
Novel 3D Structural-Light Scanner Technique for Continuous Monitoring of Pier Scour in Laboratory




Abstract
1. Introduction
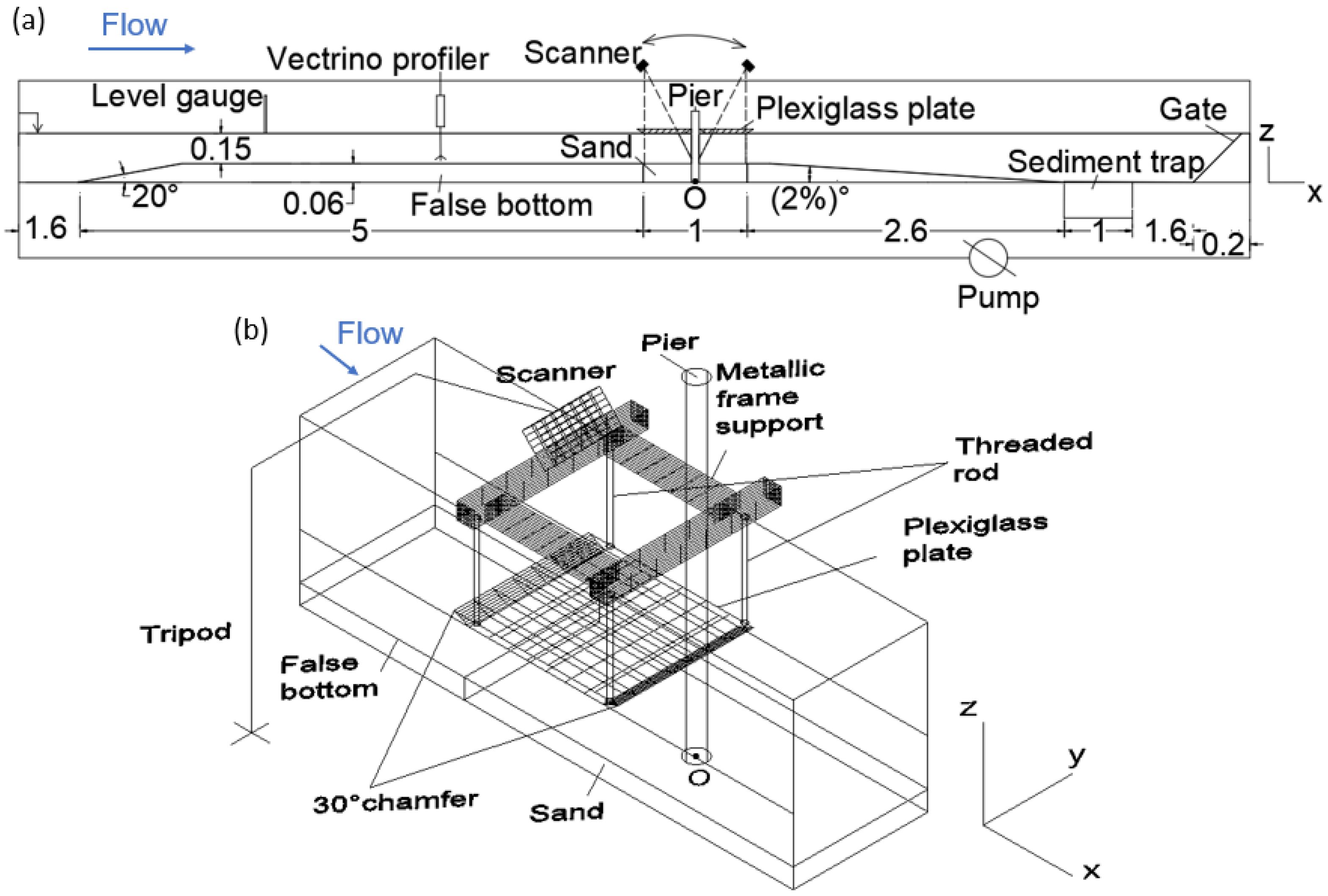
2. Flume Setup and Implementation of 3D Scanner Technique
3. Experimental Conditions
