1. Introduction
With the development and high efficiency requirements of communication engineering, control science, industrial automation and computer technology, networked control systems (NCSs) have been gaining more attention and much research interest in recent years. NCSs are widely used within many areas, such as public transportation, military defense, health care, etc. [
1]. A NCS often contains a huge communication network, where sensors and actuators are linked together, and components in the communication network transmit their updates to a fusion center. Such a communication network makes a NCS work more efficiently. Due to NCSs’ high efficiency in industrial engineering, they have been widely studied and explored in practice, but there are still many challenges to be solved in the system design of NCSs.
One challenge is the estimation problem of NCSs. Since state estimation is completed in a fusion center by using sensor data transmitted over communication networks, it leads to a high cost. Moreover, a NCS often adopts remote sensors and actuators, making the system transmission more efficient.
Previous results on event-based estimation have two lines. One line focuses on the design of optimal-triggering policies. The optimal event-based sensor transmission scheduling problem of a scalar system was studied in [
2] with a finite horizon; the result was extended to a vector system in [
3], which significantly reduced the communication cost. For the distributed estimation problem, Weimer and James in [
4] proposed a distributed event-triggered estimation algorithm. A model-based adaptive event-triggered control scheme was also presented in [
5] for a class of uncertain single-input and single-output nonlinear continuous-time systems. Unlike the above results, adopting a deterministic event-based schedule, in [
6], an optimal stochastic event-triggered estimation policy was studied, and the results were extended to a multi-sensors case in [
7]. Furthermore, an optimal event-triggered tracking control scheme was also proposed for completely unknown nonlinear systems under the adaptive dynamic programming (ADP) framework in [
8]. For more research in this line, see also [
9,
10,
11]. In this field, researchers mainly study for an optimal event-triggered policy, which may not run for an optimal estimation.
In addition to the optimal event policy, another line is to find the optimal estimation for a given event-triggered schedule; many relevant studies have been carried out recently. A stochastic state estimator, which is suitable for event-sampling strategies, was designed in [
12] without energy constraints. However, considering the fact that sensors are usually with energy constraints in practical cases, an event-triggered estimation with energy constraints was probed in [
13], based on hidden Markov models. When sensors can harvest energy to overcome energy constraints, Huang et al. applied an event-triggered estimator to NCSs in [
14]. The problem of real-time reachable set control for a class of singular Markov jump networked cascade systems with time-delay, disturbance and non-zero initial conditions, was considered in [
15]. For subsequent results of similar studies, see also [
16,
17,
18]. Although an optimal estimation can be found in this way, an event-triggered approach also needs to be studied for a better transmission effect.
In this work, the policy of an event-triggered system is studied to trade off between the transmission cost and communication quality, and we find the system can improve the estimation effect when the event is not triggered. The main contributions of this paper are summarized as follows:
A periodic event-triggered transmitting policy is discussed to innovatively handle the specific relationship between the communication cost and effect.
The transmission effect is also compared under different triggering probabilities. When the transmission rate is improved, the error covariances of the estimates are decreased. A fair comparative study is also presented to demonstrate the necessity of considering a periodic transmitting policy in reality.
We organized the rest of this paper as follows: the problem formulation and the system modal shown in
Figure 1 are presented in
Section 2, with the description of the local sensor and remote state estimate.
Section 3 presents the expression of the MMSE estimate, and studies the relationship between the transmission cost and efficiency with a periodic event-triggered policy.
Section 4 provides some specific simulation results. The concluding remarks are given at the end.
Notations: Let denote the set of all integers, and the positive integers. and are the sets of positive semi-definite and positive definite matrices. For example, when , we write (, if ). Similarly, if , we obtain . is the set of real numbers, and the n-dimensional Euclidean space. stands for the trace of a matrix. refers to the probability of a random event. represents the expectation of a random event, and is the determinant of a matrix. ⋀ denotes taking the larger value. For functions with appropriate domains, is the composite function , and , with , where .
