
Object Classification with Roadside LiDAR Data Using a Probabilistic Neural Network

 ,
,
Abstract
:1. Introduction
2. Related Work
3. Data Processing and Feature Selection
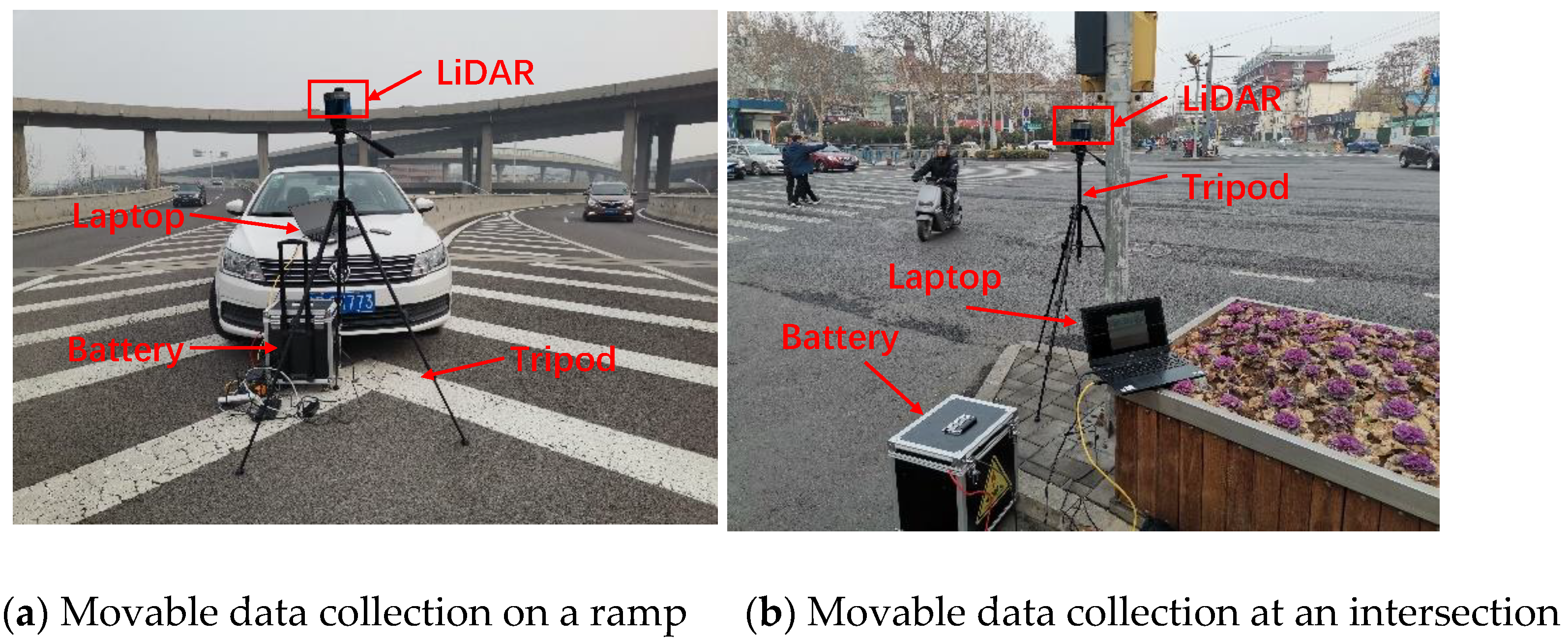
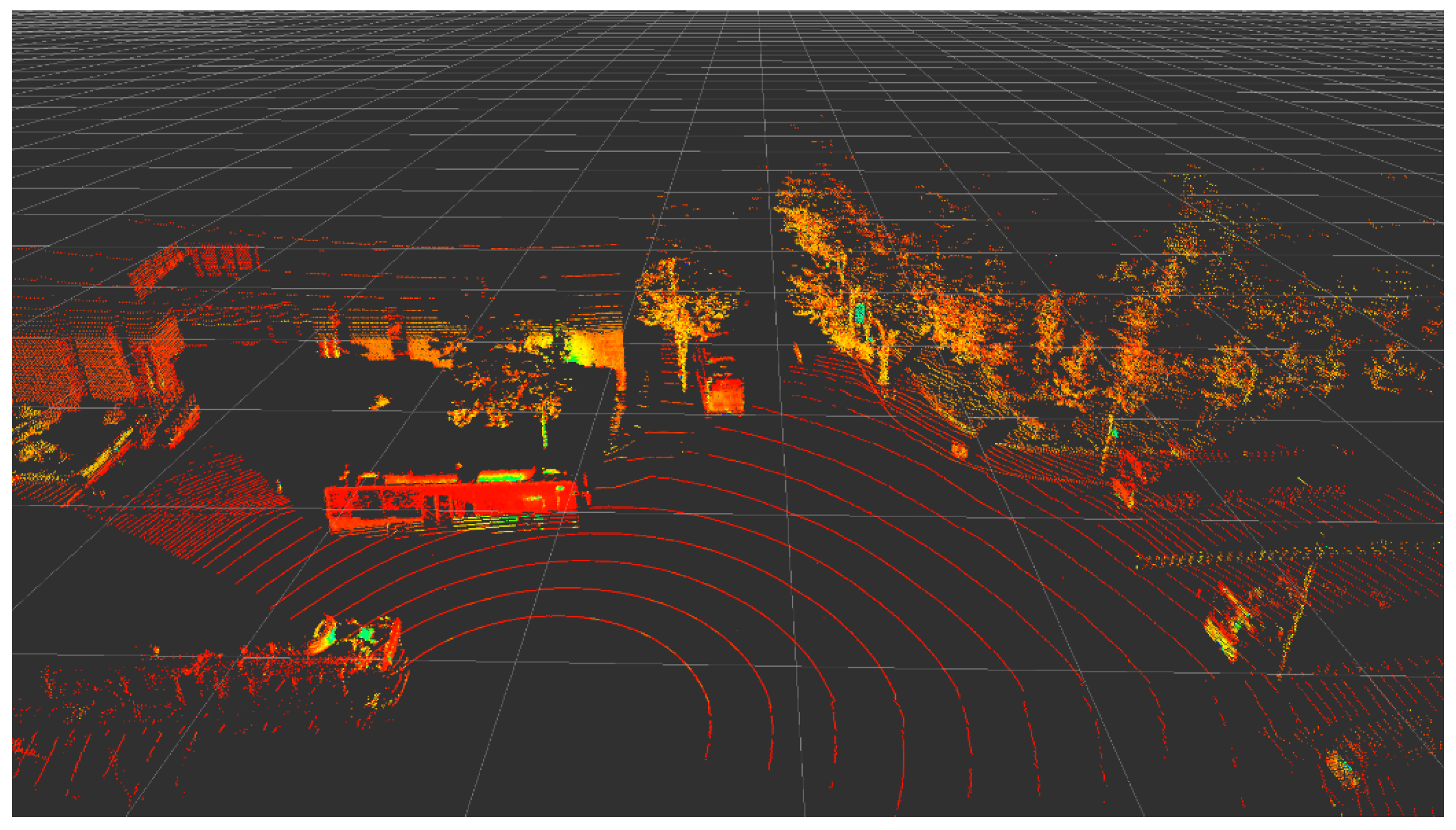
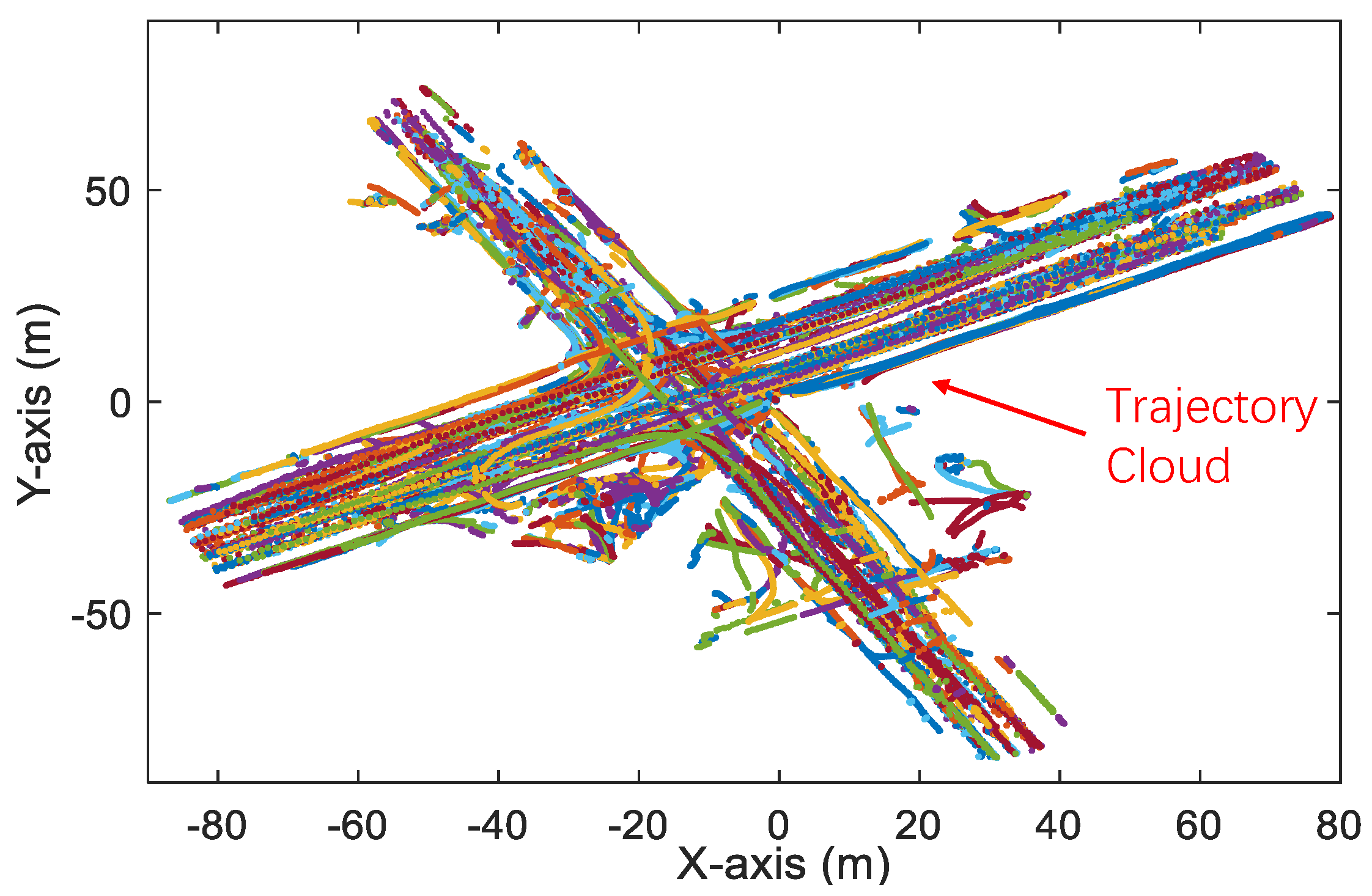
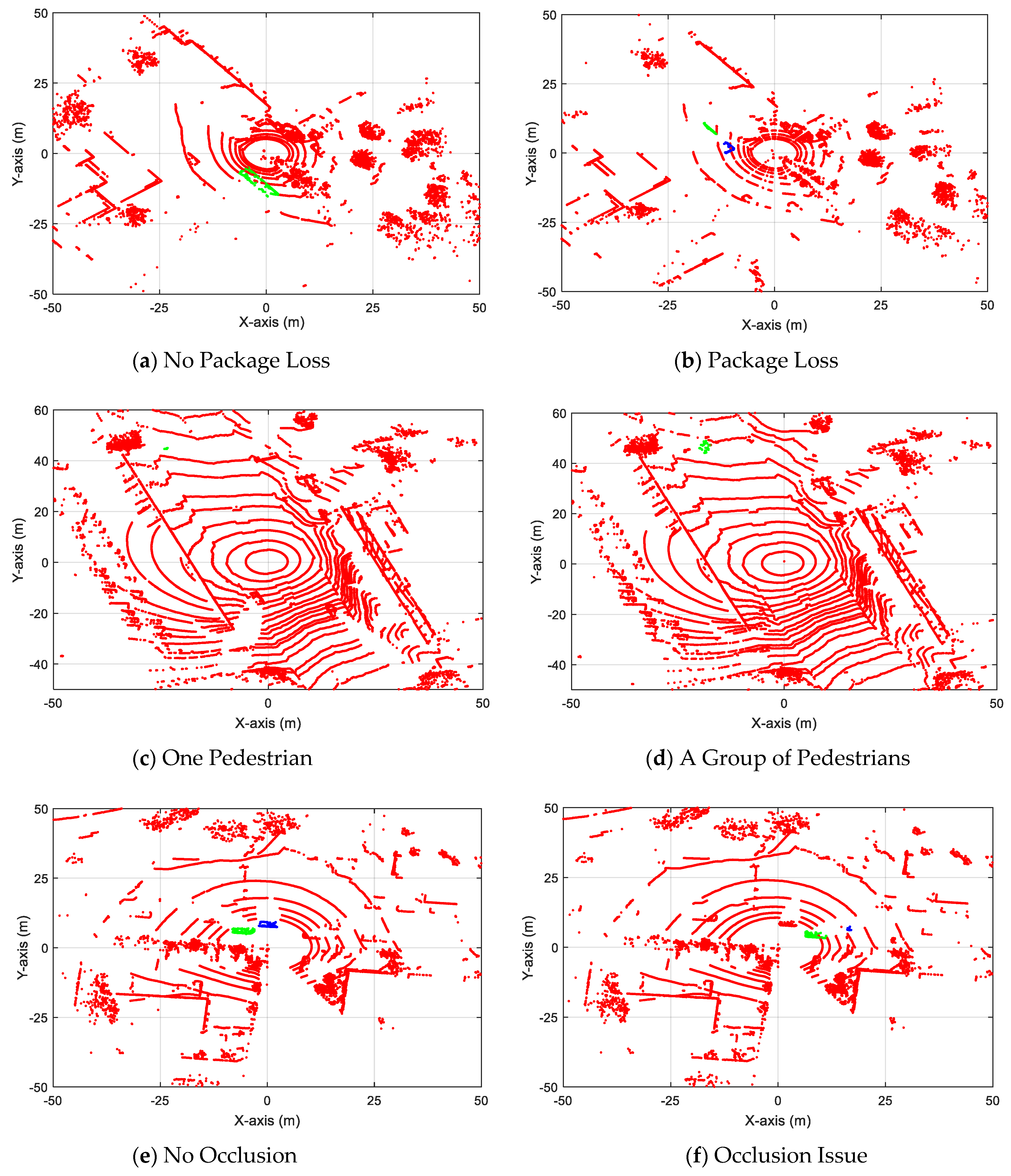
3.1. LiDAR Data Processing
3.2. Feature Selection
- Number of points (NP). NP represents the number of LiDAR points in one object. NP can be easily obtained in the trajectory (from the point cloud package in Table 2).
- Max intensity change (MIC). MIC represents the difference between the max intensity of one point and the min intensity of one point in the point cloud package representing one object. MIC can be calculated bywhere i and j are LiDAR points in the point cloud package (P). i and j can represent the same point (i = j). Max Ini and Min Ini mean the max intensity of point i and the min intensity of point i, respectively.