3.1. Sand Properties
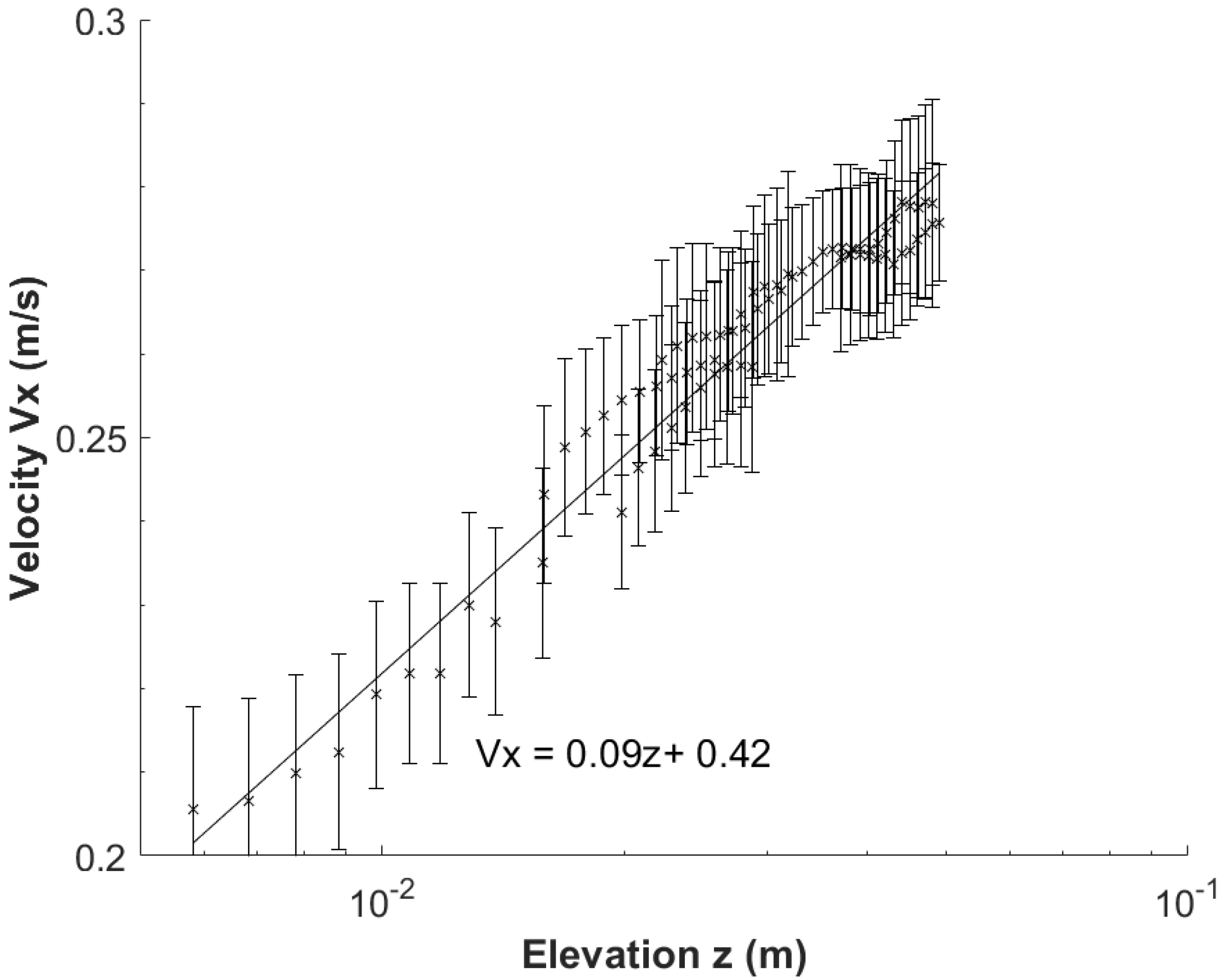
3.2. Flow Condition
4. Framework for Data Treatment
4.1. Data Acquisition
4.2. Calibration
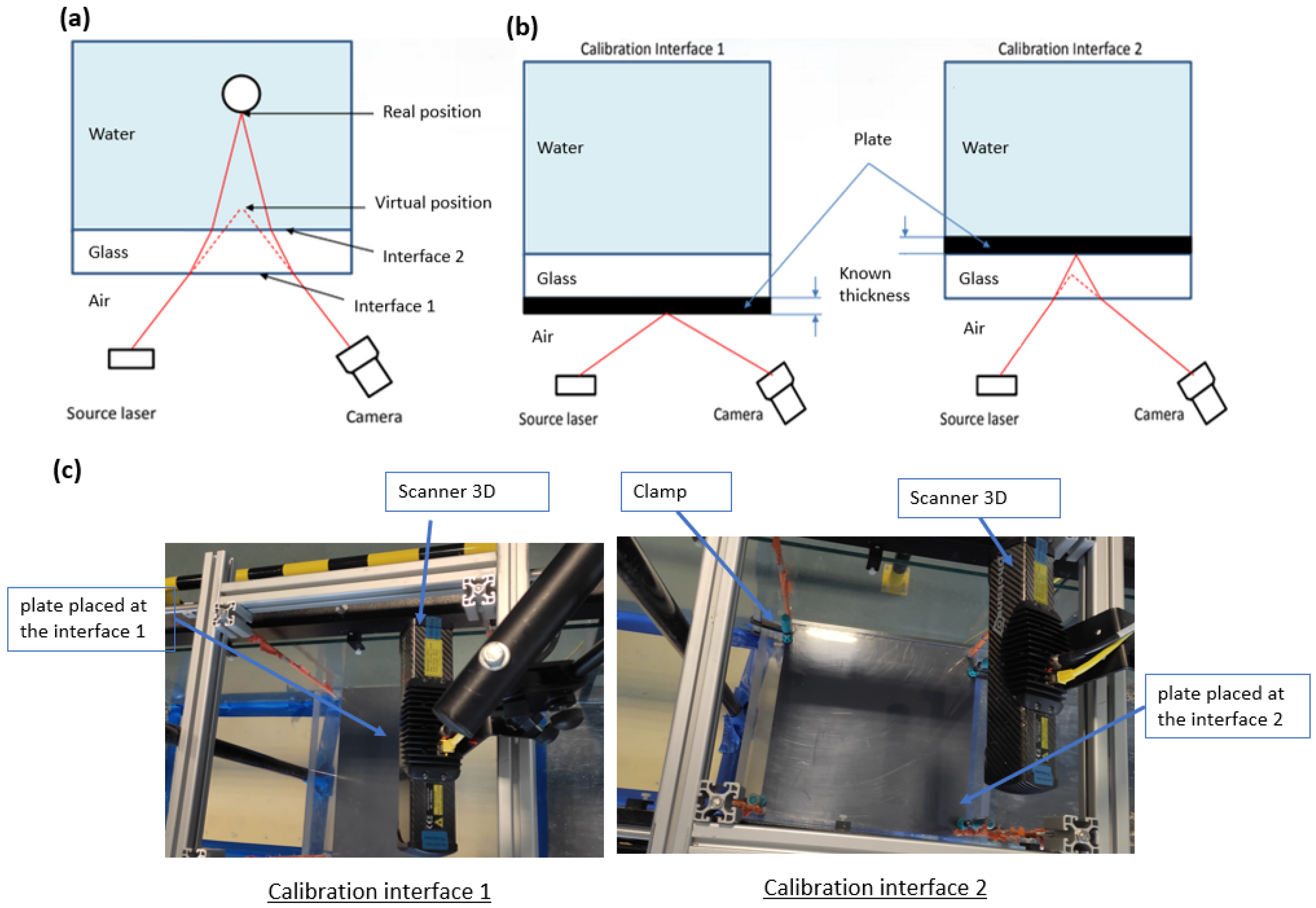
4.2.1. Refraction Correction
