
DWT-LSTM-Based Fault Diagnosis of Rolling Bearings with Multi-Sensors

Abstract
:1. Introduction
- 1
- Multi-scale features from multiple sensors are fused in the proposed method for improving the model’s performance.
- 2
- The professional knowledge is used in the entire algorithm design process, which can overcome the disadvantage of the blind training of the deep feature classification model.
- 3
- Accurately identifies 10 different fault types by using the proposed DWT-LSTM method.
2. DWT-LSTM Fault Diagnosis Framework
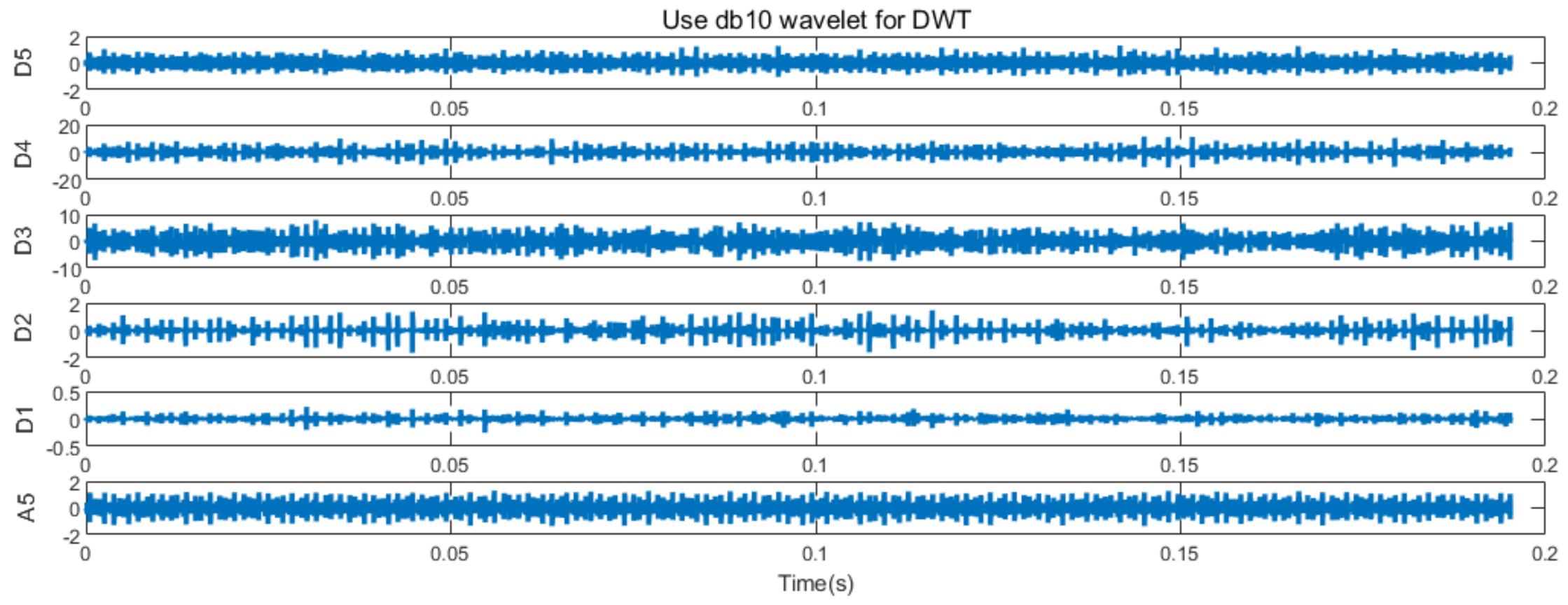
2.1. Discrete Wavelet Transform
2.2. LSTM-Based Fault Classification
2.3. Implementation of the Proposed Fault Diagnosis Strategy
3. Experimental Verification
3.1. The Description of the Dataset
3.2. Simulation Results and Analysis
3.2.1. Description of the Experimental Parameters
3.2.2. Single Sensor vs. Multi-Sensor
3.2.3. DWT-LSTM vs. Other Methods
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Zhao, H.; Wang, T.; Weizu, X.U. Demodulation Method Based on EMD and Hilbert Envelope Applied inFault Diagnosis of Bearing in the Nuclear Plant. Electr. Eng. 2018, 8, 5–8. [Google Scholar]
- Wang, Z.; Zhang, Q.; Xiong, J.; Ming, X.; Sun, G.; He, J. Fault Diagnosis of a Rolling Bearing Using Wavelet Packet Denoising and Random Forests. IEEE Sens. J. 2017, 17, 5581–5588. [Google Scholar] [CrossRef]
- Bianchini, C.; Immovilli, F.; Cocconcelli, M.; Rubini, R.; Bellini, A. Fault Detection of Linear Bearings in Brushless AC Linear Motors by Vibration Analysis. IEEE Trans. Ind. Electron. 2011, 58, 1684–1694. [Google Scholar] [CrossRef]
- Cerrada, M.; Sánchez, R.V.; Li, C.; Pacheco, F.; Cabrera, D.; de Oliveira, J.V.; Vásquez, R.E. A review on data-driven fault severity assessment in rolling bearings. Mech. Syst. Signal Process. 2018, 99, 169–196. [Google Scholar] [CrossRef]
- Betta, G.; Liguori, C.; Paolillo, A.; Pietrosanto, A. A DSP-based FFT-analyzer for the fault diagnosis of rotating machine based on vibration analysis. IEEE Trans. Instrum. Meas. 2002, 51, 1316–1322. [Google Scholar] [CrossRef]
- Cao, H.; Fan, F.; Zhou, K.; He, Z. Wheel-bearing fault diagnosis of trains using empirical wavelet transform. Measurement 2016, 82, 439–449. [Google Scholar] [CrossRef]
- Miao, H.; He, D. Deep Learning Based Approach for Bearing Fault Diagnosis. IEEE Trans. Ind. Appl. 2017, 53, 3057–3065. [Google Scholar] [CrossRef]
- Feng, J.; Lei, Y.; Jing, L.; Xin, Z.; Na, L. Deep neural networks: A promising tool for fault characteristic mining and intelligent diagnosis of rotating machinery with massive data. Mech. Syst. Signal Process. 2016, 72–73, 303–315. [Google Scholar] [CrossRef]
