space, denoted as G.
For the d-dimensional search space, the positions of all salp in the population are defined by a two-dimensional matrix , where n is the number of salp. Each element of matrix S corresponds to the position of the i-th bottlenose in the j-th dimension of the search space.
During the optimization process, the position of the leader in the population of bottlenose sea squirts is updated according to the source of food, which is updated as follows:
In this context, represents the location of the food source within the j-th dimension; and denote the upper and lower limits of this dimension, respectively. The parameters , , and are involved in the process, with and being random numbers that are uniformly distributed across the range [0, 1]. Selecting the critical value of as 0.5 aims to ensure fairness by equalizing the probabilities of outcomes being above or below this threshold. The specific update mechanism for given by the formula is , where ‘t’ corresponds to the current iteration within the process, and T signifies the total number of iterations allowed or planned. In the optimization process, the method of updating the follower’s position in the salp sawrm is:
where . Equations (7) and (8) simulate the group behavior of a salp searching for food by replacing the food source with a globally optimal group. However, the global optimum is unknown in an optimization problem. Therefore, the currently obtained local optimum can be considered the current global optimum. The global optimum is continuously updated during the optimization process, and the salp swarm is made to move towards the global optimum by searching the current dimension as well as expanding the search space.
3.2. Improved Salp Swarm Algorithm
3.2.1. Levy Flight Strategy
In order to increase the stochastic behavior of the population and improve the diversity of the population, the Levy flight strategy is introduced into the updating of the position of the leader of salp swarm. The Levy flight strategy is a non-Gaussian stochastic process, which is a stochastic search pattern obeying Levy distribution. Levy flight strategy is used to replace the random numbers in the original equation, which increases the range of leader position change, and thus expands the search range of the algorithm to avoid the algorithm from falling into the local optimal solution. The position update method for the leader of the salp swarm after the introduction of the Levy flight strategy is:
where d is the dimension of the position vector. can be expressed as:
where and are random numbers on the interval [0, 1]; is a constant; and takes the value . The improved algorithm expands the search range by introducing the Levy flight strategy, which can avoid the algorithm from falling into the local optimal solution and enhance the global search capability of the algorithm.
3.2.2. Nonlinear Convergence Factor
In the traditional SSA, the position update of the followers is jointly determined by the current individual and the previous one. In order to further improve the convergence ability of the algorithm, this paper introduces a nonlinear convergence factor into the original algorithm and introduces the current optimal solution into the follower’s position update equation. The improved follower’s position update method is:
where is the current optimum; D is the nonlinear convergence factor. The nonlinear convergence factor is expressed as:
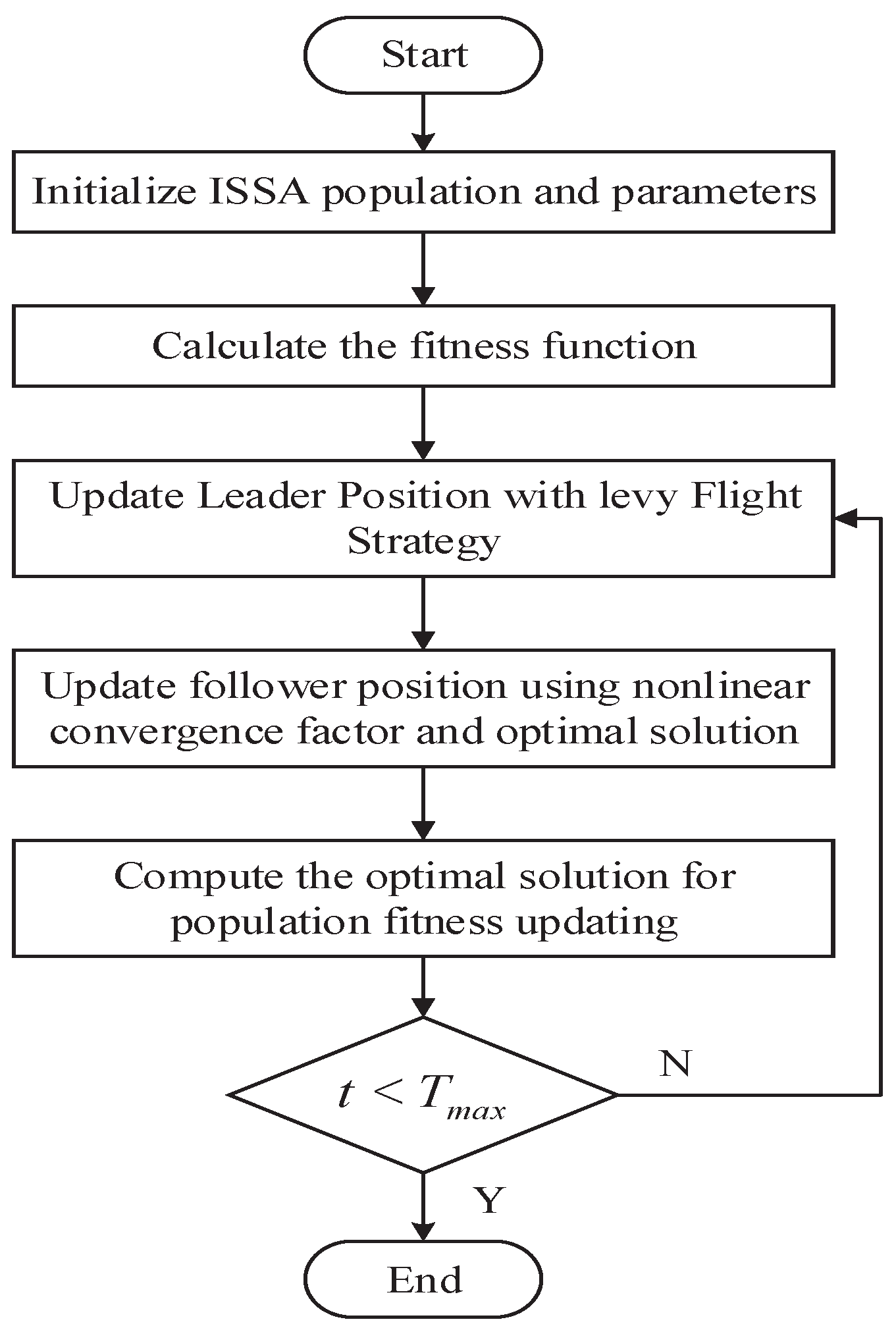
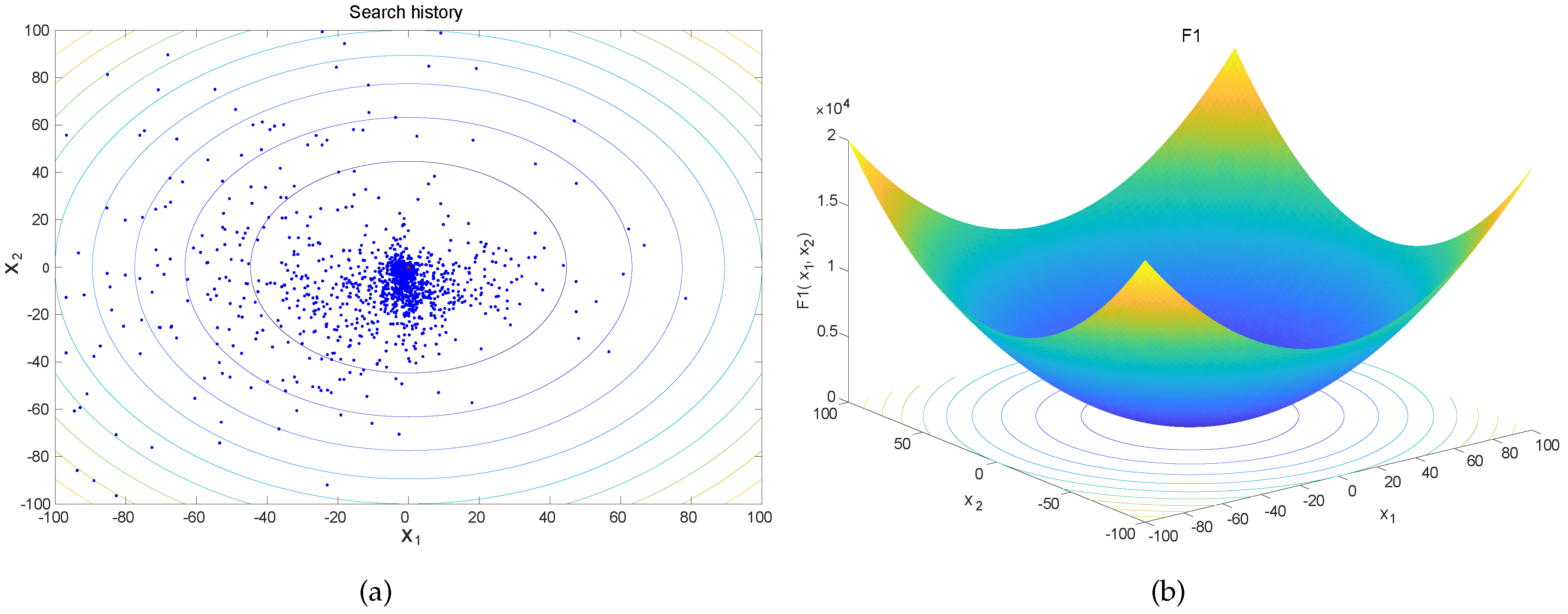
where N is the maximum number of iterations; n is the current number of iterations; and and are two learning factors. The nonlinear convergence factor adjusts the weight of the current optimal value in the follower update formula according to Equation (12) so that the algorithm searches for the optimal value near the current optimal value, which improves the algorithm’s ability to locally search for the optimal value as well as its convergence ability. In order to maximize the convergence of the algorithm path planning, is set to and is set to 1. The introduction of nonlinear convergence factors as well as the current optimal value can greatly improve the convergence ability of the algorithm, which ensures that the algorithm is capable of swiftly reaching the optimal solution. The algorithm flowchart of the ISSA is shown in Figure 3. The initialization of the ISSA is shown in Figure 4, which shows that the initial population is more concentrated, avoiding the algorithm converging to the local optimum prematurely, and ensuring that the algorithm searches for the optimum in a reasonable search space.
