
Research on Control Strategy of Isolated DC Microgrid Based on SOC of Energy Storage System


Abstract
:1. Introduction
2. Control Strategy of BESS
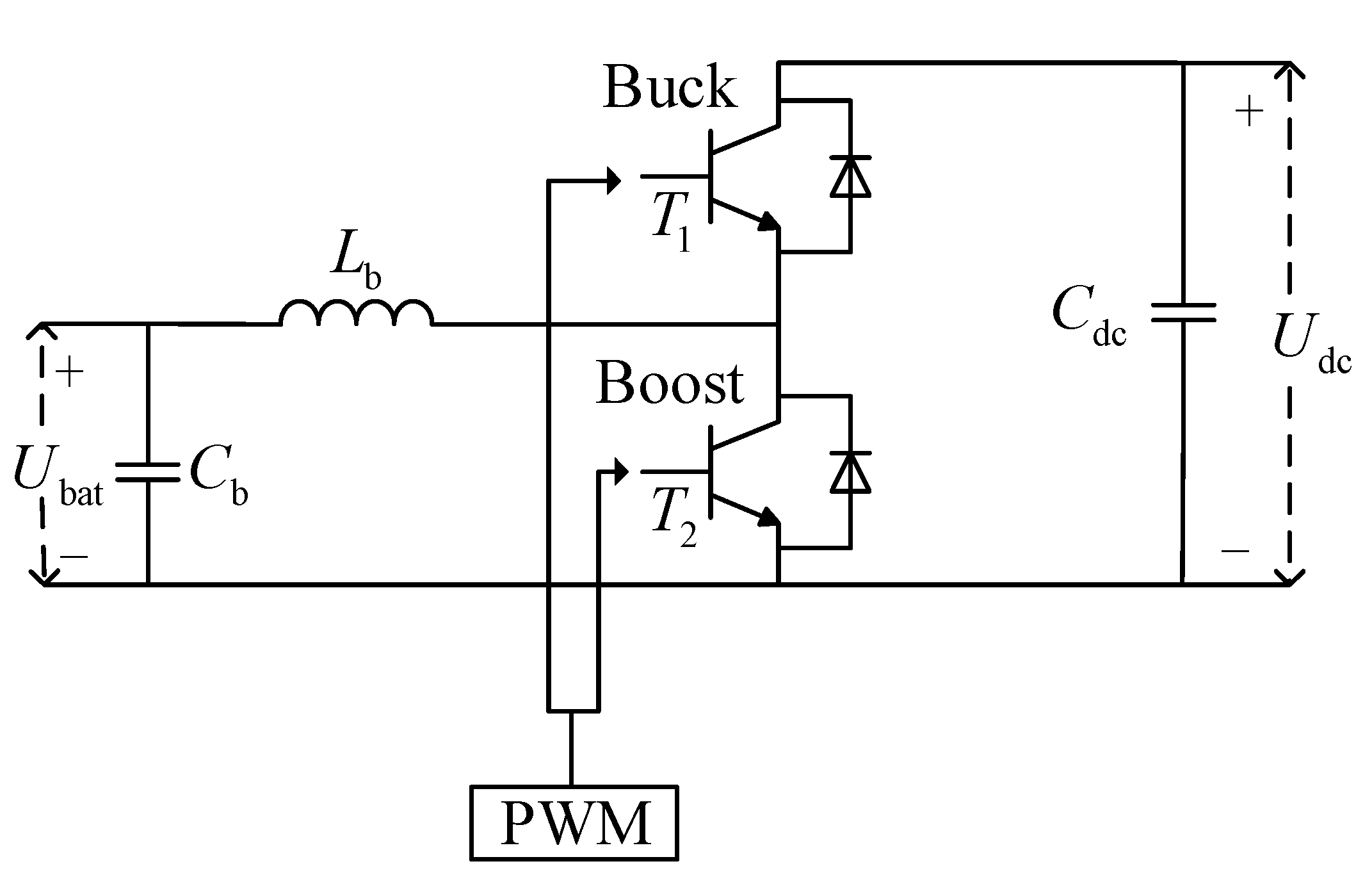
2.1. BESS’s Interface Converter
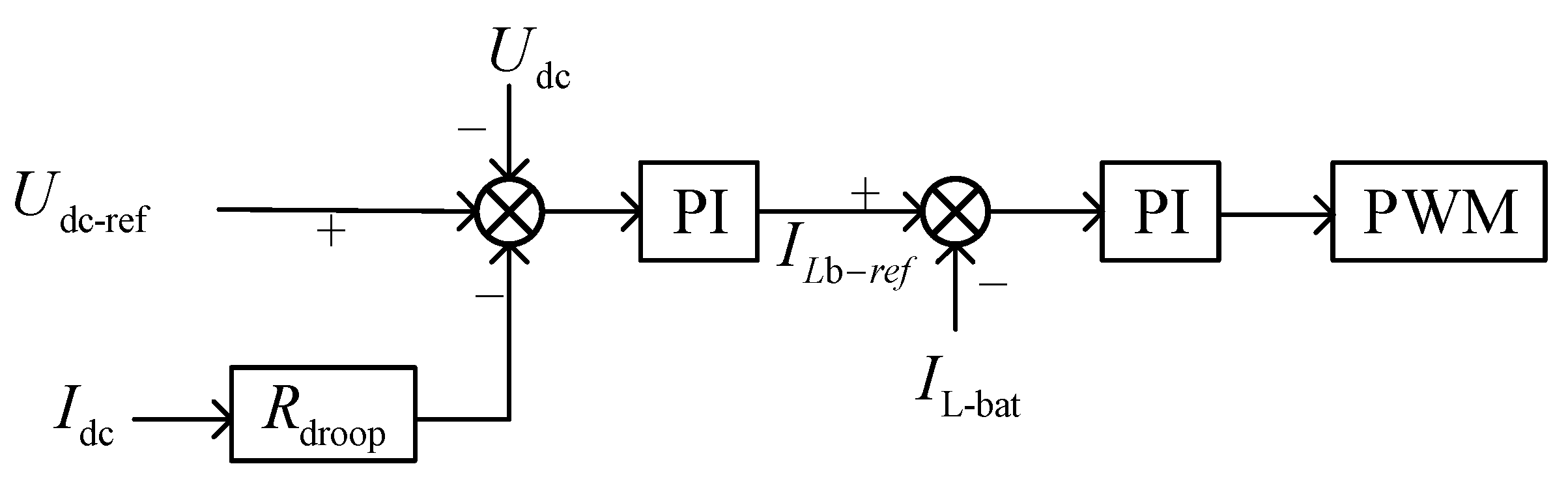
2.2. Traditional ESS’s Control Strategy
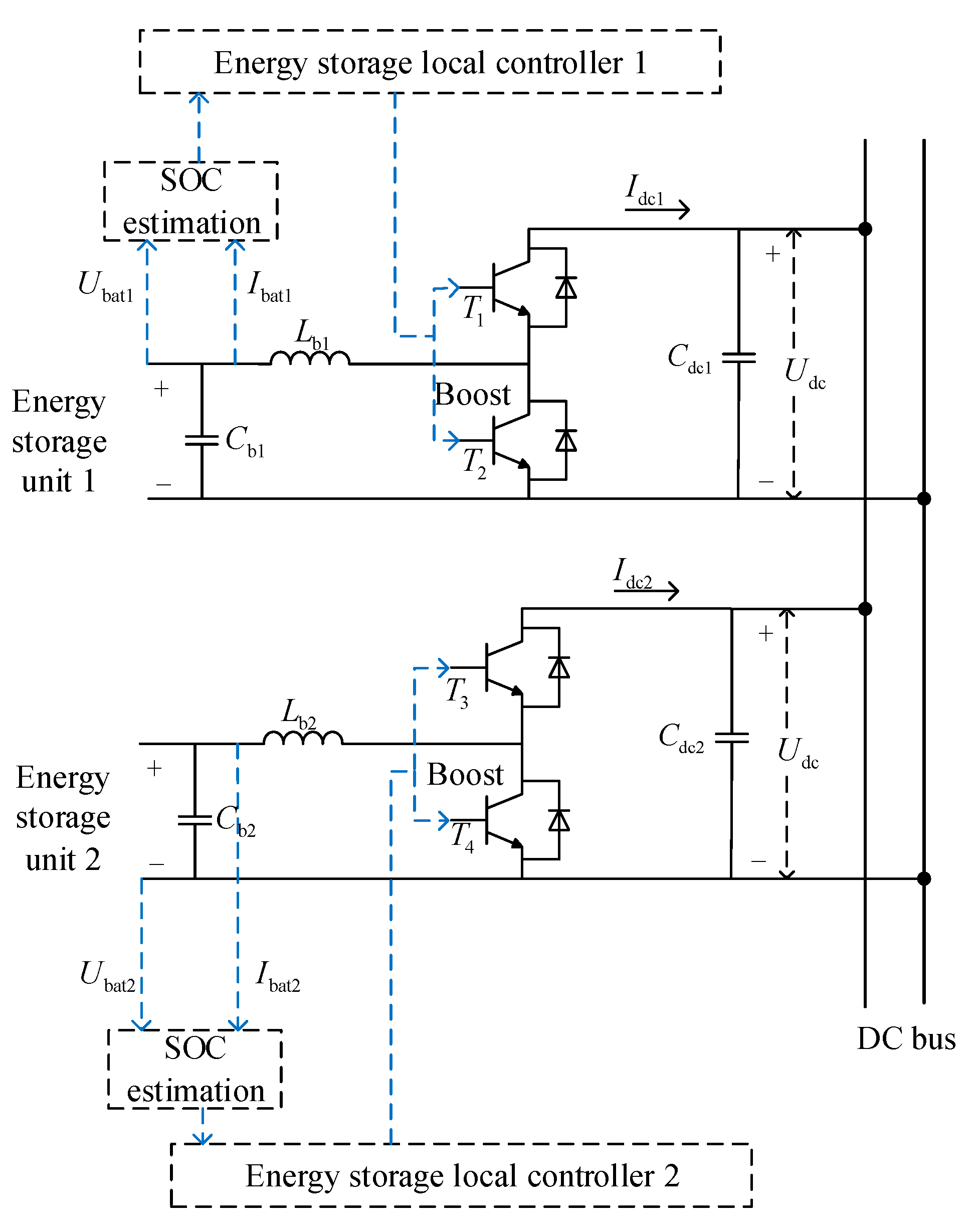
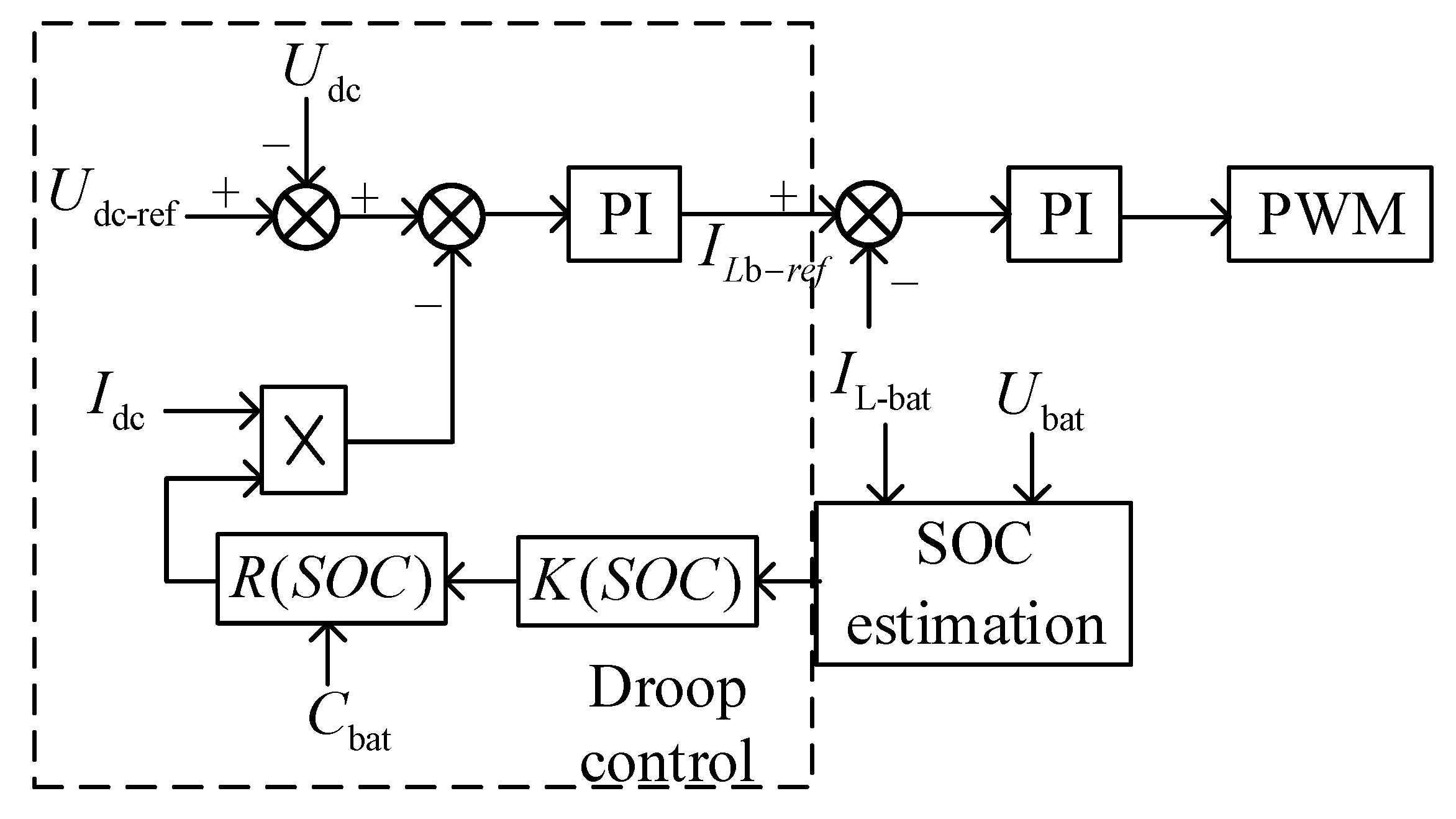
2.3. Balance Control Strategy of ESS Based on SOC
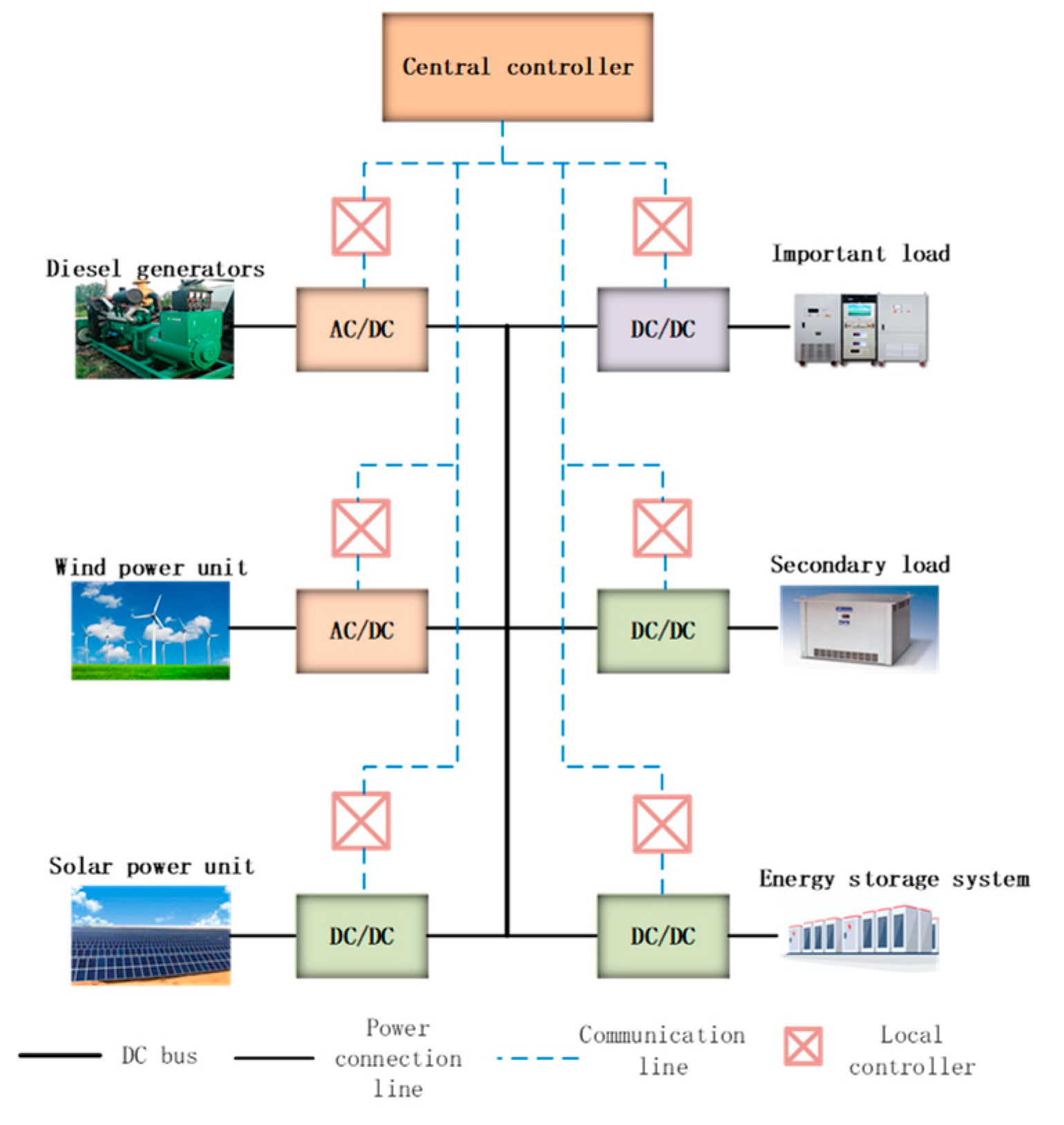
3. Control Strategy for the Operation of Isolated DC Microgrid
3.1. Control System of Islanded DC Microgrid
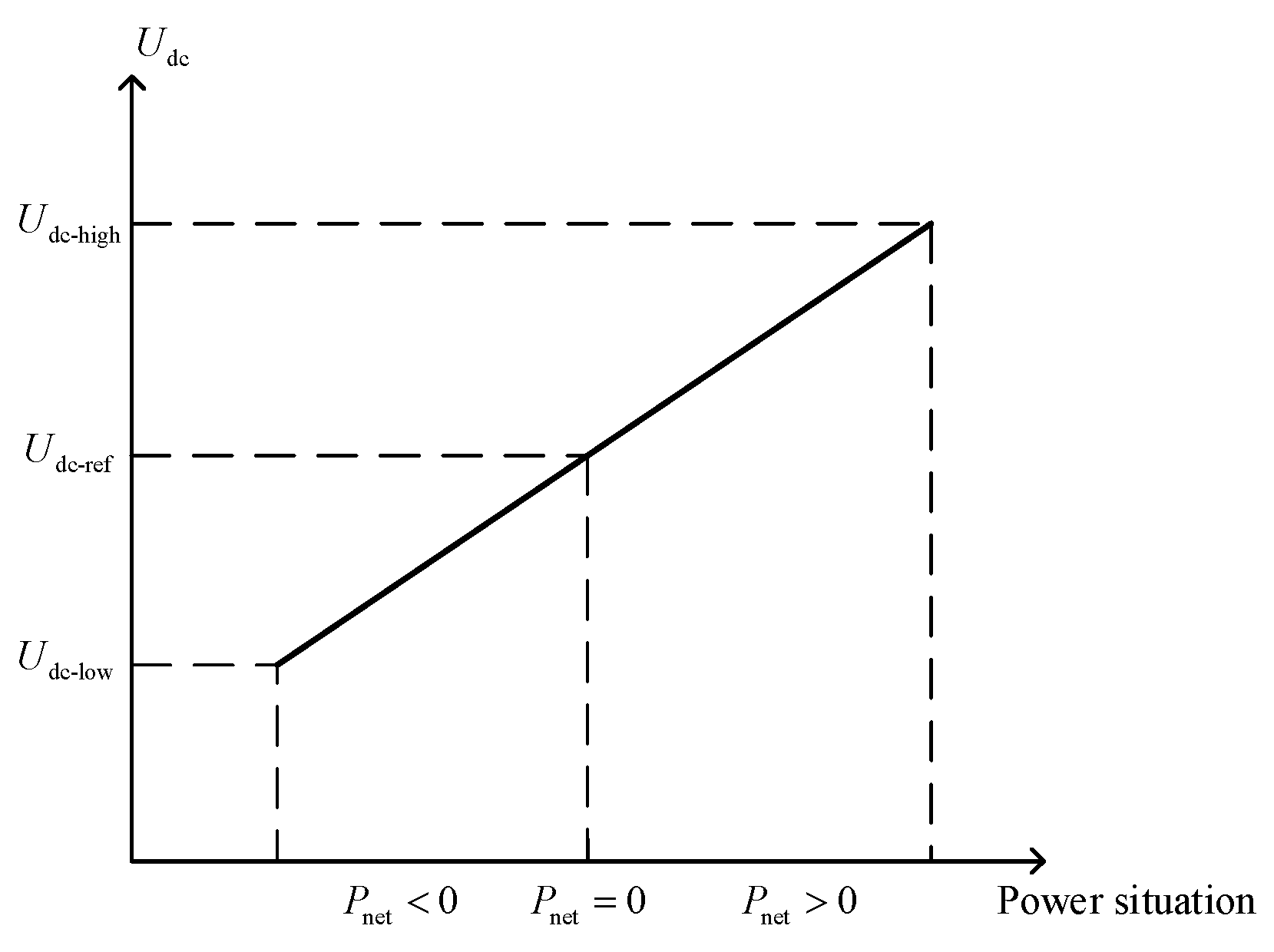
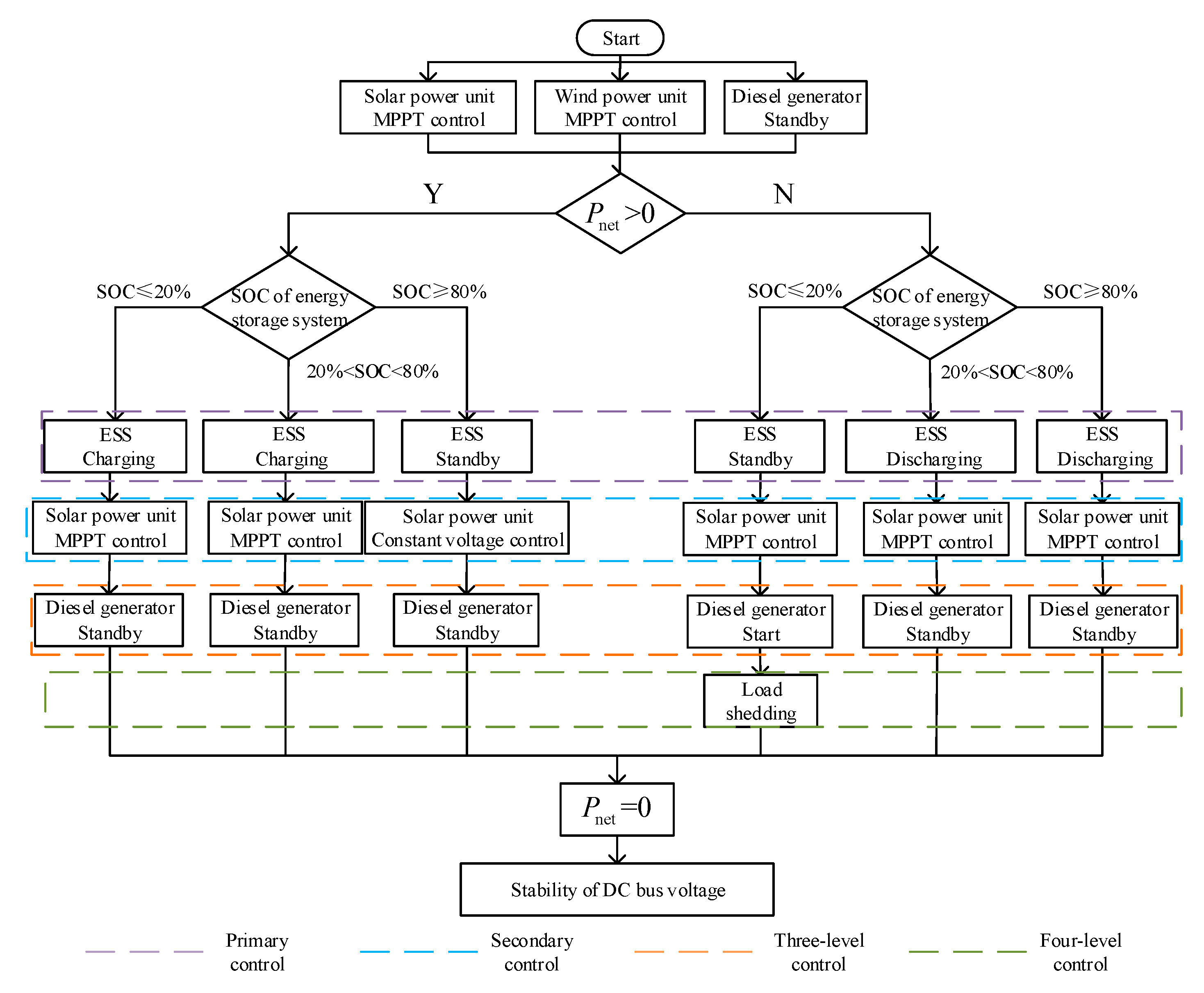
3.2. Operational Control Based on SOC of ESS
4. Simulation and Discussion
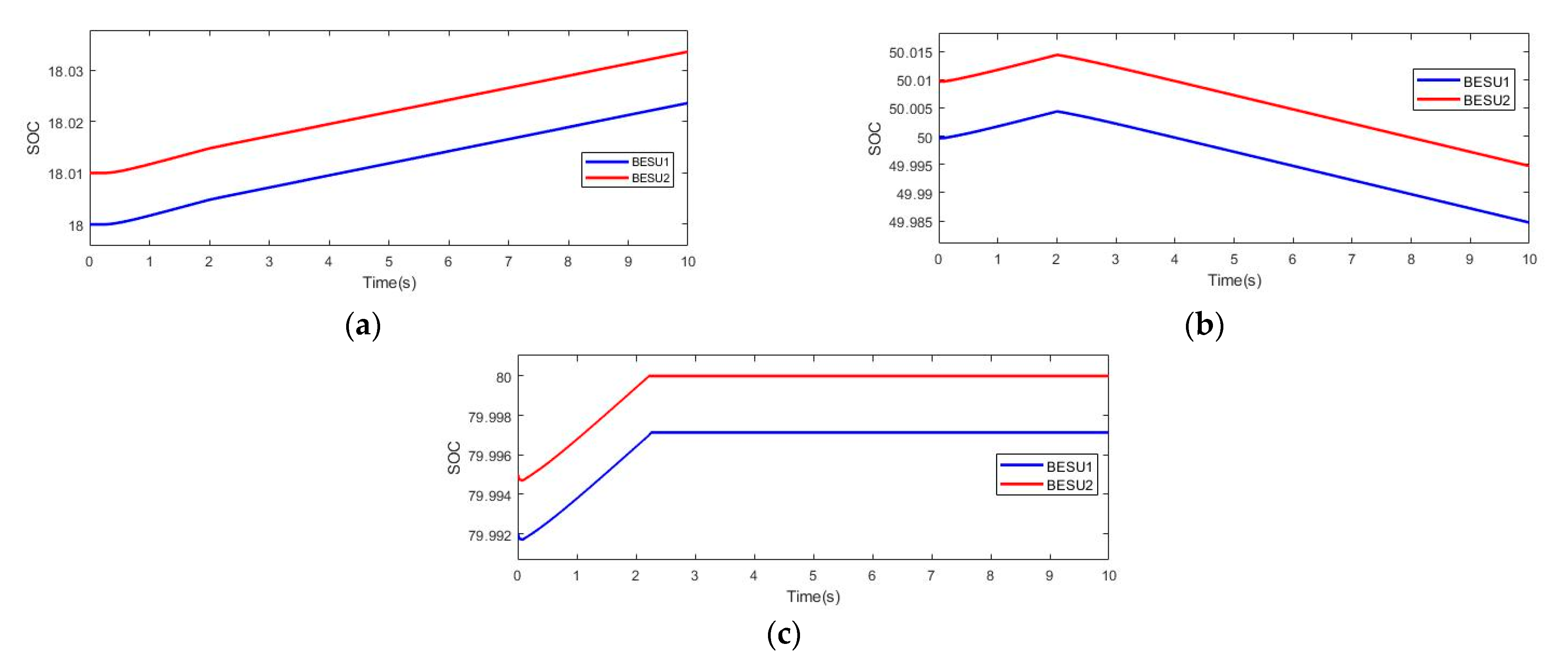
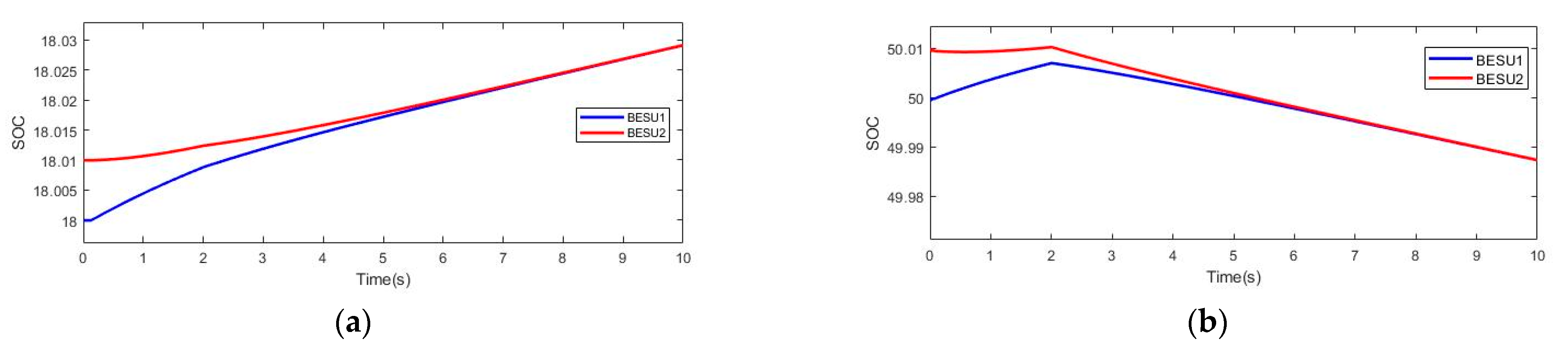
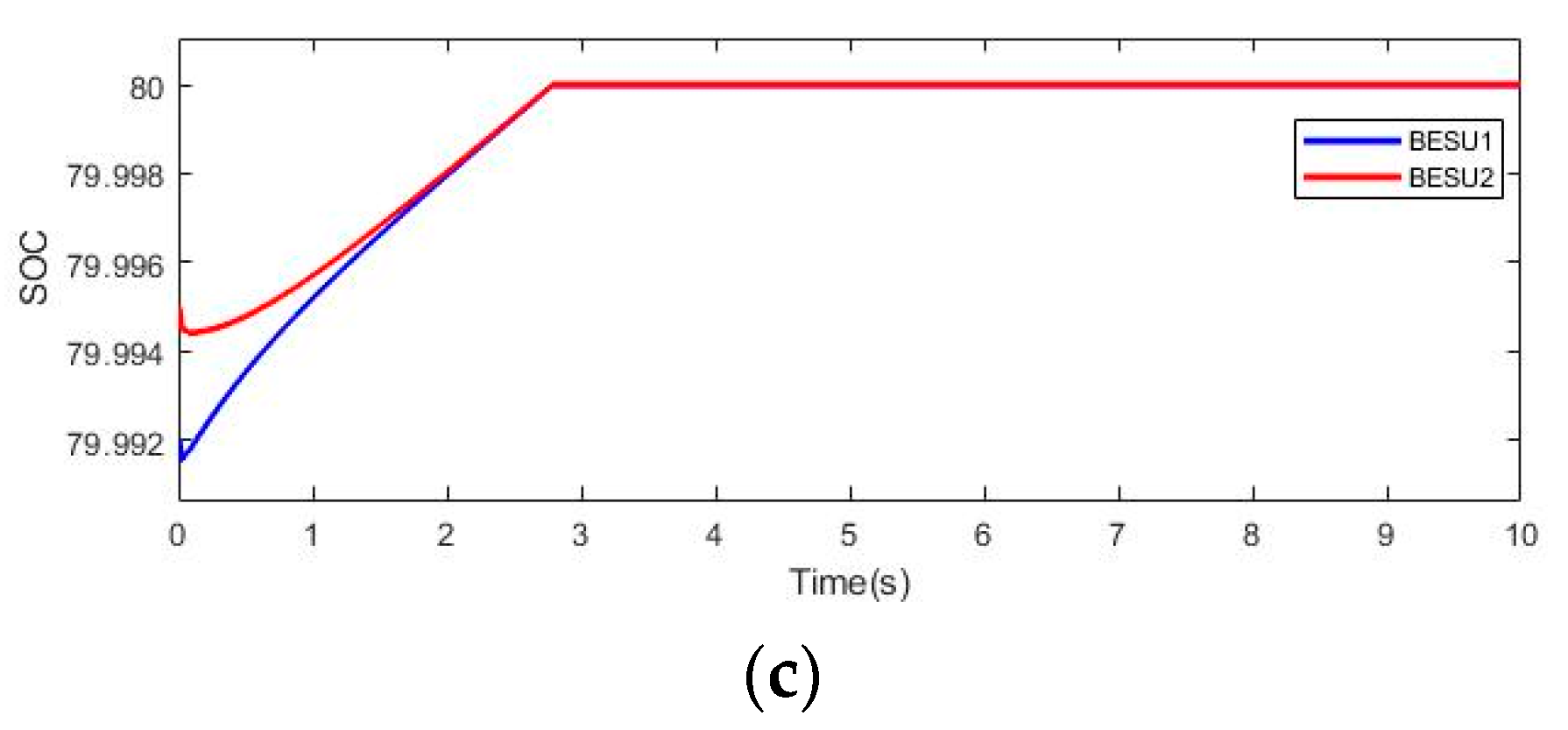
4.1. Simulation of the Control Strategy of the ESS
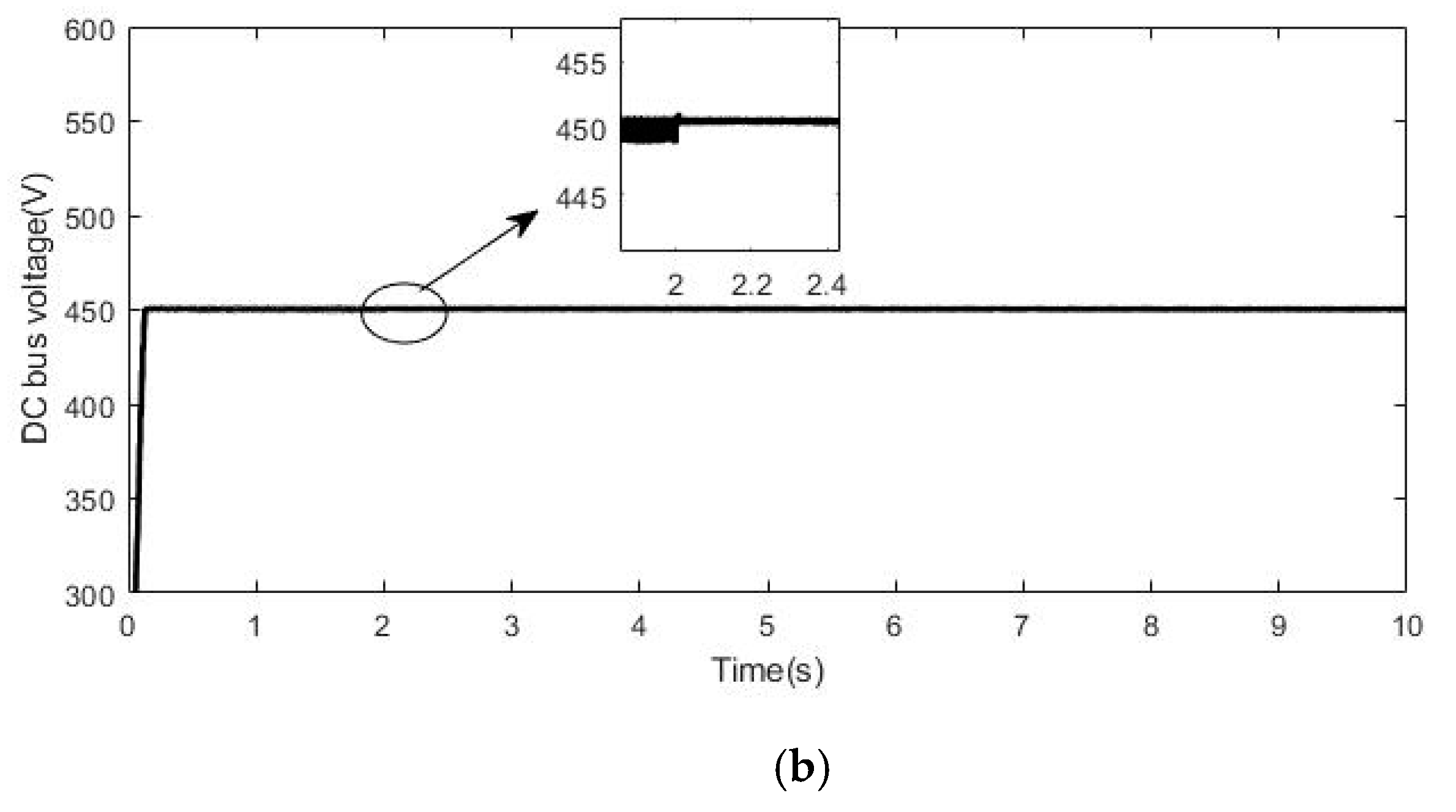
4.2. Operation Control Strategy of Microgrid
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Ahmed, D.; Ebeed, M.; Ali, A.; Alghamdi, A.S.; Kamel, S. Multi-Objective Energy Management of a Micro-Grid Considering Stochastic Nature of Load and Renewable Energy Resources. Electronics 2021, 10, 403. [Google Scholar] [CrossRef]
