3.1. Deformation Mode
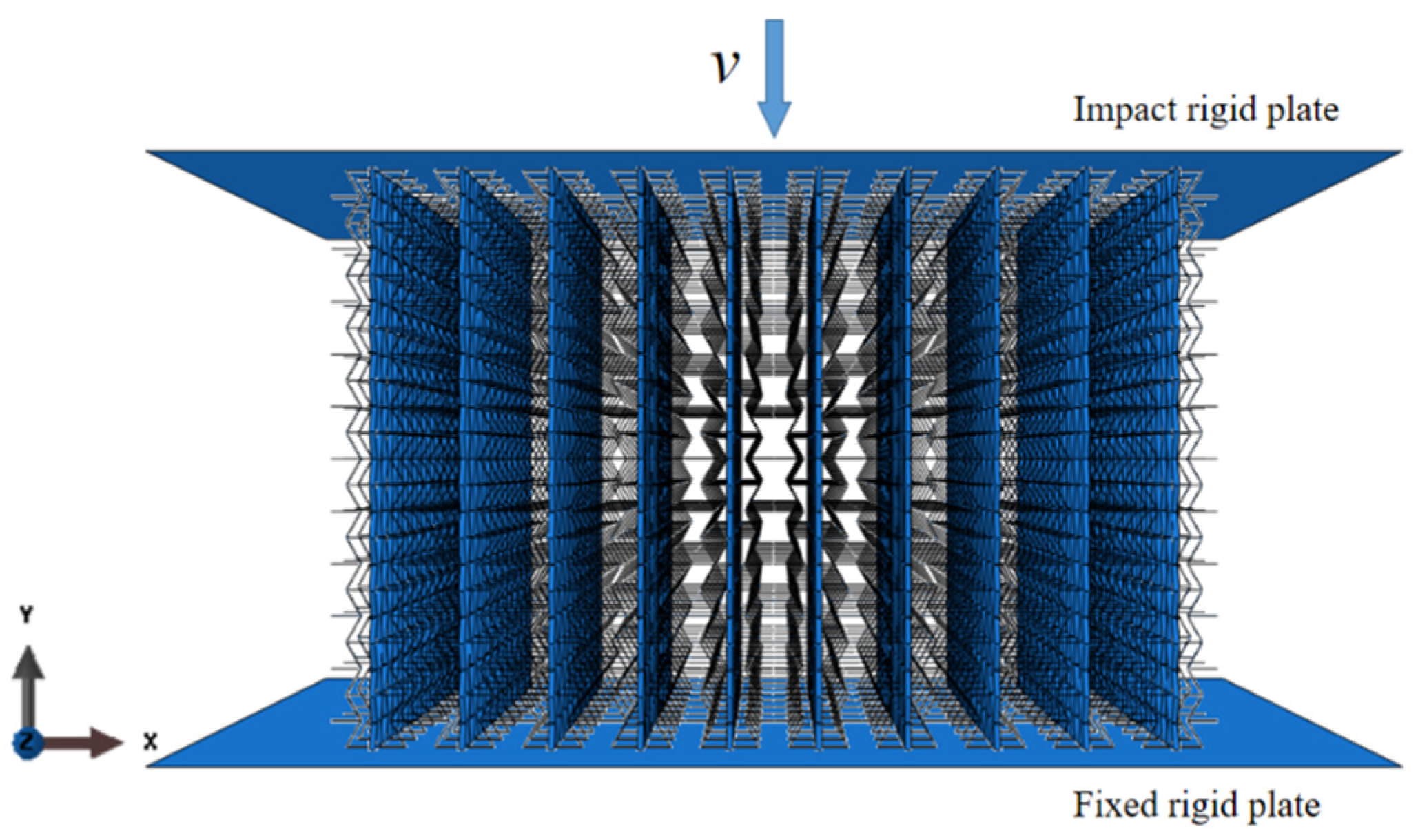
Under different impact velocities, the deformation of model is an important characteristic of the dynamic response of honeycomb. The reason for the deformation is that the wall of cell inside the specimen is rotation and buckling under external loads.
When the angle α is 45°, the deformation of the three-dimensional honeycomb under three different impact velocities of low speed (V
1 = 3 m/s), medium speed (V
2 = 20 m/s) and high speed (V
3 = 200 m/s) are shown in
Figure 7,
Figure 8 and
Figure 9, respectively. The nominal strain (ε) in the Figures is the ratio of the displacement of the specimen in
y-axis direction to the initial height.
