
Effect of Particle Trap on Motion Characteristics of Metal Particles in AC GILs and Parameter Optimization


Abstract
:1. Introduction
2. Materials and Methods: Motion Characteristics of Metal Particles in Front of Trap
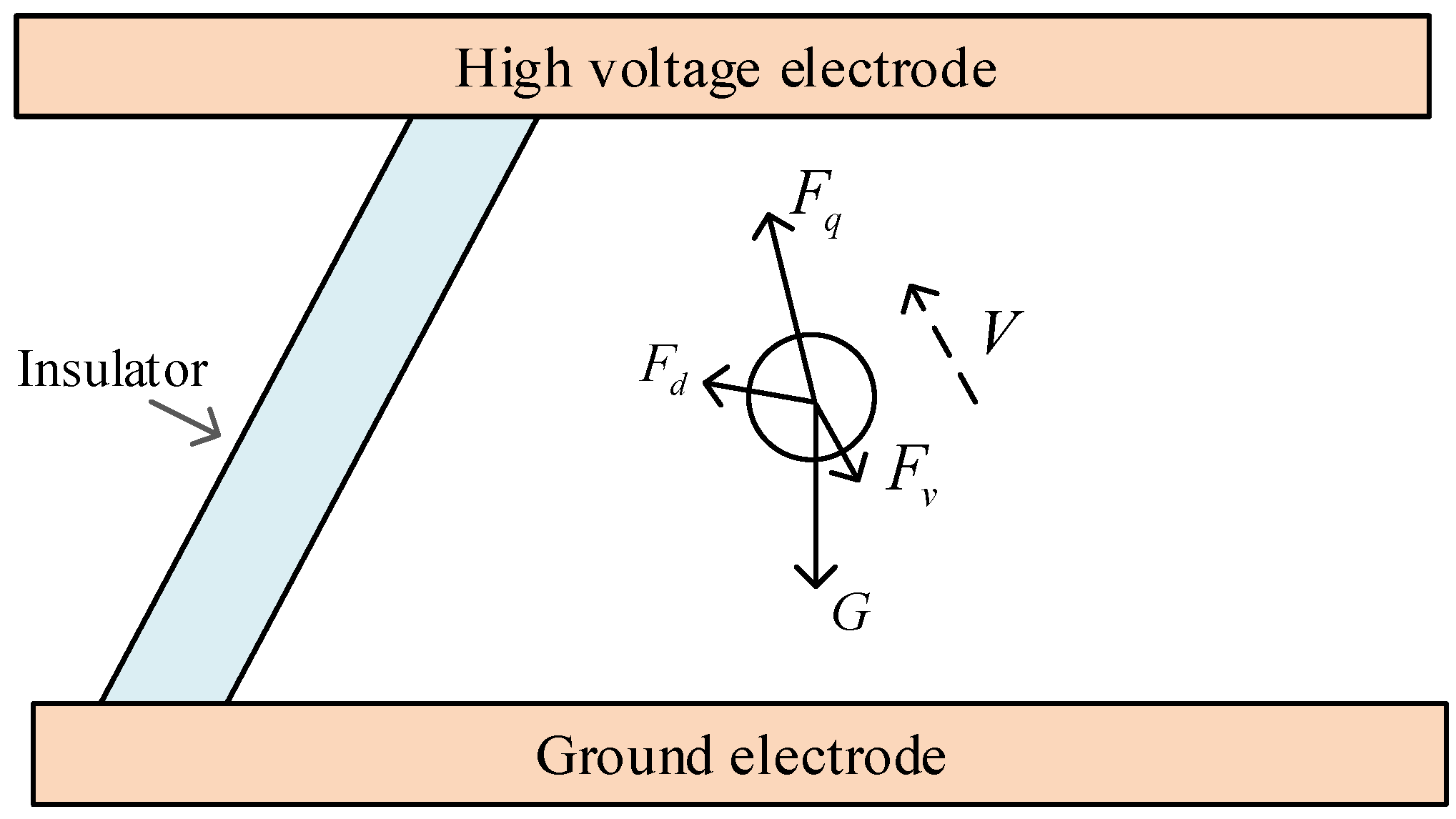
2.1. Motion Model
2.2. Simulation Analysis of Motion Characteristics
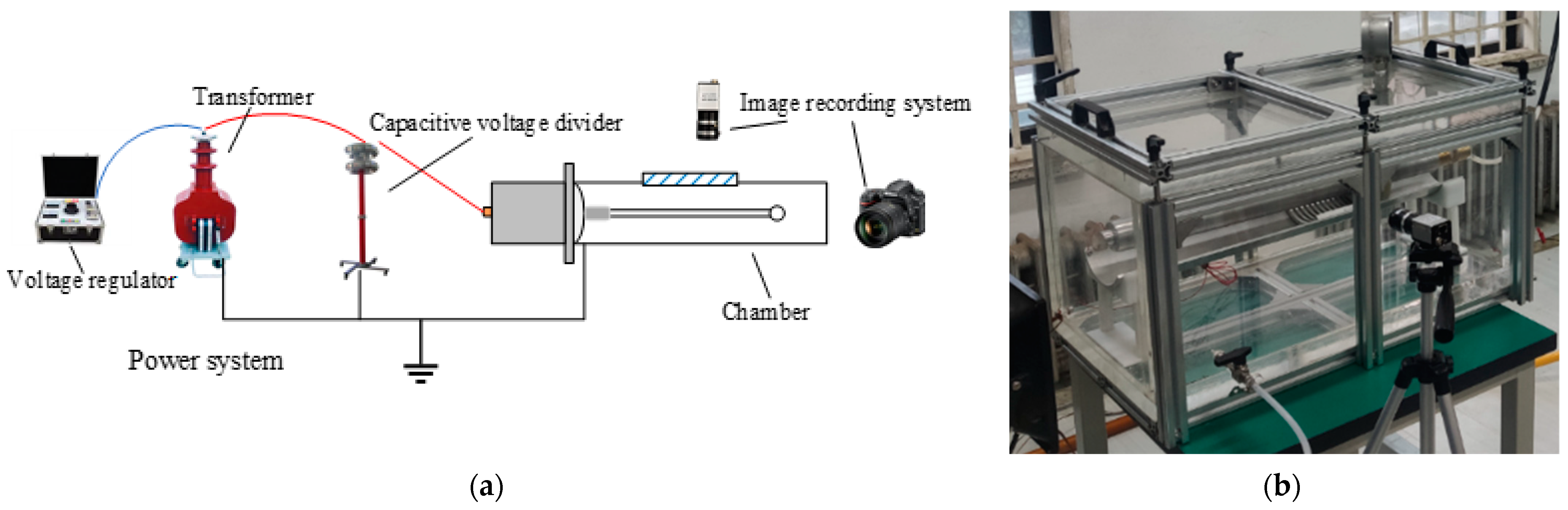
2.3. Tests of Motion Characteristics
3. Parameter Optimization of Particle Trap
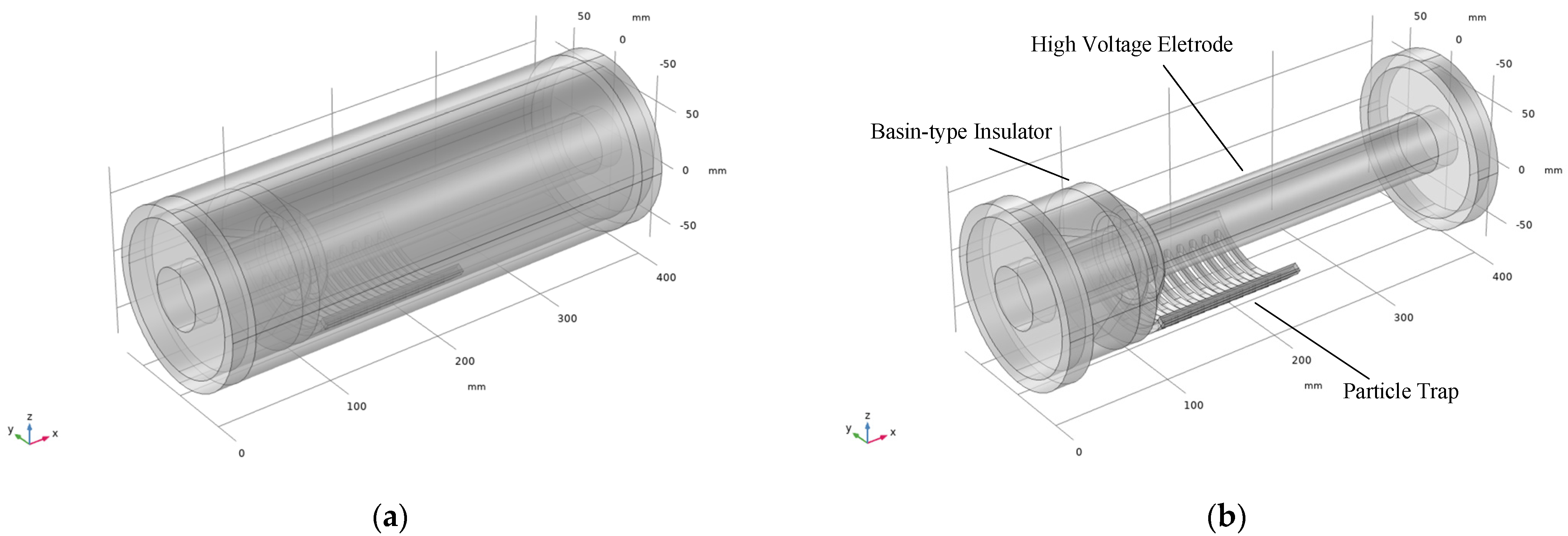
3.1. Simulation Model of Trap Optimization
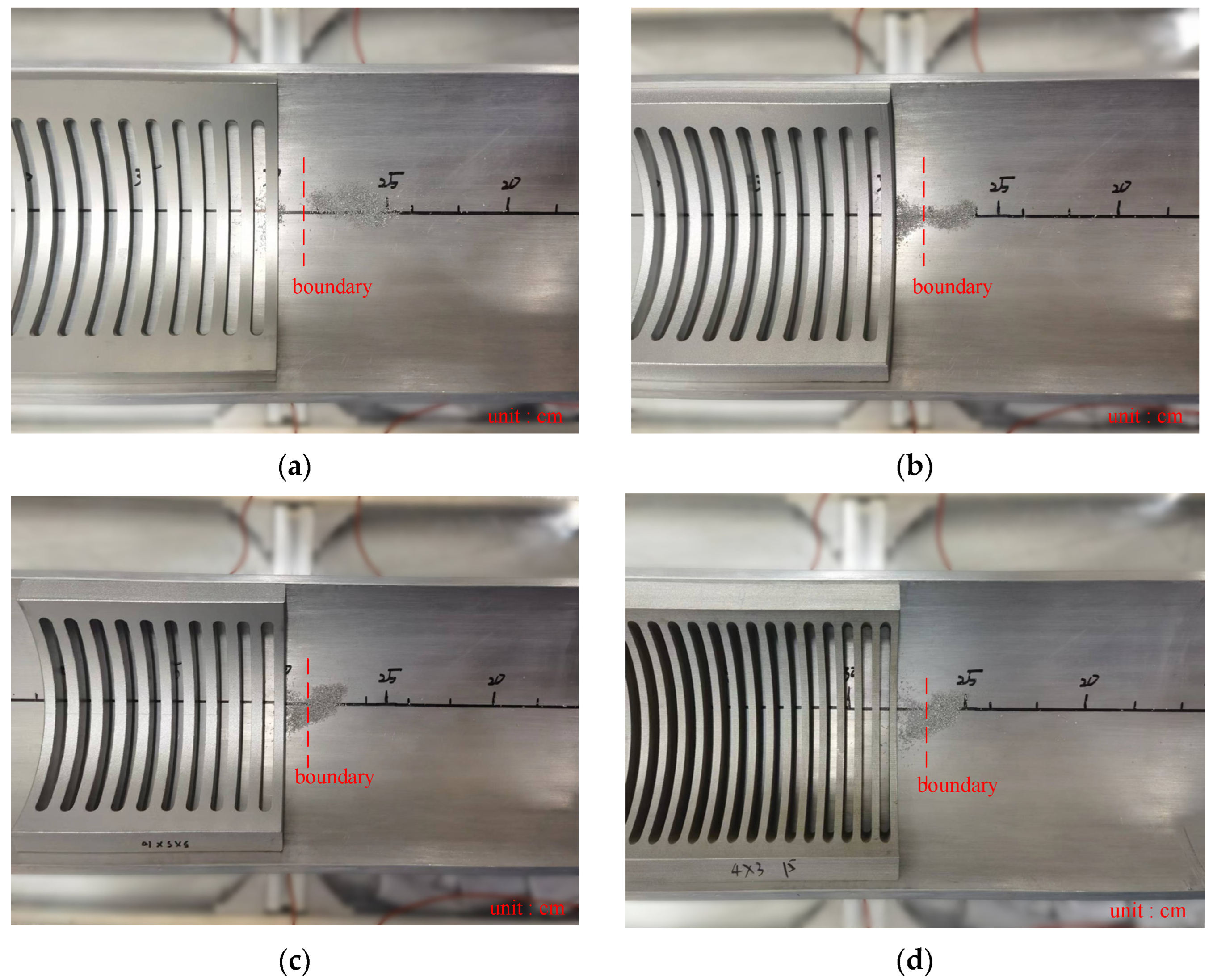
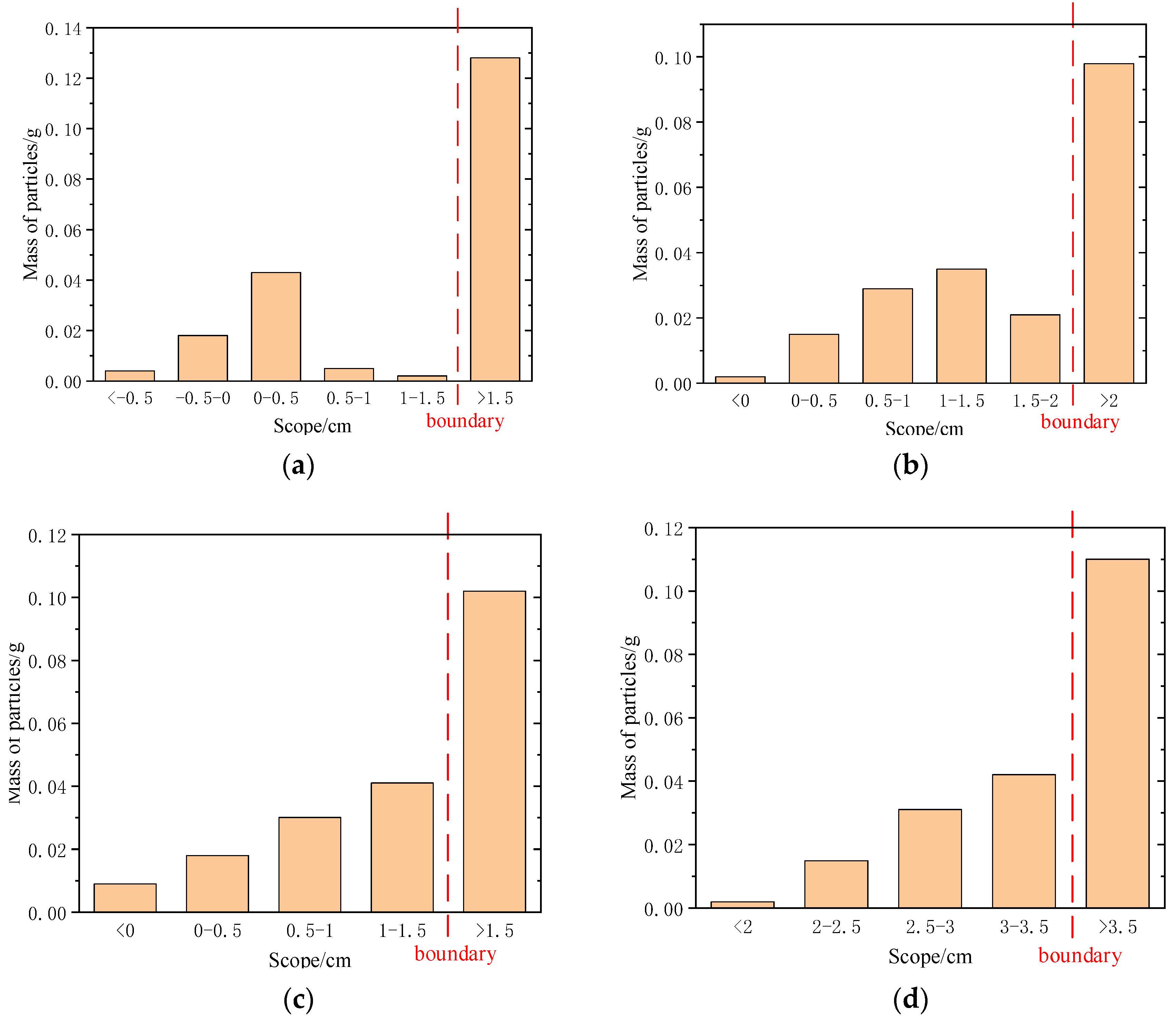
3.2. Experimental Verification of Trap Optimization
4. Conclusions
- -
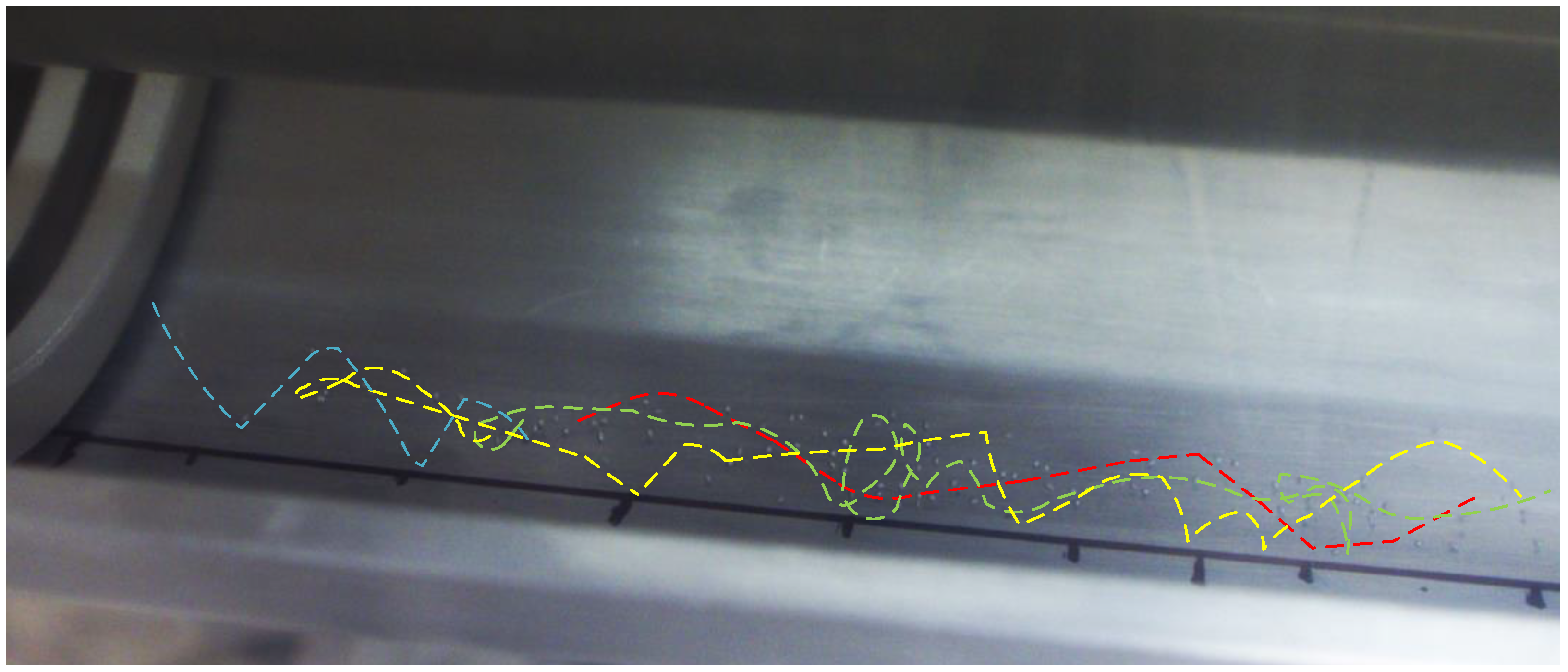