- Guo, J.; Chen, T.; Chaudhuri, B.; Hui, S.Y.R. Stability of Isolated Microgrids with Renewable Generation and Smart Loads. IEEE Trans. Sustain. Energy 2020, 11, 2845–2854. [Google Scholar] [CrossRef]
- Zhao, Z.; Zhang, J.; He, Y.; Zhang, Y.; Liu, M. Island DC microgrid hierarchical coordinated multi-mode control strategy. Energies 2019, 14, 3012. [Google Scholar] [CrossRef] [Green Version]
- Ould Amrouche, S.; Rekioua, D.; Rekioua, T.; Bacha, S. Overview of energy storage in renewable energy systems. Int. J. Hydrogen Energy 2016, 41, 20914–20927. [Google Scholar] [CrossRef]
- Misyris, G.S.; Doukas, D.I.; Papadopoulos, T.A.; Labridis, D.P.; Agelidis, V.G. State-of-Charge Estimation for Li-Ion Batteries: A More Accurate Hybrid Approach. IEEE Trans. Energy Convers. 2019, 34, 109–119. [Google Scholar] [CrossRef] [Green Version]
- Li, F.; Xie, K.; Yang, J. Optimization and analysis of a hybrid energy storage system in a small-scale standalone microgrid for remote area power supply (RAPS). Energies 2015, 8, 4802–4826. [Google Scholar] [CrossRef]