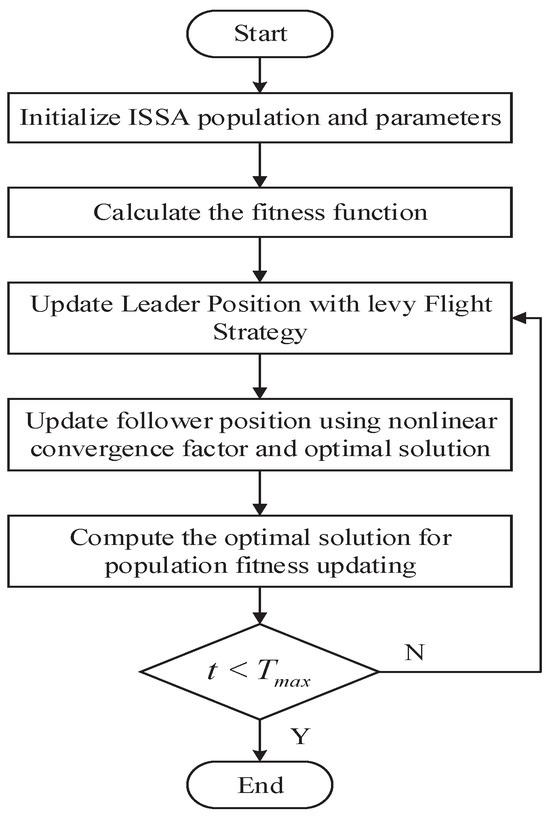
Figure 3.
Flowchart of the ISSA.
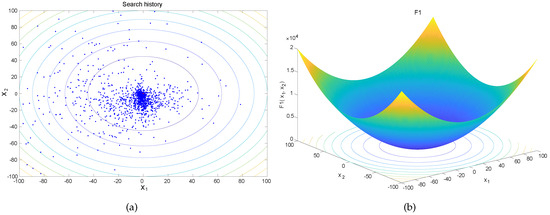
Figure 4.
(a) ISSA initial population diagram. The blue dots indicate the initial solution distribution, the red dot indicates the initial optimal solution, and the lines in the figure indicate the contour distribution of solutions. (b) The 3D and contour maps for 2D function.
3.3. Algorithm Experimentation and Analysis
The comparison and analysis of the ISSAs over other algorithms using a set of benchmarking functions (CEC2021 functions) [35] provides valuable insights into the performance and effectiveness of these algorithms. These benchmarking functions are widely used to evaluate the capabilities of various optimization algorithms. The experiment is unified using a Microsoft 64-bit operating system. The programming code and test code of the algorithm are implemented by MATLABR2016a software. The study selects a set of metaheuristic algorithms, such as SSA, PSO, whale optimization algorithm (WOA), grey wolf optimizer (GWO), multi-variable optimization (MVO) and golden jackal optimization (GJO). These algorithms are chosen based on their widespread use and success in various domains. Each algorithm for each test function performs 30 independent runs. The aim is to obtain more reliable results by reducing the effect of randomness. The maximum number of iterations is 500. If an algorithm reaches the maximum number of iterations without finding an optimal solution, it is considered not to have converged to the objective value.
All algorithms will use the parameters specified in their original papers. Benchmark functions will be evaluated over 30 independent runs, and the mean and standard deviation of the optimization results for each algorithm will be recorded. Table 2 shows the test results of the seven optimization algorithms for the standard functions in CEC2021. The optimal values of the ten test functions correspond to 0, 0, 0, 0, 0, 0, 0, 0, 0 and 0, respectively. Table 3 shows the test results of seven optimization algorithms for multi-dimensional composite functions in CEC2021. The optimal values of the ten test functions correspond to 100, 1100, 700, 1900, 1700, 1600, 2100, 2200, 2400, and 2500, respectively. The “Mean” column represents the average fitness value obtained by each algorithm over 30 runs, where values closer to the theoretical optimum indicate better performance. The “STD” column shows the standard deviation of the fitness values, reflecting the algorithm’s stability in finding the optimal solutions. The “Best” column represents the best value of each algorithm over 30 runs.
Table 2.
The mean, standard deviation, and optimal value of the CEC2021 standard function.
Table 3.
The mean, standard deviation, and optimal value of the CEC2021 multi-dimensional composite function.
The comparison of the ISSA with the standard SSA on the CEC2021 benchmarking functions, as presented in Table 2, indicates that the ISSA optimization accuracy for the F1 function is marginally lower than that of the SSA. However, the ISSA exhibits enhanced optimization accuracy across the remaining tested functions compared to the SSA. Notably, on complex multi-modal functions such as F2–F7, the ISSA significantly outperforms the SSA, demonstrating a superior capability to escape the local optima. The STD values of the ISSA are generally lower than those of the SSA, suggesting that the ISSA results are more stable and consistent. As evidenced by the mean values in Table 3, the ISSA achieves higher accuracy in identifying the optimal solutions for the CEC2021 multi-dimensional composite functions across all tested cases. This improvement is attributed to the effective acceleration of the convergence speed facilitated by the Levy flight strategy and nonlinear convergence factor. Overall, the ISSA demonstrates enhanced convergence speed and accuracy relative to the standard SSA.
Compared with other algorithms, Table 2 shows that the ISSA consistently achieves the lowest or near-lowest mean values across all test functions. This indicates that ISSA demonstrates robust performance across various problem types. For functions F1, F3, F5, F6, F7, F9, and F10, the ISSA obtains the lowest mean values among all algorithms, clearly outperforming others. For function F8, the ISSA reaches optimal values comparable to those of some other algorithms, such as MVO and GJO, suggesting its ability to consistently find the best solution for the problem. Table 3 further indicates that the ISSA also consistently achieves the lowest or near-lowest mean values across all test functions. Results for both standard and multi-dimensional composite functions show that the ISSA is competitive across all functions and demonstrates high optimization accuracy. The STD value confirms that the superiority of the proposed algorithm is relatively stable.
