
New Sliding Mode Control Based on Tracking Differentiator and RBF Neural Network

Abstract
:1. Introduction
2. System Modelling
3. Design of New Sliding Mode Control Method
3.1. Design of a New Approach to Law
3.2. Design of a New Sliding Mode Speed Controller Based on RBF Neural Network
3.3. Fastest Tracking Differentiator
4. Algorithm Simulation and Result Analysis
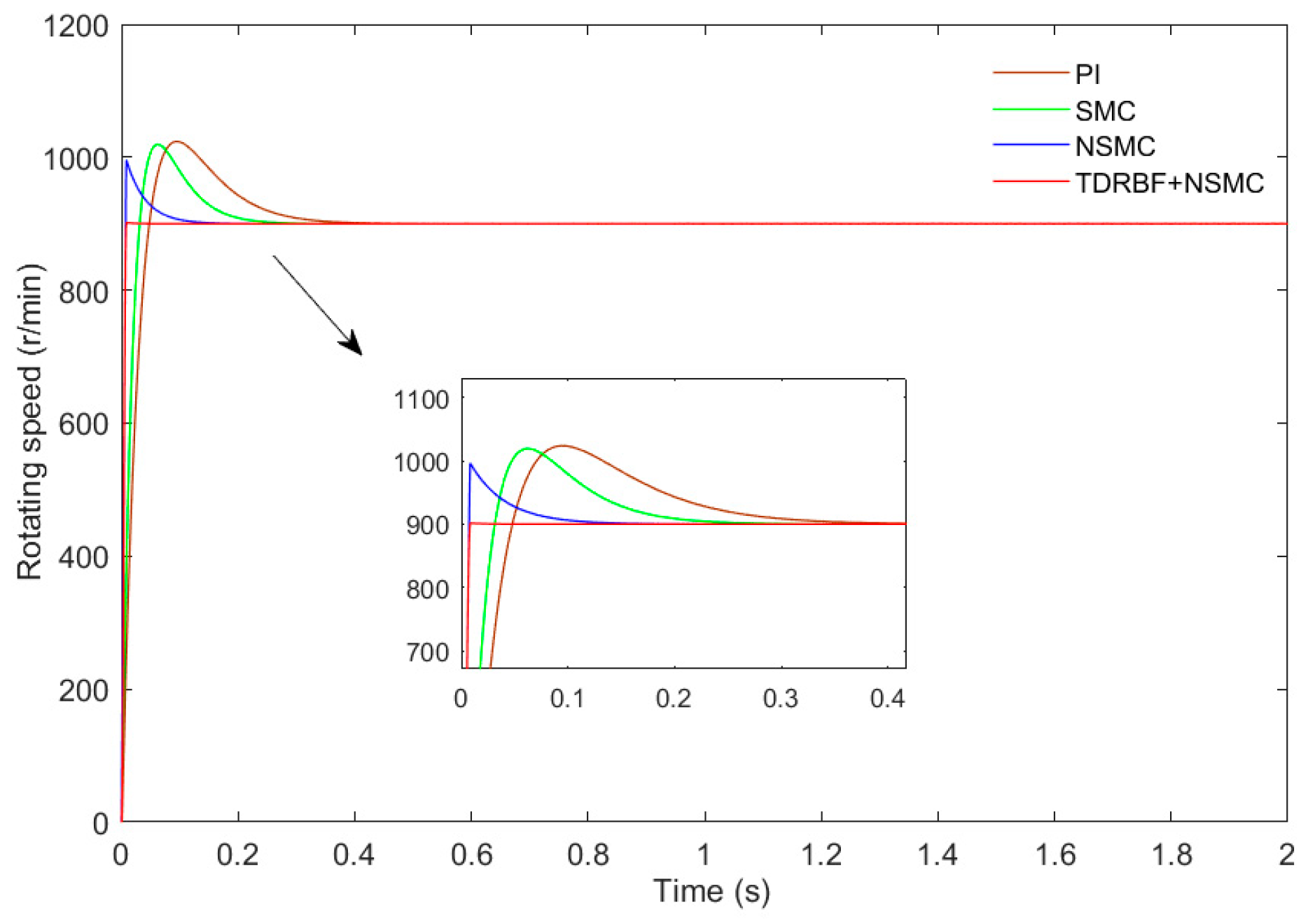
- The simulation running time is 2 s, the initial motor speed is 900 r/min, and the PMSM is started with a constant load of 10 N∙m. In order to better compare with traditional control, the PI, SMC (based on the traditional exponential approach to law), NSMC, and NSMC methods based on the TD and RBF neural network are used in this paper. The motor speed curve with three control methods is shown in Figure 5.
