
Development of Electric Drive on the Basis of Five-Phase Synchronous Electric Motor



Abstract
:1. Introduction
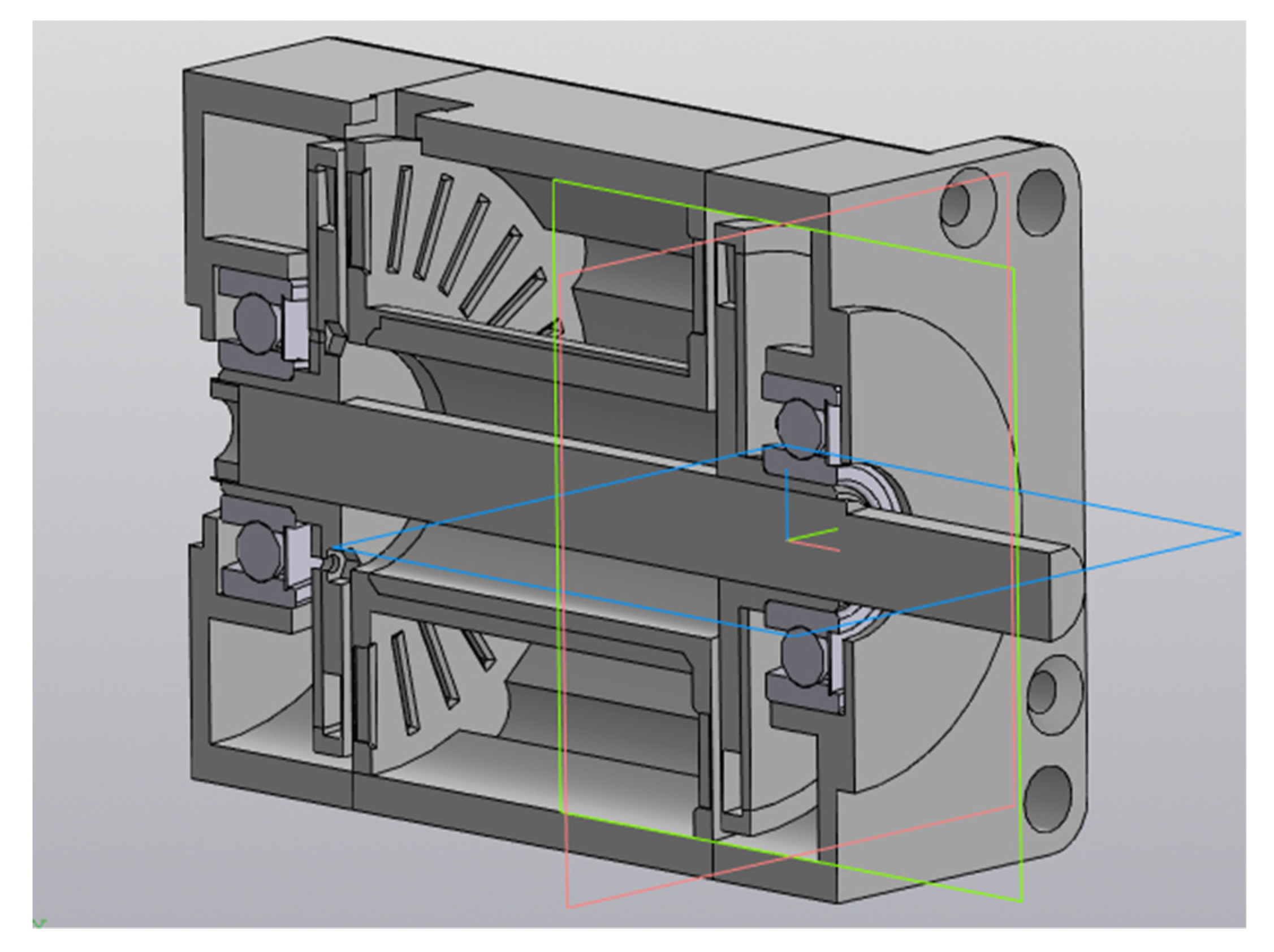