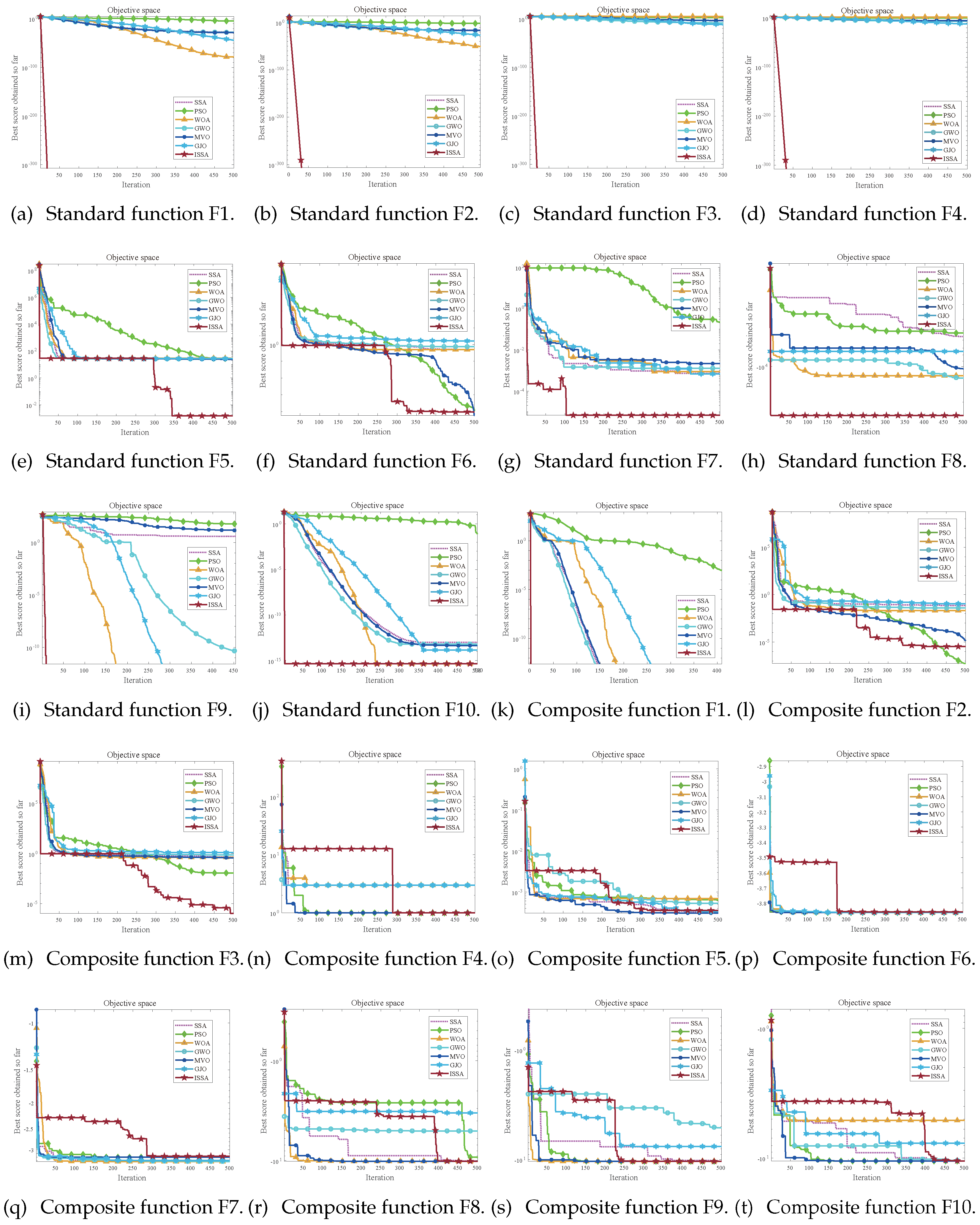
The computational results of the seven algorithms for the 10 test functions are shown in Figure 5. It can be seen from the figure that the ISSA has less error and more accurate results than the other six algorithms. The side shows that the ISSA has the optimal iteration results. It shows that the ISSA has good stability compared to other algorithms. From the convergence curves in Figure 5, it is evident that the ISSA exhibits continuous convergence across different test functions, with a convergence speed significantly faster than other methods. As shown in Figure 5e–g,m–t, once the ISSA fitness values reach a certain magnitude, its convergence speed markedly outperforms that of other algorithms. This indicates that the ISSA also demonstrates superior ability to escape from local optima.
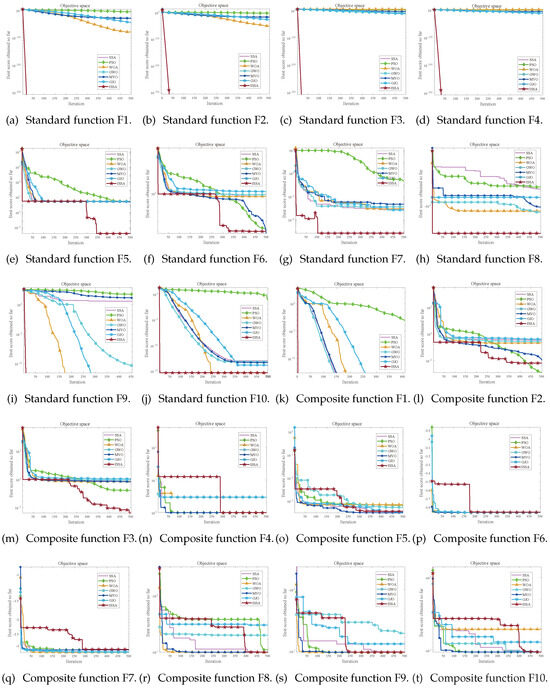
Figure 5.
Comparison of simulation convergence images of the ISSA in CEC2021.
Figure 5 and Table 2 and Table 3 show that the ISSA has a significant improvement in optimization accuracy compared to SSA and has extremely significant good optimization performance compard to six other algorithms in CEC2021. Furthermore, the ISSA has a stronger optimization ability and stability than the SSA for certain categories of problems, which indicates that the ISSA has further improved ability to solve certain types of problems.
4. Path Planning for AUV
The marine environment is intricate and subject to constant change, with the dynamics of marine organisms exhibiting a wide variety of characteristics, and the ocean currents are unpredictable due to the combined influence of many factors, all of which will increase the difficulty of underwater AUVs in detecting and sensing the marine environment. Obstacle avoidance of the AUV has a great impact on the execution of the mission, so it is of great significance to enhance the path planning technology of the AUV. The information fusion of the improved algorithm with AUV path planning can realize the accuracy, reliability, and resilience of the underwater AUV in navigating the target’s movement, and its own motion dynamics within the intricate marine environment is crucial.
4.1. Path Planning for AUV in 2D Environment
AUV 2D path planning is optimized by using the SSA and ISSA, whose results are investigated. The effectiveness of the proposed method is verified through experiments. A fitness function incorporating constraints is formulated as =, where m denotes the total number of nodes along the path. The term signifies the squared distance between consecutive nodes, effectively measuring the path’s length in a grid-like pattern. In this experiment, the path nodes are progressed sequentially to their subsequent positions. Ultimately, the path is ascertained based on the horizontal coordinates that delineate the trajectory.