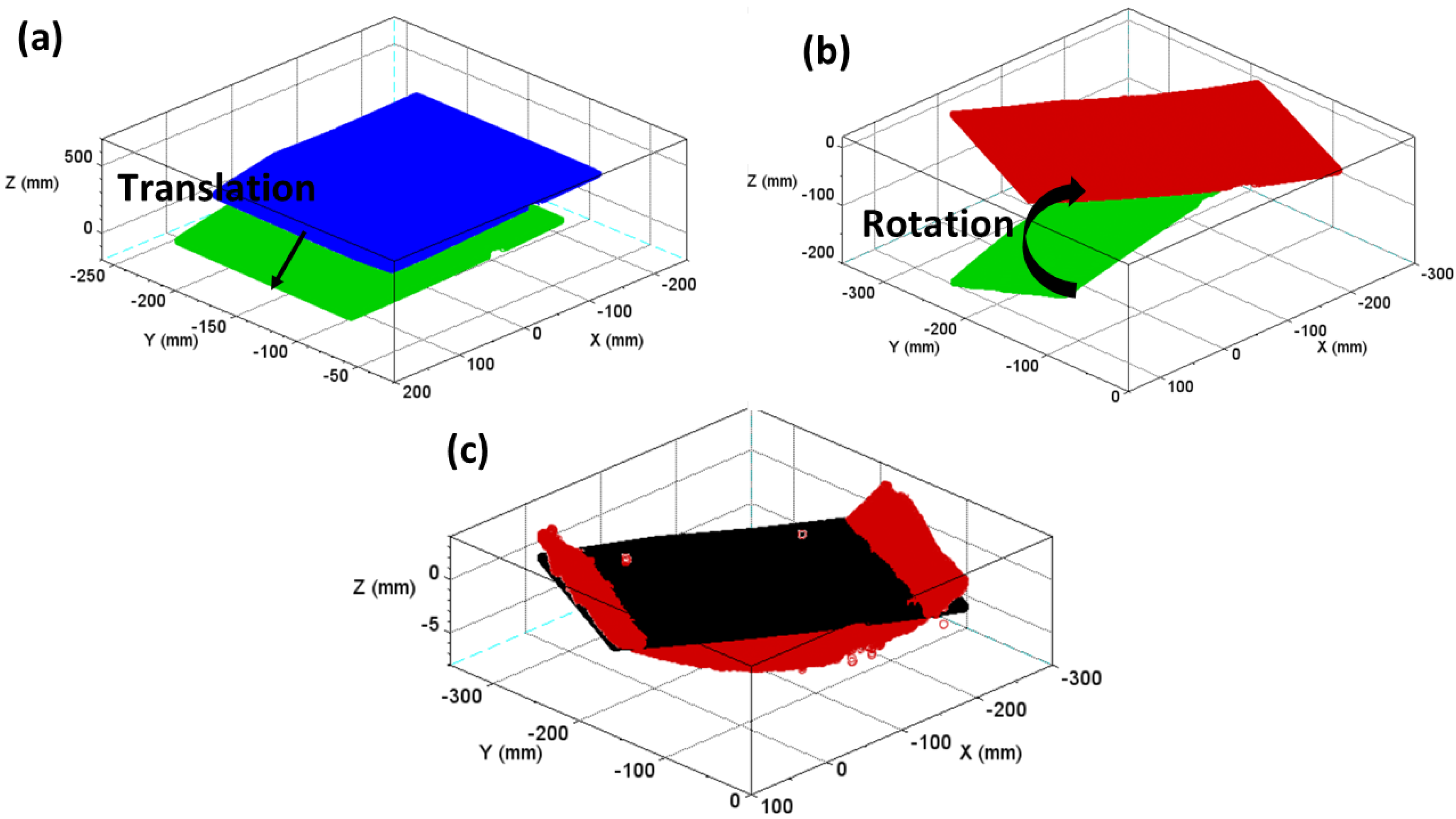
4.2.2. Reference Change
4.3. Post-Treatment
4.3.1. Cloud Cleaning
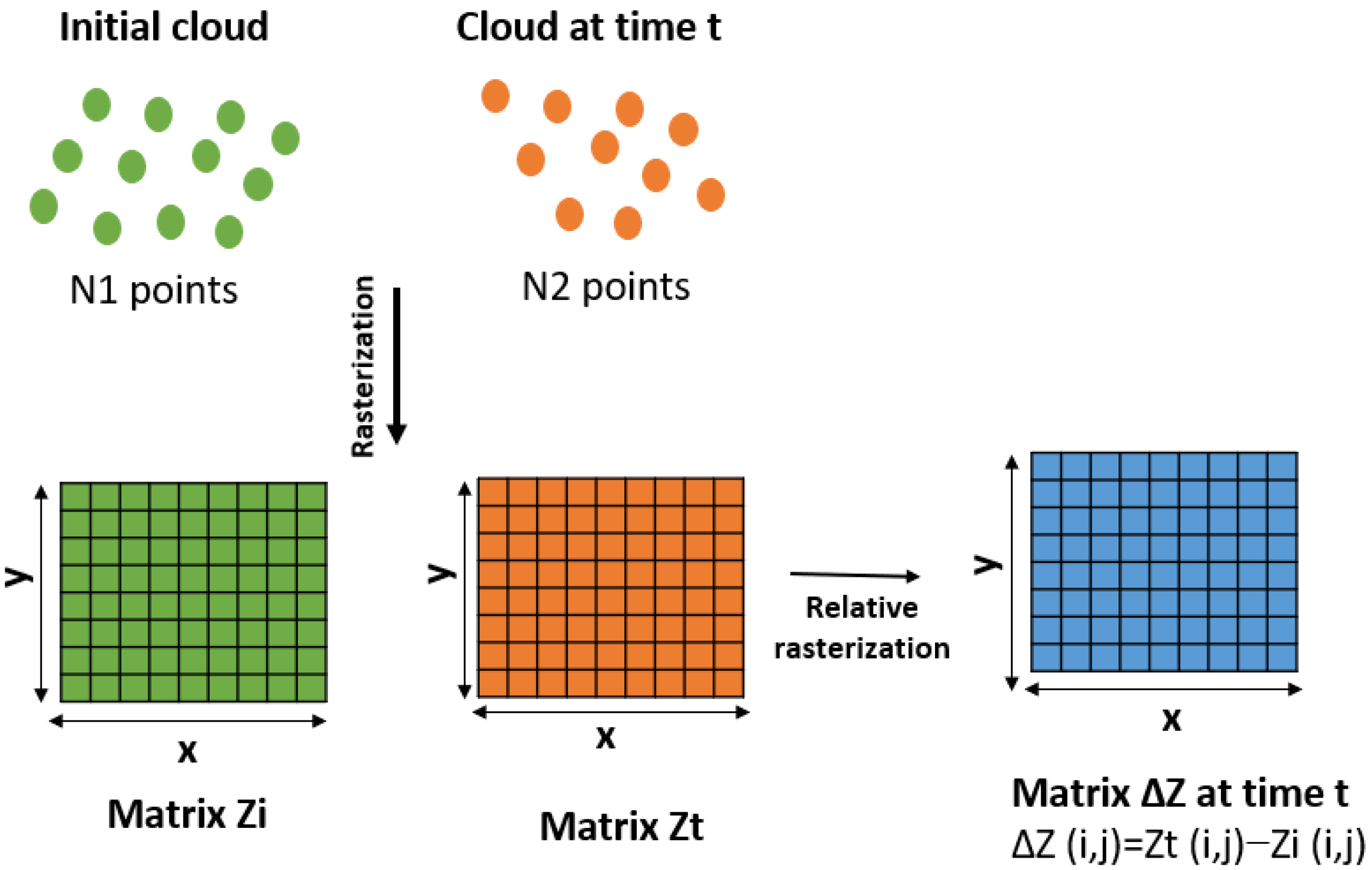
4.3.2. Relative Rasterization
- The number of points among the different clouds exhibits variations.