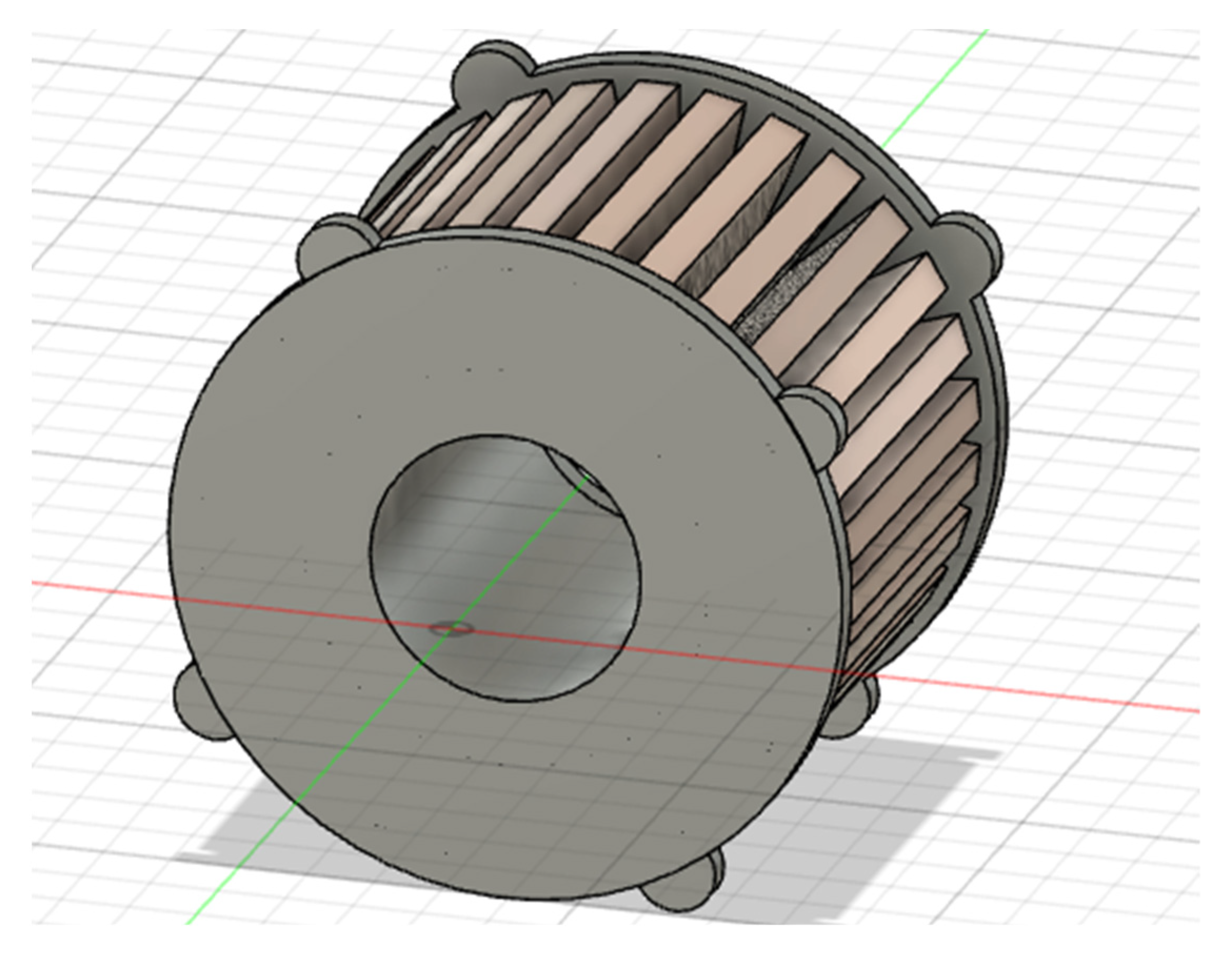
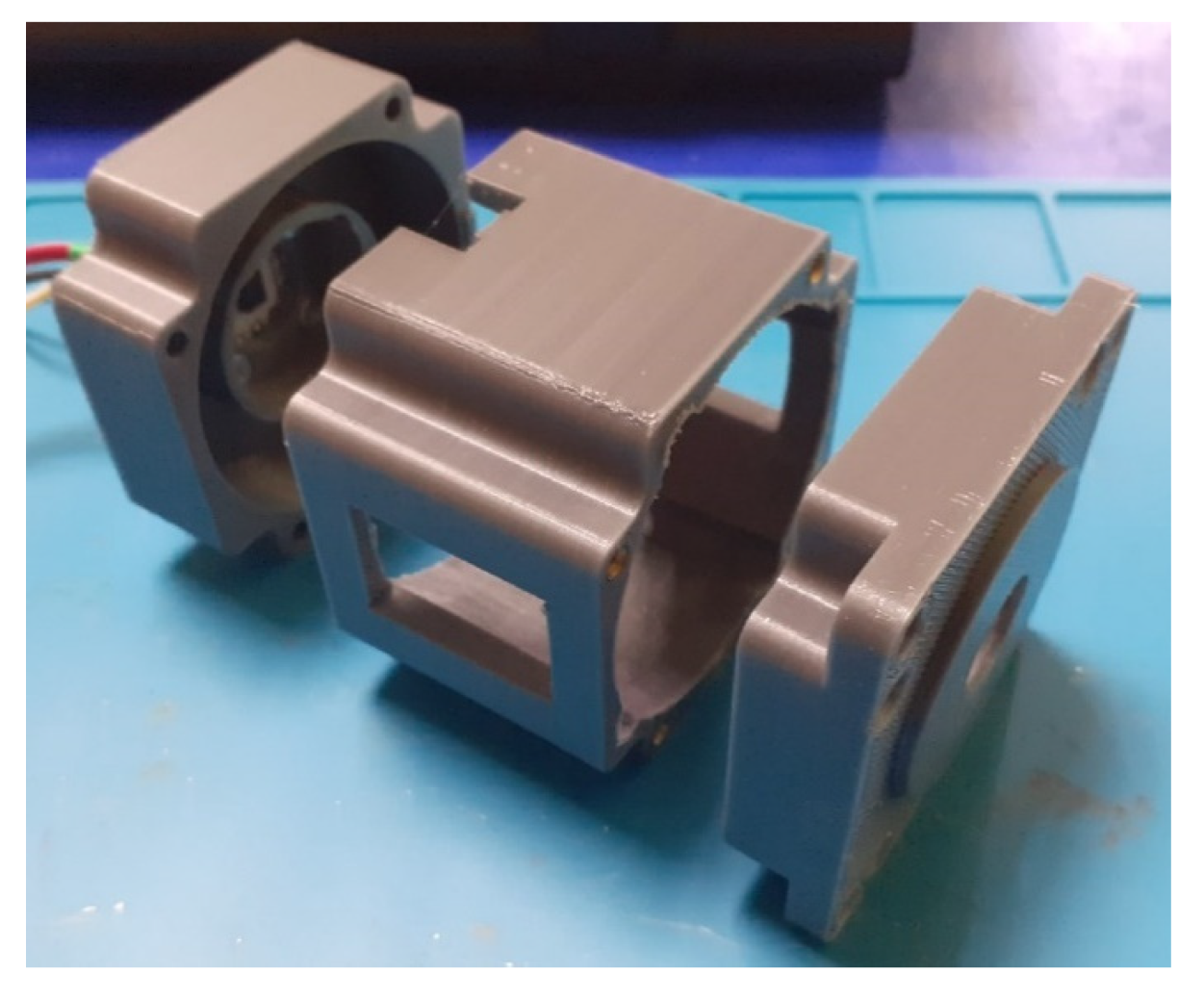
2. Materials and Methods
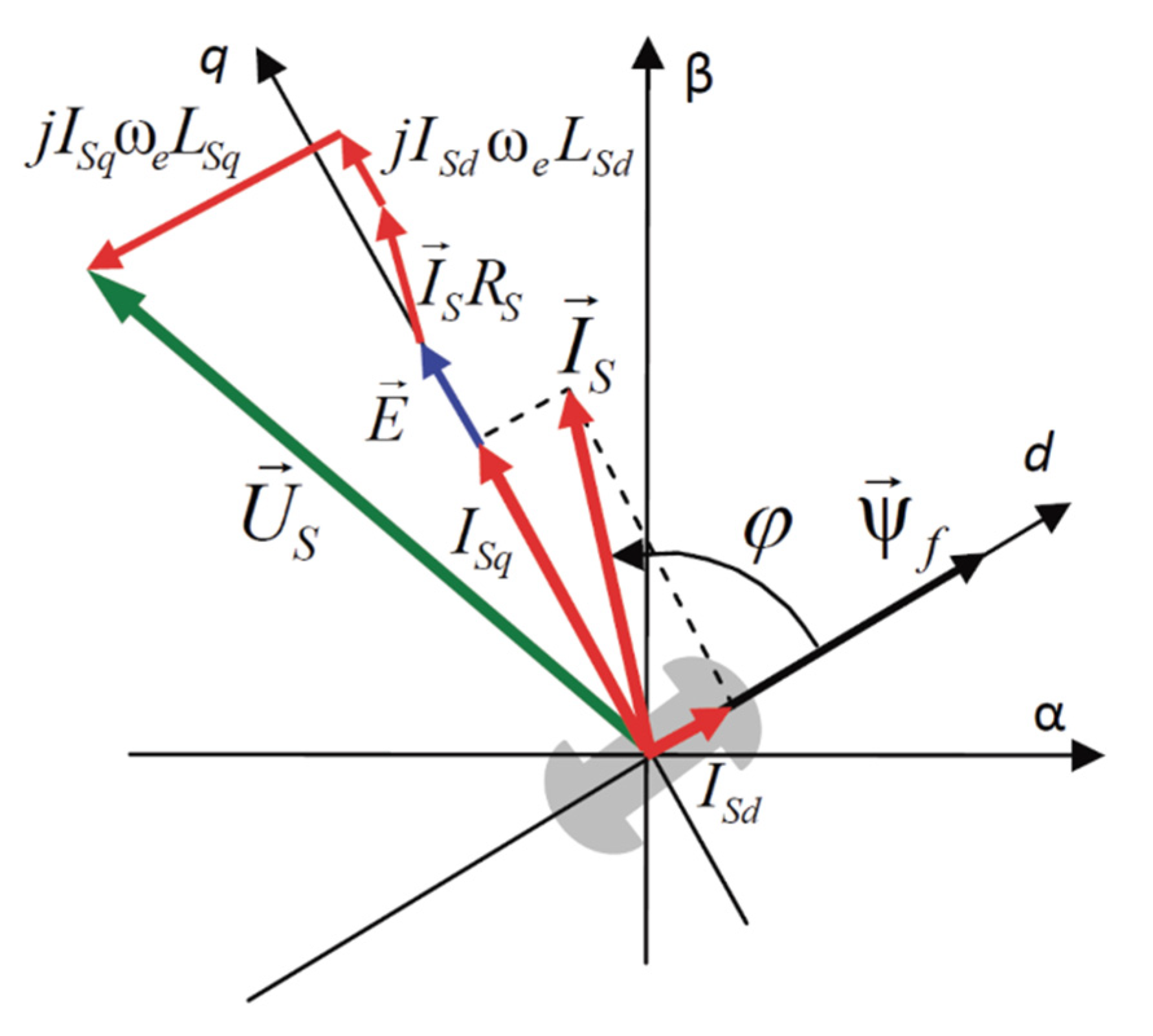