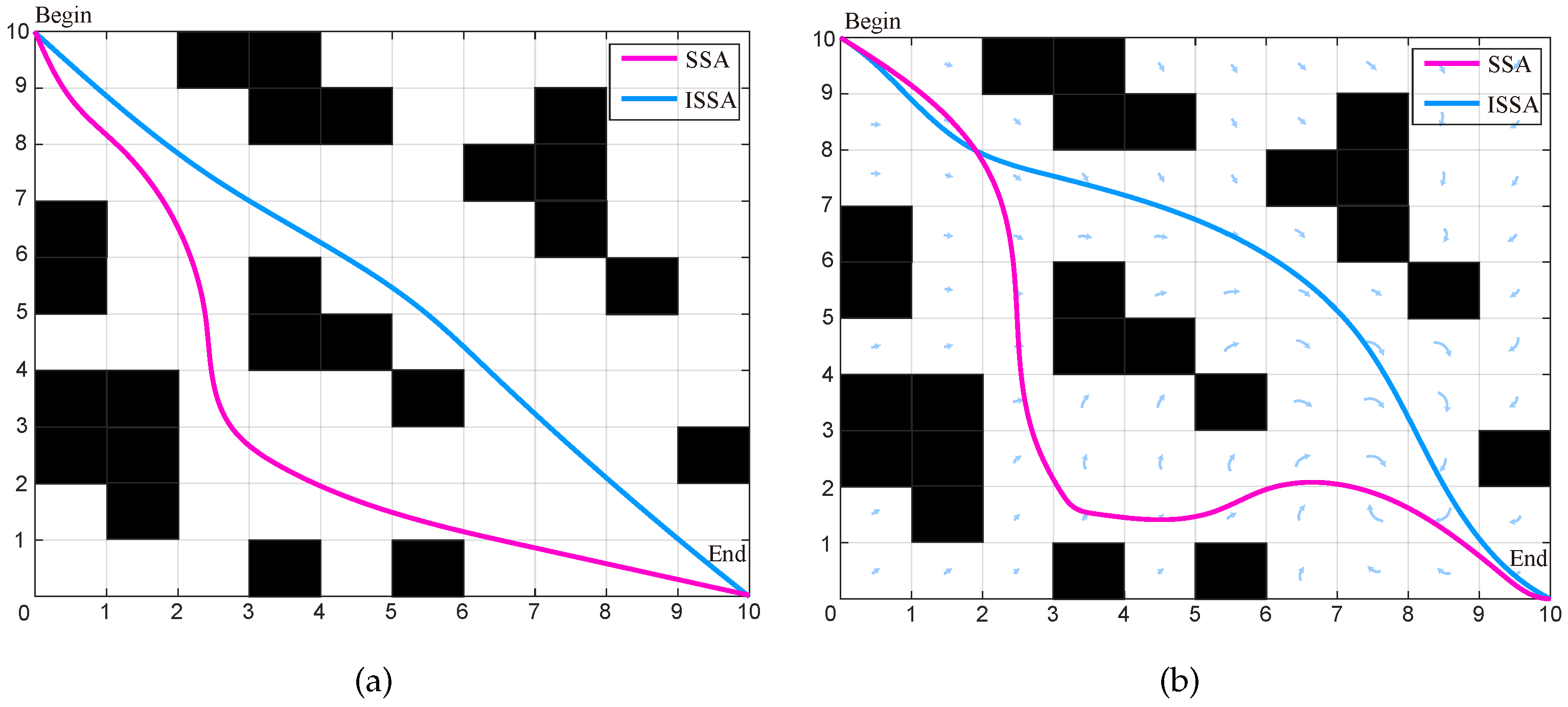
The grid map is used for constructing the simulation environment due to its simplicity and efficiency. This method involves dividing a two-dimensional plane into grids of equal length and width, each with a side length of one. In the encoding process, the value one represents obstacles, which are depicted as black areas in the environmental model, while zero represents unobstructed grids, shown as white areas. The grid environment for AUV path planning is illustrated in Figure 6, with the starting point coordinates at (0, 10) and the endpoint coordinates at (10, 0). The SSA and ISSA are used for 2D path planning of the AUV. The initial overall number is 50, and the maximum number of iterations is 500. Figure 6a represents the optimal paths of the two algorithms. It is clear to see that the path under the optimization of the ISSA is shorter. Figure 6b represents the 2D path planning of the AUV under the influence of vortices. Under the influence of eddy currents, the AUV path to the end point has a slight deviation, but the ISSA still shows a clear advantage. The iterative curves of AUV 2D path planning by the SSA and ISSA are shown in Figure 7. Table 4 shows the comparison results of the two algorithms for 2D path planning.
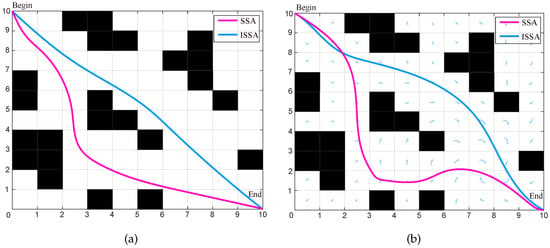
Figure 6.
The 2D path planning of AUVs by the SSA and ISSA. The blue line is the path planned by ISSA and the red line is the path planned by SSA. Arrows indicate the direction of currents. (a) No eddy. (b) Existence eddy.
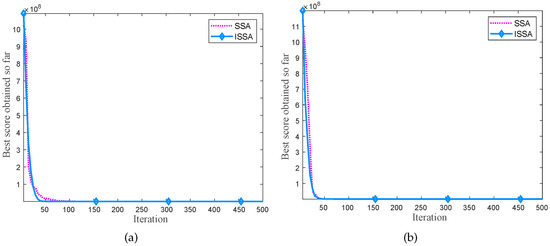
Figure 7.
Iteration curves of 2D path planning of AUVs by SSA and ISSA. (a) No eddy. (b) Existence eddy.
Table 4.
Comparison of experimental results of 2D AUV path planning based on two algorithms.
As presented in Table 4, the ISSA outperforms the SSA on several metrics under varying environmental conditions. In the “No Eddy” scenario, the ISSA registers a 102.38% reduction in the number of iterations required (42 vs. 85), a 43.75% reduction in the average path length (32 vs. 46), and a 45.05% decrease in computational time (1.022 s vs. 1.86 s). Additionally, the ISSA demonstrates markedly improved consistency with a 56.01% reduction in the standard deviation of results (0.99556 vs. 2.2631). In the “Existence Eddy” environment, although the gap in iterations narrows with the ISSA showing a modest 4.55% improvement (42 vs. 44), it maintains a significant 50.66% increase in computational efficiency (1.317 s vs. 2.669 s). Crucially, the ISSA achieves a 26.32% decrease in the mean path length (56 vs. 76) relative to the SSA, indicating superior efficacy in navigating to shorter paths. The ISSA also shows considerably enhanced consistency, evidenced by a 63.30% reduction in the standard deviation of results (1.3333 vs. 3.6327). This lower standard deviation suggests that the ISSA outcomes are more reliable and consistent than those of SSA, particularly in complex scenarios. Collectively, these results underscore the comprehensive improvements of the ISSA in efficiency, path length optimization, and consistency across both tested environments, with especially significant enhancements in computational speed and result stability.