- The point density within a single scan is non-uniform, decreasing as the distance from the scanner increases.
- The scan of a flat plate reveals a vertical deviation from a perfectly flat plane.
4.4. Representation
5. Results
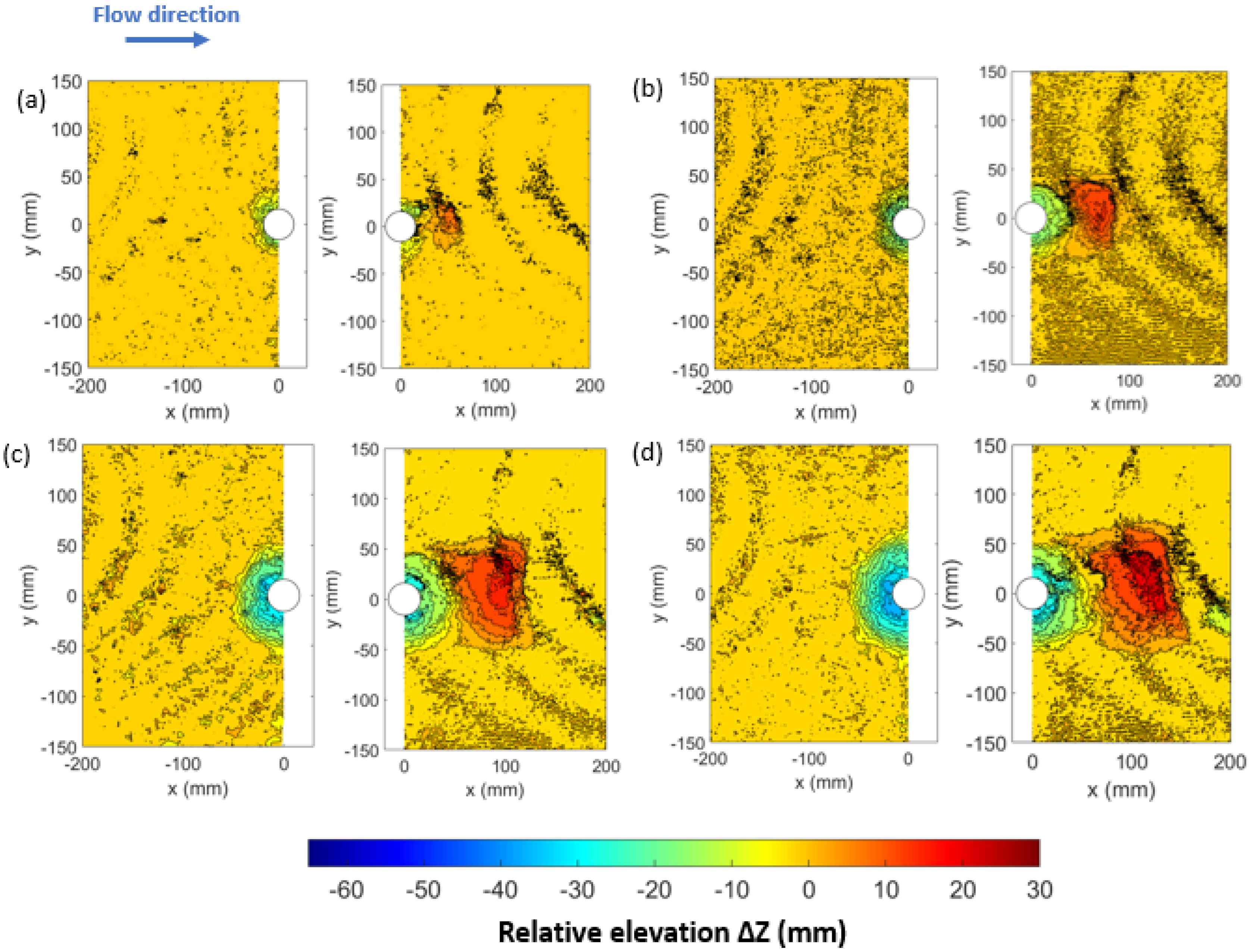
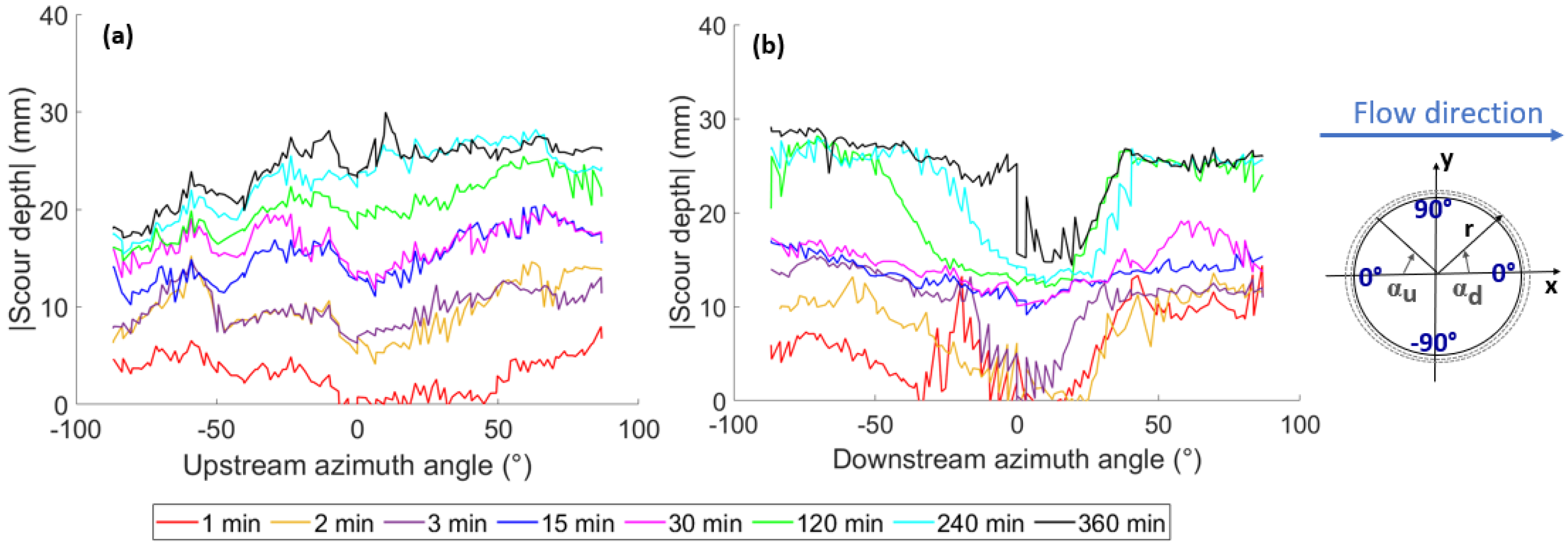
5.1. Spatio-Temporal Progression of the Scouring Phenomenon
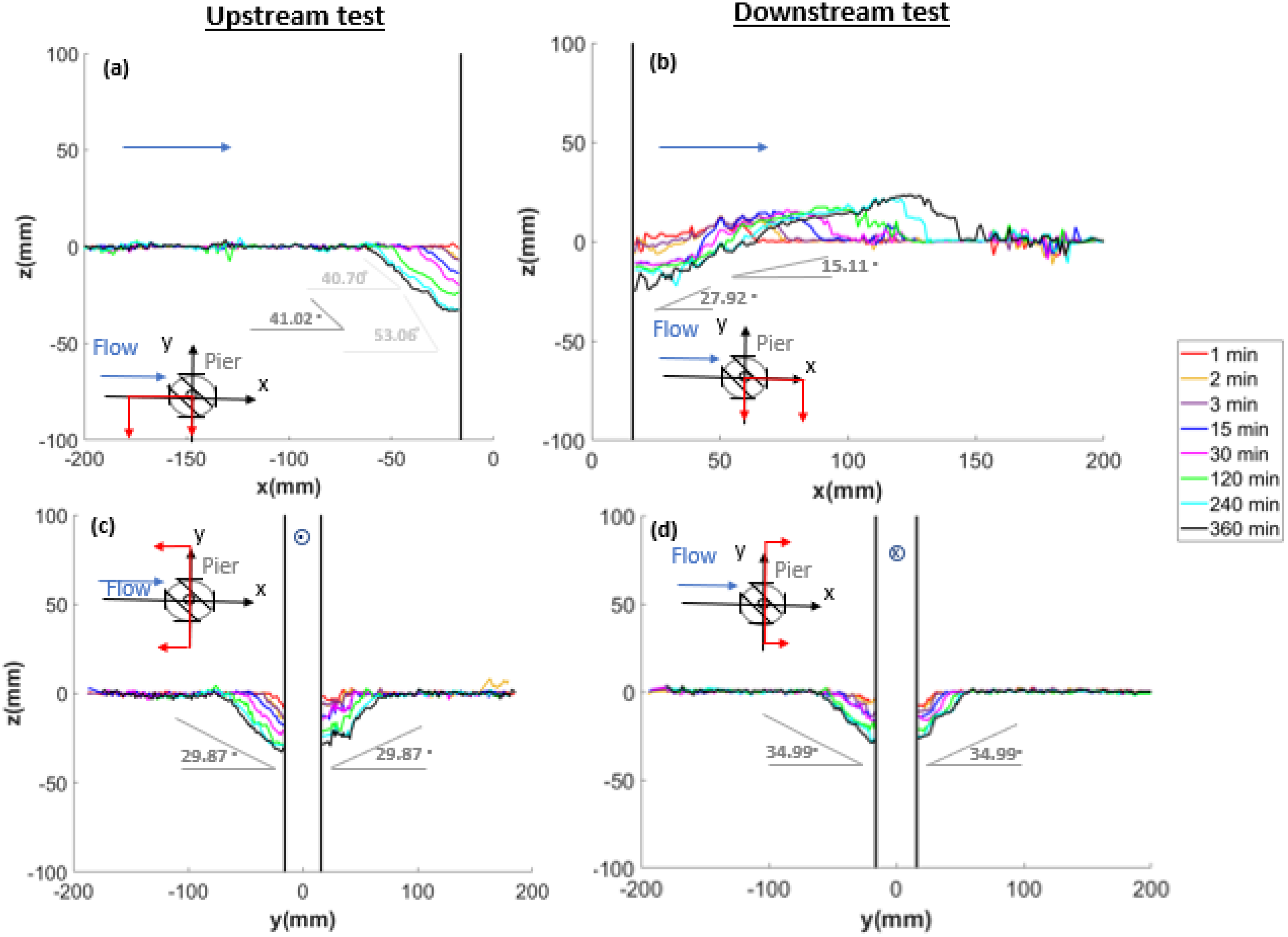
5.2. Temporal Evolution of the Scour Hole Profiles
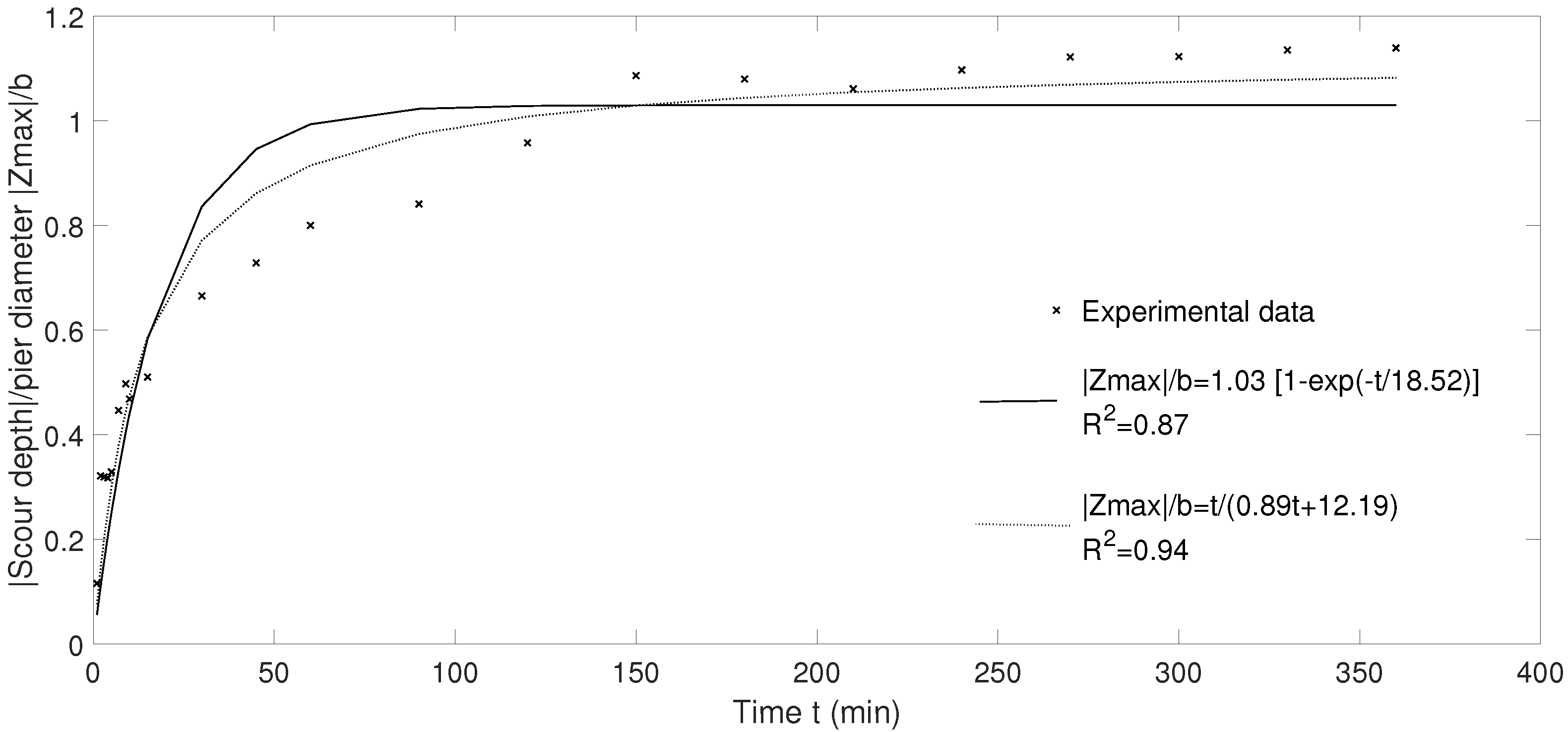
5.3. Temporal Variation of Maximum Scour Depth
5.4. Repeatability of the Tests
5.5. Effect of Plexiglass Plate on Pier Scour Topography
6. Discussion
7. Conclusions and Perspectives
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Melville, B.W.; Coleman, S.E. Bridge Scour; Water Resources Publication: Highlands Ranch, CO, USA, 2000. [Google Scholar]
- Kirby, A.; Roca, M.; Kitchen, A.; Escarameia, M.; Chesterton, O. Manual on Scour at Bridges and Other Hydraulic Structures; Ciria: London, UK, 2015. [Google Scholar]
- Oliveto, G.; Hager, W.H. Temporal evolution of clear-water pier and abutment scour. J. Hydraul. Eng. 2002, 128, 811–820. [Google Scholar] [CrossRef]
- Lança, R.M.; Fael, C.S.; Maia, R.J.; Pêgo, J.P.; Cardoso, A.H. Clear-water scour at comparatively large cylindrical piers. J. Hydraul. Eng. 2013, 139, 1117–1125. [Google Scholar] [CrossRef]
- Yanmaz, A.M.; Altinbilek, H.D. Study of time-depenbent local scour around bridge piers. J. Hydraul. Eng. 1991, 117, 1247–1268. [Google Scholar] [CrossRef]
- Porter, K.; Simons, R.; Harris, J. Comparison of three techniques for scour depth measurement: Photogrammetry, echosounder profiling and a calibrated pile. In Proceedings of the 34th International Conference on Coastal Engineering (ICCE 2014), Seoul, Republic of Korea, 15–20 June 2014; p. 64. [Google Scholar]
- Mia, M.F.; Nago, H. Design method of time-dependent local scour at circular bridge pier. J. Hydraul. Eng. 2003, 129, 420–427. [Google Scholar] [CrossRef]
- Debnath, K.; Chaudhuri, S. Bridge pier scour in clay-sand mixed sediments at near-threshold velocity for sand. J. Hydraul. Eng. 2010, 136, 597–609. [Google Scholar] [CrossRef]