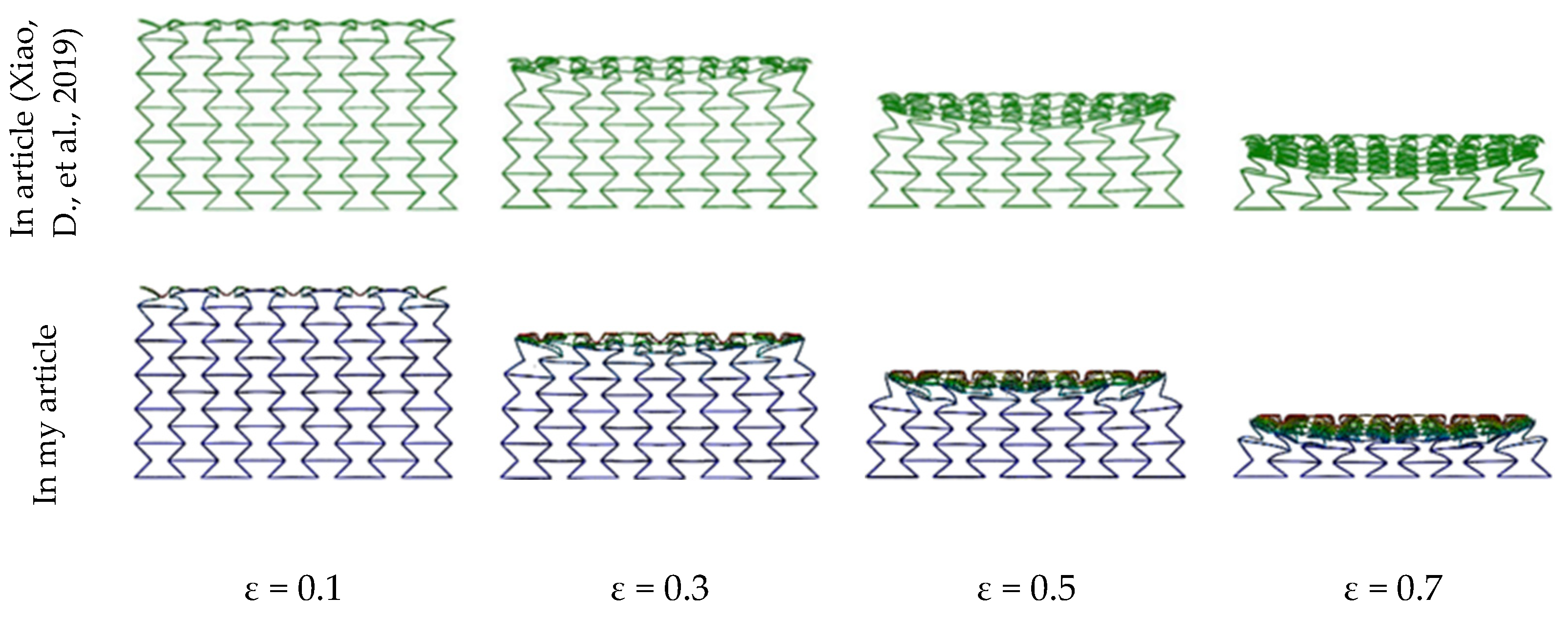
In the case of low velocity (V1 = 3 m/s), the deformation process of three-dimensional honeycomb can be roughly divided into four stages. Phase I (ε = 0.096) is mainly the rotation of the inclined cell wall inside the three-dimensional honeycomb. The results show that the more the impact velocity is close to the velocity of quasi-static compression, the more uniform the stress is in the compression process. The specimen is uniformly deformed all the time in this stage and the upper and lower ends are close to the middle under the action of the x-axis force generated by the rotation of the cell wall, which shows that the specimen has a specific negative Poisson’s ratio. The middle part of the specimen in the y-axis direction has little force and almost no deformation, so the middle part of the specimen is convex during compression. In Phase II (ε = 0.277), the deformation is mainly caused by the continuous rotation of the inclined cell wall in the upper structure of the specimen in order to withstand the compression deformation in the y-axis direction. Therefore, under the action of the cohesion in the x-axis direction, the upper end of the specimen has obvious concave phenomenon. When the upper end is compressed to a certain extent, it enters Phase III (ε = 0.470). The internal inclined cell wall of the upper end of the specimen will maintain a certain angle in the process. The pressure is transferred from the upper end of the specimen to the lower end, which leads to the rotation of the internal inclined cell wall of the lower end of the specimen. The cohesive force begins to contract to the middle, and the concave shape appears to bear the impact force transmitted from the upper end. When the upper and lower ends are basically symmetrical and the upper and lower ends of the specimen are concave and the middle part is convex, forming a ‘barreling’ state, this stage is completed. Then the deformation enters Phase IV (ε = 0.782), the specimen continues compressing in the y-axis direction. Because the upper and lower ends of the specimen have been compressed to a certain extent, the inclined cell wall of the middle part of the specimen in the y-axis direction will rotate. Under the action of transverse force in the x-axis direction, the inclined cell wall begins to converge to the middle vertical plane. When the inner cell wall of the structure basically parallel, the adjacent cell walls reach full contact density, and the compression is stopped.
In the case of medium velocity (V2 = 20 m/s), the deformation can be divided into two stages. The first stage includes the deformations where the strain is between 0 to 0.47. When ε = 0.096, the impact energy cannot be transmitted to the lower end of the specimen, resulting in the compression of the upper end of the specimen. The inclined cell wall begins to rotate inside the specimen. Because the impact velocity is higher than the one at low speed, the horizontal cell wall will produce buckling and the external impact energy is absorbed. Due to the rotation and buckling of the inner cell wall of the specimen structure, the upper part of the specimen will produce an obvious concave deformation, where negative Poisson’s ratio characteristics are shown. When ε = 0.277 and ε = 0.470, the deformation still presents in the first stage. The specimen is compressed layer by layer from top to bottom. In the second stage (ε = 0.782), the compression of the specimen is passed layer by layer to the lower of the specimen, and the internal cell walls begin to contact each other and produce dense compression. At this stage, the bottom layer of the specimen cannot bear the force in the x-axis direction due to the lessened friction force, so there is a slight rollover phenomenon.
At high speeds (V3 = 200 m/s), the compression deformation can be seen as one stage. The inertia effect plays a leading role due to the fast impact speed. The inclined cell wall in the specimen structure cannot produce rotation and only buckling deformation occurs. The specimen is compressed layer by layer from upper to lower, until the compression reaches to the bottom and the inner cell wall of the structure is fully contacted and dense. Negative Poisson’s ratio can be hardly shown in this process.
It can be concluded that when the speed is low, the whole specimen is more evenly deformed from top to bottom. Due to the effect of friction, when the speed is low, the specimen presents ’barreling’. With the speed increases, this phenomenon gradually disappears, inertial force plays a major role, the specimen deforms from the upper end and the bottom deformation becomes smaller.