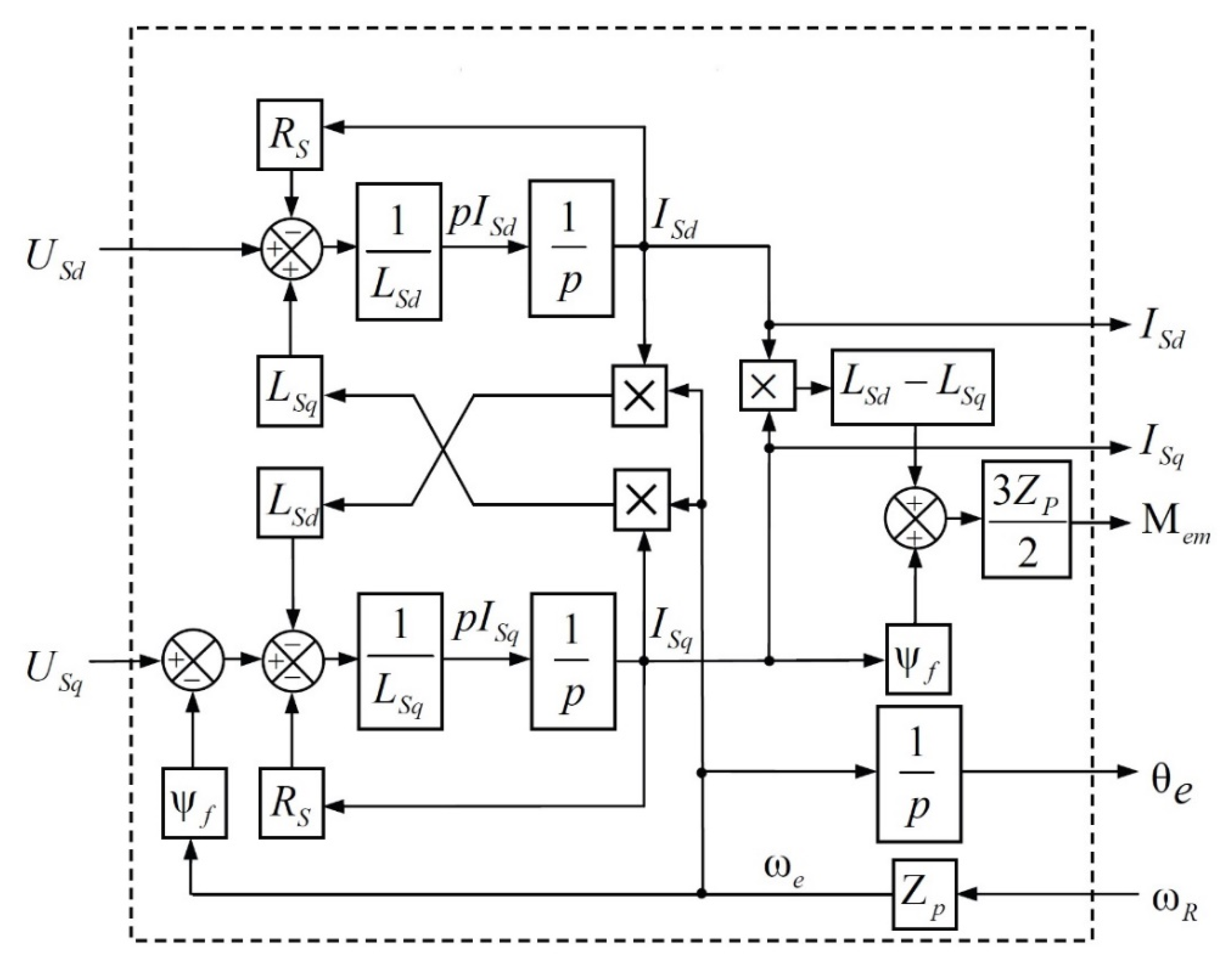
2.1. Mathematical Model of a Five-Phase Synchronous Motor
2.2. Synchronous Motor Drive System Based on Five-Phase Voltage Regulator Using IGBT