- Lu, W.; Wang, X.; Yang, C.; Tao, Z. A novel feature extraction method using deep neural network for rolling bearing fault diagnosis. In Proceedings of the 27th Chinese Control and Decision Conference (2015 CCDC), Qingdao, China, 23–25 May 2015. [Google Scholar] [CrossRef]
- Piedad, E.J.; Chen, Y.T.; Chang, H.C.; Kuo, C.C. Frequency Occurrence Plot-Based Convolutional Neural Network for Motor Fault Diagnosis. Electronics 2020, 9, 1711. [Google Scholar] [CrossRef]
- Wei, Z.; Peng, G.; Li, C.; Chen, Y.; Zhang, Z. A New Deep Learning Model for Fault Diagnosis with Good Anti-Noise and Domain Adaptation Ability on Raw Vibration Signals. Sensors 2017, 17, 425. [Google Scholar] [CrossRef]
- Zhuang, Y.; Qi, L.I.; Yang, B.; Chen, L.; Shen, C. An End-to-End Approach for Bearing Fault Diagnosis based on LSTM. Noise Vib. Control 2019, 13, 4–6. [Google Scholar]
- Abdul, Z.K.; Al-Talabani, A.K.; Ramadan, D.O. A Hybrid Temporal Feature for Gear Fault Diagnosis Using the Long Short Term Memory. IEEE Sens. J. 2020, 20, 14444–14452. [Google Scholar] [CrossRef]
- Yu, L.; Qu, J.; Gao, F.; Tian, Y. A Novel Hierarchical Algorithm for Bearing Fault Diagnosis Based on Stacked LSTM. Shock Vib. 2019, 2019, 2756284. [Google Scholar] [CrossRef]
- Spyridon, P.; Boutalis, Y.S. Fault detection and identification of rolling element bearings with Attentive Dense CNN. Neurocomputing 2020, 405, 208–217. [Google Scholar] [CrossRef]
- Chen, X.; Zhang, B.; Gao, D. Bearing fault diagnosis base on multi-scale CNN and LSTM model. J. Intell. Manuf. 2020, 32, 971–987. [Google Scholar] [CrossRef]
- Min, X.; Teng, L.; Lin, X.; Liu, L.; Silva, C. Fault Diagnosis for Rotating Machinery Using Multiple Sensors and Convolutional Neural Networks. IEEE/ASME Trans. Mechatron. 2017, 23, 101–110. [Google Scholar] [CrossRef]
- Hoang, D.T.; Kang, H.J. Deep Belief Network and Dempster-Shafer Evidence Theory for Bearing Fault Diagnosis. In Proceedings of the 2018 IEEE 27th International Symposium on Industrial Electronics (ISIE), Cairns, QLD, Australia, 13–15 June 2018. [Google Scholar] [CrossRef]
- Shao, H.; Jiang, H.; Wang, F.; Wang, Y. Rolling bearing fault diagnosis using adaptive deep belief network with dual-tree complex wavelet packet. ISA Trans. 2017, 69, 187–201. [Google Scholar] [CrossRef] [PubMed]
- Han, T.; Tian, Z.X.; Yin, Z.; Tan, A. Bearing fault identification based on convolutional neural network by different input modes. J. Braz. Soc. Mech. Sci. Eng. 2020, 42, 1–10. [Google Scholar] [CrossRef]
- Toma, R.N.; Kim, C.H.; Kim, J.M. Bearing Fault Classification Using Ensemble Empirical Mode Decomposition and Convolutional Neural Network. Electronics 2021, 10, 1248. [Google Scholar] [CrossRef]
- Case Western Reserve University Bearing Data Center Website. Available online: http://csegroups.case.edu/bearingdatacenter/home (accessed on 15 July 2021).