- Link, O.; Gobert, C.; Manhart, M.; Zanke, U. Effect of the horseshoe vortex system on the geometry of a developing scour hole at a cylinder. In Proceedings of the 4th International Conference on Scour and Erosion (ICSE-4), Tokyo, Japan, 5–7 November 2008; pp. 162–168. [Google Scholar]
- Ballio, F.; Radice, A. A non-touch sensor for local scour measurements. J. Hydraul. Res. 2003, 41, 105–108. [Google Scholar] [CrossRef]
- Link, O.; Klischies, K.; Montalva, G.; Dey, S. Effects of bed compaction on scour at piers in sand-clay mixtures. J. Hydraul. Eng. 2013, 139, 1013–1019. [Google Scholar] [CrossRef]
- Umeda, S.; Yamazaki, T.; Ishida, H. Time evolution of scour and deposition around a cylindrical pier in steady flow. In Proceedings of the 4th International Conference on Scour and Erosion (ICSE-4), Tokyo, Japan, 5–7 November 2008; pp. 140–146. [Google Scholar]
- Baglio, S.; Faraci, C.; Foti, E.; Musumeci, R. Measurements of the 3-D scour process around a pile in an oscillating flow through a stereo vision approach. Measurement 2001, 30, 145–160. [Google Scholar] [CrossRef]
- Bouratsis, P.; Diplas, P.; Dancey, C.L.; Apsilidis, N. High-resolution 3-D monitoring of evolving sediment beds. Water Resour. Res. 2013, 49, 977–992. [Google Scholar] [CrossRef]
- Sumer, B.M.; Petersen, T.U.; Locatelli, L.; Fredsøe, J.; Musumeci, R.E.; Foti, E. Backfilling of a scour hole around a pile in waves and current. J. Waterw. Port Coastal Ocean. Eng. 2013, 139, 9–23. [Google Scholar] [CrossRef]
- Bento, A.M.; Couto, L.; Viseu, T.; Pêgo, J.P. Image-based techniques for the advanced characterization of scour around bridge piers in laboratory. J. Hydraul. Eng. 2022, 148, 06022004. [Google Scholar] [CrossRef]
- Foti, E.; Rabionet, I.C.; Marini, A.; Musumeci, R.E.; Sánchez-Arcilla, A. Experimental investigations of the bed evolution in wave flumes: Performance of 2D and 3D optical systems. Coast. Eng. 2011, 58, 606–622. [Google Scholar] [CrossRef]
- Bouratsis, P.; Diplas, P.; Dancey, C.L.; Apsilidis, N. Quantitative spatio-temporal characterization of scour at the base of a cylinder. Water 2017, 9, 227. [Google Scholar] [CrossRef]
- Poggi, D.; Kudryavtseva, N.O. Non-intrusive underwater measurement of local scour around a bridge pier. Water 2019, 11, 2063. [Google Scholar] [CrossRef]