- Distance between tracking point and LiDAR (D). D represents the nearest distance between the point cloud package and the roadside LiDAR. D can be calculated aswhere Tx, Ty, and Tz are the XYZ values of coordinate of the tracking point. It is assumed that the LiDAR reports its location as (0, 0, 0).
- Max distance in the XY plane (MDXY). MDXY represents the max distance between two points in the point cloud package in the XY plane. MDXX can be denoted aswhere m and n are any two points in the point cloud package (P) and m ≠ n. MDXX does not consider the value in the Z-axis.
- Max distance in Z-axis (MDZ). MDZ represents the max distance between two points in the point cloud package in the Z-axis. MDZ can be expressed aswhere i and j are any two points in the point cloud package (P). i and j can represent the same point (i = j). Zi is the Z-axis value of point i.
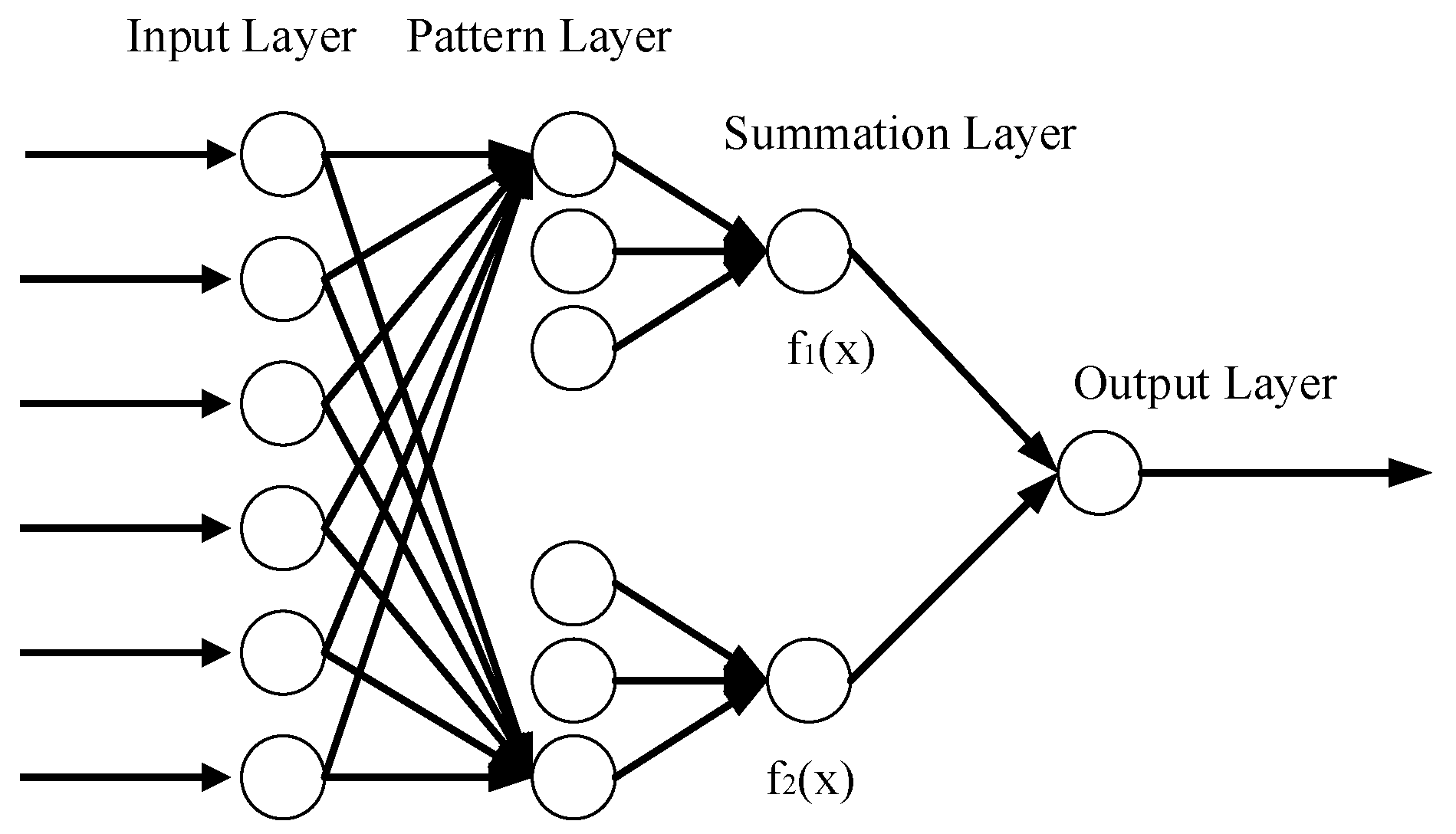
4. Probabilistic Neural Network (PNN)
5. PNN Training and Evaluation
5.1. Results of PNN
5.2. Results of PNN
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Wu, J.; Xu, H.; Zheng, Y.; Zhang, Y.; Lv, B.; Tian, Z. Automatic vehicle classification using roadside LiDAR data. Transp. Res. Rec. 2019, 2673, 153–164. [Google Scholar] [CrossRef]
- Wu, J.; Xu, H.; Zheng, Y.; Tian, Z. A novel method of vehicle-pedestrian near-crash identification with roadside LiDAR data. Accid. Anal. Prev. 2018, 121, 238–249. [Google Scholar] [CrossRef] [PubMed]
- Khan, M.A.; Kim, J. Toward Developing Efficient Conv-AE-Based Intrusion Detection System Using Heterogeneous Dataset. Electronics 2020, 9, 1771. [Google Scholar] [CrossRef]
- Zhao, J.; Xu, H.; Liu, H.; Wu, J.; Zheng, Y.; Wu, D. Detection and tracking of pedestrians and vehicles using roadside LiDAR sensors. Transp. Res. Part C Emerg. Technol. 2019, 100, 68–87. [Google Scholar] [CrossRef]
- Missoum, S. Controlling structure failure modes during an impact in the presence of uncertainties. Struct. Multidiscipl. Optim. 2007, 34, 463–472. [Google Scholar] [CrossRef]
- Wu, J.; Xu, H.; Sun, Y.; Zheng, J.; Yue, R. Automatic background filtering method for roadside LiDAR data. Transp. Res. Rec. 2018, 2672, 14–22. [Google Scholar] [CrossRef]
- Biljecki, F.; Ledoux, H.; Van Oosterom, P. Transportation mode-based segmentation and classification of movement trajectories. Int. J. Geogr. Inf. Sci. 2013, 27, 385–407. [Google Scholar] [CrossRef]
- Fuerstenberg, K.; Willhoeft, V. Object tracking and classification using laserscanners-pedestrian recognition in urban environment. In Proceeding of IEEE Intelligent Transportation Systems Conference, The Hague, The Netherlands, 6–9 October 2013; pp. 451–453. [Google Scholar]
- Gupte, S.; Masoud, O.; Papanikolopoulos, P. Vision-based vehicle classification. In Proceedings of the IEEE Intelligent Transportation Systems, Dearborn, MI, USA, 1–3 October 2000; pp. 46–51. [Google Scholar]
- Malinovskiy, Y.; Wu, Y.; Wang, Y. Video-based vehicle detection and tracking using spatiotemporal maps. Transp. Res. Rec. 2009, 2121, 81–89. [Google Scholar] [CrossRef] [Green Version]