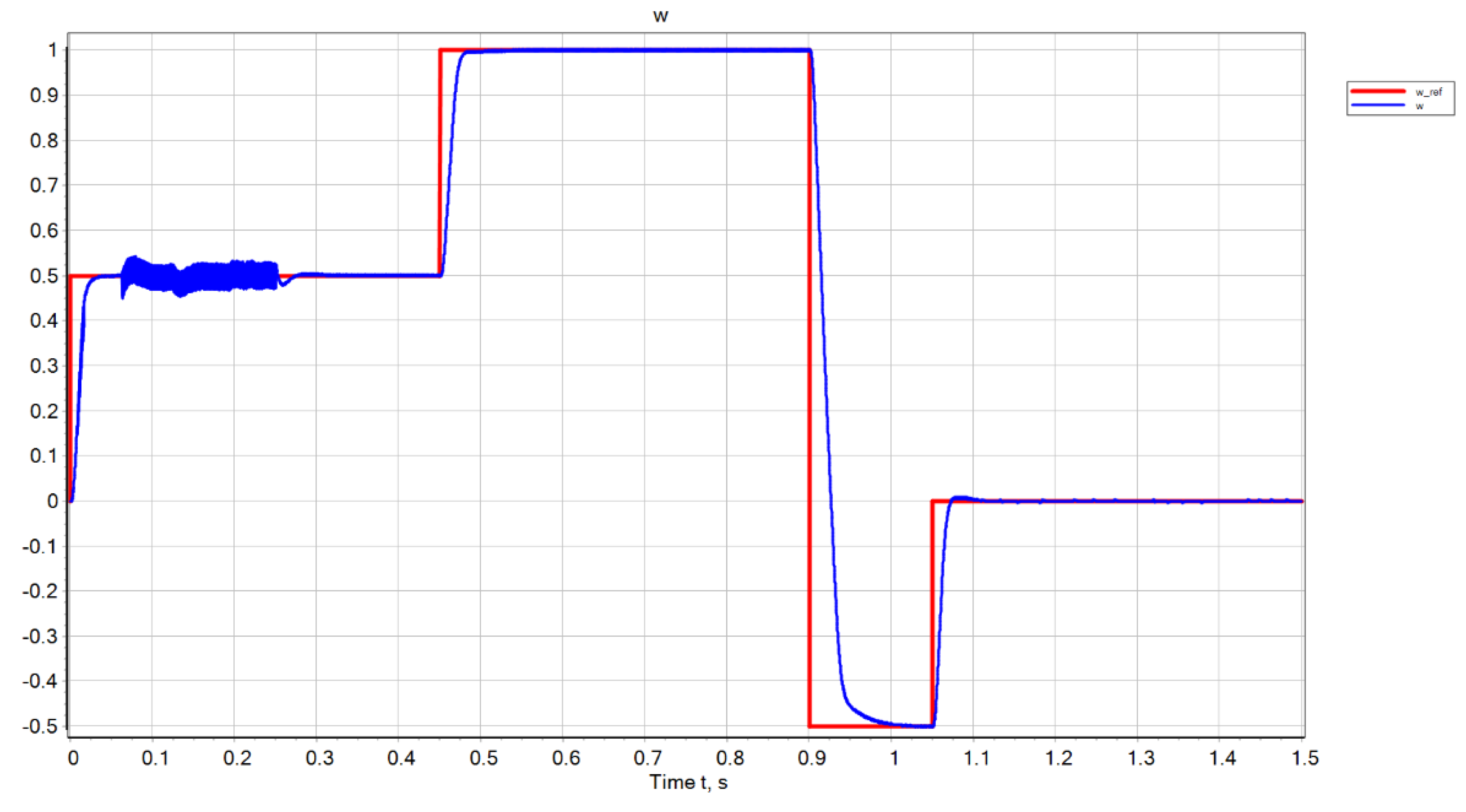
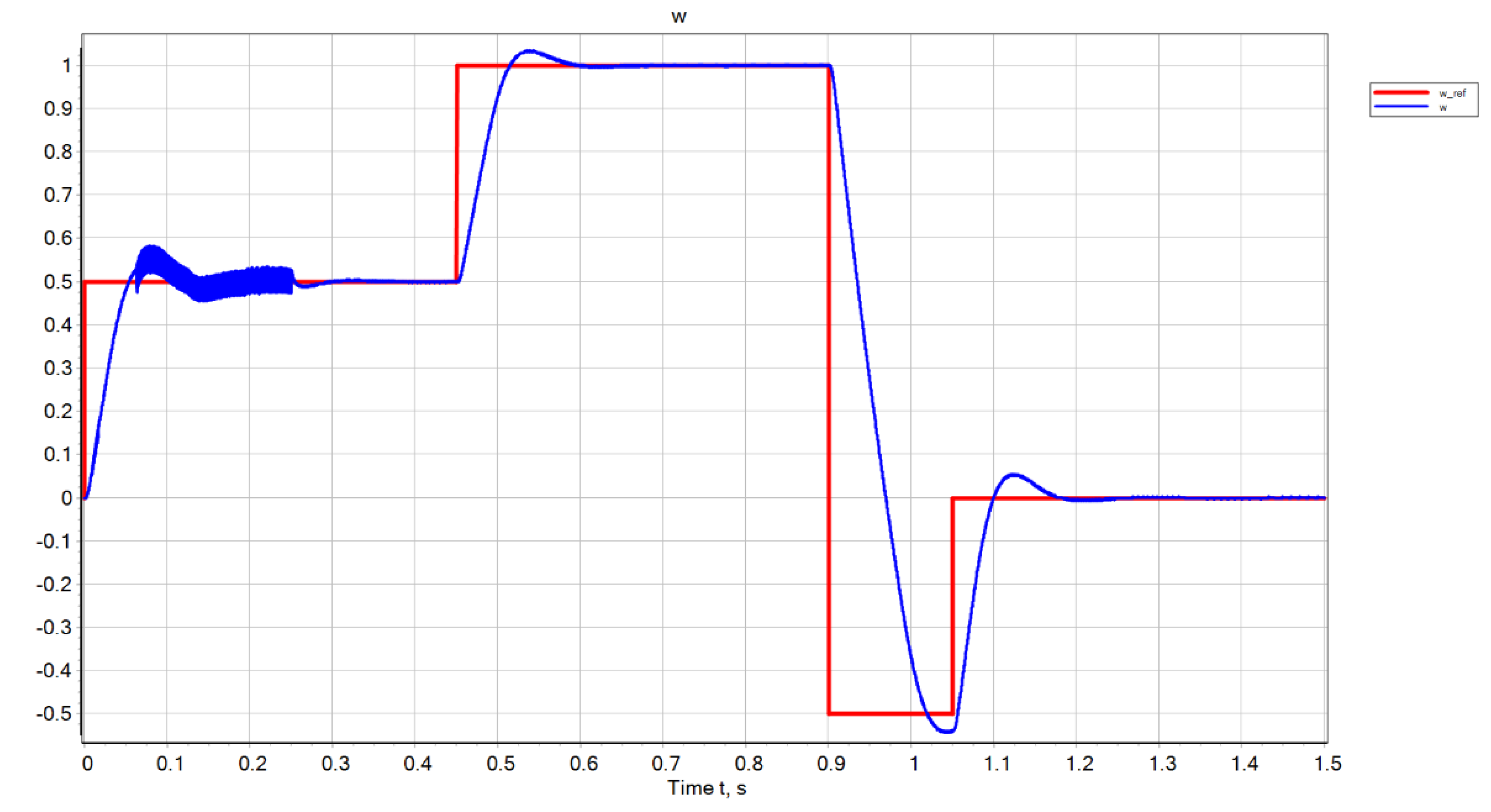
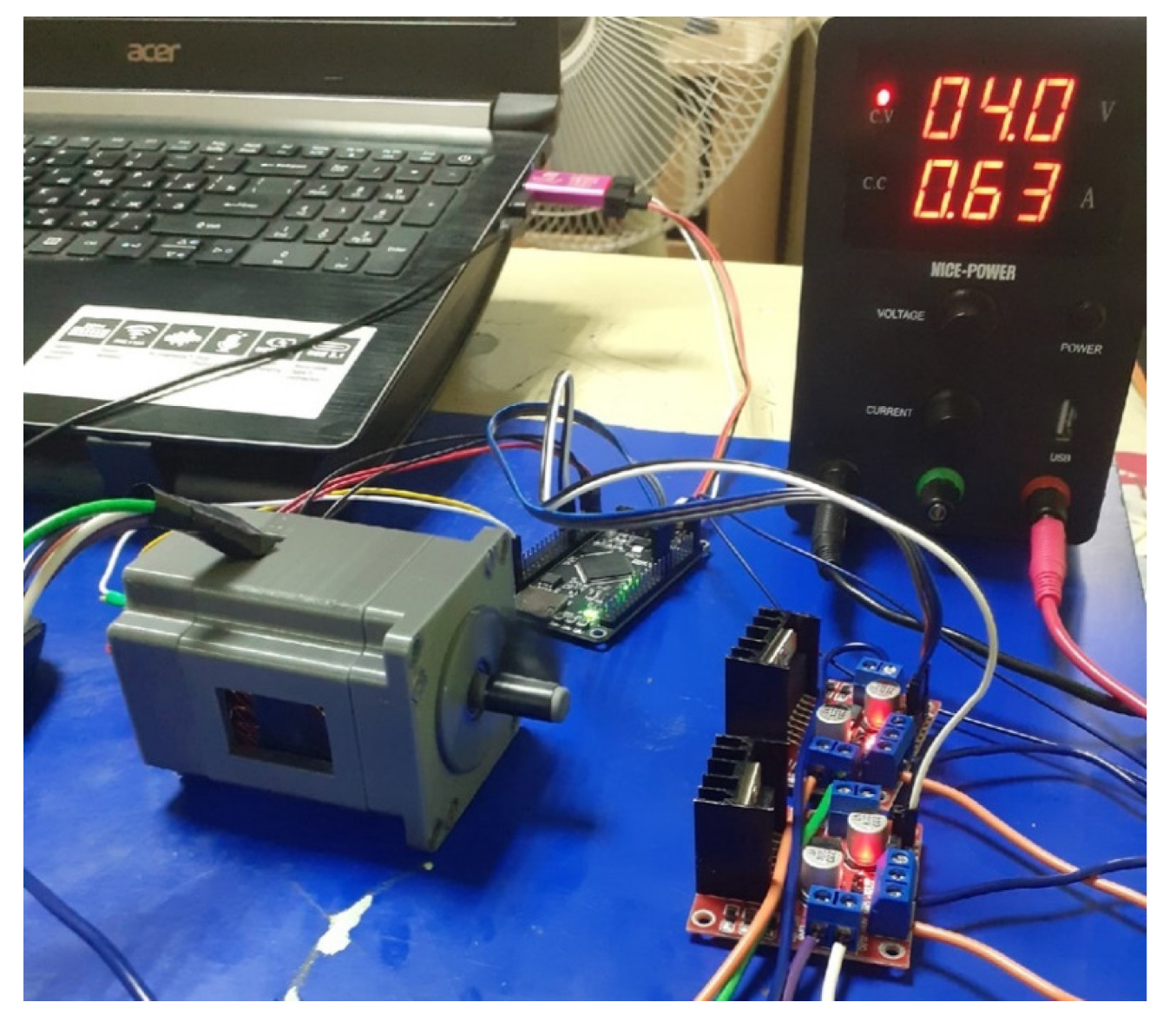
3. Results
4. Discussion
5. Conclusions
- -
- weight of the motor: 0.52 kg;
- -
- overall dimensions: 61 × 56 × 56 mm3;
- -
- nominal power: 55 Watts;
- -
- efficiency: 93%;
- -
- power supply voltage: 24 V;
- -
- rated current: 2.5 A;
- -
- nominal torque: 0.18 N∙m;
- -
- rated speed of rotation: 2960 rpm;
- -
- inertia moment of the rotor: 321∙10−7 kg∙m2.