3. Online Sensor Schedule
In this section, a further discussion about the online sensor schedule is carried out. We show the MMSE estimate of the state at each time k, investigate the upper and lower bounds of no transmission probability, and adopt a periodic communication strategy, which can trade off between the cost and efficiency of the system.
3.1. MMSE Estimation
In the following lemma,
in (
15) is used to illustrate a computation method. Without loss of generality, if the communication is absent at time
k, the conditional distribution of
still keeps its Gaussianity, which is elementary for calculating the MMSE estimate and the corresponding estimation error covariance.
Lemma 1. Let represent a probability density. Whenever the transmission is successful, the conditional distribution of keeps the Gaussianity as given , i.e.,
where
is calculated by the recursive equations as follows:
with initial value
.
Proof of Lemma 1. The proofs are straightforward from Lemma 1. We define
. Evidently, from (
19), we have
. As a result, the lemma can be readily set up from [
22]. □
Furthermore, some properties of the incremental innovative information are critical for the proof of Lemma 1, which are also indicated in the following lemmas. , like the Fisher information matrix shown in Lemma 1, stands for the side state information.
Lemma 2. If the transmission is absent, the probability is shown as follows: Lemma 3. The following statements on hold: (a). is zero-mean Gaussian with (b). The sequence of , i.e., are independent.
Proof of Lemma 2 and Lemma 3. At first, theoretical proofs are given for the Gaussianity of
. For
, we have
and
by Lemma 3, where
. Assume
and define
. Regarding to the Lebesgue measure on
, we obtain the following:
The probability
can be computed as follows:
which completes the proof of Lemma 2.
On the one hand, if
, the equation of probability density is shown as follows:
that is,
Because of
shown in Lemma 3, we obtain the following:
where
.
On the other hand, if , is transmitted to the estimator successfully. Conditioned on , can be calculated by . For , we have .
From the optimal filtering theory, is orthogonal to . Since and are jointly Gaussian and , which reaches the conclusion. □
Then, two theorems are put forward in the following discussions to explain that remote estimators compute their own estimate and the covariance of the corresponding estimation error recursively, under schedule . An efficient but simple recursion comes from the Gaussianity of the a posteriori distribution.
Before introducing two theorems, we recall that and are updated at the sensor side locally, by using a standard Kalman filter. We define the MMSE estimator as .
Theorem 1. Consider given in (15). The value of in two different cases is studied, i.e.,
with
. Under this schedule, a positive semi-definite matrix for a concise notation can be denoted as follows:
Then,
is computed according to (
22), (
23) and (
28).
Proof of Theorem 1. Theorem 1 can be directly obtained from Lemma 1 and Lemma 3. □
Theorem 2. According to the MMSE estimator considered in Theorem 1 and given in (15). We can calculate the estimator’s estimation error covariance as follows: Proof of Theorem 2. The proof of Theorem 2 is readily from Lemma 1 and Lemma 3 and, thus, is omitted. □
The above two theorems describe that, if , is updated as ; when , stands for the remote estimator’s lost performance since the communication is absent. In fact, denotes the estimation error of the sensor’s local Kalman filter, as is shown in Theorem 2, and is simply a sum of . Compared with open-loop predictions, in can be interpreted as supplementary information, obtained from the absence of transmission. By using this method, if the local sensor satisfies the capability of running a Kalman filter, the remote estimator updates its estimate at each time k, and gains the associated estimation error covariance in a simple and efficient way.
3.2. The Bounds of the Probability of No Transmission
In order to study the property of communication schedules, we further explore the transmission probability. Since it is difficult to find the exact value of the probability , we try to obtain its upper and lower bounds.
Theorem 3. The upper bound and lower bound of can be calculated as follows: Before proving the Theorem 3, Lemma 4 and Lemma 5 are given as follows.