- Li, Z.; Xu, Y. Optimal coordinated energy dispatch of a multi-energy microgrid in grid-connected and islanded modes. Appl. Energy 2018, 210, 974–986. [Google Scholar] [CrossRef]
- Li, Y.; Yang, Z.; Li, G.; Zhao, D.; Tian, W. Optimal Scheduling of an Isolated Microgrid with Battery Storage Considering Load and Renewable Generation Uncertainties. IEEE Trans. Ind. Electron. 2019, 66, 1565–1575. [Google Scholar] [CrossRef] [Green Version]
- Huang, W.; Abu Qahouq, J.A. Energy Sharing Control Scheme for State-of-Charge Balancing of Distributed Battery Energy Storage System. IEEE Trans. Ind. Electron. 2015, 62, 2764–2776. [Google Scholar] [CrossRef]
- Kwon, M.; Choi, S. Control Scheme for Autonomous and Smooth Mode Switching of Bidirectional DC-DC Converters in a DC Microgrid. IEEE Trans. Power Electron. 2018, 33, 7094–7104. [Google Scholar] [CrossRef]
- Meng, W.; Wang, X.; Liu, S. Distributed load sharing of an inverter-based microgrid with reduced communication. IEEE Trans. Smart Grid 2018, 9, 1354–1364. [Google Scholar] [CrossRef]