- Zhang, G.; Avery, R.; Wang, Y. Video-based vehicle detection and classification system for real-time traffic data collection using uncalibrated video cameras. Transp. Res. Rec. 2007, 1993, 138–147. [Google Scholar] [CrossRef] [Green Version]
- Mithun, N.; Rashid, N.; Rahman, S. Detection and classification of vehicles from video using multiple time-spatial images. IEEE trans. Intell. Transp. Syst. 2012, 13, 1215–1225. [Google Scholar] [CrossRef]
- Chen, Z.; Ellis, T.; Velastin, S.A. Vehicle type categorization: A comparison of classification schemes. In Proceedings of the IEEE Intelligent Transportation Systems Conference, Washington, DC, USA, 5–7 October 2011; pp. 74–79. [Google Scholar]
- Zangenehpour, S.; Miranda-Moreno, L.; Saunier, N. Automated classification in traffic video at intersections with heavy pedestrian and bicycle traffic. In Proceedings of the TRB 93th Annual Meeting, Washington, DC, USA, 12–16 January 2014; pp. 492–509. [Google Scholar]
- Zangenehpour, S.; Miranda-Moreno, L.; Saunier, N. Automated classification based on video data at intersections with heavy pedestrian and bicycle traffic: Methodology and application. Transp. Res. Part C Emerg. Technol. 2015, 56, 161–176. [Google Scholar] [CrossRef]
- Liang, C.; Juang, C. Moving object classification using a combination of static appearance features and spatial and temporal entropy values of optical flows. IEEE trans. Intell. Transp. Syst. 2015, 16, 3453–3464. [Google Scholar] [CrossRef]
- Song, Y.; Zhang, H.; Liu, Y.; Liu, J.; Zhang, H.; Song, X. Background Filtering and Object Detection with a Stationary LiDAR Using a Layer-Based Method. IEEE Access 2020, 8, 184426–184436. [Google Scholar] [CrossRef]
- Lin, C.; Wang, K.; Wu, D.; Gong, B. Passenger Flow Prediction Based on Land Use around Metro Stations: A Case Study. Sustainability 2020, 12, 6844. [Google Scholar] [CrossRef]
- Lin, C.; Liu, H.; Wu, D.; Gong, B. Background Point Filtering of Low-Channel Infrastructure-Based LiDAR Data Using a Slice-Based Projection Filtering Algorithm. Sensors 2020, 20, 3054. [Google Scholar] [CrossRef] [PubMed]
- Cui, Y.; Xu, H.; Wu, J.; Sun, Y.; Zhao, J. Automatic vehicle tracking with roadside LiDAR data for the connected-vehicles system. IEEE Intell. Syst. 2019, 34, 44–51. [Google Scholar] [CrossRef]
- Khan, M.A.; Karim, M.; Kim, Y. Automatic vehicle tracking with roadside LiDAR data for the connected-vehicles system. Symmetry 2018, 10, 485. [Google Scholar] [CrossRef] [Green Version]
- Wu, J.; Xu, H.; Zhang, Y.; Tian, Y.; Song, X. Real-time queue length detection with roadside LiDAR data. Sensors 2020, 8, 2342. [Google Scholar] [CrossRef]
- Song, W.; Zhang, L.; Tian, Y.; Fong, S.; Liu, J.; Gozho, A. CNN-based 3D object classification using Hough space of LiDAR point clouds. Hum-cent. Comput. Inf. 2020, 10, 1–14. [Google Scholar] [CrossRef]
- Premebida, C.; Monteiro, G.; Nunes, U.; Peixoto, P. A lidar and vision-based approach for pedestrian and vehicle detection and tracking. In Proceedings of the IEEE Intelligent Transportation Systems Conference, Seattle, WA, USA, 30 September–3 October 2007; pp. 1044–1049. [Google Scholar]
- Lee, H.; Coifman, B. Side-fire lidar-based vehicle classification. Transp. Res. Rec. 2012, 2308, 173–183. [Google Scholar] [CrossRef]