- Under AC voltage, the motion activity of metal particles was low and, when affected by alternating current voltage and collision randomness, the motion randomness of metal particles was strong.
- -
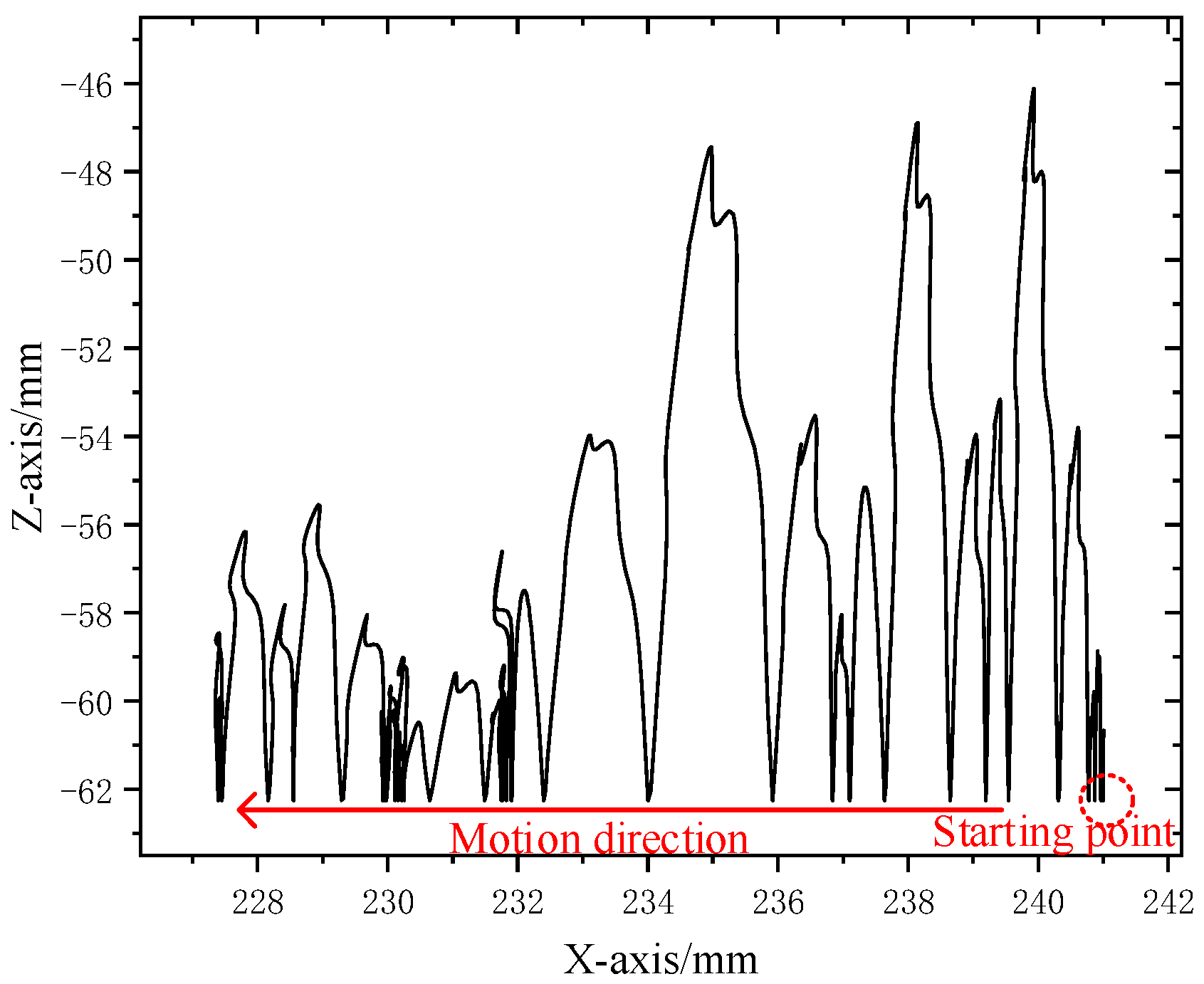
- The metal particles located in front of the trap were mainly far away from the trap in a fluctuating up–down movement trend. In other particles moving towards the trap, some particles were affected by the low-electric-field area in front of the trap and stayed in front of the trap, while some particles fell from the top of the trap into the trap and were captured by the particle trap.
- -
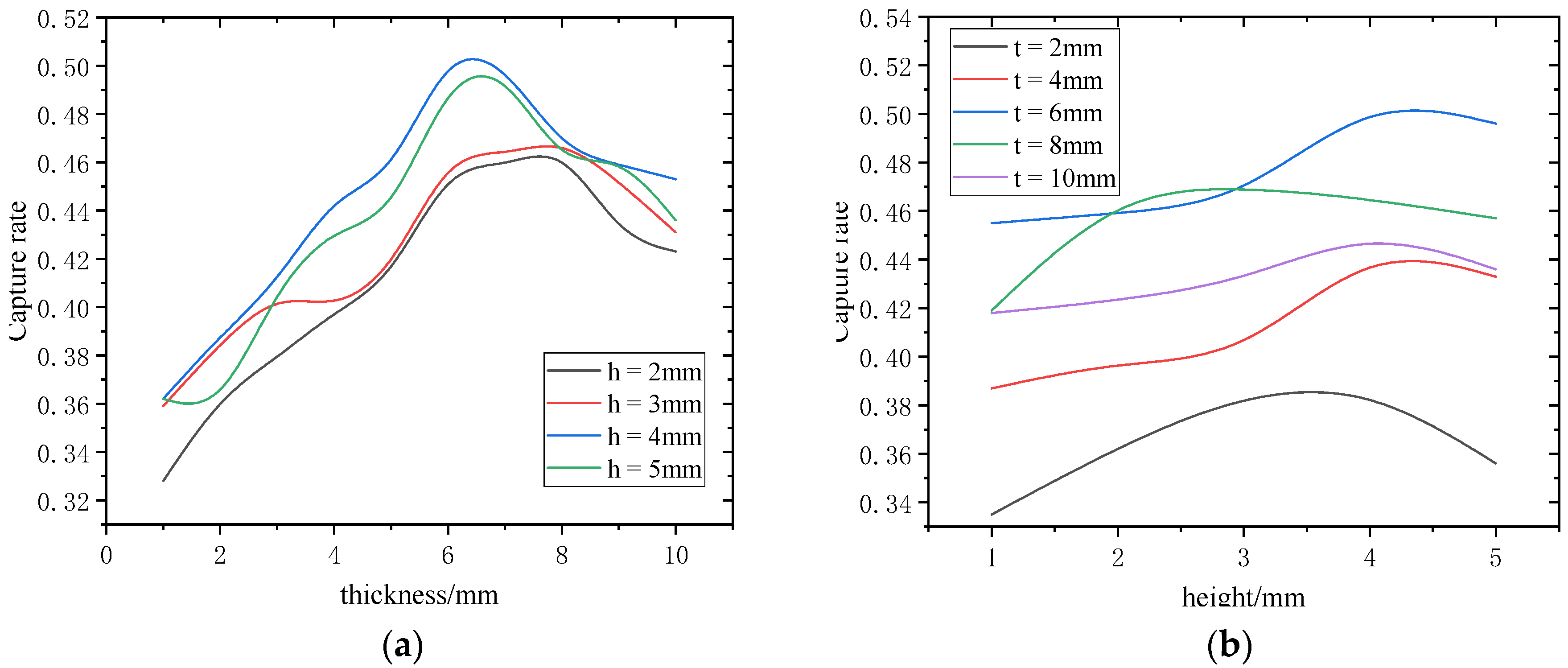
- The effect of trap thickness and height on the capture rate showed a trend of first increasing and then decreasing. Within the scope