- Basak, P.; Chowdhury, S.; Halder Nee Dey, S.; Chowdhury, S.P. A literature review on integration of distributed energy resources in the perspective of control, protection and stability of microgrid. Renew. Sustain. Energy Rev. 2012, 16, 5545–5556. [Google Scholar] [CrossRef]
- Song, X.; Lin, H.; De, G.; Li, H.; Fu, X.; Tan, Z. An energy optimal dispatching model of an integrated energy system based on uncertain bilevel programming. Energies 2020, 13, 477. [Google Scholar] [CrossRef] [Green Version]
- Marzebali, M.H.; Mazidi, M.; Mohiti, M. An adaptive droop-based control strategy for fuel cell-battery hybrid energy storage system to support primary frequency in stand-alone microgrids. J. Energy Storage 2020, 27, 101127. [Google Scholar] [CrossRef]
- Ríos, S.J.; Pagano, D.J.; Lucas, K.E. Bidirectional Power Sharing for DC Microgrid Enabled by Dual Active Bridge DC-DC Converter. Energies 2021, 14, 404. [Google Scholar] [CrossRef]
- Kim, D.E. Power flow study of low-voltage DC micro-grid and control of energy storage system in the grid. J. Electr. Eng. Technol. 2017, 12, 549–558. [Google Scholar] [CrossRef] [Green Version]
