
On the Positive Role of Noise and Error in Complex Systems



{kind=link}
Abstract
:1. Introduction
2. Three Examples from Different Realms
2.1. Adaptation and Evolution through Affordances
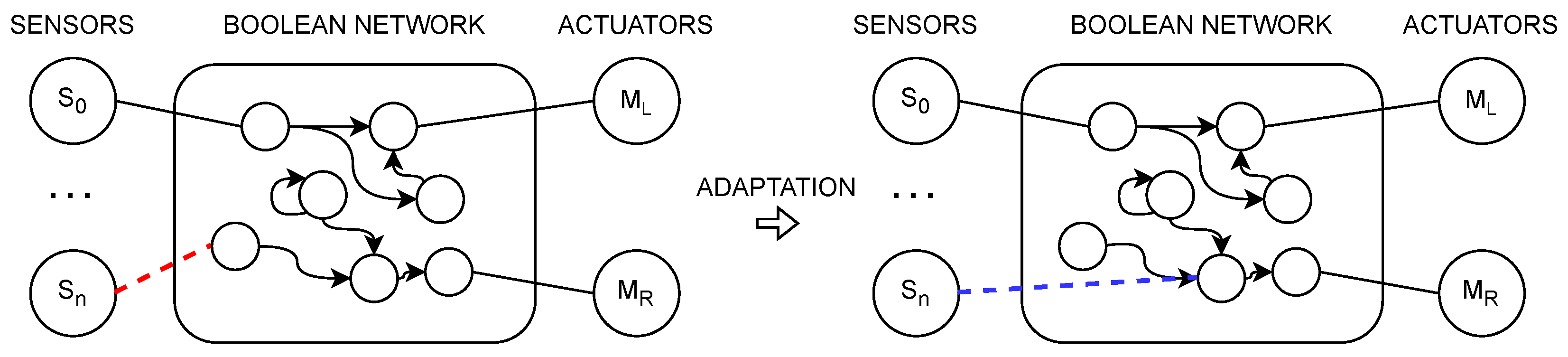
2.2. Adaptation of Robots Controlled by Noisy Sensors
2.3. Improvisation in Music
2.4. A General Mechanism
- i.
- The system’s behavior is determined by . The space of possible variations and extensions of is, in principle, “unprestatable” [31].
- ii.
- A perturbation in the form of noise or error takes place.
- iii.
- A process for revising or extending is triggered. The adjacent possible of the system depends on the perturbation received, the goals, and the repertoire of actions.
- iv.
- A new configuration is seized.
3. Positive Effects of Noise and Error as Well as Conditions Enabling Them
3.1. Multilevel Organization
3.2. Redundancy
3.3. Incompleteness
3.4. Criticality
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Minati, G.; Vitiello, G. Mistake making machines. In Systemics of Emergence: Research and Development; Springer: Berlin/Heidelberg, Germany, 2006; pp. 67–78. [Google Scholar]
- Benzi, R.; Sutera, A.; Vulpiani, A. The mechanism of stochastic resonance. J. Phys. A 1981, 14, L453. [Google Scholar] [CrossRef]
- McDonnell, M.; Abbott, D. What is stochastic resonance? Definitions, misconceptions, debates, and its relevance to biology. PLoS Comput. Biol. 2009, 5, e1000348. [Google Scholar] [CrossRef] [PubMed]
- Gibson, J. The Senses Considered as Perceptual Systems; Houghton Mifflin: Boston, MA, USA, 1966. [Google Scholar]
- Campbell, C.; Olteanu, A.; Kull, K. Learning and knowing as semiosis: Extending the conceptual apparatus of semiotics. Sign Syst. Stud. 2019, 47, 352–381. [Google Scholar] [CrossRef]
- Jamone, L.; Ugur, E.; Cangelosi, A.; Fadiga, L.; Bernardino, A.; Piater, J.; Santos-Victor, J. Affordances in psychology, neuroscience, and robotics: A survey. IEEE Trans. Cogn. Dev. Syst. 2016, 10, 4–25. [Google Scholar] [CrossRef]
- Walsh, D. Organisms, Agency, and Evolution; Cambridge University Press: Cambridge, UK, 2015. [Google Scholar]
- Roli, A.; Kauffman, S. Emergence of Organisms. Entropy 2020, 22, 1163. [Google Scholar] [CrossRef] [PubMed]
- Roli, A.; Jaeger, J.; Kauffman, S. How organisms come to know the world: Fundamental limits on artificial general intelligence. Front. Ecol. Evol. 2022, 9, 1035. [Google Scholar] [CrossRef]
- Heras-Escribano, M. The Philosophy of Affordances; Springer Nature: Cham, Switzerland, 2019. [Google Scholar]
- Jaeger, J. The fourth perspective: Evolution and organismal agency. In Organization in Biology; Springer International Publishing: Cham, Switzerland, 2023; pp. 159–186. [Google Scholar]
- von Uexküll, J. A Foray into the Worlds of Animals and Humans: With a Theory of Meaning; O’Neil, J.D., Translator; University of Minnesota Press: Minneapolis, MN, USA, 2010; Originally published in Germany in 1934. [Google Scholar]
- Kull, K. On semiosis, Umwelt, and semiosphere. Semiotica 1998, 120, 299–310. [Google Scholar]
- Jablonka, E.; Lamb, M. The changing concept of epigenetics. Ann. N. Y. Acad. Sci. 2002, 981, 82–96. [Google Scholar] [CrossRef]