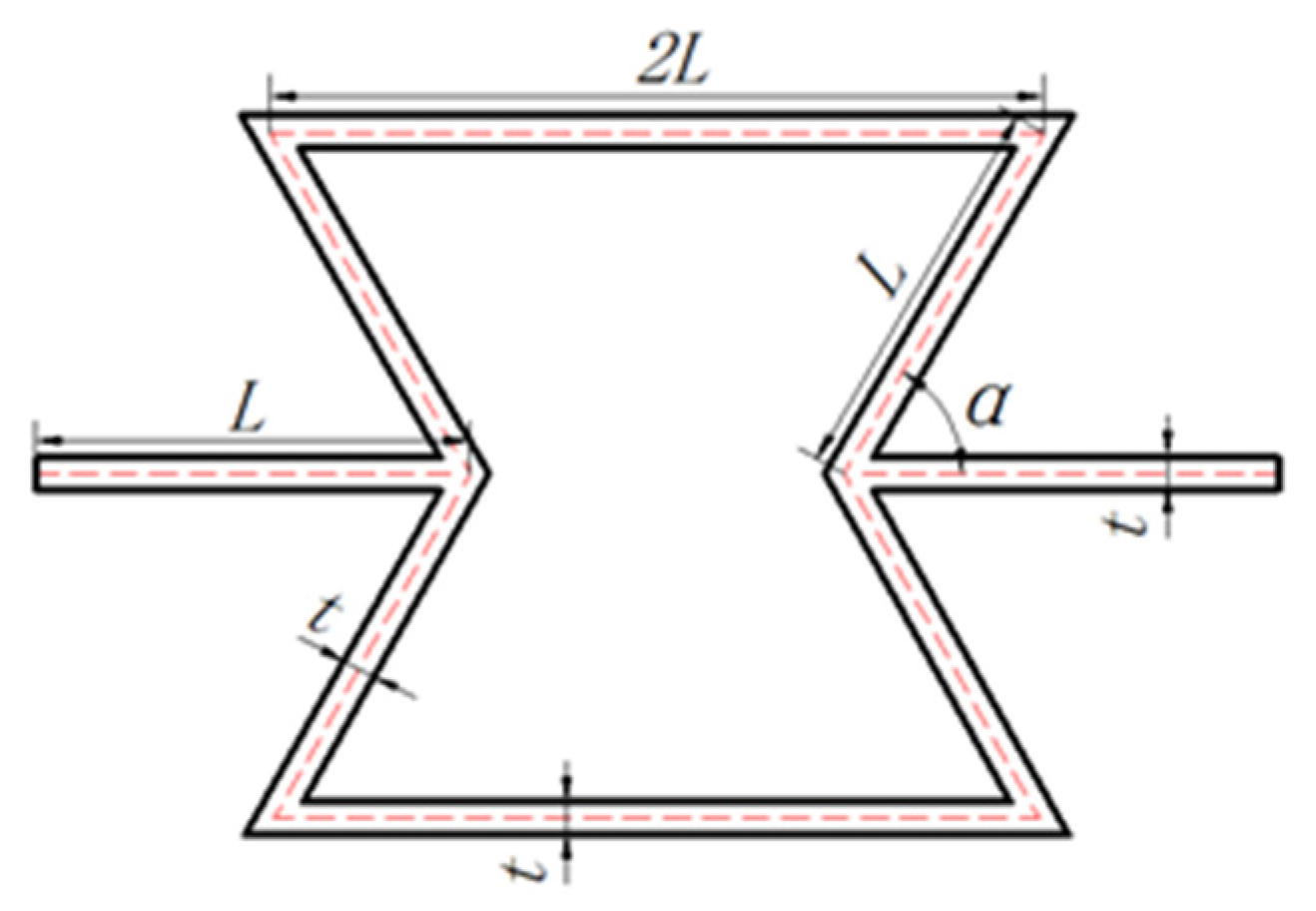
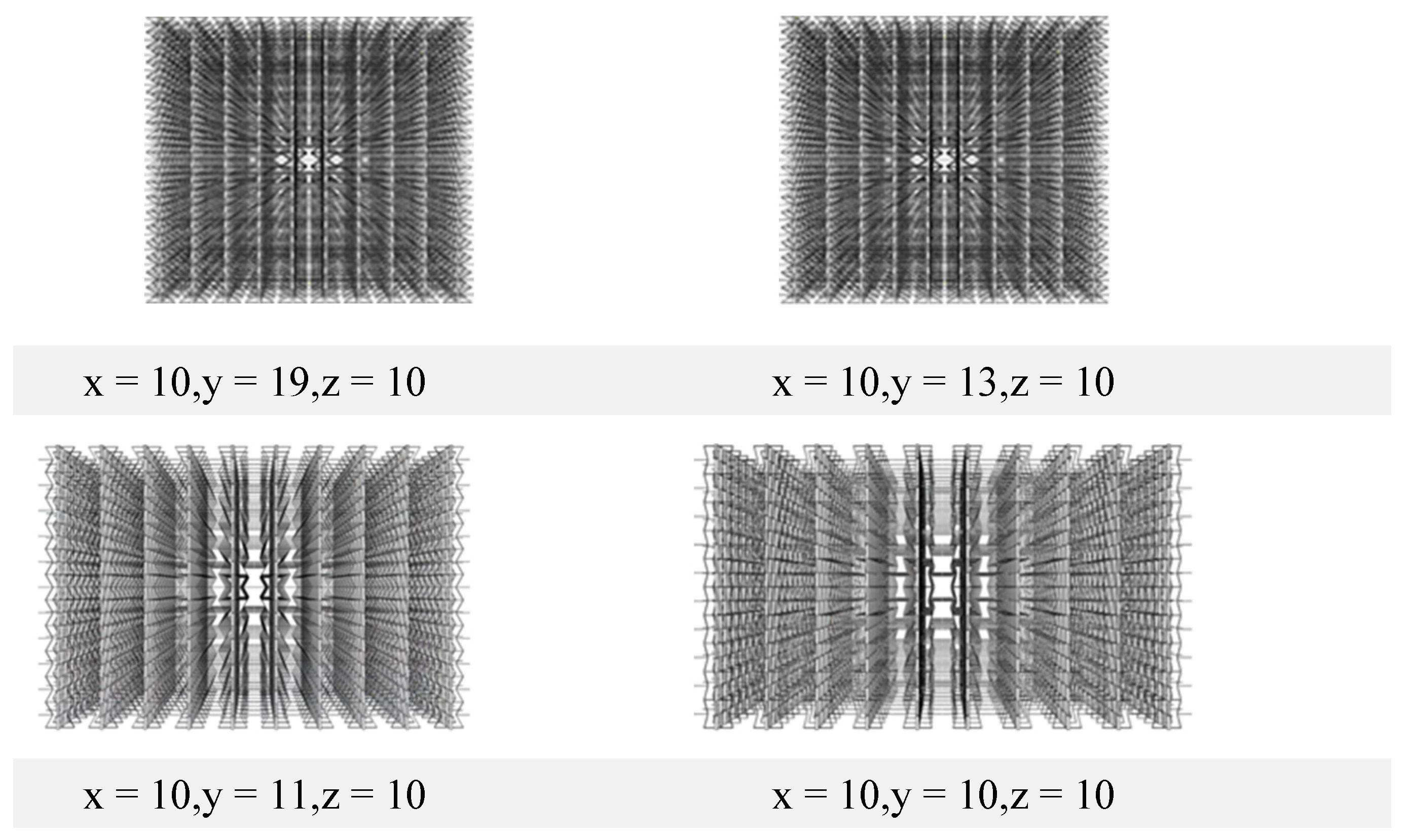
The above research discusses the influence of different impact velocities on the deformation of specimen at the same cell angle. The deformations of specimen with different cell angles under the same impact velocity is discussed next. In the test, the cell wall length L = 5 mm is unchanged, the impact velocity is 3 m/s and the compression deformation is set as ε = 0.186. The deformation of specimens with different cell angles α = 30°, 45°, 60° and 70° are shown in
Figure 10a–d, respectively.
When the cell angle α = 30°, the impact energy is first transferred from the upper of the specimen to the lower. Shrinkage deformations in the vertical direction are produced in the middle part. The shrinkage deformation of the lower part of the specimen is greater than that of the upper part of the specimen. The deformation mode of this case is that the deformation is small near the upper end and the deformation is great next to the lower end.
When the cell angle is α = 45°, the impact energy is also transferred from the upper to the lower of the specimen. In the process of the compression deformation of the specimen, due to the rotation of the inclined cell wall inside the specimen, the transverse deformation in the x-axis direction is produced. Both ends of the specimen shrink and the middle position of the y-axis direction is relatively small, so it finally presents the ‘barreling’ mode.
When the cell angle is α = 60°, the impact energy is transferred from the upper to the lower parts of the specimen. In the process of compression deformation, the situation is basically the same as that of α = 45°, so it finally presents the ‘barreling’ state. Compared with α = 45°, the deformation at the lower part of the specimen is smaller, and the deformation is mainly concentrated in the upper part of the specimen.
When the cell angle α = 75°, the internal cell wall of the specimen is sparser due to the larger angle of α. When the impact begins from the upper part of the specimen, it shows that the upper part of the specimen is prone to deformation, while the lower part does not produce deformation. A specific position at the upper part of the specimen shows the necking phenomenon, and the specimen has obvious negative Poisson’s ratio characteristics.
By studying the impact deformation of different cell angles under the same impact velocity, it is found that when the cell angle α = 30°, the deformation of the negative Poisson’s ratio mainly occurs at the lower part of the specimen, and the deformation morphology is different from that with other angles where the lower shrinkage is larger than the upper shrinkage. When the cell angle is α = 45° and α = 60°, the deformation modes are basically the same, showing the shape of ‘barreling’. Besides the phenomenon of negative Poisson’s ratio still exists at the upper and lower ends of the specimen. However, with the increase of the cell angle, the deformation at the lower part of the specimen gradually weakens and mainly concentrates on the upper part of the specimen. When the cell angle is α = 75°, the upper end of the specimen displays an obvious ‘necking’ phenomenon, and the lower end almost has no deformation. It can be concluded that under the same impact velocity, with the increase of the cell angle, the deformation position gradually transits from the lower of the specimen to the upper end and shows different deformation modes.