- Jones, A.J.; Weaver, W.W. Optimal droop surface control of dc microgrids based on battery state of charge. In Proceedings of the ECCE 2016 IEEE Energy Conversion Congress and Exposition, Milwaukee, Wisconsin, 18–22 September 2016. [Google Scholar]
- Lu, X.; Sun, K.; Guerrero, J.M.; Vasquez, J.C.; Huang, L. State-of-charge balance using adaptive droop control for distributed energy storage systems in DC microgrid applications. IEEE Trans. Ind. Electron. 2014, 61, 2804–2815. [Google Scholar] [CrossRef] [Green Version]
- Shuai, Z.; Fang, J.; Ning, F.; Shen, Z.J. Hierarchical structure and bus voltage control of DC microgrid. Renew. Sustain. Energy Rev. 2018, 82, 3670–3682. [Google Scholar] [CrossRef]
- Lee, J.O.; Kim, E.S.; Moon, S. Il Determining P-Q Droop Coefficients of Renewable Generators for Voltage Regulation in an Islanded Microgrid. Energy Procedia 2017, 107, 122–129. [Google Scholar] [CrossRef]
- Bracale, A.; Caramia, P.; Carpinelli, G.; Mancini, E.; Mottola, F. Optimal control strategy of a DC micro grid. Int. J. Electr. Power Energy Syst. 2015, 67, 25–38. [Google Scholar] [CrossRef]
- Wen, H.; Zhu, W. Control and Protection of DC Microgird with Battery Energy Storage System. In Proceedings of the 2016 IEEE International Conference on Power Electronics, Drives and Energy Systems (PEDES), Thiruvananthapuram, India, 14–17 December 2016; pp. 1–6. [Google Scholar]