Lemma 4. When , , s.t. ,
Lemma 5. Assume , , where is the eigenvalue of P, we have the following: Proof of Theorem 3. Consider
given in (
23). We have the following:
For the first inequality given in (
30),
, assuming
, we have the following:
Then, because of
, it is not hard to obtain the following:
which completes the proof. □
3.3. Periodic Sending Strategy
Since the probability of communication is not an exact value, we try to explore a schedule to better compromise the system cost and efficiency by constraining the probability and study the transmission process.
Consider the MMSE estimator
, which is given in Theorem 1, and the corresponding estimation error covariance
given in Theorem 2. We introduce another operator
g:
to facilitate the discussion:
Denote the set of during a period as , in order to describe the transmission situation at different moments.
Remark 1. At time k, when in (18), an iterative calculation is required. For example, if , is denoted as , and if , with . The worst case is that the information is only sent once as , in one period, with . It is not difficult to see that when
is determined, the probability of transmission is related to the variance of
, which is defined as
. Assuming
is set, we introduce an operator
, then we have the following:
Theorem 4. Let , . According to (33), a Markov matrix, as follows, can describe the transmission probability:, where
is the transmission probability during a period
T.
Proof of Theorem 4. When
is fixed, the transmission probability
in a period can be calculated as follows:
For
in (
34), multiply
, we obtain the following:
It can be concluded that is . □
We further compare the transmission probabilities with different .