- Zhang, F.; Clarke, D.; Knoll, A. Vehicle detection based on LiDAR and camera fusion. In Proceedings of the IEEE Intelligent Transportation Systems Conference, Qingdao, Shandong, China, 8–11 October 2014; pp. 1620–1625. [Google Scholar]
- Yao, W.; Hinz, S.; Stilla, U. Extraction and motion estimation of vehicles in single-pass airborne LiDAR data towards urban traffic analysis. ISPRS J. Photogramm. 2011, 66, 260–271. [Google Scholar] [CrossRef]
- Song, Y.; Tian, J.; Li, T.; Sun, R.; Zhang, H.; Wu, J.; Song, X. Road-Users Classification Utilizing Roadside Light Detection and Ranging Data. SAE Tech. Pap. 2020. 2020-01-5150. [Google Scholar] [CrossRef]
- Gao, H.; Cheng, B.; Wang, J.; Li, K.; Zhao, J.; Li, D. Object classification using CNN-based fusion of vision and LIDAR in autonomous vehicle environment. IEEE Trans. Ind. Electron. 2018, 14, 4224–4231. [Google Scholar] [CrossRef]
- Wang, H.; Wang, B.; Liu, B.; Meng, X.; Yang, G. Pedestrian recognition and tracking using 3D LiDAR for autonomous vehicle. Rob. Auton. Syst. 2017, 88, 71–78. [Google Scholar] [CrossRef]
- Wu, J. An automatic procedure for vehicle tracking with a roadside LiDAR sensor. Ite J. 2018, 88, 32–37. [Google Scholar]
- Liu, H.; Lin, C.; Wu, D.; Gong, B. Slice-Based Instance and Semantic Segmentation for Low-Channel Roadside LiDAR Data. Remote Sens. 2020, 12, 3830. [Google Scholar] [CrossRef]
- Song, X.; Wu, J.; Zhang, H.; Pi, R. Analysis of Crash Severity for Hazard Material Transportation Using Highway Safety Information System Data. SAGE Open 2020, 10, 2158244020939924. [Google Scholar] [CrossRef]
- Wu, J.; Song, X. Review on smart highways critical technology. Int. J. Eng. Sci. 2020, 50, 52–69. [Google Scholar]
- Wang, G.; Wu, J.; Xu, T.; Tian, B. 3D Vehicle Detection with RSU LiDAR for Autonomous Mine. IEEE Trans. Veh. Technol. 2021, 70, 344–355. [Google Scholar] [CrossRef]
- Wu, J.; Xu, H.; Tian, Y.; Pi, R.; Yue, R. Vehicle detection under adverse weather from roadside LIDAR Data. Sensor 2020, 20, 3433. [Google Scholar] [CrossRef]
- Gargoum, S.; El-Basyouny, K.; Sabbagh, J.; Froese, K. Automated highway sign extraction using lidar data. Transp. Res. Rec. 2017, 2643, 1–8. [Google Scholar] [CrossRef] [Green Version]
- Specht, D.F. Probabilistic neural networks. Neural Netw. 1990, 3, 109–118. [Google Scholar] [CrossRef]
- Specht, D.F. A general regression neural network. IEEE Trans. Neural Netw. 1991, 2, 568–576. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Abdulhai, B.; Ritchie, S.G. Enhancing the universality and transferability of freeway incident detection using a Bayesian-based neural network. Transp. Res. Part C Emerg. Technol. 1999, 7, 261–280. [Google Scholar] [CrossRef]
- Cacoullos, T. Estimation of a multivariate density. Ann. Inst. Stat. Math. 1966, 18, 179–189. [Google Scholar] [CrossRef]
- Oh, C.; Kang, Y.S.; Youn, Y.; Konosu, A. Development of probabilistic pedestrian fatality model for characterizing pedestrian-vehicle collisions. Int. J. Automot. Technol. 2008, 9, 191–196. [Google Scholar] [CrossRef]
- Chasset, P.O. Probabilistic Neural Network for the R Statistical Language. 2013. Available online: http://flow.chasset.net/pnn (accessed on 14 March 2021).