- Wen, H.; Zheng, K.; Du, Y. Hierarchical coordinated control for DC microgrid with crowbar and load shedding control. In Proceedings of the 2017 IEEE 3rd International Future Energy Electronics Conference and ECCE Asia (IFEEC 2017—ECCE Asia), Kaohsiung, Taiwan, 3–7 June 2017; pp. 2208–2212. [Google Scholar]
- Mohammadi, J.; Badrkhani Ajaei, F. Improved Mode-Adaptive Droop Control Strategy for the DC Microgrid. IEEE Access 2019, 7, 86421–86435. [Google Scholar] [CrossRef]
- Morstyn, T.; Hredzak, B.; Demetriades, G.D.; Agelidis, V.G. Unified distributed control for DC microgrid operating modes. IEEE Trans. Power Syst. 2016, 31, 802–812. [Google Scholar] [CrossRef]
- Chen, M.; Ma, S.; Wan, H.; Wu, J.; Jiang, Y. Distributed control strategy for DC microgrids of photovoltaic energy storage systems in off-grid operation. Energies 2018, 11, 2637. [Google Scholar] [CrossRef] [Green Version]
- Mohammadi, J.; Ajaei, F.B. Versatile decentralised control of the DC microgrid. IET Smart Grid 2019, 2, 77–88. [Google Scholar] [CrossRef]
