
Using Zone Impedance Matching Technique to Improve the Power Transfer Capability of an Inductive Charging System over a Long Distance


Abstract
:1. Introduction
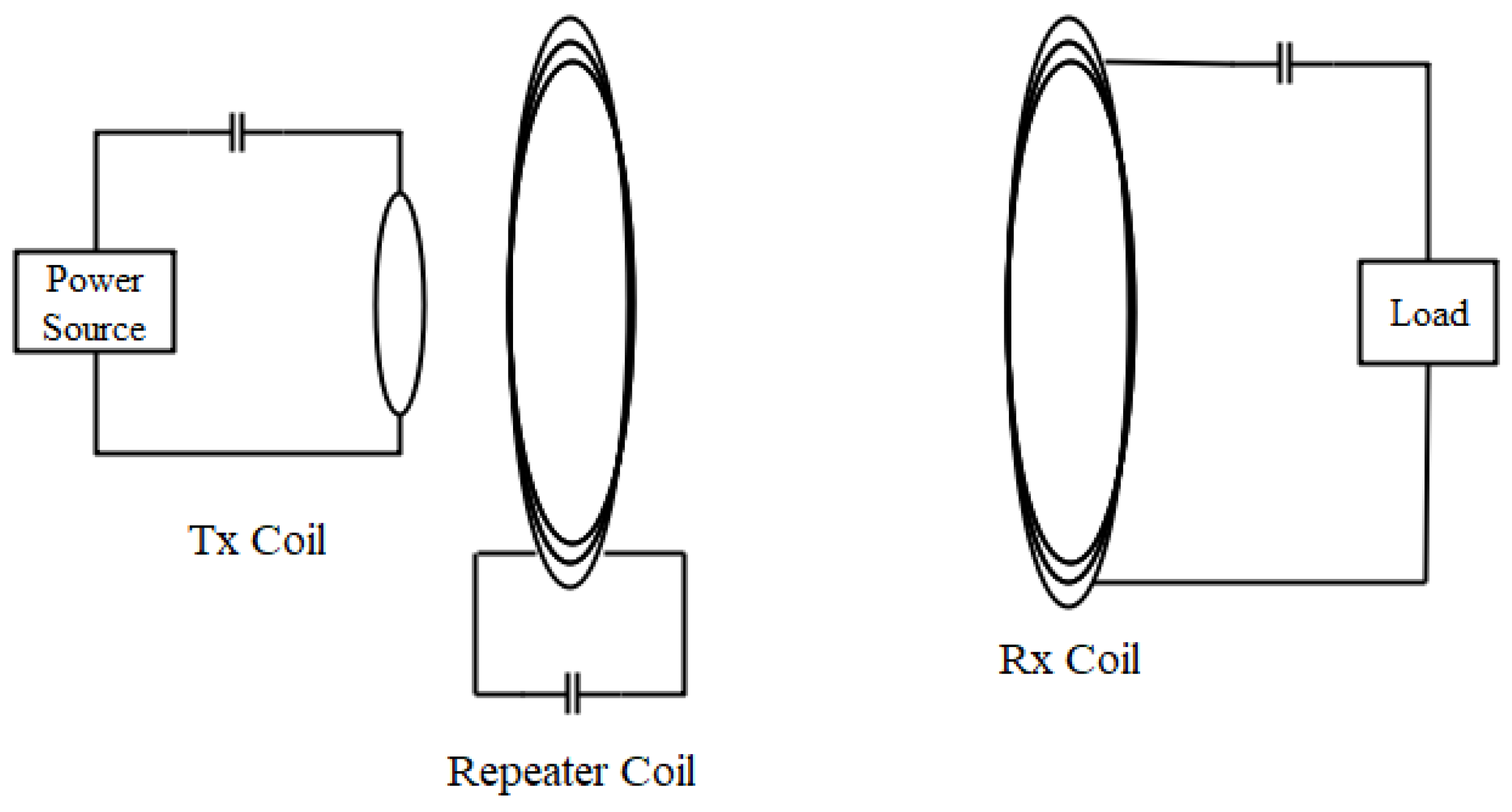
2. Conventional Three-Coil IPT System
3. Multi-Tap Three-Coil IPT System
3.1. System Overview
3.2. Circuit Model
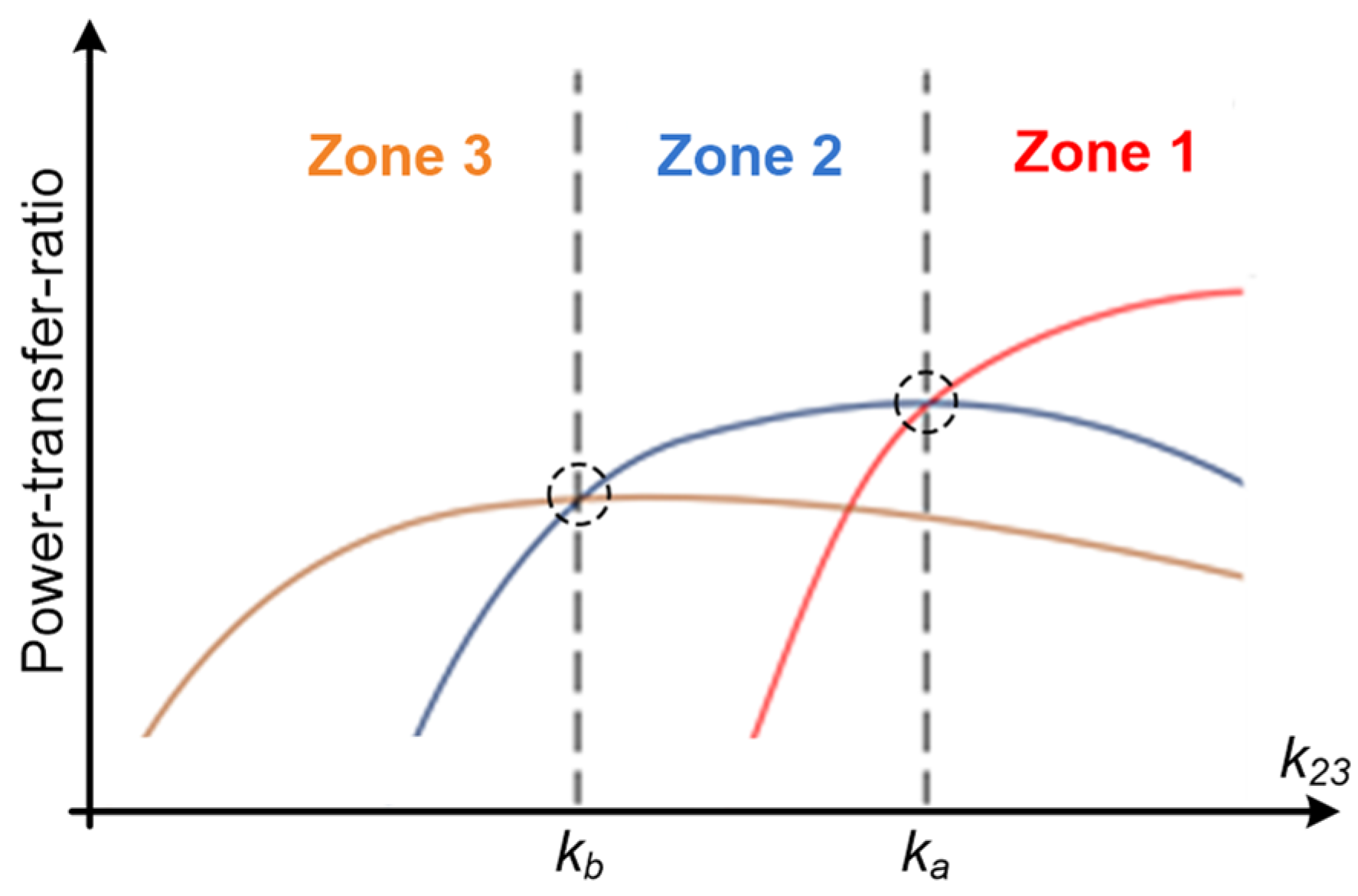
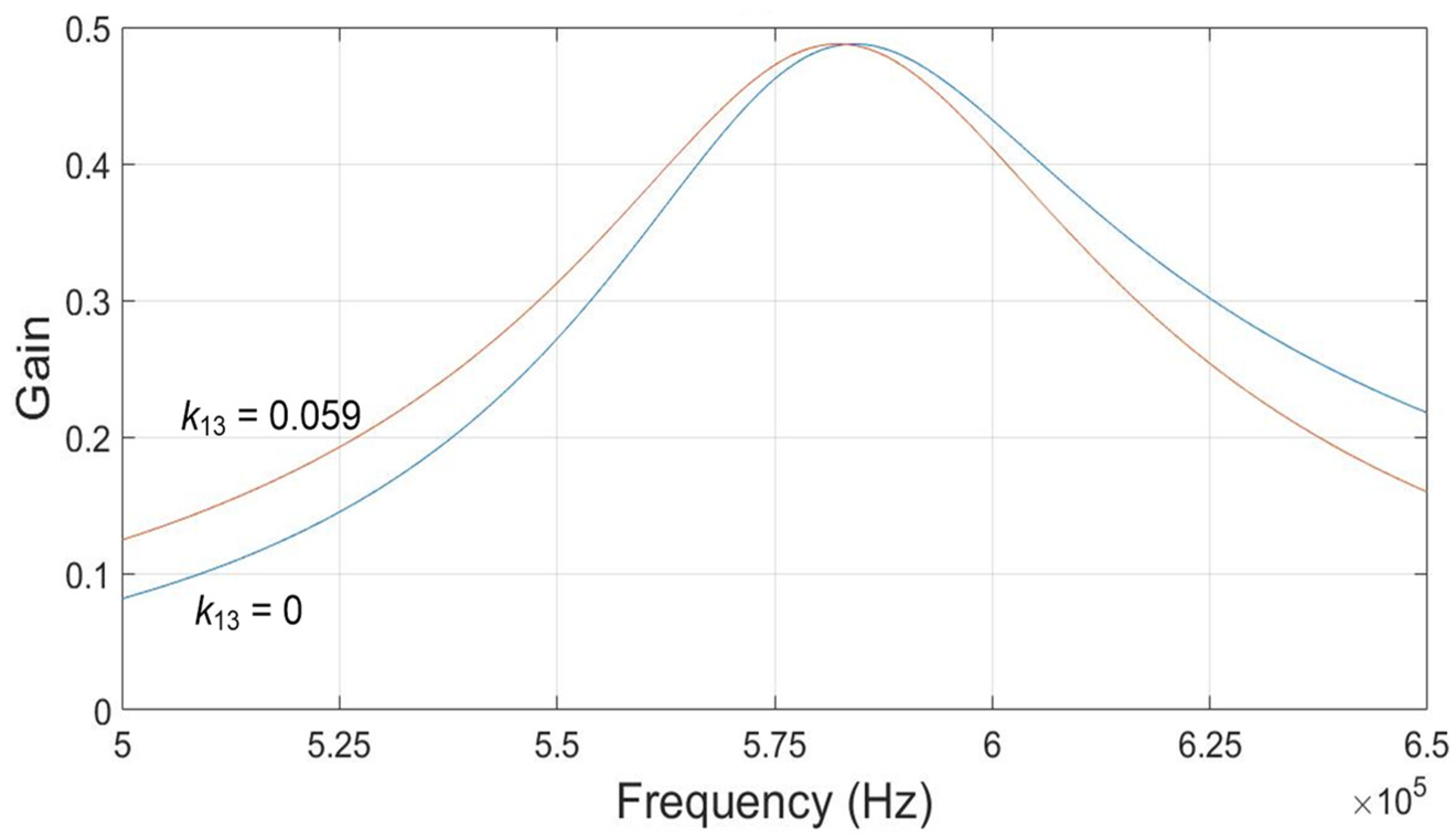
3.3. Desgin Methodology
4. Control Method
5. Experimental Verification
5.1. Desgin Methodology
5.2. Controller Desgin
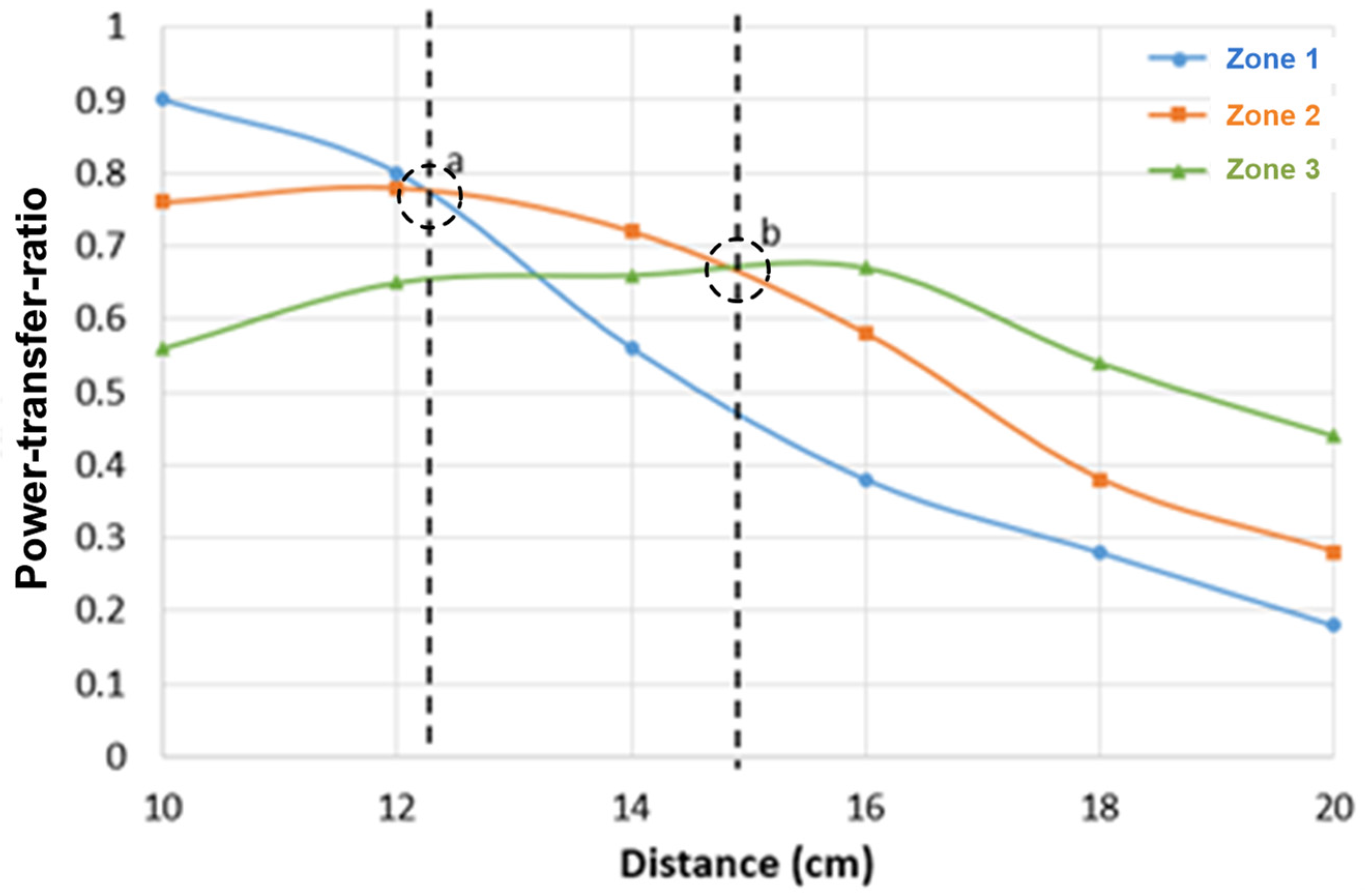
5.3. Results—Distance Variation
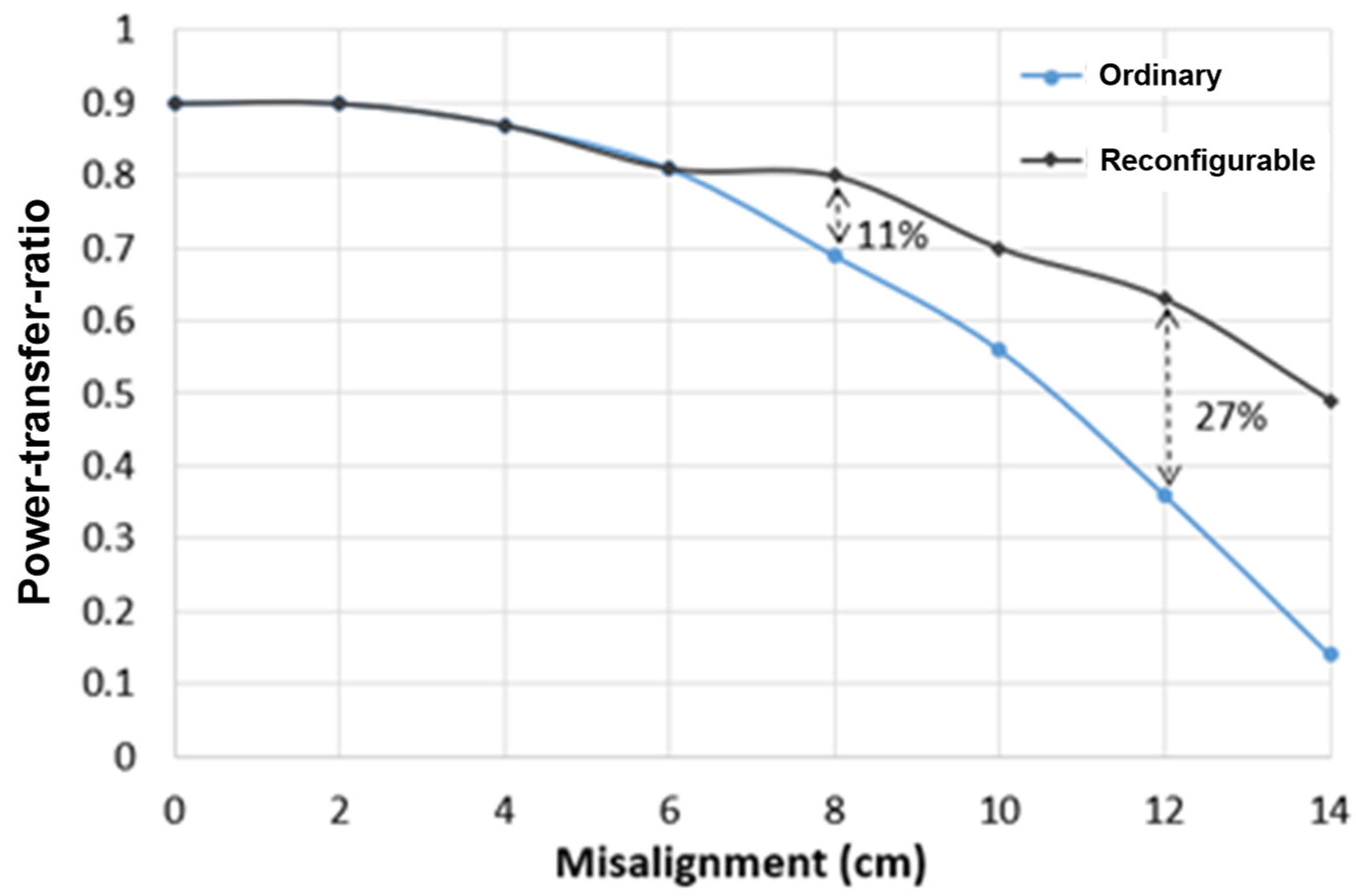
5.4. Results—Lateral Misalignment
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
Nomenclature
| Self-inductance of nth coil | |
| Parasitic resistance of nth coil | |
| External capacitor of nth coil | |
| Coupling coefficient between ith coil and jth coil | |
| Mutual inductance between ith coil and jth coil | |
| AC input voltage | |
| Power source impedance | |
| Load resistance | |
| Resonant angular frequency | |
| Resonant angular frequency | |
| Output voltage | |
| Total impedance of ith coil | |
| Quality factor of ith coil at the resonant frequency | |
| Inductance of different turns of transmitter coil | |