- Lachaussée, F.; Bertho, Y.; Morize, C.; Sauret, A.; Gondret, P. Competitive dynamics of two erosion patterns around a cylinder. Phys. Rev. Fluids 2018, 3, 012302. [Google Scholar] [CrossRef]
- Roulund, A.; Sumer, B.M.; Fredsøe, J.; Michelsen, J. Numerical and experimental investigation of flow and scour around a circular pile. J. Fluid Mech. 2005, 534, 351–401. [Google Scholar] [CrossRef]
- Ma, L.; Wang, L.; Guo, Z.; Jiang, H.; Gao, Y. Time development of scour around pile groups in tidal currents. Ocean. Eng. 2018, 163, 400–418. [Google Scholar] [CrossRef]
- Sirianni, D.A.B.; Valela, C.; Rennie, C.D.; Nistor, I.; Almansour, H. Effects of developing ice covers on bridge pier scour. J. Hydraul. Res. 2022, 60, 645–655. [Google Scholar] [CrossRef]
- Bestawy, A.; Eltahawy, T.; Alsaluli, A.; Almaliki, A.; Alqurashi, M. Reduction of local scour around a bridge pier by using different shapes of pier slots and collars. Water Supply 2020, 20, 1006–1015. [Google Scholar] [CrossRef]
- Yagci, O.; Yildirim, I.; Celik, M.F.; Kitsikoudis, V.; Duran, Z.; Kirca, V.S.O. Clear water scour around a finite array of cylinders. Appl. Ocean. Res. 2017, 68, 114–129. [Google Scholar] [CrossRef]
- Wu, M.; De Vos, L.; Chavez, C.E.A.; Stratigaki, V.; Whitehouse, R.; Baelus, L.; Troch, P. A study of scale effects in experiments of monopile scour protection stability. Coast. Eng. 2022, 178, 104217. [Google Scholar] [CrossRef]
- Raju, R.D.; Nagarajan, S.; Arockiasamy, M.; Castillo, S. Feasibility of Using Green Laser in Monitoring Local Scour around Bridge Pier. Geomatics 2022, 2, 355–369. [Google Scholar] [CrossRef]
- Lyu, X.; Cheng, Y.; Wang, W.; An, H.; Li, Y. Experimental study on local scour around submerged monopile under combined waves and current. Ocean. Eng. 2021, 240, 109929. [Google Scholar] [CrossRef]
- Huang, K.; Wu, X.; Lin, Z. An advanced laboratorial measurement technique of scour topography based on the fusion method for 3D reconstruction. J. Ocean. Eng. Sci. 2023; in press. [Google Scholar] [CrossRef]
- Zhou, K.; Duan, J.G.; Bombardelli, F. Experimental and theoretical study of local scour around three-pier group. J. Hydraul. Eng. 2020, 146, 04020069. [Google Scholar] [CrossRef]