- Lin, P.; Zhang, C.; Wang, J.; Jin, C.; Wang, P. On Autonomous Large-Signal Stabilization for Islanded Multibus DC Microgrids: A Uniform Nonsmooth Control Scheme. IEEE Trans. Ind. Electron. 2020, 67, 4600–4612. [Google Scholar] [CrossRef]
- Xia, Y.; Yu, M.; Yang, P.; Peng, Y.; Wei, W. Generation-Storage Coordination for Islanded DC Microgrids Dominated by PV Generators. IEEE Trans. Energy Convers. 2019, 34, 130–138. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Status | Mode 1 | Mode 2 | Mode 3 | Mode 4 | Mode 5 | Mode 6 | |
|---|---|---|---|---|---|---|---|
| Micro Source | |||||||
| SOC | <20% | <20% | 20–80% | 20–80% | >80% | >80% | |
| <0 | >0 | <0 | >0 | <0 | >0 | ||
| ESS | Standby | Charging | Discharging | Charging | Discharging | Standby | |
| Solar power unit | MPPT | MPPT | MPPT | MPPT | MPPT | CVC | |
| Wind power unit | MPPT | MPPT | MPPT | MPPT | MPPT | MPPT | |
| Diesel generators | Start | Standby | Standby | Standby | Standby | Standby | |
| Load | Cut load | All load | All load | All load | All load | All load | |
| Parameter | Symbol | Value | Unit |
|---|---|---|---|
| DC bus voltage reference value | 450 | V | |