| Parasitic resistance of different turns of transmitter coil | |
| External capacitors for different turns of transmitter coil | |
| Total impedance of different turns of transmitter coil | |
| Coupling coefficient between different turns of transmitter coil and repeater coil | |
| Mutual inductance between different turns of transmitter coil and repeater coil | |
| Quality factor of different turns of transmitter coil | |
| Current in ith coil |
References
- Hui, S.Y.R. Planar wireless charging technology for portable electronic products and qi. Proc. IEEE 2013, 101, 1290–1301. [Google Scholar] [CrossRef] [Green Version]
- Wu, R.; Li, W.; Luo, H.; Sin, J.K.O.; Yue, C.C. Design and characterization of wireless power links for brain-machine interface applications. IEEE Trans. Power Electron. 2014, 29, 5462–5471. [Google Scholar] [CrossRef]
- Li, S.; Mi, C. Wireless power transfer for electric vehicle applications. IEEE J. Emerg. Sel. Top. Power Electron. 2015, 3, 4–17. [Google Scholar]
- Zhou, J.; Zhang, B.; Xiao, W.; Qiu, D.; Chen, Y. Nonlinear parity-time-symmetric model for constant efficiency wireless power transfer application to a drone-in-flight wireless charging platform. IEEE Trans. Ind. Electron. 2019, 66, 4097–4107. [Google Scholar] [CrossRef]