of this study, the maximum capture rate could reach about 50.8% when the trap thickness was 6 mm and the trap height was 4 mm.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Xiao, D.; Yan, J. Application and Development of Gas Insulated Transmission Line (GIL). High Volt. Eng. 2017, 43, 699–707. [Google Scholar] [CrossRef]
- Koch, H. Gas-Insulated Transmission Line (GIL); John Wiley & Sons: Hoboken, NJ, USA, 2011; pp. 1–5. [Google Scholar]
- Li, P.; Yan, X.; Wang, H.; Zhang, Q.; Jin, G.; Gao, Y. Research and Application of UHVAC Gas-Insulated Transmission Line. Power Syst. Technol. 2017, 41, 3161–6167. [Google Scholar] [CrossRef]
- Du, B.; Du, Q.; Li, J.; Li, A.; Fu, M.; Xiao, W. Surface Charge Dynamic Behaviors of Epoxy/BN Composite with High Thermal Conductivity for Gas Insulated Transmission Pipeline. High Volt. Eng. 2018, 44, 2646–2653. [Google Scholar] [CrossRef]
- Ran, Z.; Du, B.; Li, J.; Li, Z.; Fu, M.; Luo, B. Research Status of Fluorination Modification of Epoxy Resin Insulators in Transmission Pipelines. Guangdong Electr. Power 2018, 31, 18–26. [Google Scholar]
- Gao, K.; Yan, X.; Wang, H.; He, J.; Li, Z.; Bai, C.; Liu, Y.; Huang, H. Progress in Environment-friendly Gas-insulated Transmission Line (GIL). High Volt. Eng. 2018, 44, 3105–3113. [Google Scholar] [CrossRef]
- Wang, L.; Zhou, W.; Zhang, T.; Liu, W.; Hu, S.; Yu, J. Power Frequency Insulation Performance of C4F7N/CO2 Mixture Under Uniform and Extremely Non-uniform Electric Field. High Volt. Eng. 2019, 45, 1101–1107. [Google Scholar] [CrossRef]