4.2. Path Planning for AUVs in 3D Environment
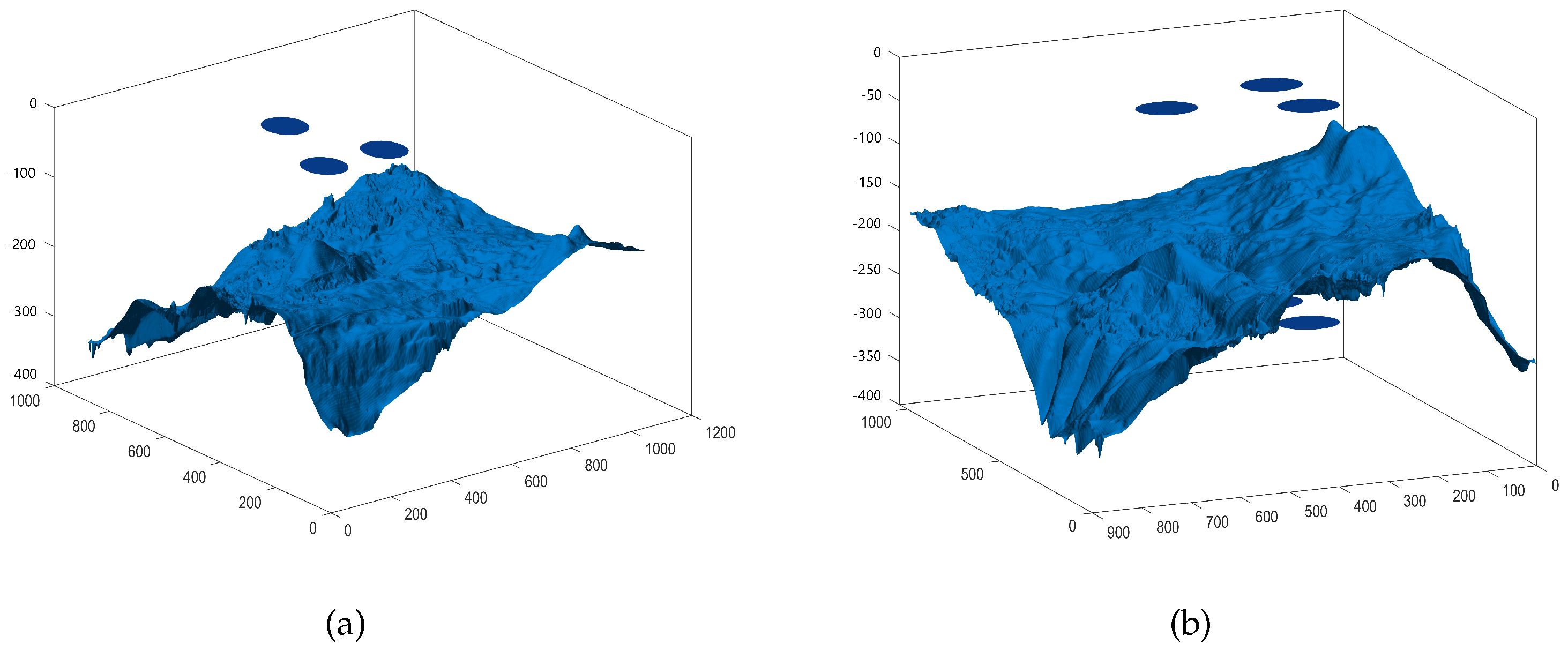
The marine environment is distinguished by its unique features and inherent complexity, predominantly reflected in the shifting nature of maritime weather conditions and the flow of seawater. Additionally, the environment is marked by the intense pressure and frigid temperatures present at great ocean depths, as well as the aggressive corrosiveness of seawater. In addition, there are some unobservable and complex environments in the marine environment, such as reefs and undercurrents. At the same time, some mesoscale and submesoscale eddies are also an important part of the complex environment of the marine environment. The complex marine environment is constructed as shown in Figure 8, which includes marine sediments, reefs, and eddies.
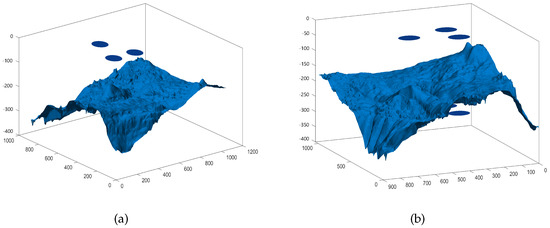
Figure 8.
The 3D underwater map in different views (a,b).
AUVs face great risks when performing observation and detection missions in complex unsteady environments. In the complex nonstationary environment, the AUV is very susceptible to the influence of eddy currents and deviation from the predetermined route when searching for the target, but the detection mission requires the AUV to move along the