- Lee, C.K.; Zhong, W.X.; Hui, S.Y.R. Effects of magnetic coupling of non-adjacent resonators on wireless power domino-resonator systems. IEEE Trans. Power Electron. 2012, 27, 1905–1916. [Google Scholar] [CrossRef] [Green Version]
- Zhang, W.; Wong, S.C.; Tse, C.K.; Chen, Q. Design for efficiency optimization and voltage controllability of series-series compensated inductive power transfer systems. IEEE Trans. Power Electron. 2014, 29, 191–200. [Google Scholar] [CrossRef]
- Kissin, M.L.G.; Boys, J.T.; Covic, G.A. Interphase mutual inductance in polyphase inductive power transfer systems. IEEE Trans. Ind. Electron. 2009, 56, 2393–2400. [Google Scholar] [CrossRef]
- Covic, G.A.; Boys, J.T.; Kissin, M.L.G.; Lu, H.G. A three-phase inductive power transfer system for roadway-powered vehicles. IEEE Trans. Ind. Electron. 2007, 54, 3370–3378. [Google Scholar] [CrossRef]
- Miller, J.M.; Onar, O.C.; Chinthavali, M. Primary-side power flow control of wireless power transfer for electric vehicle charging. IEEE J. Emerg. Sel. Top. Power Electron. 2015, 3, 147–162. [Google Scholar] [CrossRef]
- Jang, Y.; Jovanovic, M. A contactless electrical energy transmission system for portable-telephone battery chargers. IEEE Trans. Ind. Electron. 2003, 50, 520–527. [Google Scholar] [CrossRef] [Green Version]