When the impact velocity is low (V
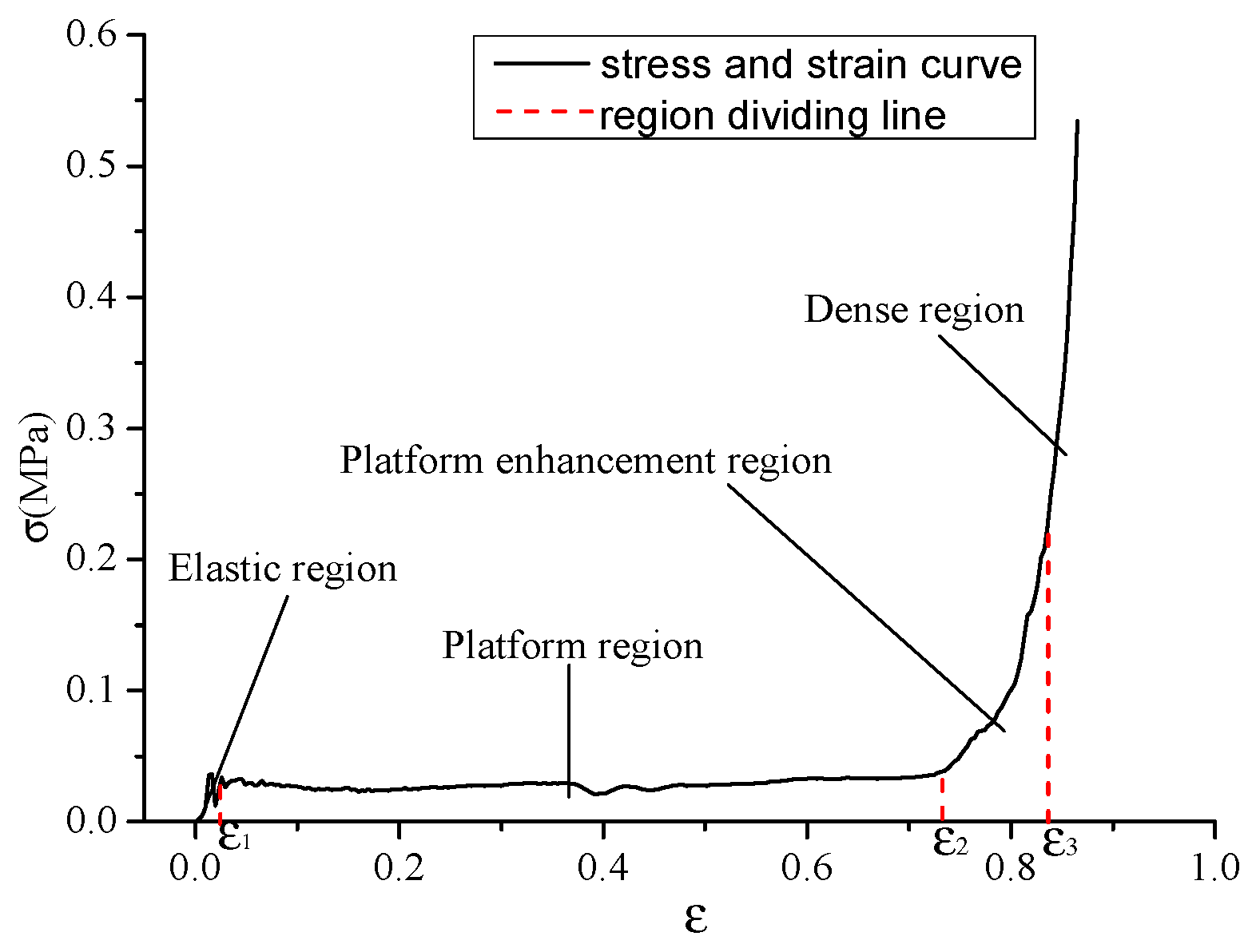
1 = 3 m/s), the nominal stress–strain curve of the specimen is shown in
Figure 11. When the three-dimensional honeycomb parameters are α = 45°, L = 5 mm and t = 0.3 mm, the ε represents the nominal strain in the horizontal coordinate, that is, the ratio of the compression reaction of the upper rigid plate to the initial contact area of the specimen, and the σ represents the nominal stress in the vertical coordinate.
When honeycomb is subjected to in-plane compression, it is studied according to [
25]. The compression process of traditional honeycomb is generally divided into three regions, as shown in
Figure 11, which are the linear elastic region, platform region and dense region. However, compared with the traditional honeycomb, the compression process of the three-dimensional re-entrant honeycomb is divided into four regions, namely, the linear elastic region, platform region, platform enhancement region and dense region.
The linear elastic region is a process, where the compression stress of the upper rigid plate suddenly increases and reaches the initial stress peak in a very short time. After that (ε = ε1), the stress begins to fluctuate and finally tends to be stable. In the platform region, the compressive stress of the specimen after reaching the initial strain ε1 fluctuates around a certain value and remains relatively stable. The specimen undergoes great compressive deformation in this stage, so it is the main stage of energy absorption. After the end of the platform stage, it enters the platform enhancement region. With the continuous increase of the compressive strain of the specimen, the stress no longer remains relatively stable, but gradually increases with a specific slope and exceeds the platform stress value to a certain extent. After the strain at the end of the enhancement stage reaches ε3, the cells in the specimen begin to contact with each other in dense region. At this region, the stress value of the specimen rises sharply in a small strain stage until the inner wall of the cells in the specimen is completely bonded together and the dense stage ends.
3.2. Platform Stress
When the stress remains in a relatively stable region from
ε1 to
ε2, the stress in this region is called the platform stress (
σp). It is an important indicator for describing the dynamic response characteristics of the honeycomb and can be calculated by the following Formulas (4) and (5):
In Formula (4), ε1 is the initial strain, that is, the corresponding strain value when the initial stress is just stable and reaches the platform stress, so the value of ε1 is very small. In order to achieve a high calculation accuracy, the value of ε1 in this paper is set as 0.013. ε3 is dense strain, that is, the strain corresponding to the contact between adjacent cell walls within the specimen. In Formula (5), the value of F(ε) is derived from the average value of the force of the upper rigid plate in the platform area obtained by the simulation. Lx is the length of the specimen in the x-axis direction, and Lz is the length of the specimen in the z-axis direction.
According to the one-dimensional shock wave theory [
1,
25], the formula of platform stress is obtained as follows:
where
σs represents the yield stress of the matrix material, Δ
ρ represents the relative density of the designed honeycomb material,
ρs represents the density of the matrix material and
m and
n are the coefficients to be calculated or fitted.