- Gould, S.; Vrba, E. Exaptation—A missing term in the science of form. Paleobiology 1982, 8, 4–15. [Google Scholar] [CrossRef]
- Prum, R.; Brush, A. The evolutionary origin and diversification of feathers. Q. Rev. Biol. 2002, 77, 261–295. [Google Scholar] [CrossRef]
- Persons, W.S., IV; Currie, P. Bristles before down: A new perspective on the functional origin of feathers. Evolution 2015, 69, 857–862. [Google Scholar] [CrossRef] [PubMed]
- Barve, A.; Wagner, A. A latent capacity for evolutionary innovation through exaptation in metabolic systems. Nature 2013, 500, 203–206. [Google Scholar] [CrossRef] [PubMed]
- Kull, K. Evolution, choice, and scaffolding: Semiosis is changing its own building. Biosemiotics 2015, 8, 223–234. [Google Scholar] [CrossRef]
- Corning, P. “How” vs. “Why” questions in symbiogenesis, and the causal role of synergy. Biosystems 2021, 205, 104417. [Google Scholar] [CrossRef] [PubMed]
- Sharov, A. Evolutionary biosemiotics and multilevel construction networks. Biosemiotics 2016, 9, 399–416. [Google Scholar] [CrossRef]
- Edelman, G.; Gally, J. Degeneracy and complexity in biological systems. Proc. Natl. Acad. Sci. USA 2001, 98, 13763–13768. [Google Scholar] [CrossRef]
- Braccini, M.; Baldini, P.; Roli, A. An Investigation of Graceful Degradation in Boolean Network Robots Subject to Online Adaptation. In Artificial Life and Evolutionary Computation—17th Italian Workshop, WIVACE 2023, Venice, Italy, 6–8 September 2023, Revised Selected Papers; Villani, M., Cagnoni, S., Serra, R., Eds.; Springer: Berlin/Heidelberg, Germany, 2023; pp. 202–213. [Google Scholar]
- Kauffman, S. Metabolic stability and epigenesis in randomly constructed genetic nets. J. Theor. Biol. 1969, 22, 437–467. [Google Scholar] [CrossRef]
- Kauffman, S. The Origins of Order: Self-Organization and Selection in Evolution; Oxford University Press: Oxford, UK, 1993. [Google Scholar]
- Drossel, B. Random boolean networks. Rev. Nonlinear Dyn. Complex. 2008, 1, 69–110. [Google Scholar]
- Tomlinson, G. A Million Years of Music: The Emergence of Human Modernity; Princeton University Press: Princeton, NJ, USA, 2015. [Google Scholar]
- Nettl, B.; Wegman, R.C.; Horsley, I.; Collins, M.; Carter, S.A.; Garden, G.; Seletsky, R.E.; Levin, R.D.; Crutchfield, W.; Rink, J.; et al. Improvisation. Grove Music Online, Oxford University Press. 2001. Available online: https://www.oxfordmusiconline.com/grovemusic/display/10.1093/gmo/9781561592630.001.0001/omo-9781561592630-e-0000013738 (accessed on 13 June 2024). [CrossRef]
- Kauffman, S. Investigations; Oxford University Press: Oxford, UK, 2000. [Google Scholar]
- Kauffman, S. Humanity in a Creative Universe; Oxford University Press: Oxford, UK, 2016. [Google Scholar]
- Kauffman, S. A World Beyond Physics: The Emergence and Evolution of Life; Oxford University Press: Oxford, UK, 2019. [Google Scholar]
- Atlan, H. Self creation of meaning. Phys. Scr. 1987, 36, 563. [Google Scholar] [CrossRef]
- Tomasello, M. The Evolution of Agency: Behavioral Organization from Lizards to Humans; MIT Press: Cambridge, MA, USA, 2022. [Google Scholar]