- -
- All obtained parameters of the motor correspond to the technical specification.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Kumar, R.R.; Kumari, A.; Devi, P.; Chetri, C.; Kumar, K. Performance Characteristic Analysis of a Novel Dual Stator Carbon Fiber Frame Rotor Five-Phase Permanent Magnet Synchronous Motor for Electric Vehicles Application. In Proceedings of the 2020 IEEE International Conference on Power Electronics, Drives and Energy Systems (PEDES), Jaipur, India, 16–19 December 2020. [Google Scholar] [CrossRef]
- Zhao, J.; Liu, W.; Li, B.; Liu, X.; Gao, C.; Gu, Z. Investigation of Electromagnetic, Thermal and Mechanical Characteristics of a Five-Phase Dual-Rotor Permanent-Magnet Synchronous Motor. Energies 2015, 8, 9688–9718. [Google Scholar] [CrossRef]
- Tereshkin, V.M.; Grishin, D.A.; Tereshkin, V.V.; Balgazin, I.I. Seven-Phase Motor as an Alternative to Three-Phase Motor in Modern Electric Traction. New Russ. Electr. Power Ind. 2021, 1, 46–56. [Google Scholar]
- Tereshkin, V.M.; Aitov, I.L.; Grishin, D.A.; Tereshkin, V.V. Formation of the Resulting Vector of the Voltage of the Five-Phase Abcde Winding at the Temporary Sequence of Alternating the ACEBD Phases. 2019. Available online: https://elibrary.ru/download/elibrary_42305758_92805001.pdf (accessed on 28 July 2022).
- Virgala, I.; Frankovský, P.; Kenderová, M. Friction Effect Analysis of a DC Motor. Am. J. Mech. Eng. 2013, 1, 1–5. [Google Scholar] [CrossRef]
- Veszpremi, K.; Hunyar, M. New Application Fields of the PWM IGBT AC Chopper. In Proceedings of the 8th International Conference on Power Electronics and Variable Speed Drives, London, UK, 18–19 September 2000; pp. 46–51. [Google Scholar] [CrossRef]
- Salem, A.; Narimani, M. A Review on Multiphase Drives for Automotive Traction Applications. IEEE Trans. Transp. Electrif. 2019, 5, 1329–1348. [Google Scholar] [CrossRef]
- Božek, P.; Nikitin, Y. The Development of an Optimally-Tuned Pid Control for the Actuator of a Transport Robot. Actuators 2021, 10, 195. [Google Scholar] [CrossRef]
- Nikitin, Y. BLDC Motor Identification Based on Optimal Control Model in the State Space. IOP Conf. Ser. Mater. Sci. Eng. 2020, 971, 042063. [Google Scholar] [CrossRef]
- Bocko, J.; Delyová, I.; Frankovský, P.; Neumann, V. Lifetime Assessment of the Technological Equipment for a Robotic Workplace. Int. J. Appl. Mech. 2020, 12, 20500970. [Google Scholar] [CrossRef]
- Božek, P. Parametrical Synthesis of PID-Law Control Based on Continuous Model of Electric Cart Drive Based on Asynchronous Motor. Mechatron. Prod. Technol. Digit. Enterp. Latest Achiev. Chall. Trends. 2021, 1, 12–22. [Google Scholar]
- Lekomtsev, P.V.; Nikitin, Y.R.; Trefilov, S.A. DC Motor Identification Based on Quasi-Optimal Nonlinear Control Algorithm. Bull. IzhGTU Named M.T. Kalashnik 2021, 24, 68. [Google Scholar] [CrossRef]
- German-Galkin, S.G.; Lebedev, V.V.; Bormotov, A.V. Modular Synchronous Inductor Machine in the Electric Drive System. Mekhatronika Avtom. Upr. 2015, 16, 731–737. [Google Scholar] [CrossRef]
- Krasnodubets, L.A.; Oleynikov, A.M. PID Controller as a Platform for Implementation of the Adaptive Laws of the Electric Drive Control. Mekhatronika Avtom. Upr. 2016, 17, 809–816. [Google Scholar] [CrossRef]
- German-Galkin, S.G.; Gavrilov, R.S.; Mustafayev, Y.N. Structural and Simulation Models in the Model-Oriented Designing of the Electric Valve Actuator for a Rotary Support Device. Mekhatronika Avtom. Upr. 2017, 18, 56–63. [Google Scholar] [CrossRef]