- Covic, G.A.; Boys, J.T. Modern trends in inductive power transfer for transportation applications. IEEE J. Emerg. Sel. Top. Power Electron. 2013, 1, 28–41. [Google Scholar] [CrossRef]
- Lee, J.; Han, B. A bidirectional wireless power transfer EV charger using self-resonant PWM. IEEE Trans. Power Electron. 2015, 30, 1784–1787. [Google Scholar] [CrossRef]
- Hui, S.; Zhong, W.; Lee, C. A critical review of recent progress in mid-range wireless power transfer. IEEE Trans. Power Electron. 2014, 29, 4500–4511. [Google Scholar] [CrossRef] [Green Version]
- Kurs, A.; Karalis, A.; Moffatt, R.; Joannopoulos, J.D.; Fisher, P.; Soljacic, M. Wireless power transfer via strongly coupled magnetic resonances. Science 2007, 317, 83–86. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Cheon, S.; Kim, Y.H.; Kang, S.Y.; Lee, M.L.; Lee, J.M.; Zyung, T. Circuit-model-based analysis of a wireless energy-transfer system via coupled magnetic resonances. IEEE Trans. Ind. Electron. 2011, 58, 2906–2914. [Google Scholar] [CrossRef]
- Sample, A.P.; Meyer, D.A.; Smith, J.R. Analysis, experimental results, and range adaptation of magnetically coupled resonators for wireless power transfer. IEEE Trans. Ind. Electron. 2011, 58, 544–554. [Google Scholar] [CrossRef]