- Yue, R.; Xu, H.; Wu, J.; Sun, R.; Yuan, C. Data registration with ground points for roadside LiDAR sensor. Remote Sens. 2019, 11, 1354. [Google Scholar] [CrossRef] [Green Version]
- Wu, J.; Zhang, Y.; Tian, Y.; Yue, R.; Zhang, H. Automatic Vehicle Tracking with LiDAR-Enhanced Roadside Infrastructure. J. Test Eval. 2021, 49, 121–133. [Google Scholar] [CrossRef]
- Wu, J.; Xu, H.; Tian, Y.; Zhang, Y.; Zhao, J.; Lv, B. An automatic lane identification method for the roadside light detection and ranging sensor. J. Intell. Transp. Syst. 2020, 24, 467–479. [Google Scholar] [CrossRef]
- Lv, B.; Xu, H.; Wu, J.; Tian, Y.; Tian, S.; Feng, S. Revolution and rotation-based method for the roadside LiDAR data integration. Opt. Laser Technol. 2019, 119, 105571. [Google Scholar] [CrossRef]
- Glowacz, A. Fault diagnosis of electric impact drills using thermal imaging. Measurement 2021, 171, 108815. [Google Scholar] [CrossRef]
- Wu, J.; Xu, H.; Liu, W. Points Registration for Roadside LiDAR Sensors. Transp. Res. Rec. 2019, 2673, 627–639. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | Device | Database Size | |
|---|---|---|---|
| Zhao et al. [4] | BP-NN | Roadside LiDAR | 6800 |
| Cui et al. [20] | Random Forest | Roadside LiDAR | Not reported |
| Song et al. [28] | SVM | Roadside LiDAR | 1093 |
| Wang et al. [30] | SVM | On-board LiDAR | 12820 |
| This research | PNN | Roadside LiDAR | 2736 |
| Element Name | Description |
|---|---|
| Object ID | A unique ID for each object |
| Object Type | Different types of objects. To be provided by this study |
| Date | Recording the date |
| Timestamp | Recording the data logging time (hh:mm:ss) |
| Frame ID | Time index representing the relative time from the beginning of the data collection |
| Point Cloud Package (Multiple elements) | Storing the point information of each point in the object (XYZ information, intensity, direction (in a polar coordinate system, etc.) |
| Tracking-x | X value of coordinate of the tracking point |
| Tracking-y | Y value of coordinate of the tracking point |
| Tracking-z | Z value of coordinate of the tracking point |
| Speed | Object speed calculated based on the Global Nearest Neighbor (GNN) |
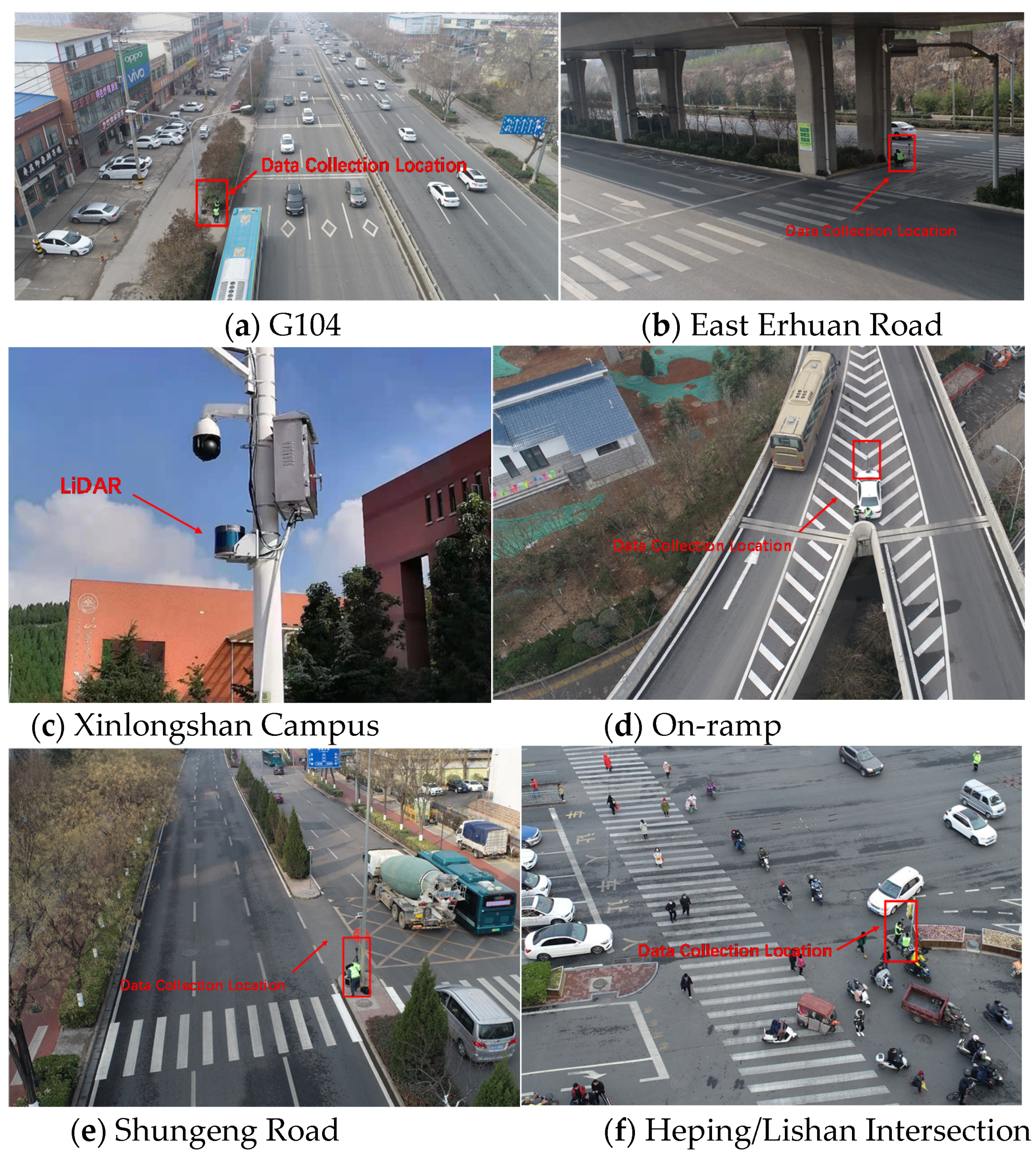
| Site | AADT | Facility Type | Number of Through Lanes per Direction |
|---|---|---|---|
| G104 national road | 9000 | Road segment | Four |
| East Erhuan road | 5000 | Crosswalk | Four |
| Xinlongshan campus of Shandong university | 300 | Road segment | One |
| On-ramp of around-city highway | 6000 | On-ramp | One |
| Shungeng road | 9200 | Crosswalk | Three |
| Heping/Lishan Intersection | 13800 | Intersection | Four |
| References | Selected Features | Applicability |
|---|---|---|
| Song et al. [18] | Object length, height profile, point number, distance, and difference between length and height. | Developed for vehicle classification with roadside LiDAR. Validated at 3 sites. |