Lemma 6. Given in (15), it follows that we have the following:
where
stands for the transmission probability during a period
T with
.
Proof of Lemma 6. If
, let
, then
, we have the following:
Because of
, we have the following:
so
Similarly, for
,
,
, s.t.
, that is
. For
in (
33), it is trivial that
and
with
. The Lemma can be concluded. □
Lemma 6 shows that the transmission probability varies with different s within one period. Specifically, it becomes smaller when increases, reducing the communication cost and improving the transmission quality of the system at the same time, which deserves to be used in the design of event-triggered systems.
4. Simulation Examples
It is important to have accurate and efficient communication models of the data transmission networks for the design of event-triggered wireless control systems. Yi et al. proposed an event-triggered consensus protocol and a triggering law in [
23], which do not require any a priori knowledge of global network parameters. The Markov decision process and Markov game frameworks were also studied to investigate the optimal transmission strategies for the sensors in [
24], developing several structural results on the optimal solutions.
In order to illustrate the estimation quality with bounded states, a stable system is simulated as follows:
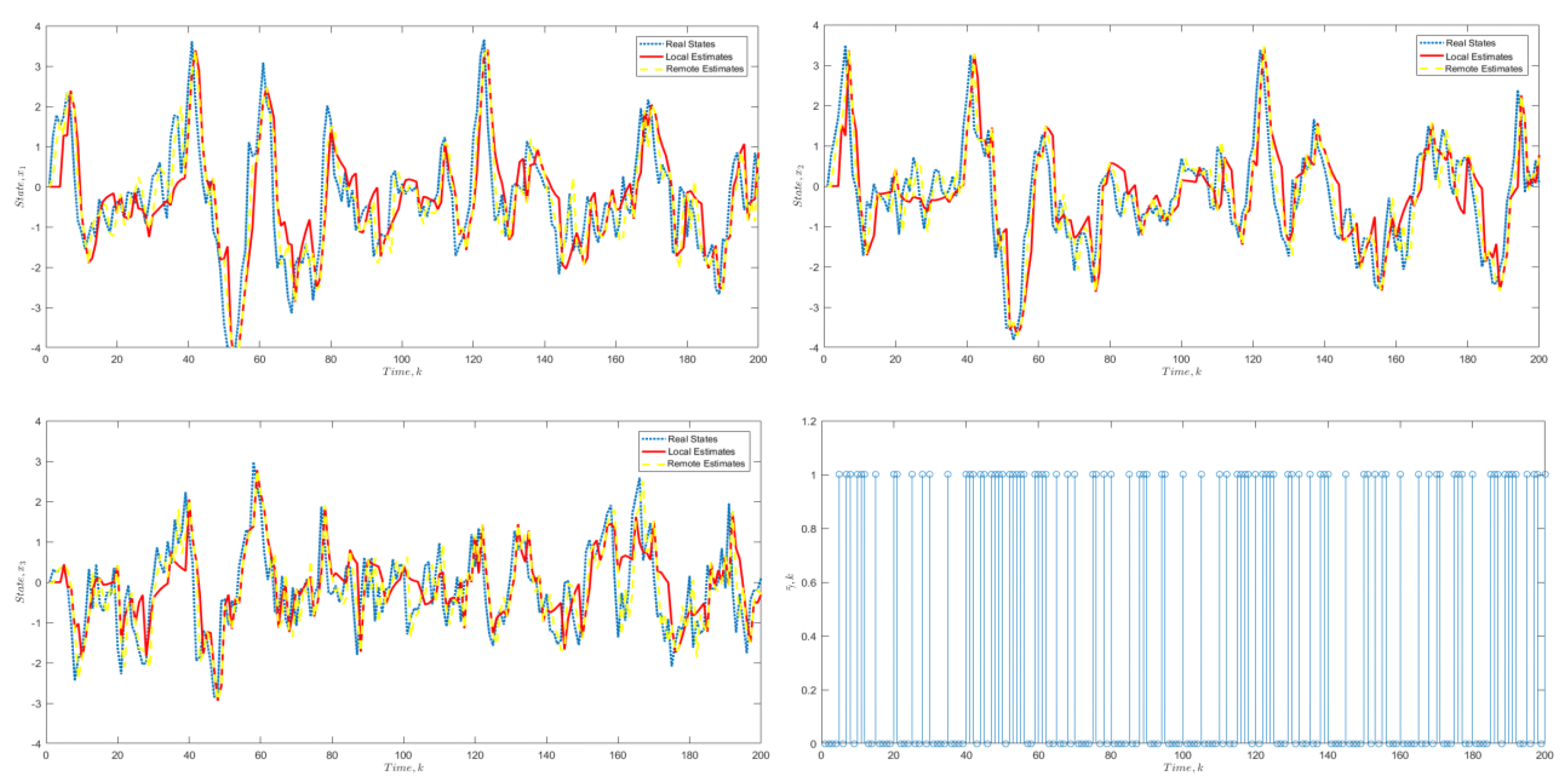
The error covariances of real states, remote and local estimates are calculated with a finite time-horizon T. We first set and , observing the implementing results and communication times.
Under
, the local estimates, remote estimates and real states are approximately the same, as the transmission rate is about 0.45, shown in
Figure 2.