- Morcos, M.; Ward, S.; Anis, H.; Srivastava, K.; Gubanski, S. Insulation integrity of GIS/GITL systems and management of particle contamination. IEEE Electr. Insul. Mag. 2000, 16, 25–37. [Google Scholar] [CrossRef]
- Li, J.; Li, X.; Lv, Y.; Sun, H.; Gao, G.; Zhang, Q. Study on the Charge Characteristics and Movement Pattern of Lamellar Particles Under Power Frequency Voltage. Proc. CSEE 2021, 41, 1166–1175. [Google Scholar] [CrossRef]
- Asano, K.; Hishinuma, R.; Yatsuzuka, Y. Bipolar DC corona discharge from a floating filamentary metal particle. IEEE Trans. Ind. Appl. 2002, 38, 57–63. [Google Scholar] [CrossRef]
- Li, Q.; Wang, J.; Li, B.; Liu, S.; Chen, C.; Li, C. Review on Metal Particle Contamination in GIS/GIL. High Volt. Eng. 2016, 42, 849–860. [Google Scholar] [CrossRef]
- Negara, Y.; Yaji, K.; Imasaka, K.; Hayashi, N.; Hara, M. AC particle-triggered corona discharge in low pressure SF6 gas. IEEE Trans. Dielectr. Electr. Insul. 2007, 14, 91–100. [Google Scholar] [CrossRef]
- Sun, J.; Chen, W.; Li, Z.; Yan, X.; Yang, P.; Liu, H. Charge Estimation and Impact Analysis of Moving Metal Particle Under DC Electric Field. High Volt. Eng. 2018, 44, 779–786. [Google Scholar] [CrossRef]
- Lv, F.; Liui, H.; Yin, K.; Li, Z.; Dong, M.; Cao, D.; Xie, Q. Numerical Simulation and Discharge Characteristic Analysis of Metallic Particle Motion in Non-uniform Electric Field of DC GIL. Proc. CSEE 2017, 37, 2798–2806. [Google Scholar] [CrossRef]
- Sakai, K.I.; Abella, D.; Khan, Y.; Suehiro, J.; Hara, M. Experimental studies of free conducting wire particle behavior between nonparallel plane electrodes with AC voltages in air. IEEE Trans. Dielectr. Electr. Insul. 2003, 10, 418–424. [Google Scholar] [CrossRef]
- Khan, Y.; Sakai, K.; Lee, E.; Suehiro, J.; Hara, M. Motion behavior and deactivation method of free-conducting particle around spacer between diverging conducting plates under DC voltage in atmospheric air. IEEE Trans. Dielectr. Electr. Insul. 2003, 10, 444–457. [Google Scholar] [CrossRef]
- Lv, F.; Zhao, Z.; Zhan, Z.; Ma, K. Research Development of Treatment Method for Metal Particles in GIL. Guangdong Electr. Power 2020, 33, 94–109. [Google Scholar]
- Westinghouse Electric Corporation. Particle Trap in Gas Insulated Transmission Line. U.S. Patent 2,087,634, 27 April 1982.