- 2.
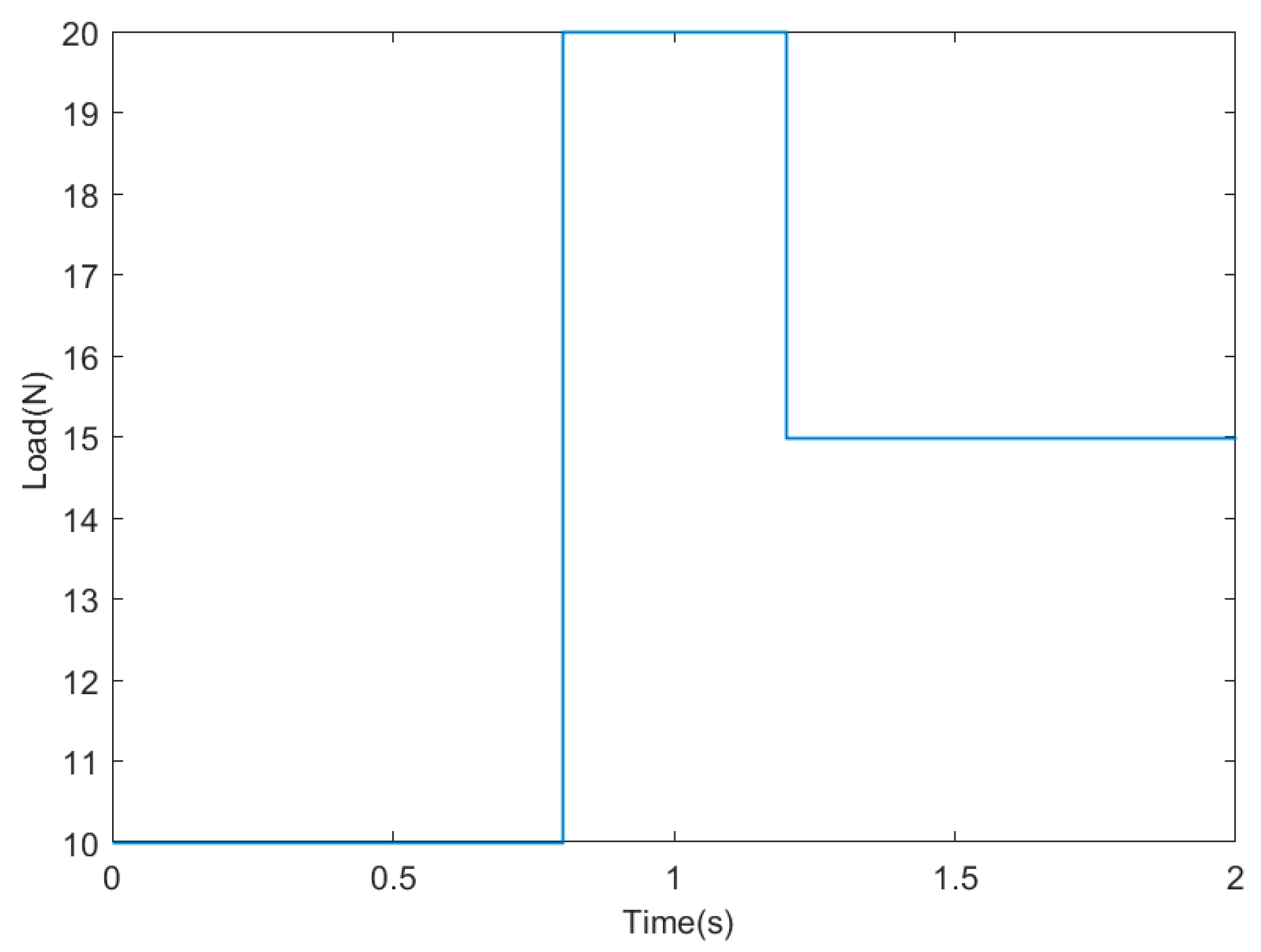
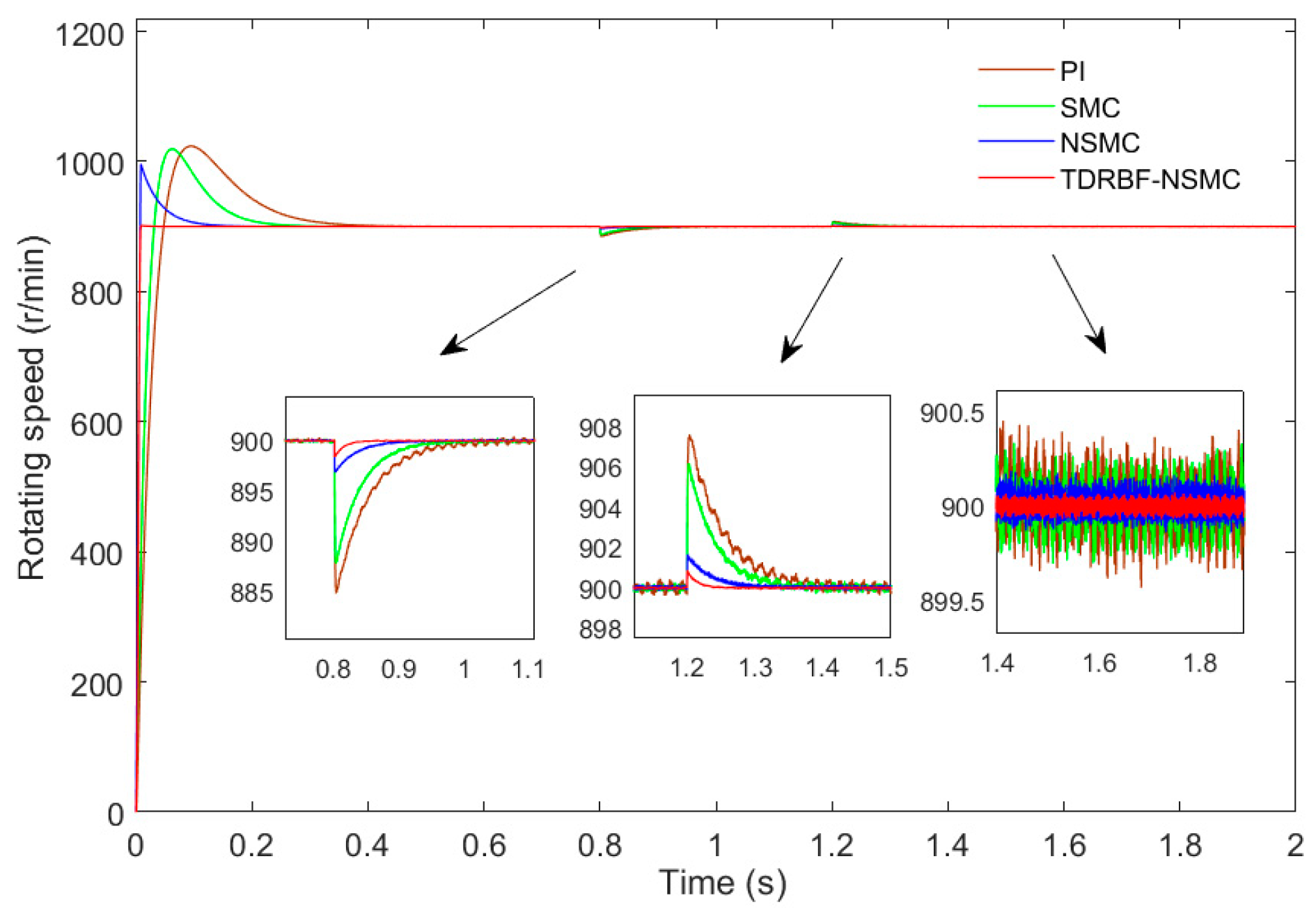
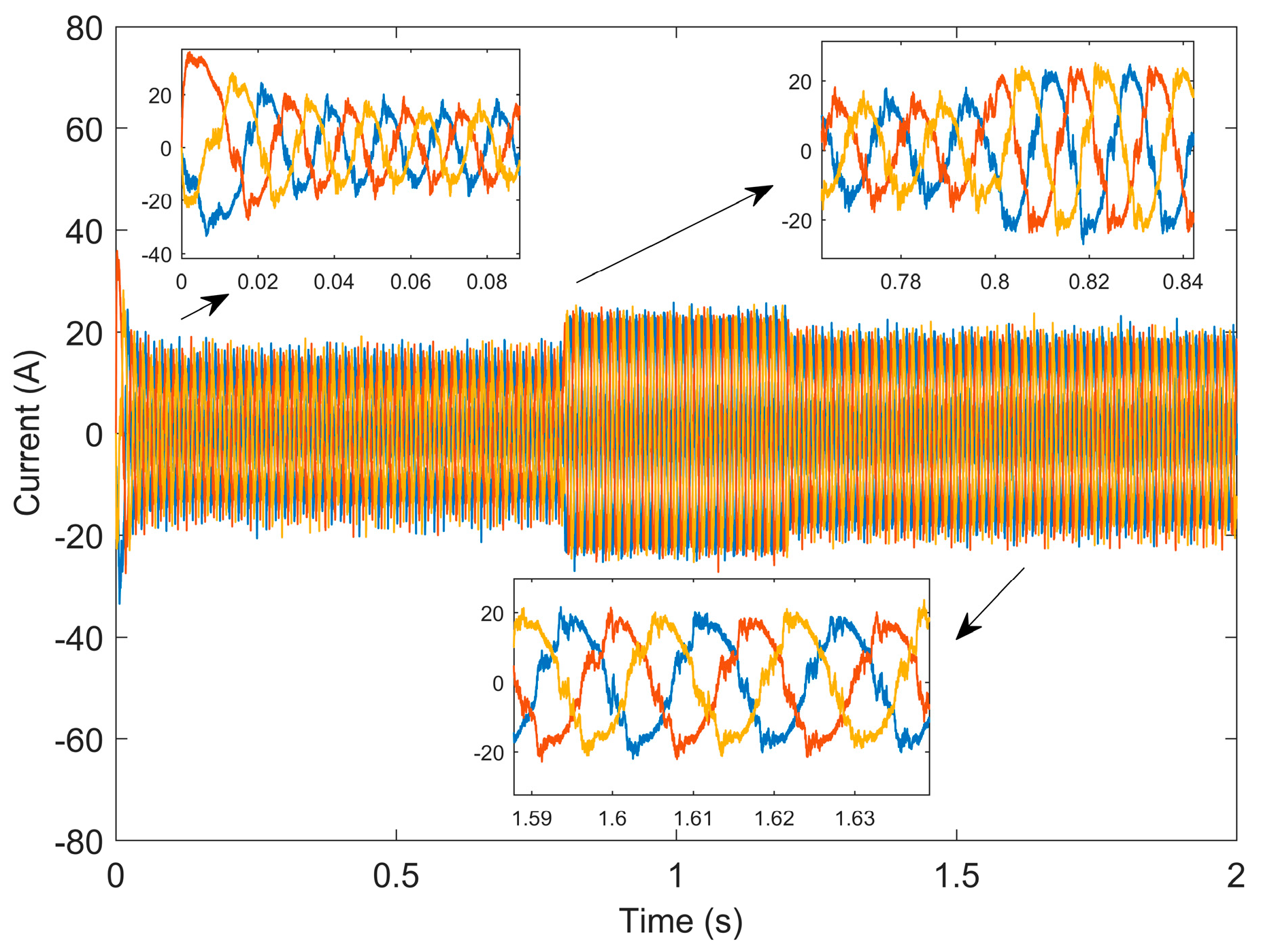