- Whitehouse, R. Scour at Marine Structures: A Manual for Practical Applications; Thomas Telford: London, UK, 1998. [Google Scholar]
- NortekAs, Vectrino Profiler. Available online: http://www.nortek-as.com/en/products/velocimeters/vectrino-ii (accessed on 15 September 2020).
- Gupta, M.; Nakhate, N. A geometric perspective on structured light coding. In Proceedings of the European Conference on Computer Vision (ECCV), Munich, Germany, 8–14 September 2018; pp. 87–102. [Google Scholar]
- Wentworth, C.K. A scale of grade and class terms for clastic sediments. J. Geol. 1922, 30, 377–392. [Google Scholar] [CrossRef]
- Soulsby, R.L. Dynamics of marine sands: A manual for practical applications. Oceanogr. Lit. Rev. 1997, 9, 947. [Google Scholar]
- Sleath, J.F. Sea Bed Mechanics; Wiley: New York, NY, USA, 1984. [Google Scholar]
- Sumer, B.M.; Fredsøe, J. Hydrodynamics around Cylindrical Structures; World Scientific: Singapore, 2006; Volume 26. [Google Scholar]
- Photoneo, PhoXi 3D Scanner S Datasheet. Available online: https://www.photoneo.com/products/phoxi-scan-s/ (accessed on 20 November 2020).
- Girardeau-Montaut, D. Détection de Changement sur des Données géométriques Tridimensionnelles. Doctoral Dissertation, Télécom ParisTech, Palaiseau, France, 22 May 2006. [Google Scholar]
- Besl, P.J.; McKay, N.D. A Method for Registration of 3-D Shapes. Sens. Fusion Iv Control. Paradig. Data Struct. 1992, 1611, 586–606. [Google Scholar] [CrossRef]
- Gressin, A.; Mallet, C.; David, N. Improving 3D lidar point cloud registration using optimal neighborhood knowledge. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2012, 1, 111–116. [Google Scholar] [CrossRef]
- Kuçak, R.A.; Erol, S.; Erol, B. An experimental study of a new keypoint matching algorithm for automatic point cloud registration. ISPRS Int. J. Geo-Inf. 2021, 10, 204. [Google Scholar] [CrossRef]
- Lague, D.; Brodu, N.; Leroux, J. Accurate 3D comparison of complex topography with terrestrial laser scanner: Application to the Rangitikei canyon (NZ). ISPRS J. Photogramm. Remote Sens. 2013, 82, 10–26. [Google Scholar] [CrossRef]
- Photoneo, PhoXi Control 1.10—User Manual. Available online: https://www.photoneo.com/downloads/phoxi-control/ (accessed on 20 November 2020).