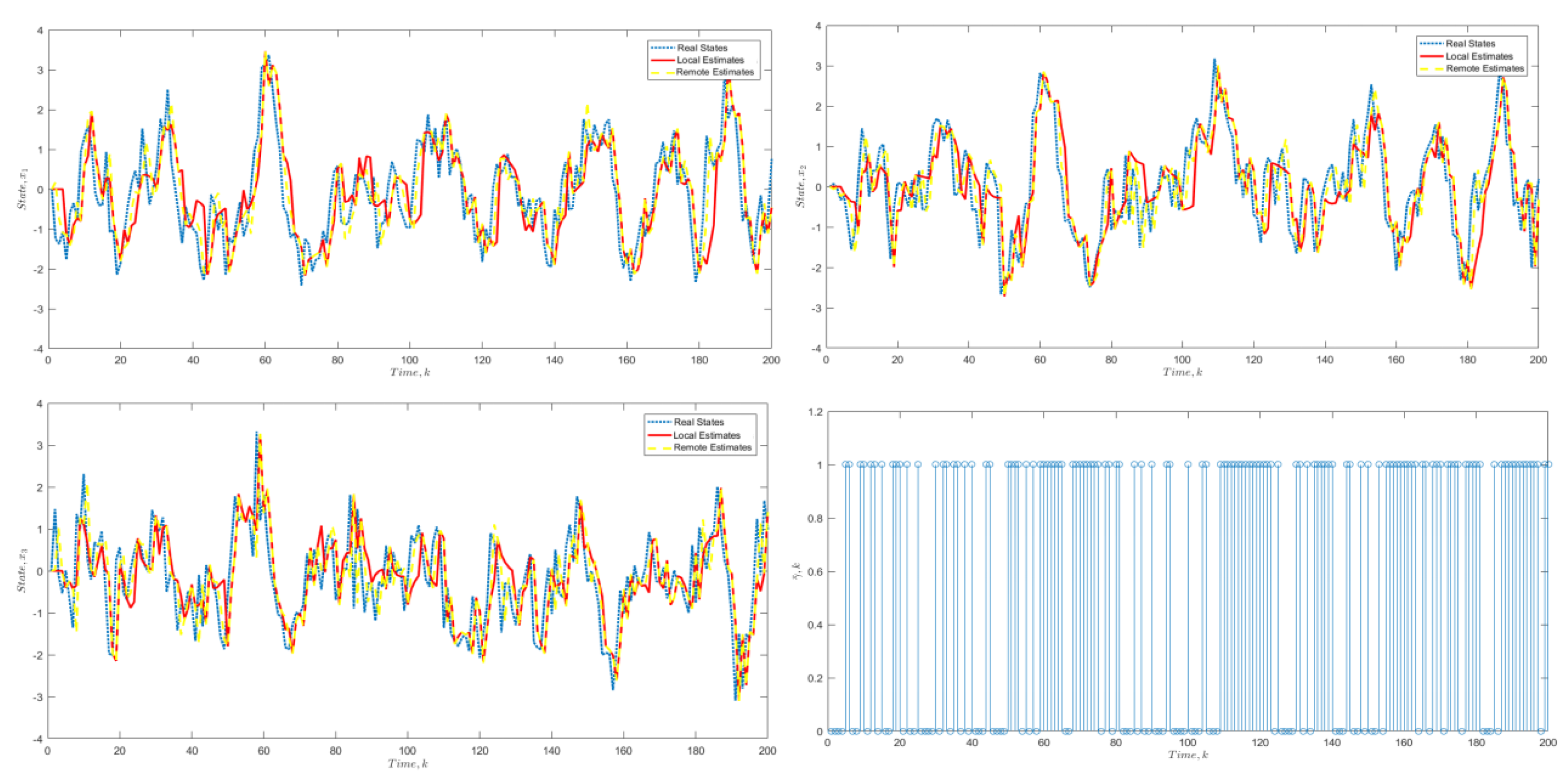
Under
, the transmission rate is improved to about 0.55, shown in
Figure 3, changing between 0.4 and 0.6 generally.
Looking at the figures above, it can be concluded that although the probability of transmission is changed by , there are few impacts on the state estimation. The local estimates, remote estimates and real states are still roughly the same, as the three different lines in each figure are basically coincident.