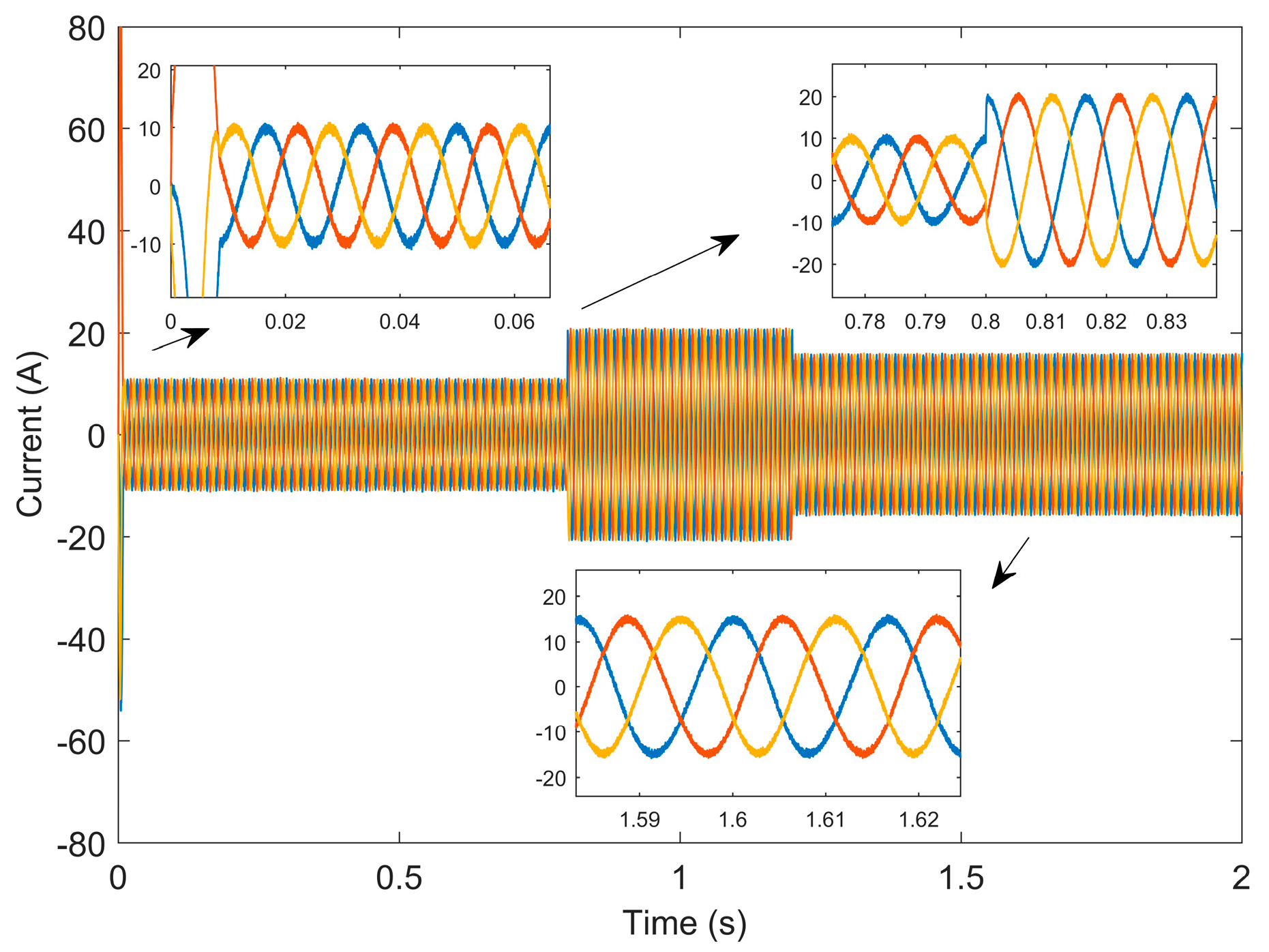
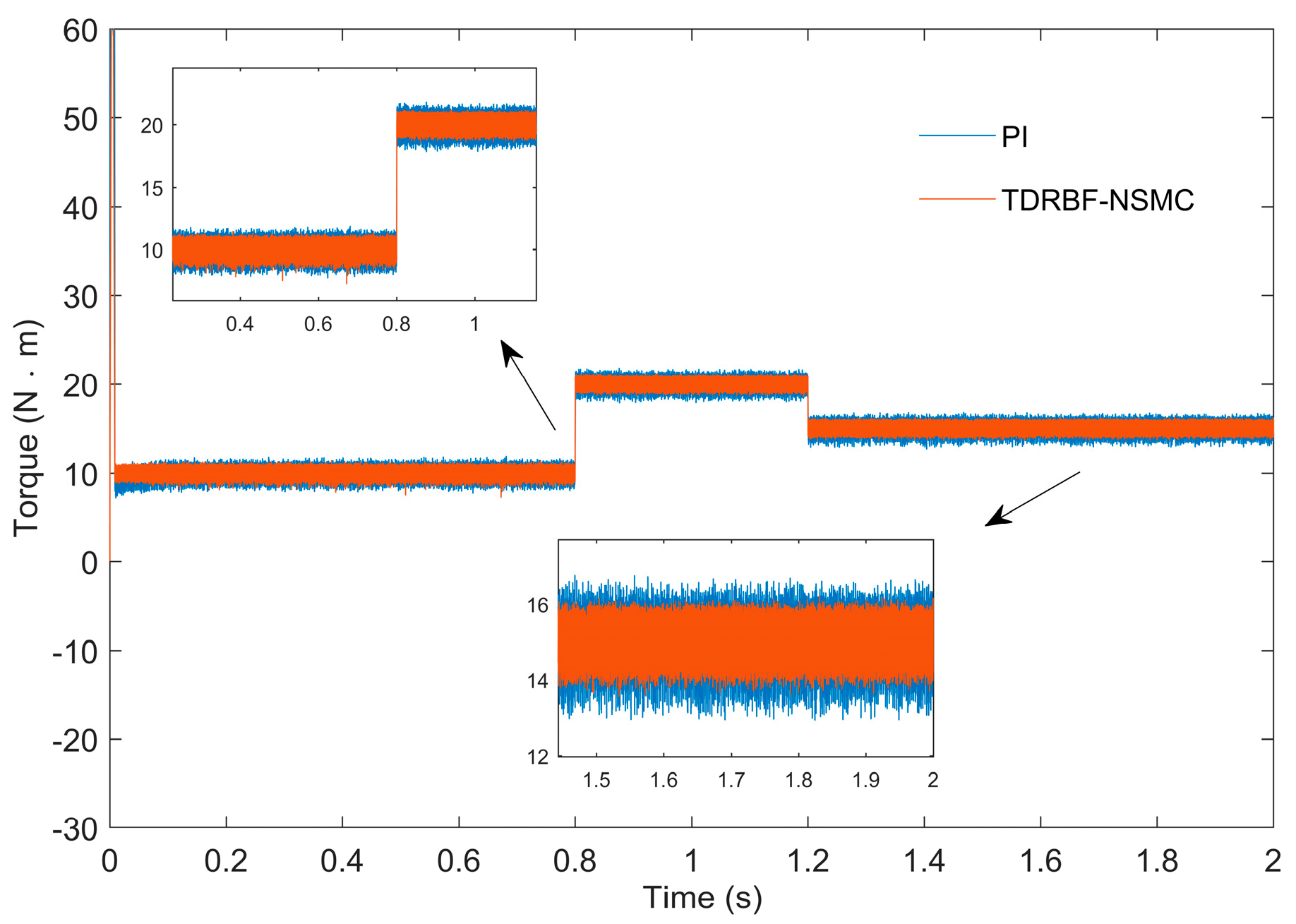
- To verify the response speed and tracking ability of the new control method in the presence of load disturbance when the load disturbance exists. The simulation running time is 2 s, the initial speed of the electrode is 900 r/min, the PMSM is started when the load is 10 N∙m, and the load is suddenly increased to 20 N∙m in 0.8 s, runs to 1.2 s, and suddenly reduces the load to 15 N∙m. The load variation curve is shown in Figure 6. The comparison of the motor speed curves using the four control methods is shown in Figure 7.