- Rajendra, Y.D.; Mehrotra, S.C.; Kale, K.V.; Manza, R.R.; Dhumal, R.K.; Nagne, A.D.; Vibhute, A.D. Evaluation of Partially Overlapping 3D Point Cloud’s Registration by using ICP variant and CloudCompare. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2014, 40, 891–897. [Google Scholar] [CrossRef]
- Yang, H.; Omidalizarandi, M.; Xu, X.; Neumann, I. Terrestrial laser scanning technology for deformation monitoring and surface modeling of arch structures. Compos. Struct. 2017, 169, 173–179. [Google Scholar] [CrossRef]
- Moler, C.; Little, J.; Bangert, S. MATLAB Users’ Guide; University of New Mexico: Albuquerque, NM, USA, 1982. [Google Scholar]
- Sarkar, K.; Chakraborty, C.; Mazumder, B.S. Variations of bed elevations due to turbulence around submerged cylinder in sand beds. Environ. Fluid Mech. 2016, 16, 659–693. [Google Scholar] [CrossRef]
- Wei, G. Numerical Simulation of Scour Process around Bridge Piers in Cohesive Soil. Doctoral Dissertation, Texas A&M University, College Station, TX, USA, 1997. [Google Scholar]
- Dargahi, B. Controlling mechanism of local scouring. J. Hydraul. Eng. 1990, 116, 1197–1214. [Google Scholar] [CrossRef]
- Dey, S. Time-variation of scour in the vicinity of circular piers. Proc. Inst. Civ. Eng. Water Marit. Energy 1999, 136, 67–75. [Google Scholar] [CrossRef]
- Al-Hammadi, M.; Simons, R.R. Local scour mechanism around dynamically active marine structures in noncohesive sediments and unidirectional current. J. Waterw. Port Coastal Ocean. Eng. 2020, 146, 04019026. [Google Scholar] [CrossRef]
- Melville, B.W. Local Scour at Bridge Sites. Doctoral Dissertation, University of Auckland, Auckland, New Zealand, 1975. [Google Scholar]
- Harris, J.M.; Whitehouse, R.J.S. Marine scour: Lessons from nature’s laboratory. In Proceedings of the 7th International Conference on Scour and Erosion, Perth, Australia, 2–4 December 2014; CRC Press: Boca Raton, FL, USA, 2015; Volume 11426, pp. 19–31. [Google Scholar]
- Zhao, M.; Cheng, L.; Zang, Z. Experimental and numerical investigation of local scour around a submerged vertical circular cylinder in steady currents. Coast. Eng. 2010, 57, 709–721. [Google Scholar] [CrossRef]
- Laursen, E.M.; Toch, A. Scour around bridge piers and abutments. In Bulletin NO.4 Iowa Highway Research Board; Iowa Highway Research Board: Ames, IA, USA, 1956. [Google Scholar]
- Yilmaz, M.; Yanmaz, A.M.; Koken, M. Clear-water scour evolution at dual bridge piers. Can. J. Civ. Eng. 2017, 44, 298–307. [Google Scholar] [CrossRef]
- Ettema, R.; Melville, B.W.; Constantinescu, G. Evaluation of Bridge Scour Research: Pier Scour Processes and Predictions; Report NCHRP Project 24-27(01); Citeseer: State College, PA, USA, 2011. [Google Scholar]
- Elsebaie, I.H. An experimental study of local scour around circular bridge pier in sand soil. Int. J. Civ. Environ. Eng. IJCEE-IJENS 2013, 13, 23–28. [Google Scholar]
- Manes, C.; Brocchini, M. Local scour around structures and the phenomenology of turbulence. J. Fluid Mech. 2015, 779, 309–324. [Google Scholar] [CrossRef]
- Sumer, B.M.; Fredsøe, J.; Christiansen, N. Scour around vertical pile in waves. J. Waterw. Port Coast. Ocean. Eng. 1992, 118, 15–31. [Google Scholar] [CrossRef]
- Auzerais, A.; Jarno, A.; Ezersky, A.; Marin, F. Formation of localized sand patterns downstream from a vertical cylinder under steady flows: Experimental and theoretical study. Phys. Rev. E 2016, 94, 052903. [Google Scholar] [CrossRef]
- Ting, F.C.K.; Briaud, J.L.; Chen, H.C.; Gudavalli, R.; Perugu, S.; Wei, G. Flume tests for scour in clay at circular piers. J. Hydraul. Eng. 2001, 127, 969–978. [Google Scholar] [CrossRef]
- Briaud, J.L.; Ting, F.C.K.; Chen, H.C.; Gudavalli, R.; Perugu, S.; Wei, G. SRICOS: Prediction of scour rate in cohesive soils at bridge piers. J. Geotech. Geoenviron. Eng. 1999, 125, 237–246. [Google Scholar] [CrossRef]
- Valela, C.; Sirianni, D.A.B.; Nistor, I.; Rennie, C.D.; Almansour, H. Bridge pier scour under ice cover. Water 2021, 13, 536. [Google Scholar] [CrossRef]
- Zaidan, J.; Bennabi, A.; Poupardin, A.; Benamar, A.; Marin, F. Spatio-temporal characterisation of local scour around a circular bridge pier in cohesive soil with different clay/silt ratio. Eur. J. Environ. Civ. Eng. 2024, 28, 1–20. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Signal wavelength | around 639 nm in the red spectrum |
| Resolution | Up to 3.2 million points |
| Scanning volume shape | Trapezoidal |
| Scanning range | 384–520 mm |
| Optimum scanning distance | 442 mm |
| Scanning area at optimum distance | 360 × 286 mm |
| Scanning time | 250–2250 ms |
| Cost | around 20,000 € |
| Sediment Properties | Flow Condition | ||
|---|---|---|---|
| medium diameter (μm) | 1700 | Depth-averaged flow rate Q (m3/h) | 65 |
| Geometric standard deviation = | 1.2 | Water depth h (m) | 0.15 |
| Uniformity coefficient | 1.4 | Depth-averaged current velocity V (m/s) | 0.29 |
| Coefficient of curvature | 1 | Reynolds number based on the water depth | 43,500 |
| Internal friction angle (°) | 35 | Reynolds number based on the pier diameter | 9280 |
| Cohesion C (kPa) | 0 | Froude number | 0.24 |
| Initial moisture content (%) | 4 | Flow intensity | 0.7 |
| Dry weight density (t/m3) | 1.7 | ||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zaidan, J.; Poupardin, A.; Bennabi, A.; Marin, F.; Benamar, A. Novel 3D Structural-Light Scanner Technique for Continuous Monitoring of Pier Scour in Laboratory. J. Mar. Sci. Eng. 2024, 12, 1566. https://doi.org/10.3390/jmse12091566
Zaidan J, Poupardin A, Bennabi A, Marin F, Benamar A. Novel 3D Structural-Light Scanner Technique for Continuous Monitoring of Pier Scour in Laboratory. Journal of Marine Science and Engineering. 2024; 12(9):1566. https://doi.org/10.3390/jmse12091566
Chicago/Turabian StyleZaidan, Jana, Adrien Poupardin, Abdelkrim Bennabi, François Marin, and Ahmed Benamar. 2024. "Novel 3D Structural-Light Scanner Technique for Continuous Monitoring of Pier Scour in Laboratory" Journal of Marine Science and Engineering 12, no. 9: 1566. https://doi.org/10.3390/jmse12091566
APA StyleZaidan, J., Poupardin, A., Bennabi, A., Marin, F., & Benamar, A. (2024). Novel 3D Structural-Light Scanner Technique for Continuous Monitoring of Pier Scour in Laboratory. Journal of Marine Science and Engineering, 12(9), 1566. https://doi.org/10.3390/jmse12091566