- Cariani, P. Towards an evolutionary semiotics: The emergence of new sign-functions in organisms and devices. In Evolutionary systems; Springer: Berlin/Heidelberg, Germany, 1998; pp. 359–376. [Google Scholar]
- Braccini, M. Metasensor: A proposal for sensor evolution in robotics. arXiv 2024, arXiv:2406.08005. Available online: https://arxiv.org/abs/2406.08005 (accessed on 13 June 2024).
- von Foerster, H. Understanding Understanding. Essays on Cybernetics and Cognition; Springer: Berlin/Heidelberg, Germany, 2003. [Google Scholar]
- Kauffman, S.; Roli, A. A third transition in science? Interface Focus 2023, 13, 20220063. [Google Scholar] [CrossRef] [PubMed]
- Bertinetto, A. “Do not fear mistakes–there are none”—The mistake as surprising experience of creativity in jazz. In Education as Jazz; Cambridge Scholars Publishing: Oxford, UK, 2016; pp. 85–100. [Google Scholar]
- MacKay, D. Information, Mechanism and Meaning; MIT Press: Cambridge, MA, USA, 1969. [Google Scholar]
- Minati, G. Multiplicity, logical openness, incompleteness, and quasi-ness as peculiar non-reductionist properties of complexity. In From Electrons to Elephants and Elections: Exploring the Role of Content and Context; Springer: Oxford, UK, 2022; pp. 151–173. [Google Scholar]
- Penna, M.; Minati, G.; Pessa, E. Towards a general theory of logically open systems. In Proceedings of the 3rd Systems Science European Congress, Rome, Italy, 1–4 October 1996; Pessa, E., Penna, M.P., Montesanto, A., Eds.; Kappa: Rome, Italy, 1996; pp. 957–960. [Google Scholar]
- Minati, G.; Penna, M.; Pessa, E. Thermodynamical and logical openness in general systems. Syst. Res. Behav. Sci. Off. J. Int. Fed. Syst. Res. 1998, 15, 131–145. [Google Scholar] [CrossRef]
- Kauffman, S. Articulation of parts explanation in biology and the rational search for them. In Topics in the Philosophy of Biology; Springer: Berlin/Heidelberg, Germany, 1970; pp. 245–263. [Google Scholar]
- Usó Doménech, J.; Nescolarde-Selva, J.; Lloret-Climent, M.; Gash, H.; Segura-Abad, L. Structure, thermodynamics and information in complex systems. Kybernetes 2023, 52, 5307–5328. [Google Scholar] [CrossRef]
- von Bertalanffy, L. The history and status of general systems theory. Acad. Manag. J. 1972, 15, 407–426. [Google Scholar] [CrossRef]
- Capra, F.; Luisi, P. The Systems View of Life: A Unifying Vision; Cambridge University Press: Cambridge, UK, 2014. [Google Scholar]
- Longo, G. Naturalizing Physics Or, embedding physics in the historicity and materiality of the living. La Deleuziana-Online J. Philos. 2020, 11, 132–149. [Google Scholar]
- Roli, A.; Villani, M.; Filisetti, A.; Serra, R. Dynamical criticality: Overview and open questions. J. Syst. Sci. Complex. 2018, 31, 647–663. [Google Scholar] [CrossRef]
- Muñoz, M. Colloquium: Criticality and dynamical scaling in living systems. Rev. Mod. Phys. 2018, 90, 031001. [Google Scholar] [CrossRef]
- Balleza, E.; Alvarez-Buylla, E.; Chaos, A.; Kauffman, S.; Shmulevich, I.; Aldana, M. Critical dynamics in genetic regulatory networks: Examples from four kingdoms. PLoS ONE 2008, 3, e2456. [Google Scholar] [CrossRef]