| ESU’s capacity | 200 | Ah | |
| Maximum state-of-charge threshold | 80% | - | |
| Minimum state-of-charge threshold | 20% | - | |
| ESU’s reference voltage | 100 | v | |
| Maximum power of solar power unit | 20 | kW | |
| Solar constant voltage control reference power | 15 | kW | |
| Maximum power of wind power unit | 5.5 | kW | |
| Diesel generator power | 10 | kW | |
| Important load power | 15 | kW | |
| Secondary load power | 5 | kW |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lv, J.; Wang, X.; Wang, G.; Song, Y. Research on Control Strategy of Isolated DC Microgrid Based on SOC of Energy Storage System. Electronics 2021, 10, 834. https://doi.org/10.3390/electronics10070834
Lv J, Wang X, Wang G, Song Y. Research on Control Strategy of Isolated DC Microgrid Based on SOC of Energy Storage System. Electronics. 2021; 10(7):834. https://doi.org/10.3390/electronics10070834
Chicago/Turabian StyleLv, Jiechao, Xiaoli Wang, Guishuo Wang, and Yuhou Song. 2021. "Research on Control Strategy of Isolated DC Microgrid Based on SOC of Energy Storage System" Electronics 10, no. 7: 834. https://doi.org/10.3390/electronics10070834