| Lee and Coifman [25] | Object length and height profile. | Developed for vehicle classification with roadside LiDAR. Validated at 6 sites. |
| Liang and Juang [16] | Point number, distance, intensity, and the difference between length and height. | Developed for vehicle and pedestrian classification with roadside LiDAR. Validated at one site. |
| Yao et al. [27] | Elongatedness, planarity, vertical position, and vertical range. | Developed for vehicle and non-vehicle classification for airborne LiDAR. Validated at three sites. |
| Wang et al. [30] | Eigenvalue, eigenvector, histogram of two planes, and slice feature. | Developed for pedestrian and non-pedestrian classification using on-board LiDAR. Validated at two sites. |
| Fuerstenberg and Willhoeft [8] | Geometric data. | Developed for object classification using on-board LiDAR. Not validated. |
| Training Set | Validation Set | Testing Set | ||
|---|---|---|---|---|
| NR | Passenger Car | 996 | 426 | 453 |
| Pedestrians | 368 | 158 | 175 | |
| Bicycle | 44 | 18 | 17 | |
| Truck | 38 | 14 | 29 | |
| NI | Passenger Car | 996 | 418 | 442 |
| Pedestrians | 368 | 154 | 172 | |
| Bicycle | 44 | 18 | 17 | |
| Truck | 38 | 13 | 27 | |
| CA (%) | Passenger Car | 100 | 98.1 | 97.6 |
| Pedestrians | 100 | 96.8 | 98.3 | |
| Bicycle | 100 | 100 | 100 | |
| Truck | 100 | 92.9 | 93.1 |
| PNN | ||||
|---|---|---|---|---|
| Confusion Matrix | Bicycle | Pedestrian | Passenger Car | Truck |
| Bicycle | 17 | 0 | 0 | 0 |
| Pedestrian | 0 | 172 | 11 | 0 |
| Passenger Car | 0 | 3 | 442 | 2 |
| Truck | 0 | 0 | 0 | 27 |
| Overall CA (%) | 97.6 | |||
| SVM | ||||
| Confusion Matrix | Bicycle | Pedestrian | Passenger Car | Truck |
| Bicycle | 14 | 2 | 2 | 0 |
| Pedestrian | 3 | 167 | 17 | 0 |
| Passenger Car | 0 | 6 | 433 | 4 |
| Truck | 0 | 0 | 1 | 25 |
| Overall CA (%) | 94.8 | |||
| RF | ||||
| Confusion Matrix | Bicycle | Pedestrian | Passenger Car | Truck |
| Bicycle | 15 | 5 | 1 | 0 |
| Pedestrian | 2 | 162 | 14 | 0 |
| Passenger Car | 0 | 8 | 438 | 2 |
| Truck | 0 | 0 | 0 | 27 |
| Overall CA (%) | 95.3 | |||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, J.; Pi, R.; Ma, X.; Wu, J.; Li, H.; Yang, Z. Object Classification with Roadside LiDAR Data Using a Probabilistic Neural Network. Electronics 2021, 10, 803. https://doi.org/10.3390/electronics10070803
Zhang J, Pi R, Ma X, Wu J, Li H, Yang Z. Object Classification with Roadside LiDAR Data Using a Probabilistic Neural Network. Electronics. 2021; 10(7):803. https://doi.org/10.3390/electronics10070803
Chicago/Turabian StyleZhang, Jiancheng, Rendong Pi, Xiaohong Ma, Jianqing Wu, Hongtao Li, and Ziliang Yang. 2021. "Object Classification with Roadside LiDAR Data Using a Probabilistic Neural Network" Electronics 10, no. 7: 803. https://doi.org/10.3390/electronics10070803
APA StyleZhang, J., Pi, R., Ma, X., Wu, J., Li, H., & Yang, Z. (2021). Object Classification with Roadside LiDAR Data Using a Probabilistic Neural Network. Electronics, 10(7), 803. https://doi.org/10.3390/electronics10070803