- Park, J.; Tak, Y.; Kim, Y.; Kim, Y.; Nam, S. Investigation of adaptive matching methods for near-field wireless power transfer. IEEE Trans. Antennas Propoagation 2011, 59, 1769–1773. [Google Scholar] [CrossRef]
- Dang, Z.; Qahouq, J.A.A. Modeling and investigation of magnetic resonance coupled wireless power transfer system with lateral misalignment. In Proceedings of the 2014 IEEE Applied Power Electronics Conference and Exposition—APEC 2014, Fort Worth, TX, USA, 16–20 March 2014; pp. 1317–1322. [Google Scholar]
- Yongseok, L.; Hoyoung, T.; Seungok, L.; Jongsun, P. An Adaptive Impedance-Matching Network Based on a Novel Capacitor Matrix for Wireless Power Transfer. IEEE Trans. Power Electron. 2014, 29, 4403–4413. [Google Scholar]
- Zhang, Y.; Zhao, Z. Frequency-splitting analysis of four-coil resonant wireless power transfer. IEEE. Trans. Ind. Appl. 2014, 50, 2436–2445. [Google Scholar] [CrossRef]
- Kim, J.; Choi, W.-S.; Jeong, J. Loop switching technique for wireless power transfer using magnetic resonance coupling. Progr. Electromagn. Res. 2013, 138, 197–209. [Google Scholar] [CrossRef] [Green Version]
- Park, B.-C.; Lee, J.-H. Adaptive impedance matching of wireless power transmission using multi-loop feed with single operating frequency. IEEE Trans. Antennas Propag. 2014, 62, 2851–2856. [Google Scholar]