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Fault Type | Injury Diameters (Inch) | Sample Number | Label |
|---|---|---|---|
| Normal | 0 | 1000 | 0 |
| B007 | 0.007 | 1000 | 1 |
| B014 | 0.014 | 1000 | 2 |
| B021 | 0.021 | 1000 | 3 |
| IR007 | 0.007 | 1000 | 4 |
| IR014 | 0.014 | 1000 | 5 |
| IR021 | 0.021 | 1000 | 6 |
| OR007 | 0.007 | 1000 | 7 |
| OR014 | 0.014 | 1000 | 8 |
| OR021 | 0.021 | 1000 | 9 |
| Approximate/Detail Signals | D1 | D2 | D3 | D4 | D5 | A5 |
|---|---|---|---|---|---|---|
| Frequency band | 3–6 kHz | 1.5–3 kHz | 0.75–1.5 kHz | 0.375–0.75 kHz | 0.1875–0.375 kHz | 0–0.1875 kHz |
| Test Accuracy | Sensor | Sensor 1 (12 kHZ) | Sensor 2 (48 kHZ) | Multi-Sensor |
|---|---|---|---|---|
| Load | ||||
| 0 HP | 99.70% | 98.30% | 99.00 ± 0.7% | |
| 1 HP | 92.40% | 90.60% | 91.00 ± 0.8% | |
| 2 HP | 93.10% | 96.3% | 94.00 ± 0.7% | |
| 3 HP | 99.90% | 93.60% | 99.90 ± 0.2% | |
| Load Condition | Sensor Type | Algorithm | Test Accuracy | Train Time(s) | Test Loss |
|---|---|---|---|---|---|
| Multi-sensor | DWT-LSTM | 93.30% | 527.8 | 0.1751 | |
| LSTM | 91.79% | 518.1 | 0.2141 | ||
| Sensor 1 | 1DCNN | 83.99% | 13.5 | 0.4446 | |
| 2 HP | (12 kHz) | Bi-LSTM | 93.50% | 1741.2 | 0.2539 |
| RNN | 91.39% | 125.9 | 0.2141 | ||
| GRU | 91.79% | 793.0 | 0.2747 | ||
| Multi-sensor | DWT-LSTM | 99.00% | 520.8 | 0.0523 | |
| LSTM | 82.89% | 508.4 | 0.5020 | ||
| Sensor 2 | 1DCNN | 79.10% | 12.5 | 0.7239 | |
| 0 HP | (48 kHz) | Bi-LSTM | 97.09% | 1735.1 | 0.0631 |
| RNN | 86.59% | 129.8 | 0.3913 | ||
| GRU | 94.80% | 776.9 | 0.1350 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gu, K.; Zhang, Y.; Liu, X.; Li, H.; Ren, M. DWT-LSTM-Based Fault Diagnosis of Rolling Bearings with Multi-Sensors. Electronics 2021, 10, 2076. https://doi.org/10.3390/electronics10172076
Gu K, Zhang Y, Liu X, Li H, Ren M. DWT-LSTM-Based Fault Diagnosis of Rolling Bearings with Multi-Sensors. Electronics. 2021; 10(17):2076. https://doi.org/10.3390/electronics10172076
Chicago/Turabian StyleGu, Kai, Yu Zhang, Xiaobo Liu, Heng Li, and Mifeng Ren. 2021. "DWT-LSTM-Based Fault Diagnosis of Rolling Bearings with Multi-Sensors" Electronics 10, no. 17: 2076. https://doi.org/10.3390/electronics10172076