target direction and along the predetermined trajectory at all times until it reaches the target point for sampling. Accurate path planning for an AUV in intricate and changing environments is essential for ensuring the successful execution of its mission objectives. High-precision path planning technology requires high stability and robustness of the path planning algorithm.
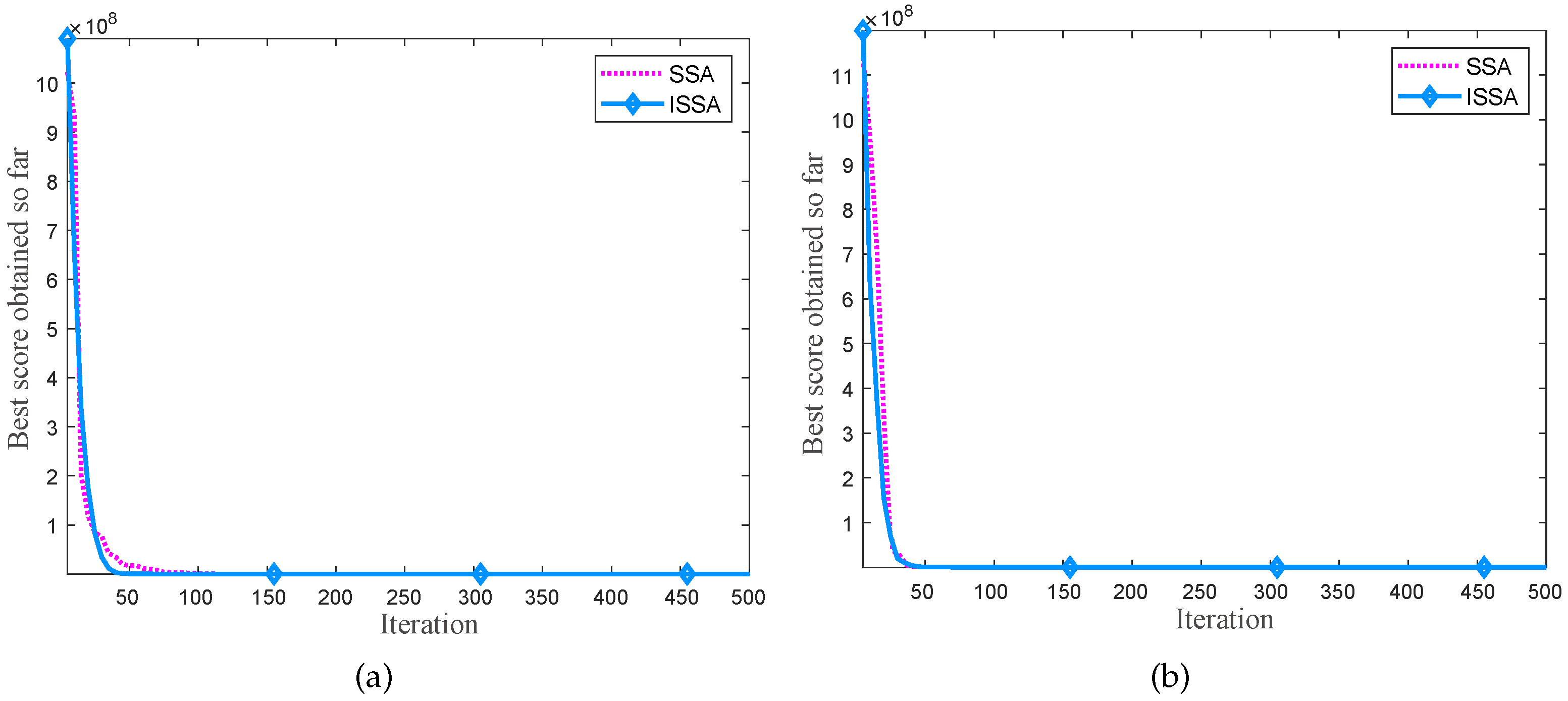
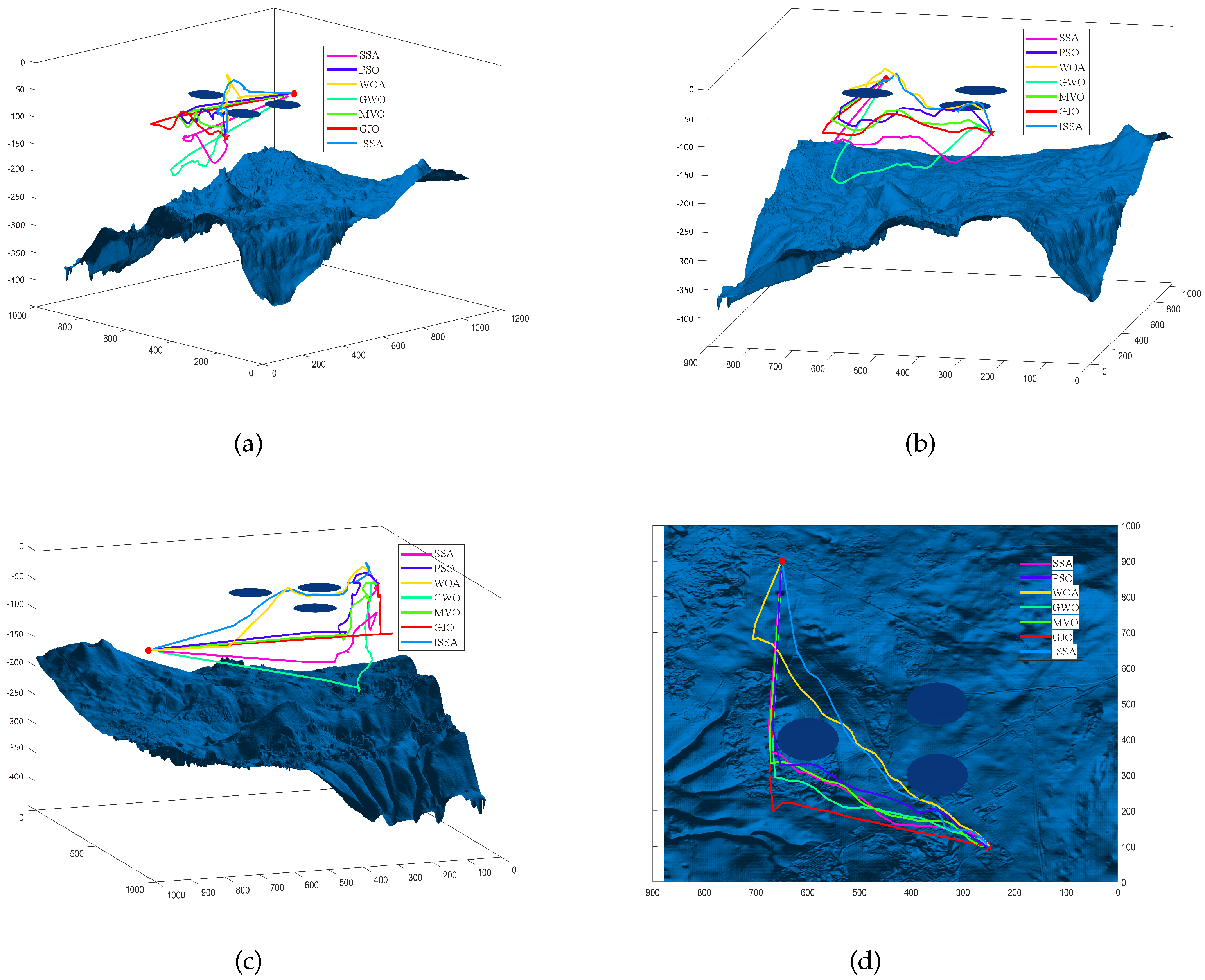
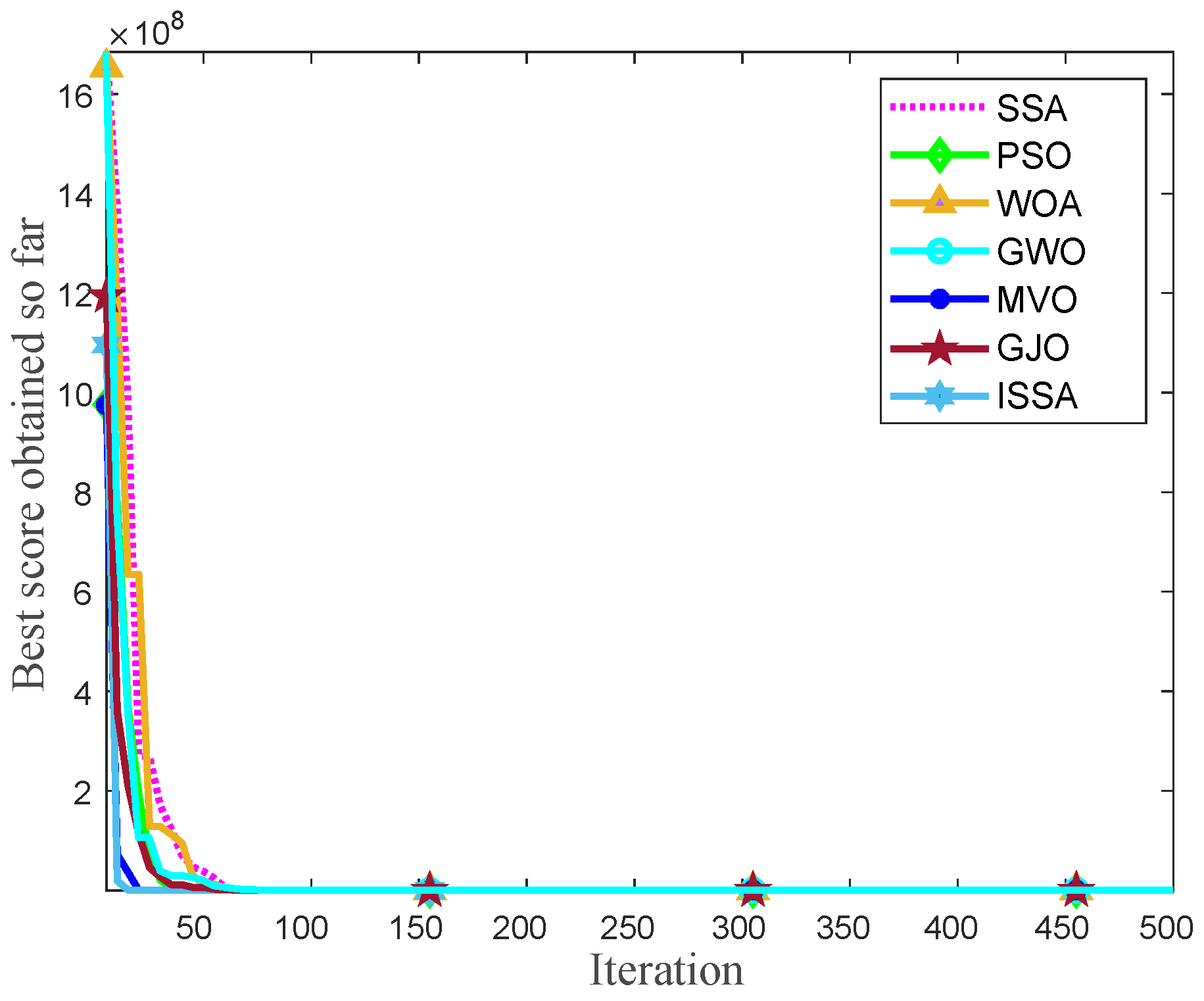
Regarding setting up the starting point and end point in a complex marine environment, in the 3D path planning simulation, the starting point (denoted by a star) is at coordinates (100, 250, −100), and the endpoint (denoted by a circle) is at coordinates (900, 650, −150). The coordinates of the three obstacles are respectively (300, 350, −100), (400, 600, −100), and (500, 350, −100). Each grid cell in the map is set to a size of 40 × 40 m. Through combining the AUV dynamics model with the intelligent algorithms (ISSA, PSO, WOA, GWO, MVO, GJO, and SSA), the motion trajectories of AUVs under seven intelligent algorithms are obtained as shown in Figure 9. The iteration curves of 3D path planning for AUV by ISSA, PSO, WOA, GWO, MVO, GJO, and SSAare shown in Figure 10.