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Yu, P.; Wang, S.; Yang, J.; Zhang, Y.; Xue, H.; Huang, K. Adaptive reverse thrust robust control strategy for permanent magnet synchronous motor based on gray wolf optimization. Power Syst. Prot. Control 2021, 49, 39–46. [Google Scholar]
- Liu, Z.; Miao, S.; Li, W.; Liu, J. Control of Permanent Magnet Synchronous Motor Sensorless Based on Super-twisting Sliding Mode Observer. J. Northeast. Univ. Nat. Sci. 2020, 41, 741–746. [Google Scholar]
- Wu, J.; Wu, H. Current Disturbance Compensation Sensorless Control of Permanent Magnet Synchronous Motor. Electr. Mach. Control 2020, 24, 80–86+95. [Google Scholar]
- Pan, F.; Yan, G.; Yuan, W.; Qin, G.; Yu, Y. Based on double sliding model of permanent magnet synchronous motor direct torque control. Trans. China Electrotech. Soc. 2018, S2, 427–433. [Google Scholar]
- Wang, W.; Wu, J.; Zhang, Y.; Wei, H.; Ge, H. Permanent magnet synchronous motor fuzzy self-tuning adaptive step integral inverse control. Trans. China Electrotech. Soc. 2020, 35, 724–733. [Google Scholar]
- Chang, X.; Liu, L.; Cui, R. Non-singular fast terminal variable boundary layer sliding mode control of permanent magnet synchronous motor. J. Xi’an Jiaotong Univ. 2015, 49, 53–59. [Google Scholar]
- Gandikot, G.; Dushmanta, K.D. Terminal sliding mode disturbance observer based adaptive super twisting sliding mode controller design for a class of nonlinear systems. Eur. J. Control 2021, 1, 232–241. [Google Scholar]
- Nguyen, T.H.; Nguyen, T.T.; Nguyen, V.Q.; Le, K.M.; Tran, H.N.; Jeon, J.W. An Adaptive Sliding-Mode Controller with a Modified Reduced-Order Proportional Integral Observer for Speed Regulation of a Permanent Magnet Synchronous Motor. IEEE Trans. Ind. Electron. 2022, 69, 7181–7191. [Google Scholar] [CrossRef]
- Alnami, H.; Pang, C.; Wang, Q. A Novel Sliding Mode Control Method of Interior-Mounted PMSM. In Proceedings of the 2021 IEEE Texas Power and Energy Conference (TPEC), College Station, TX, USA, 2–5 February 2021; pp. 1–6. [Google Scholar]
- Zhao, F.; Luo, W.; Gao, F.; Yu, J. Improved sliding mode control of permanent magnet synchronous motor considering sliding mode buffeting and disturbance compensation. J. Xi’an Jiaotong Univ. 2020, 54, 28–35. [Google Scholar]
- Heidarpoor, S.; Tabatabaei, M.; Khodadadi, H. Speed control of a DC motor using a fractional order sliding mode controller. In Proceedings of the 2017 IEEE International Conference on Environment and Electrical Engineering and 2017 IEEE Industrial and Commercial Power Systems Europe (EEEIC/I&CPS Europe), Milan, Italy, 6–9 June 2017; pp. 1–4. [Google Scholar]
- Zhang, X.; Sun, L.; Zhao, K.; Sun, L. Nonlinear Speed Control for PMSM System Using Sliding-Mode Control and Disturbance Compensation Techniques. IEEE Trans. Power Electron. 2013, 28, 1358–1365. [Google Scholar] [CrossRef]
- Shah, P.; Ubare, P.; Ingole, D.; Sonawane, D. Performance Improvement of BLDC Motor Speed Control Using Sliding Mode Control and Observer. In Proceedings of the 2021 International Symposium of Asian Control Association on Intelligent Robotics and Industrial Automation (IRIA), Goa, India, 20–22 September 2021; pp. 247–252. [Google Scholar]
- Kashif, M.; Murshid, S.; Singh, B. Adaptive SMC Based DTC of Position Sensorless PMSM Driven Solar PV Water Pumping System. In Proceedings of the 2018 2nd IEEE International Conference on Power Electronics, Intelligent Control and Energy Systems (ICPEICES), Delhi, India, 22–24 October 2018; pp. 765–770. [Google Scholar]