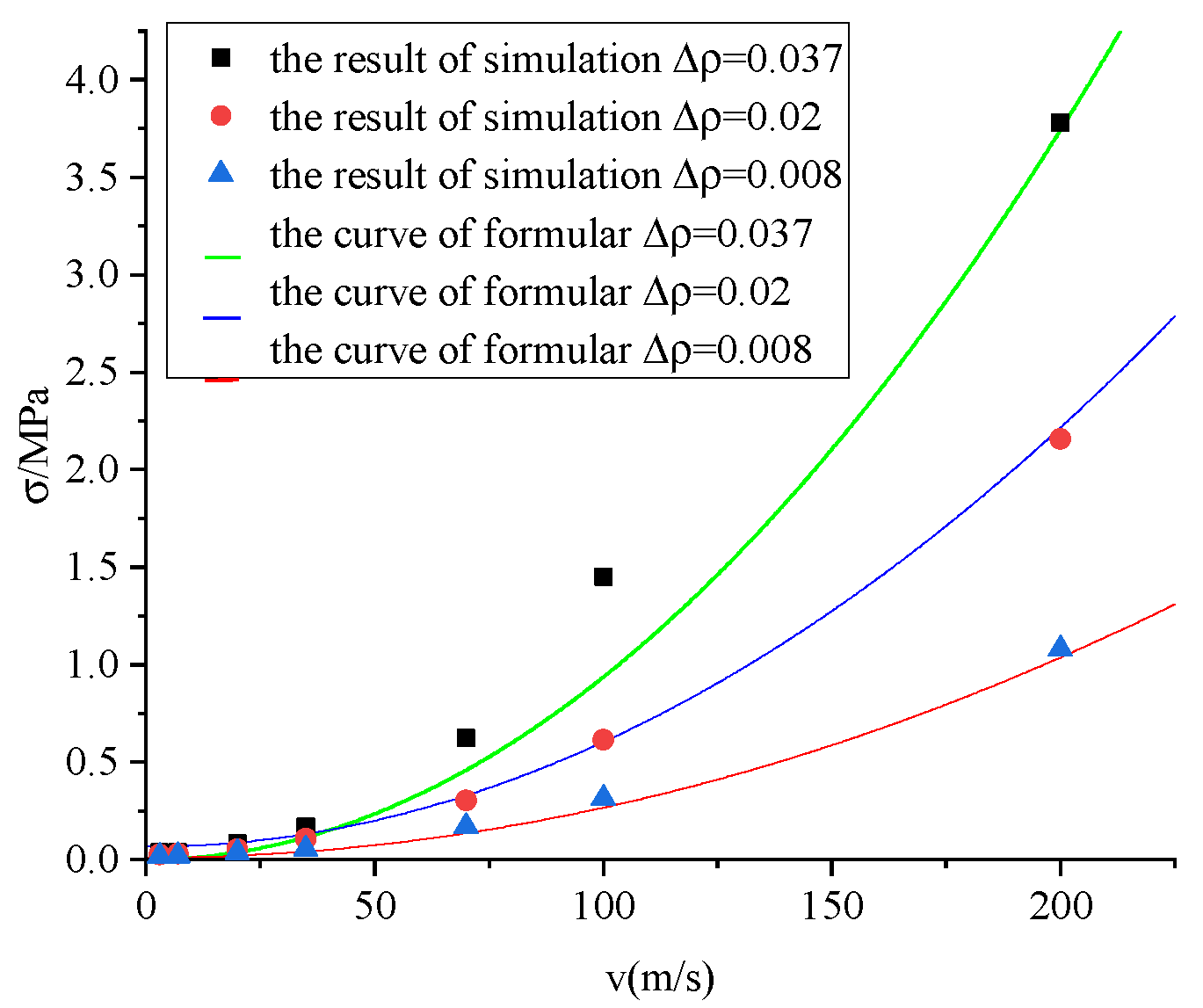
The stress over different velocities are calculated using the FEM method and listed in
Table 2. According to Formula (6) and the data points in
Table 2, three curves are fitted and plotted in
Figure 12, and the formula of the three curves are obtained by linear regression, so as to solve the parameters
m and
n in the formula. By verifying the results, it has been found that the value of
n is too large, mainly because the value of ρs in the formula leads to the inapplicability of the formula. It is found that the value of
n conforms to the linear distribution by observation, so the calculation formula of platform stress is modified by fitting the value of
n again. The modified formula is as follows:
The comparison between the results of the three-dimensional honeycomb platform stress under different densities by FEM and the curves of the formula are shown in the
Figure 12 as well. It can be seen that the fitting of the result is better, and the smaller the relative density is, the higher the fitting degree is. Therefore, the rationality of the correction formula is verified.