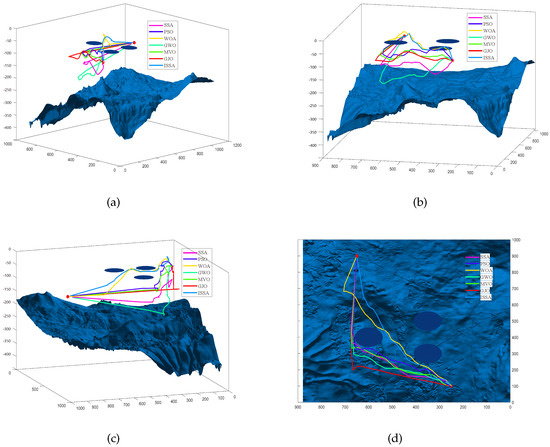
Figure 9.
The 3D path planning for AUV by SSA, PSO, WOA, GWO, MVO, GJO, and ISSA. (a–c) A 3D view. (d) A 2D top view.
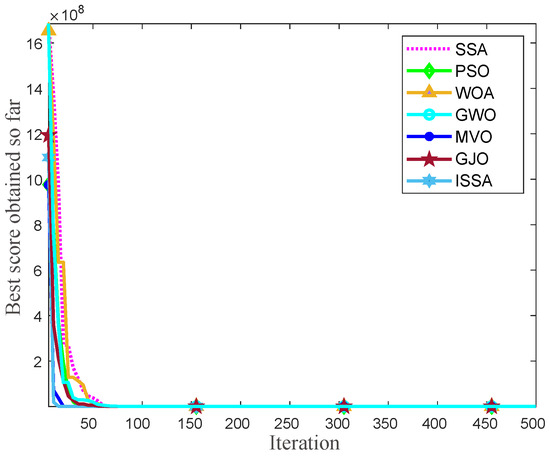
Figure 10.
Iteration curves of 3D path planning for AUV by SSA, PSO, WOA, GWO, MVO, GJO, and ISSA.
Table 5 shows the comparison results of the seven algorithms for 3D path planning. Different intelligent algorithms have different effects on AUV path planning in complex marine environments. In order to verify the effectiveness of the proposed AUV 3D path planning method based on the improved SSA, the path planning under the influence of eddy currents and obstructions is discussed with seven algorithms. As shown in Table 5, ISSA consistently outperforms the others across all metrics. It requires the fewest iterations, which is 19. The mean grid path length of the ISSA is the lowest at 32, achieving reductions from 21.88% against GWO to 312.50% against WOA. It also shows the greatest consistency, with a standard deviation of 0.996. ISSA records the best performance at 30, significantly better than competitors, with improvements ranging from 20.00% against GWO to 316.67% against WOA. Moreover, in terms of computational time, ISSA is the quickest at 2.346 s. The comparison shows that the trajectory of the AUV path planning with the improved SSA is more stable and smooth. Furthermore, the ISSA proposed in this paper has the shortest computational time consumption, which is 2.346 s in a 3D scene, and can support real-time AUV path planning in real-world scenarios with regular motion state.
Table 5.
Comparison of experimental results of 3D AUV path planning based on seven algorithms.
5. Conclusions
In this paper, we investigate the problem of 3D path planning for AUV based on the ISSA. The motion model of the AUV is constructed under the consideration of eddy current influence. The improved salp swarm algorithm is proposed. On the basis of the salp swarm algorithm, the Levy flight strategy and nonlinear convergence factor are added to expand the range of the leader position, which in turn expands the search range of the algorithm. The algorithm is capable of swiftly converging upon the optimal solution. The ISSA is applied to AUV 2D path planning and 3D path planning, which realizes the flexible obstacle avoidance of the AUV. Compared with the other six intelligent algorithms, the ISSA is relatively more stable. Even in the complex marine environment, a route with short distance and high safety can be planned quickly.
In future work, the ISSA-based 3D path planning under the influence of dynamic obstacles will be considered, and the ISSA can be better applied to the problems of path planning tracking and detecting complex ocean information in AUVs. Additionally, we plan to validate and optimize in real ocean environments, while also taking into account path planning considering AUV energy loss.
Author Contributions
Conceptualization, X.G.; methodology, Y.L. and D.Z.; software, T.F.; validation, F.L. and D.Z.; investigation, Y.L. and X.G.; resources, Y.L.; data curation, C.F. and F.L.; writing—original draft, X.G.; writing—review and editing, Y.L. and T.F.; visualization, X.G.; supervision, D.Z.; project administration, D.Z. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by National Natural Science Foundation of China (Grant No. 52361045) and China Postdoctoral Science Foundation (Grant No. 2024M752505).
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
The raw data supporting the conclusions of this article will be made available by the authors on request.
Acknowledgments
We would like to acknowledge the support of the Natural Science Foundation of China (Grant No. 52361045) and the China Postdoctoral Science Foundation (Grant No. 2024M752505).
Conflicts of Interest
The authors declare no conflicts of interest.
Abbreviations
The following abbreviations are used in this manuscript:
| AUV | Autonomous Underwater Vehicle |
| ISSA | Improved Salp Swarm Algorithm |
| SSA | Schönhage–Strassen Algorithm |
| POS | Particle Swarm Optimization |
| WOA | Whale Optimization Algorithm |
| GWO | Grey Wolf Optimizer |
| GJO | Golden Jackal Optimization |
| MVO | Multi-variable Optimization |
| STD | Standard Deviation |
References
- Zhang, B.; Ji, D.; Liu, S.; Zhu, X.; Xu, W. Autonomous Underwater Vehicle navigation: A review. Ocean Eng. 2023, 273, 113861. [Google Scholar] [CrossRef]
- Yang, Y.; Xiao, Y.; Li, T. A Survey of Autonomous Underwater Vehicle Formation: Performance, Formation Control, and Communication Capability. IEEE Commun. Surv. Tutor. 2021, 23, 815–841. [Google Scholar]
- Ahmed, F.; Xiang, X.; Jiang, C.; Xiang, G.; Yang, S. Survey on traditional and AI based estimation techniques for hydrodynamic coefficients of autonomous underwater vehicle. Ocean Eng. 2023, 268, 113300. [Google Scholar]
- Panda, J.P.; Mitra, A.; Warrior, H.V. A review on the hydrodynamic characteristics of autonomous underwater vehicles. Proc. Inst. Mech. Eng. Part M J. Eng. Marit. Environ. 2021, 235, 15–29. [Google Scholar]
- Zhou, H.; Cao, J.; Fu, J.; Liu, C.; Wei, Z.; Yu, C.; Zeng, Z.; Yao, B.; Lian, L. Dynamic modeling and motion control of a novel conceptual multimodal underwater vehicle for autonomous sampling. Ocean Eng. 2021, 240, 109917. [Google Scholar]
- Rath, B.N.; Subudhi, B. A robust model predictive path following controller for an Autonomous Underwater Vehicle. Ocean Eng. 2022, 244, 110265. [Google Scholar]
- Deng, F.; Levi, C.; Yin, H.; Duan, M. Identification of an Autonomous Underwater Vehicle hydrodynamic model using three Kalman filters. Ocean Eng. 2021, 229, 108962. [Google Scholar]
- Munoz, F.; Cervantes-Rojas, J.S.; Valdovinos, J.M.; Sandre-Hernandez, O.; Salazar, S.; Romero, H. Dynamic Neural Network-Based Adaptive Tracking Control for an Autonomous Underwater Vehicle Subject to Modeling and Parametric Uncertainties. Appl. Sci. 2021, 11, 2797. [Google Scholar] [CrossRef]
- Petres, C.; Pailhas, Y.; Patron, P.; Petillot, Y.; Evans, J.; Lane, D. Path Planning for Autonomous Underwater Vehicles. IEEE Trans. Robot. 2007, 23, 331–341. [Google Scholar]