- Nykter, M.; Price, N.; Aldana, M.; Ramsey, S.; Kauffman, S.; Hood, L.; Yli-Harja, O.; Shmulevich, I. Gene expression dynamics in the macrophage exhibit criticality. Proc. Natl. Acad. Sci. USA 2008, 105, 1897–1900. [Google Scholar] [CrossRef]
- Villani, M.; La Rocca, L.; Kauffman, S.; Serra, R. Dynamical criticality in gene regulatory networks. Complexity 2018, 2018, 5980636. [Google Scholar] [CrossRef]
- Beggs, J. The criticality hypothesis: How local cortical networks might optimize information processing. Phil. Trans. R. Soc. A 2008, 366, 329–343. [Google Scholar] [CrossRef] [PubMed]
- Braccini, M.; Roli, A.; Barbieri, E.; Kauffman, S. On the Criticality of Adaptive Boolean Network Robots. Entropy 2022, 24, 1368. [Google Scholar] [CrossRef] [PubMed]
- Hoos, H.; Stützle, T. Stochastic Local Search: Foundations and Applications; Morgan Kaufmann Publishers: Burlington, MA, USA, 2004. [Google Scholar]
- Kauffman, S.; Macready, W. Technological evolution and adaptive organizations. Complexity 1995, 26, 26–43. [Google Scholar] [CrossRef]
- Macready, W.; Siapas, A.; Kauffman, S. Criticality and parallelism in combinatorial optimization. Science 1996, 5, 56–59. [Google Scholar] [CrossRef] [PubMed]
- Kauffman, S. At Home in the Universe; Oxford University Press: Oxford, UK, 1996. [Google Scholar]
- Minati, G. Interactions and Interaction Mechanisms as Generators of Complex Systems. WSEAS Trans. Proof 2022, 2, 96–107. [Google Scholar] [CrossRef]
- Kauffman, S.; Roli, A. What is consciousness? Artificial intelligence, real intelligence, quantum mind and qualia. Biol. J. Linn. Soc. 2022, 139, 530–538. [Google Scholar] [CrossRef]
- Stano, P. Chemical systems for wetware artificial life: Selected perspectives in synthetic cell research. Int. J. Mol. Sci. 2023, 24, 14138. [Google Scholar] [CrossRef]
- Kolchinsky, A.; Wolpert, D. Semantic information, autonomous agency and non-equilibrium statistical physics. Interface Focus 2018, 8, 20180041. [Google Scholar] [CrossRef]
- Ruzzante, B.; Del Moro, L.; Magarini, M.; Stano, P. Synthetic cells extract semantic information from their environment. IEEE Trans. Mol. Biol. Multi-Scale Commun. 2023, 9, 23–27. [Google Scholar] [CrossRef]
- Logan, R. What is information?: Why is it relativistic and what is its relationship to materiality, meaning and organization. Information 2012, 3, 68–91. [Google Scholar] [CrossRef]
- Parr, T.; Pezzulo, G.; Friston, K. Active Inference: The Free Energy Principle in Mind, Brain, and Behavior; MIT Press: Cambridge, MA, USA, 2022. [Google Scholar]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Roli, A.; Braccini, M.; Stano, P. On the Positive Role of Noise and Error in Complex Systems. Systems 2024, 12, 338. https://doi.org/10.3390/systems12090338
Roli A, Braccini M, Stano P. On the Positive Role of Noise and Error in Complex Systems. Systems. 2024; 12(9):338. https://doi.org/10.3390/systems12090338
Chicago/Turabian StyleRoli, Andrea, Michele Braccini, and Pasquale Stano. 2024. "On the Positive Role of Noise and Error in Complex Systems" Systems 12, no. 9: 338. https://doi.org/10.3390/systems12090338