3.3. Energy Absorption
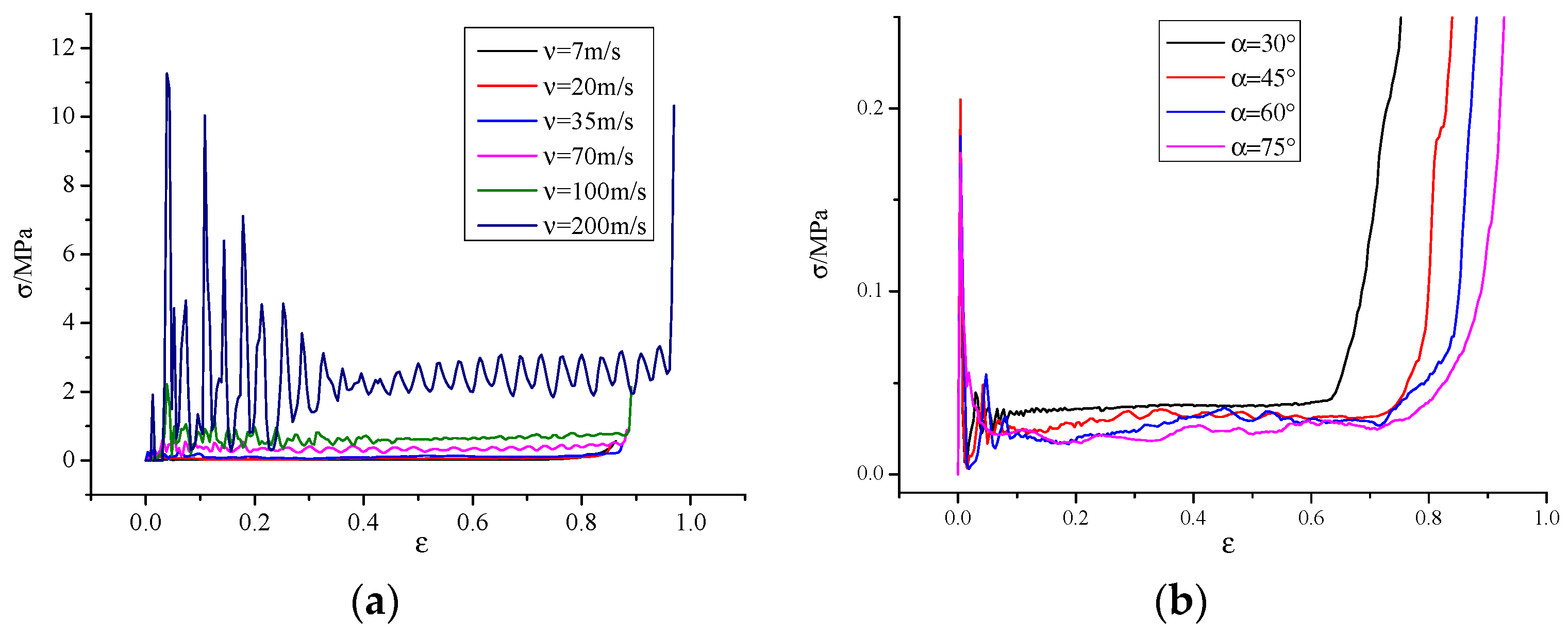
The effects of the impact velocity and cell angle on the stress and strain of specimen during impact are studied below. Firstly, under the condition of the constant cell angle (relative density), the nominal stress and strain curves of three-dimensional re-entrant honeycomb are obtained by simulation. It can be concluded from
Figure 13a that under this condition, the stress increases with the increase of velocity. In addition, the stress and strain of different cell angles (different densities) under the same impact velocity can be obtained in
Figure 13b. It can be seen from
Figure 13b, the stress decreases with the increase of the cell structure angle.
Energy follows the first principle of thermodynamics under external loads, which can be expressed by Formula (8). Ignoring the energy of friction loss and the energy of the damping dissipation of surrounding media in Formula (8), the external work is mainly converted into kinetic energy and the internal energy absorbed by the impact object, so the sum of the two is regarded as the total energy absorbed by the material.
where
Eu is the internal energy of the material,
Ek is the kinetic energy of the material,
Ef is the energy of the contact friction loss,
Ew is the work done by the external load and
Eqb is the energy dissipated by the surrounding medium damping.
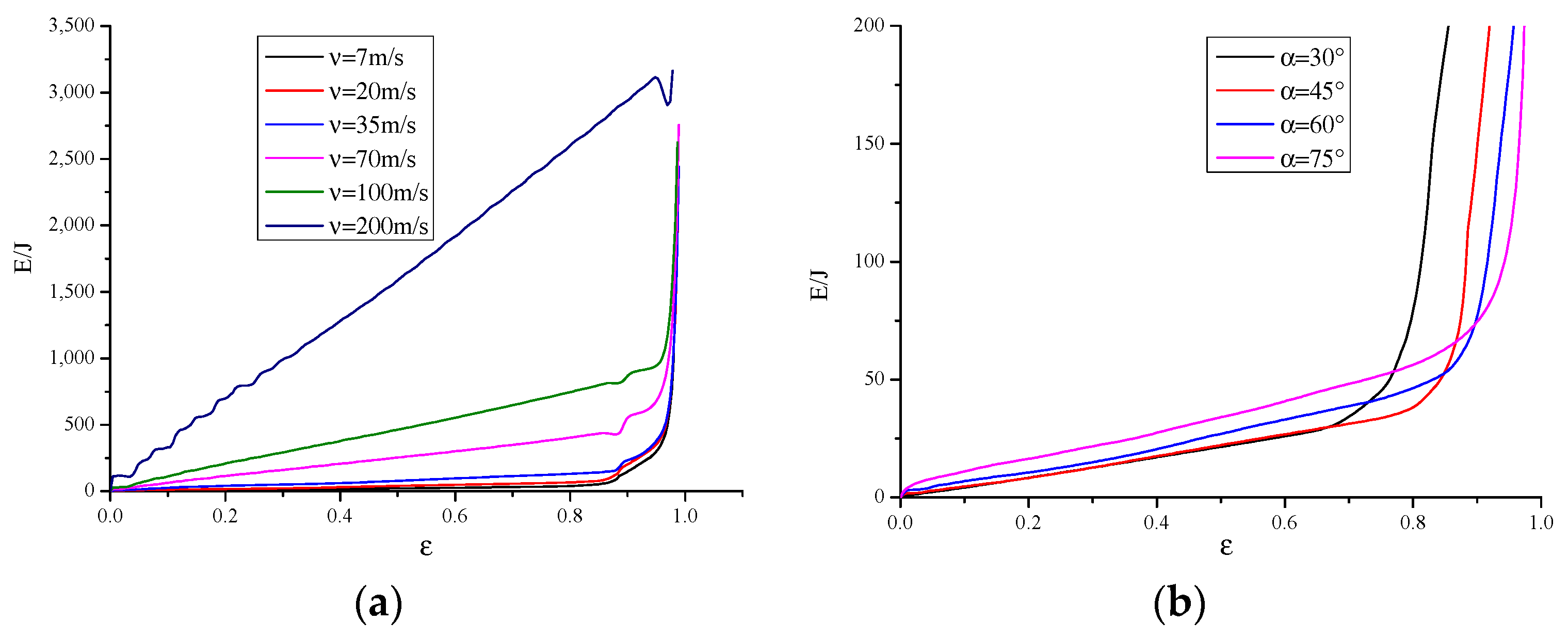
The curve of total energy over strain is shown in
Figure 14.