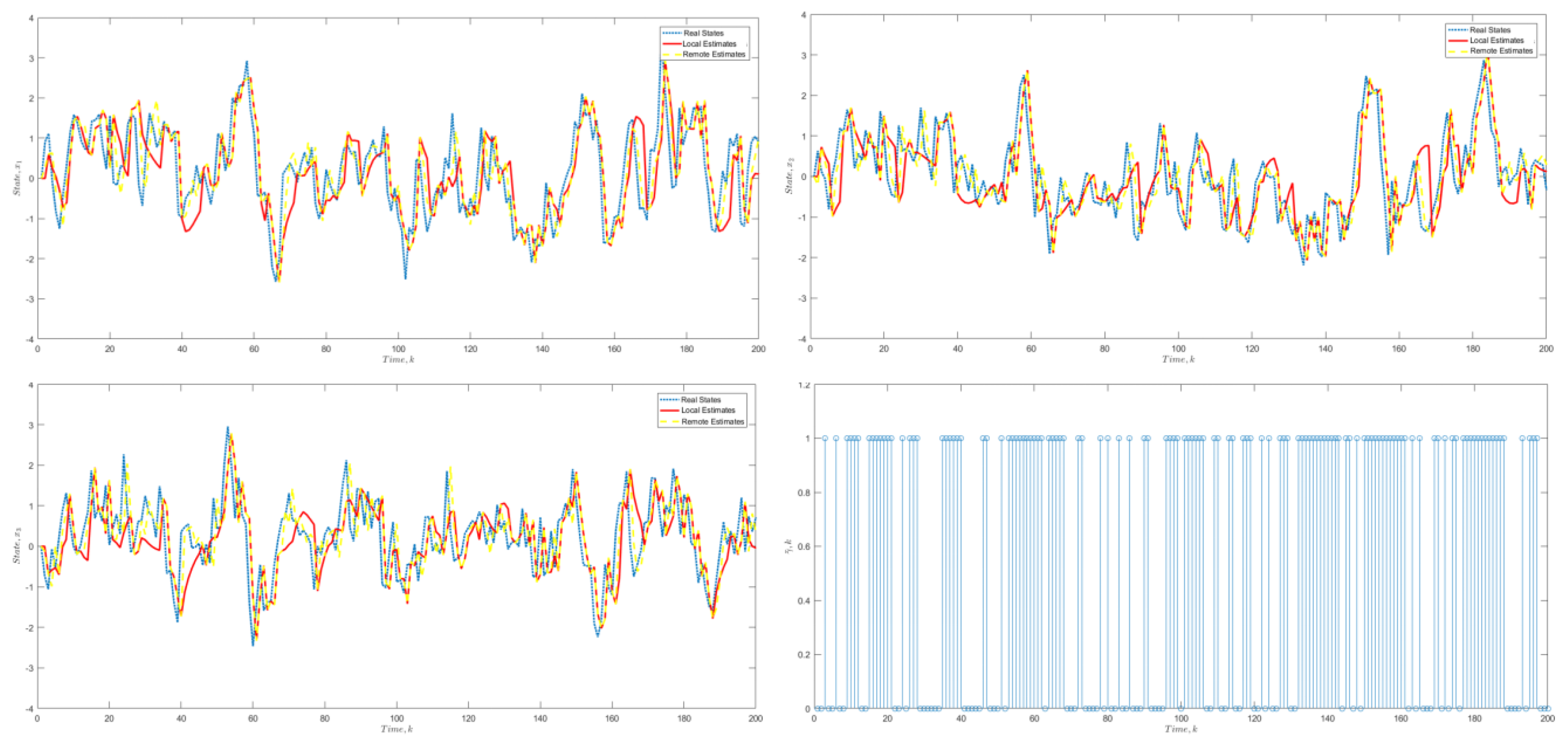
We then carry out a fair comparative study with an existing method, considering a case without the periodic transmission schedule. By changing a suitable
, we try to set the transmission rate to about 0.59, shown in
Figure 4.
The error covariances of the basic simulations and the comparative study are calculated and shown in
Table 1, with the above results.
To better test the differences between the two cases, we compare the error covariances in different situations. According to the basic simulations, the error covariances will decrease with a slightly higher transmission rate if the increases. The error covariances for the comparative study without the periodic transmission schedule are better than our basic simulations, theoretically, while the event-triggered policy with the periodic communication schedule can guarantee the transmission rate in the system to avoid extreme situations in reality. The innovative periodic transmission schedule in this study helps the system develop the communication quality to a certain extent.








{kind=link}
{kind=link}
{kind=link}
{kind=link}