- Dang, Z.; Cao, Y.; Qahouq, J.A.A. Reconfigurable Magnetic Resonance-Coupled Wireless Power Transfer System. IEEE Trans. Power Electron. 2015, 30, 6057–6069. [Google Scholar] [CrossRef]
- Abdelatty, O.; Wang, X.; Mortazawi, A. Position-Insensitive Wireless Power Transfer Based on Nonlinear Resonant Circuits. IEEE Trans. Micro. Theory Tech. 2019, 67, 3844–3855. [Google Scholar] [CrossRef]
- Kim, K.; Choi, H. High-efficiency high-voltage class F amplifier for high-frequency wireless ultrasound systems. PLoS ONE 2021, 16, e0249034. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Values |
|---|---|
| Radius of repeater coil | 10 cm |
| Turns of repeater coil | 9 |
| L2 | 33 μH |
| R2 | 0.23 Ω |
| C2 | 2.25 nF |
| Radius of receiver coil | 10 cm |
| Turns of receiver coil | 9 |
| L3 | 33 μH |
| R3 | 0.23 Ω |
| C3 | 2.25 nF |
| Zones | No. of Turns | k12 | M12 | k23 |
|---|---|---|---|---|
| Zone 1 | 4 | 0.28 | 4.0 μH | k23 ≥ 0.09 |
| Zone 1 | 3 | 0.274 | 3.1 μH | 0.06 < k23 < 0.09 |
| Zone 1 | 2 | 0.268 | 2.1 μH | k23 ≤ 0.06 |
| Parameters | Values |
|---|---|
| Inner radius of transmitter coil | 5 cm |
| Outer radius of transmitter coil | 6 cm |
| Total turns of transmitter coil | 4 |
| L1–1 | 6.2 μH |
| L1–2 | 3.8 μH |