Figure 14a shows that when the cell angle (relative density) unchanged, the ability to absorb energy during compression increases with the increase of velocity. In addition, when the velocity is constant (V
1 = 3 m/s), the ability to absorb energy increases with the increase of cell angle shown
Figure 14b. Therefore, the energy absorption ability of three-dimensional honeycomb can be improved by changing the impact velocity and cell angle.
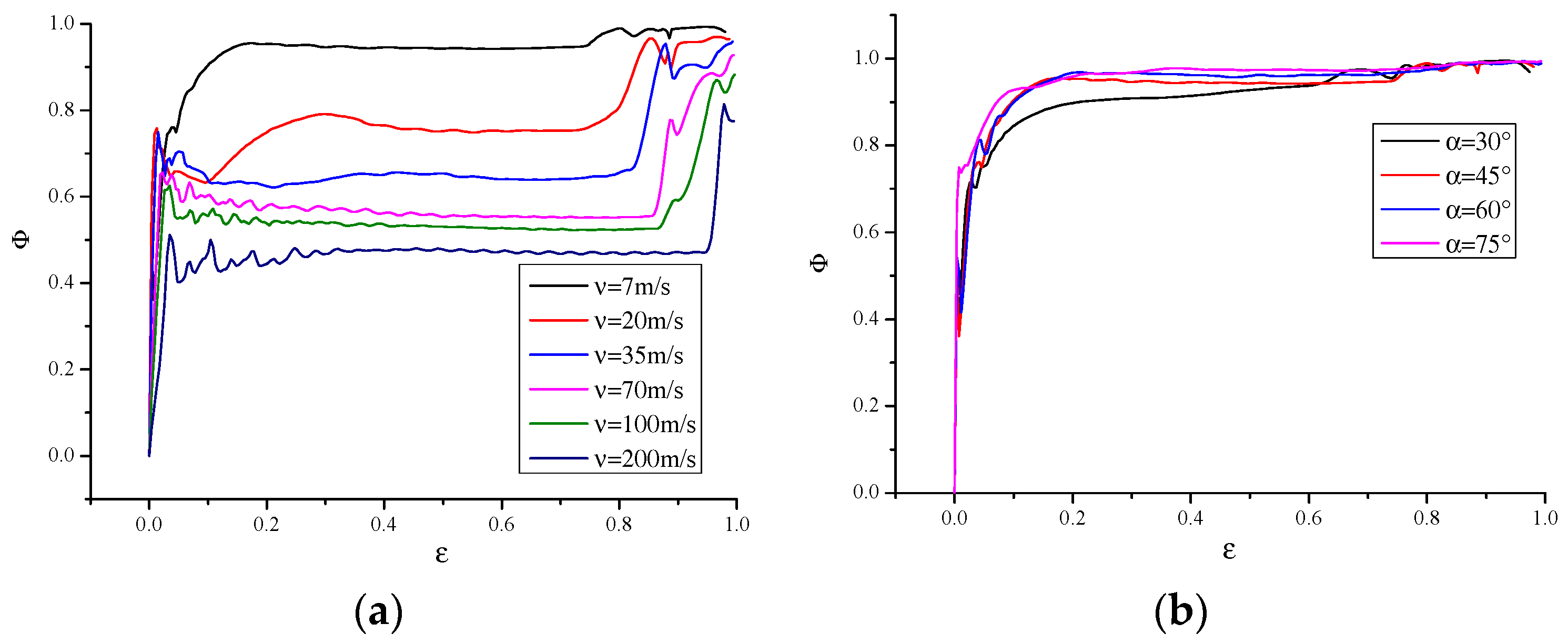
In order to investigate the energy absorption distribution of three-dimensional honeycomb structure under in-plane impact, the internal energy distribution coefficient Φ (the proportion of internal energy in total absorbed energy) is defined. The formula is as follows:
The influence of impact velocity and cell angle on the internal energy distribution coefficient Φ during the impact of specimen is studied below. The variation of the internal energy distribution coefficient Φ with the nominal strain is shown in
Figure 15. The condition that relative density (cell angle) of the honeycomb is constant and the impact velocity is different in
Figure 15a. The result show that the impact velocity has a great influence on the internal energy distribution coefficient Φ. With the increase of the impact velocity, the internal energy distribution coefficient Φ decreases accordingly, and its value gradually decreases from 0.95 at a low speed impact (V = 7 m/s) to 0.45 at a high speed impact (V = 200 m/s). It can be concluded that when the impact velocity is lower than the second critical impact velocity, the honeycomb absorbs most of the internal energy. With the increase of impact velocity, the proportion of internal energy distribution decreases due to the increase of inertial effect. In addition, when the impact velocity (V = 3 m/s) is constant and the relative density (cell angle) changes, the internal energy distribution coefficient Φ also depends on the cell angle, as shown in
Figure 15b. Under the same impact velocity, the internal energy distribution coefficient Φ increases slightly with the increase of cell angle. It can be concluded that the effect of impact velocity on the absorption of impact energy is greater than the cell angle.


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}