- Liptak, T.; Virgala, I.; Frankovsky, P.; Sarga, P.; Gmiterko, A.; Balockova, L. A Geometric Approach to Modeling of Four- and Five-Link Planar Snake-like Robot. Int. J. Adv. Robot. Syst. 2016, 13, 1729881416663714. [Google Scholar] [CrossRef]
- Abramov, I.V.; Abramov, A.I.; Nikitin, Y.R.; Sosnovich, E.; Bozek, P.; Stollmann, V. Diagnostics of Electrical Drives. In Proceedings of the 2015 International Conference on Electrical Drives and Power Electronics (EDPE), Tatranska Lomnica, Slovakia, 21–23 September 2015; pp. 364–367. [Google Scholar]
- Peterka, J.; Nikitin, Y.R.; Božek, P. Diagnostics of Automated Technological Devices. MM Sci. J. 2020, 2020, 4027–4034. [Google Scholar] [CrossRef]
- Cisar, M.; Kuric, I.; Cubonova, N.; Zajacko, I.; Dodok, T.; Rudawska, A. Utilization of Educational Machine Tool for Training of Technical Diagnostics Based on Positioning Performance. In Proceedings of the XXII Slovak-Polish Scientific Conference on Machine Modelling And Simulations 2017 (MMS 2017), Sklené Teplice, Slovakia, 5–8 September 2017; Vasko, M., Handrik, M., Jakubovicova, L., Kopas, P., Blatnicka, M., Baniari, V., Stalmach, O., Sapietova, A., Saga, M., Eds.; University of Žilina, EDIS-Editing Centre of University of Žilina: Žilina, Slovakia, 2018; Volume 157. [Google Scholar]
- Nikitin, Y.; Božek, P.; Peterka, J. Logical–Linguistic Model of Diagnostics of Electric Drives with Sensors Support. Sensors 2020, 20, 4429. [Google Scholar] [CrossRef] [PubMed]
- Kuric, I.; Klackova, I.; Domnina, K.; Stenchlak, V.; Saga Jr, M. Implementation of Predictive Models in Industrial Machines with Proposed Automatic Adaptation Algorithm. Appl. Sci. 2022, 12, 1853. [Google Scholar] [CrossRef]
- Kalachev, Y.N. Modeling in Electric Drive; SimInTech: Moscow, Russia, 2019. [Google Scholar]
- Jakubowski, J.; Peterka, J. Design for Manufacturability in Virtual Environment Using Knowledge Engineering. Manag. Prod. Eng. Rev. 2014, 5, 3–10. [Google Scholar] [CrossRef]
- Peterka, J.; Pokorný, P. Influence of the Lead Angle from the Vertical Axis Milling on Effective Radius of the Cutter. Key Eng. Mater. 2014, 581, 44–49. [Google Scholar] [CrossRef]
- Beňo, M.; Zvončan, M.; Kováč, M.; Peterka, J. Circular Interpolation and Positioning Accuracy Deviation Measurement on Five Axis Machine Tools with Different Structures. Teh. Vjesn. Tech. Gaz 2013, 20, 479–484. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter Name | Parameter Designation | Parameter Value |
|---|---|---|
| Number of motor pole pairs | Zp | 42 |
| Stator phase resistance, Ohm | RS | 16 |
| Stator phase inductance, Hn | LS | 0.112 |
| Rotor current coefficient, Vb | F | 0.4 |
| Parameter Name | Parameter Designation | Parameter Value |
|---|---|---|
| Proportional coefficient | kp | 4 |
| Integral coefficient | ki | 150 |
| Parameter Name | Parameter Designation | Parameter Value |
|---|---|---|
| Proportional coefficient | kp | 4 |
| Integral coefficient | ki | 400 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kuric, I.; Nikitin, Y.; Sága, M.; Tlach, V.; Bannikov, A. Development of Electric Drive on the Basis of Five-Phase Synchronous Electric Motor. Electronics 2022, 11, 2680. https://doi.org/10.3390/electronics11172680
Kuric I, Nikitin Y, Sága M, Tlach V, Bannikov A. Development of Electric Drive on the Basis of Five-Phase Synchronous Electric Motor. Electronics. 2022; 11(17):2680. https://doi.org/10.3390/electronics11172680
Chicago/Turabian StyleKuric, Ivan, Yury Nikitin, Milan Sága, Vladimír Tlach, and Alexander Bannikov. 2022. "Development of Electric Drive on the Basis of Five-Phase Synchronous Electric Motor" Electronics 11, no. 17: 2680. https://doi.org/10.3390/electronics11172680