- Rascón, R.; Rosas, D.I.; Rodríguez-Quiñonez, J.C. Robust Continuous Control for a Class of Mechanical Systems Based on Nonsingular Terminal Sliding Mode. IEEE Access 2020, 8, 19297–19305. [Google Scholar] [CrossRef]
- Zhang, H.; Bu, R.; Yu, G. RBF neural network sliding mode control for ship path tracking. J. Shanghai Marit. Univ. 2021, 42, 7–11. [Google Scholar]
- Tang, H.; Zhao, W. Research on parameter self-learning sliding mode control of permanent magnet synchronous motor. Electr. Mach. Control Appl. 2016, 43, 1–7. [Google Scholar]
- Van, M. An Enhanced Robust Fault Tolerant Control Based on an Adaptive Fuzzy PID-Nonsingular Fast Terminal Sliding Mode Control for Uncertain Nonlinear Systems. IEEE/ASME Trans. Mechatron. 2018, 23, 1362–1371. [Google Scholar] [CrossRef]
- Hu, Q.; Wang, Z.; Cao, L.; Zhang, J. Research on Improved Reaching Law Sliding Mode Control of Permanent Magnet Synchronous Motor Based on Fuzzy Neural Network Optimization. J. Chongqing Jiaotong Univ. Nat. Sci. 2022, 41, 139–144. [Google Scholar]
- Lawal, M.O. Tomato detection based on modified YOLOv3 framework. Sci. Rep. 2021, 11, 1447. [Google Scholar] [CrossRef] [PubMed]
- Wu, Z.; Xun, P.; Su, H. Research on the control of a naval gun loading mechanism based on RBF neural network adaptive sliding mode control technology. J. Gun Launch Control 2022, 43, 56–61. [Google Scholar]
- Roy, A.M. Adaptive transfer learning-based multiscale feature fused deep convolutional neural network for EEG MI multiclassification in brain–computer interface. Eng. Appl. Artif. Intell. 2022, 116, 105347. [Google Scholar] [CrossRef]
- Oliveira, T.R.; Estrada, A.; Fridman, L.M. Global and exact HOSM differentiator with dynamic gains for output-feedback sliding mode control. Automatica 2017, 81, 156–163. [Google Scholar] [CrossRef]
- Rodrigues, V.H.P.; Oliveira, T.R. Global Adaptive HOSM differentiators via monitoring functions and hybrid state-norm observers for output feedback. Int. J. Control 2018, 91, 2060–2072. [Google Scholar] [CrossRef]
- Liu, J. RBF Neural Network Control for Mechanical Systems: Design, Analysis and Matlab Simulation; Tsinghua University Press: Beijing, China, 2018; pp. 106–111. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| The Parameter | Value |
|---|---|
| 0.0918 | |
| 0.1688 | |
| 0.000975 | |
| 0.000975 | |
| 4 | |
| 0.003945 | |
| 0.0004924 |
| Compare the Item | PI | SMC | NSMC | TDRBF-NSMC |
|---|---|---|---|---|
| Overshoot volume/% | 13.67 | 12.87 | 10.67 | 0.17 |
| Speed decrease/% | 1.67 | 1.44 | 0.33 | 0.17 |
| Speed recovery time/s | 0.26 | 0.223 | 0.116 | 0.043 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Qu, C.; Hu, Y.; Guo, Z.; Han, F.; Wang, X. New Sliding Mode Control Based on Tracking Differentiator and RBF Neural Network. Electronics 2022, 11, 3135. https://doi.org/10.3390/electronics11193135
Qu C, Hu Y, Guo Z, Han F, Wang X. New Sliding Mode Control Based on Tracking Differentiator and RBF Neural Network. Electronics. 2022; 11(19):3135. https://doi.org/10.3390/electronics11193135
Chicago/Turabian StyleQu, Chunyu, Yongzhuang Hu, Ziqi Guo, Fangxu Han, and Xiuping Wang. 2022. "New Sliding Mode Control Based on Tracking Differentiator and RBF Neural Network" Electronics 11, no. 19: 3135. https://doi.org/10.3390/electronics11193135