- Zhang, J.; Wang, Z.; Han, G.; Qian, Y.; Li, Z. A Collaborative Path Planning Method for Heterogeneous Autonomous Marine Vehicles. IEEE Internet Things J. 2024, 11, 1465–1480. [Google Scholar] [CrossRef]
- Zeng, Z.; Xiong, C.; Yuan, X.; Zhou, H.; Bai, Y.; Jin, Y.; Lu, D.; Lian, L. Information-Driven Path Planning for Hybrid Aerial Underwater Vehicles. IEEE J. Ocean. Eng. 2023, 48, 689–715. [Google Scholar] [CrossRef]
- Yu, L.; Qiao, L.; Shen, C. High-Speed Obstacle Avoidance of a Large-Scale Underactuated Autonomous Underwater Vehicle Under a Finite Field of View. IEEE Trans. Autom. Sci. Eng. 2024, 1–10. [Google Scholar] [CrossRef]
- Er, M.J.; Gong, H.; Liu, Y.; Liu, T. Intelligent Trajectory Tracking and Formation Control of Underactuated Autonomous Underwater Vehicles: A Critical Review. IEEE Trans. Syst. Man Cybern. Syst. 2024, 54, 543–555. [Google Scholar] [CrossRef]
- He, J.; Wen, J.; Yan, L.; Xi, M.; Xiao, S.; Chen, D.; Yang, J. An On-Board Control Scheme for Consumer-Level Autonomous Underwater Vehicle in the Intelligent Cyber–Physical Transportation Systems. IEEE Trans. Consum. Electron. 2024, 70, 4556–4563. [Google Scholar] [CrossRef]
- Li, D.; Wang, P.; Du, L. Path Planning Technologies for Autonomous Underwater Vehicles-A Review. IEEE Access 2019, 7, 9745–9768. [Google Scholar] [CrossRef]
- Panda, M.; Das, B.; Subudhi, B.; Pati, B.B. A Comprehensive Review of Path Planning Algorithms for Autonomous Underwater Vehicles. Int. J. Autom. Comput. 2020, 17, 321–352. [Google Scholar]
- Wang, Z.; Li, Y.; Ma, C.; Yan, X.; Jiang, D. Path-following optimal control of autonomous underwater vehicle based on deep reinforcement learning. Ocean Eng. 2023, 268, 113407. [Google Scholar]
- Zhang, W.; Wang, N.; Wu, W. A hybrid path planning algorithm considering AUV dynamic constraints based on improved A* algorithm and APF algorithm. Ocean Eng. 2023, 285, 115333. [Google Scholar] [CrossRef]
- Zhang, X.; Hao, X.; Zhang, L.; Liu, L.; Zhang, S.; Ren, R. Multi-Autonomous Underwater Vehicle Full-Coverage Path-Planning Algorithm Based on Intuitive Fuzzy Decision-Making. J. Mar. Sci. Eng. 2024, 12, 1276. [Google Scholar] [CrossRef]
- Sui, F.; Tang, X.; Dong, Z.; Gan, X.; Luo, P.; Sun, J. ACO+PSO+A*: A bi-layer hybrid algorithm for multi-task path planning of an AUV. Comput. Ind. Eng. 2023, 175, 108905. [Google Scholar] [CrossRef]
- Liu, X.F.; Fang, Y.; Zhan, Z.H.; Jiang, Y.L.; Zhang, J. A Cooperative Evolutionary Computation Algorithm for Dynamic Multiobjective Multi-AUV Path Planning. IEEE Trans. Ind. Inform. 2024, 20, 669–680. [Google Scholar] [CrossRef]
- Okereke, C.E.; Mohamad, M.M.; Wahab, N.H.A.; Elijah, O.; Al-Nahari, A.; Zaleha, H.S. An Overview of Machine Learning Techniques in Local Path Planning for Autonomous Underwater Vehicles. IEEE Access 2023, 11, 24894–24907. [Google Scholar] [CrossRef]
- Gong, Y.J.; Huang, T.; Ma, Y.N.; Jeon, S.W.; Zhang, J. MTrajPlanner: A Multiple-Trajectory Planning Algorithm for Autonomous Underwater Vehicles. IEEE Trans. Intell. Transp. Syst. 2023, 24, 3714–3727. [Google Scholar] [CrossRef]
- Zhang, J.; Chen, D.; Han, G.; Qian, Y. Formation Path Planning for Collaborative Autonomous Underwater Vehicles Based on Consensus-Sparrow Search Algorithm. IEEE Internet Things J. 2024, 11, 13810–13823. [Google Scholar] [CrossRef]
- Hadi, B.; Khosravi, A.; Sarhadi, P. Adaptive Formation Motion Planning and Control of Autonomous Underwater Vehicles Using Deep Reinforcement Learning. IEEE J. Ocean. Eng. 2024, 49, 311–328. [Google Scholar] [CrossRef]
- Chu, Z.; Wang, Y.; Zhu, D. Local 2-D Path Planning of Unmanned Underwater Vehicles in Continuous Action Space Based on the Twin-Delayed Deep Deterministic Policy Gradient. IEEE Trans. Syst. Man Cybern. Syst. 2024, 54, 2775–2785. [Google Scholar] [CrossRef]
- Cai, W.; Zhang, S.; Zhang, M.; Wang, C. Improved BINN-Based Underwater Topography Scanning Coverage Path Planning for AUV in Internet of Underwater Things. IEEE Internet Things J. 2023, 10, 18375–18386. [Google Scholar] [CrossRef]
- Sun, S.; Guo, H.; Wan, G.; Dong, C.; Zheng, C.; Wang, Y. High-Precision Underwater Acoustic Localization of the Black Box Utilizing an Autonomous Underwater Vehicle Based on the Improved Artificial Potential Field. IEEE Trans. Geosci. Remote Sens. 2023, 61, 4202510. [Google Scholar] [CrossRef]
- Xi, M.; Yang, J.; Wen, J.; Li, Z.; Lu, W.; Gao, X. An Information-Assisted Deep Reinforcement Learning Path Planning Scheme for Dynamic and Unknown Underwater Environment. IEEE Trans. Neural Netw. Learn. Syst. 2023, 1–12. [Google Scholar] [CrossRef]
- Yu, Y.; Zheng, H.; Xu, W. Learning and Sampling-Based Informative Path Planning for AUVs in Ocean Current Fields. IEEE Trans. Syst. Man Cybern. Syst. 2024, 1–12. [Google Scholar] [CrossRef]
- Zhang, J.; Liu, M.; Zhang, S.; Zheng, R.; Dong, S. A Path Planning Approach for Multi-AUV Systems With Concurrent Stationary Node Access and Adaptive Sampling. IEEE Robot. Autom. Lett. 2024, 9, 2343–2350. [Google Scholar] [CrossRef]
- Arifi, A.; Lepagnot, J.; Bouallègue, S.; Jourdan, L. 3D Path Planning of Autonomous Underwater Vehicles Using a Rapidly-exploring Random Trees Algorithm. In Proceedings of the 2023 IEEE International Conference on Artificial Intelligence and Green Energy (ICAIGE), Sousse, Tunisia, 12–14 October 2023; pp. 1–6. [Google Scholar] [CrossRef]
- Zhao, Y.; Hu, Z.; Du, W.; Geng, L.; Yang, Y. Research on Modeling Method of Autonomous Underwater Vehicle Based on a Physics-Informed Neural Network. J. Mar. Sci. Eng. 2024, 12, 801. [Google Scholar] [CrossRef]
- Mirjalili, S.; Gandomi, A.H.; Mirjalili, S.Z.; Saremi, S.; Faris, H.; Mirjalili, S.M. Salp Swarm Algorithm: A bio-inspired optimizer for engineering design problems. Adv. Eng. Softw. 2017, 114, 163–191. [Google Scholar] [CrossRef]
- Joshi, M.; Kalita, K.; Jangir, P.; Ahmadianfar, I.; Chakraborty, S. A conceptual comparison of dragonfly algorithm variants for CEC-2021 global optimization problems. Arab. J. Sci. Eng. 2023, 48, 1563–1593. [Google Scholar]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).