| L1–3 | 1.9 μH |
| R1–1 | 1 Ω |
| R1–2 | 0.6 Ω |
| R1–3 | 0.3 Ω |
| C1–1 | 12 nF |
| C1–2 | 20 nF |
| C1–3 | 40 nF |
| 50 Ω | |
| RL | 50 Ω |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hu, J.; He, L.; Liu, H.; Ng, R.W.M.; Lee, C.-K. Using Zone Impedance Matching Technique to Improve the Power Transfer Capability of an Inductive Charging System over a Long Distance. Electronics 2022, 11, 1982. https://doi.org/10.3390/electronics11131982
Hu J, He L, Liu H, Ng RWM, Lee C-K. Using Zone Impedance Matching Technique to Improve the Power Transfer Capability of an Inductive Charging System over a Long Distance. Electronics. 2022; 11(13):1982. https://doi.org/10.3390/electronics11131982
Chicago/Turabian StyleHu, Jintao, Liangxi He, Heng Liu, Raymond Wai Man Ng, and Chi-Kwan Lee. 2022. "Using Zone Impedance Matching Technique to Improve the Power Transfer Capability of an Inductive Charging System over a Long Distance" Electronics 11, no. 13: 1982. https://doi.org/10.3390/electronics11131982
APA StyleHu, J., He, L., Liu, H., Ng, R. W. M., & Lee, C.-K. (2022). Using Zone Impedance Matching Technique to Improve the Power Transfer Capability of an Inductive Charging System over a Long Distance. Electronics, 11(13), 1982. https://doi.org/10.3390/electronics11131982