- Trump, J.G. Dust Precipitator. U.S. Patent 3,515,939, 2 July 1970. [Google Scholar]
- Wang, J.; Ni, X.; Wang, Z.; Li, Q.; Li, C. Trapping Probability and Designing Optimization of Particle Trap in DC GIL. High Volt. Eng. 2018, 44, 4090–4097. [Google Scholar] [CrossRef]
- Lv, F.; Ma, K.; Liu, H.; Wang, S.; Zhan, Z. Capture Mechanism Analysis and Optimization Design of DC GIL Particle Trap. Proc. CSEE 2021, 1–15. [Google Scholar]
- Jia, J.; Chen, S.; Yang, L.; Zhang, Q. Study of Deactivation of Free Conducting Particle near Spacer in GIS. High Volt. Appar. 2004, 40, 370–372. [Google Scholar]
- Sakai, K.; Abella, D.; Suehiro, J.; Hara, M. Charging and behavior of a spherically conducting particle on a dielectrically coated electrode in the presence of electrical gradient force in atmospheric air. IEEE Trans. Dielectr. Electr. Insul. 2002, 9, 577–588. [Google Scholar] [CrossRef]
- Ma, K.; Liu, H.; Wang, Q.; Wang, S.; Lv, F. Study on Movement and Distribution Characteristics of Metal Particle Dust in DC GIL. IEEE Trans. Dielectr. Electr. Insul. 2022, 29, 1208–1217. [Google Scholar] [CrossRef]
- Wang, J. Research on the Moving Mechanisms of Charged Metal Particles in DC GIL and Suppressing Methods. Ph.D. Thesis, North China Electric Power University, Beijing, China, 2017. [Google Scholar]
- Zhan, Z.; Song, M.; Lv, F.; Li, Z.; Liu, Y.; Liu, W.; Xie, Q. Study on Particle Movement and Trap Suppression in AC Environmentally Friendly GIL. Proc. CSEE 2019, 39, 278–286. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Type | Equation | |
| Electric field force | (2) | |
| Dielectrophoretic (DEP) force | (3) | |
| Drag force | (4) | |
| Gravity (without buoyancy) | (5) |
| Item | Value | Item | Value |
|---|---|---|---|
| Diameter of high-voltage electrode | 50 mm | Trap slot width | 5 mm |
| Inner diameter of chamber | 125 mm | Thickness of trap | 5 mm |
| Inclination angle of insulator | 45° | Number of slots | 10 |
| Trap slot distance | 5 mm | Height of trap | 3 mm |
| Number | Thickness/mm | Height/mm |
|---|---|---|
| 1 | 2 | 4 |
| 2 | 6 | 4 |
| 3 | 6 | 5 |
| 4 | 10 | 4 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, S.; Liu, H.; Ma, K.; Ou, Q.; Geng, H.; Lv, F. Effect of Particle Trap on Motion Characteristics of Metal Particles in AC GILs and Parameter Optimization. Coatings 2022, 12, 981. https://doi.org/10.3390/coatings12070981
Wang S, Liu H, Ma K, Ou Q, Geng H, Lv F. Effect of Particle Trap on Motion Characteristics of Metal Particles in AC GILs and Parameter Optimization. Coatings. 2022; 12(7):981. https://doi.org/10.3390/coatings12070981
Chicago/Turabian StyleWang, Shenghui, Huaqi Liu, Kang Ma, Qi Ou, Hui Geng, and Fangcheng Lv. 2022. "Effect of Particle Trap on Motion Characteristics of Metal Particles in AC GILs and Parameter Optimization" Coatings 12, no. 7: 981. https://doi.org/10.3390/coatings12070981
APA StyleWang, S., Liu, H., Ma, K., Ou, Q., Geng, H., & Lv, F. (2022). Effect of Particle Trap on Motion Characteristics of Metal Particles in AC GILs and Parameter Optimization. Coatings, 12(7), 981. https://doi.org/10.3390/coatings12070981