
Design of Automatic Correction System for UAV’s Smoke Trajectory Angle Based on KNN Algorithm


Abstract
:1. Introduction
2. Materials and Methods
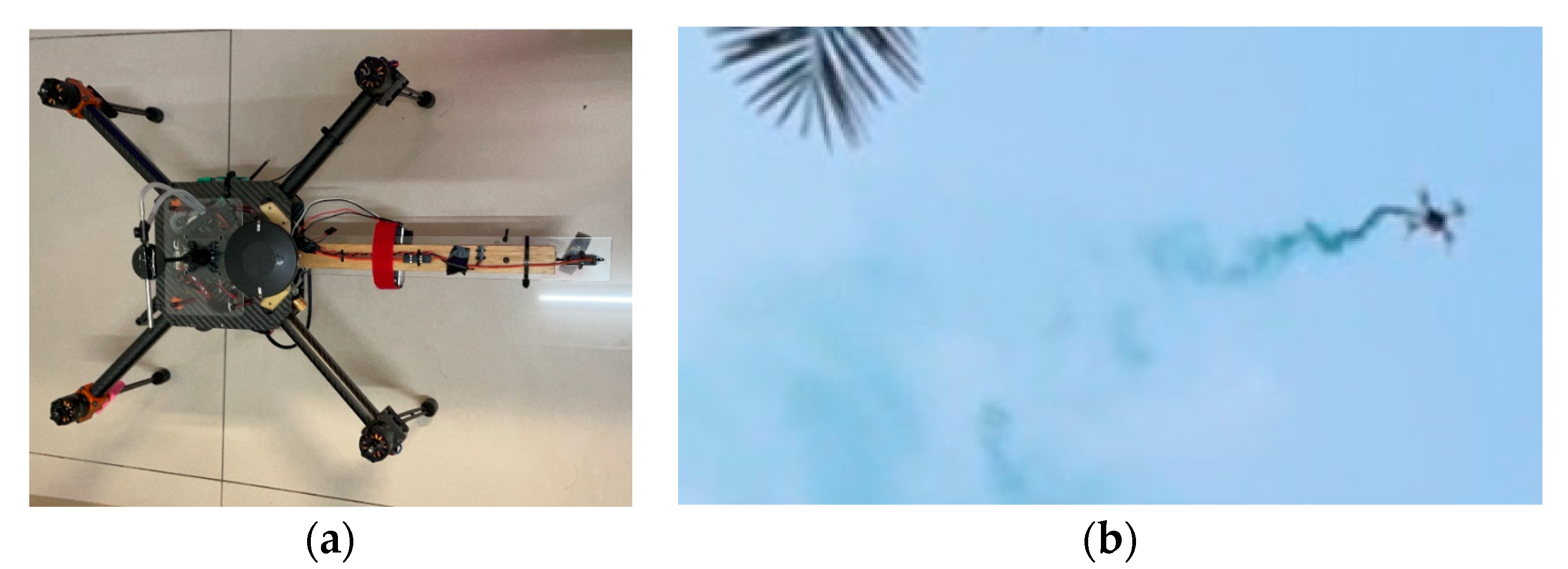
2.1. Unmanned Aerial Vehicle
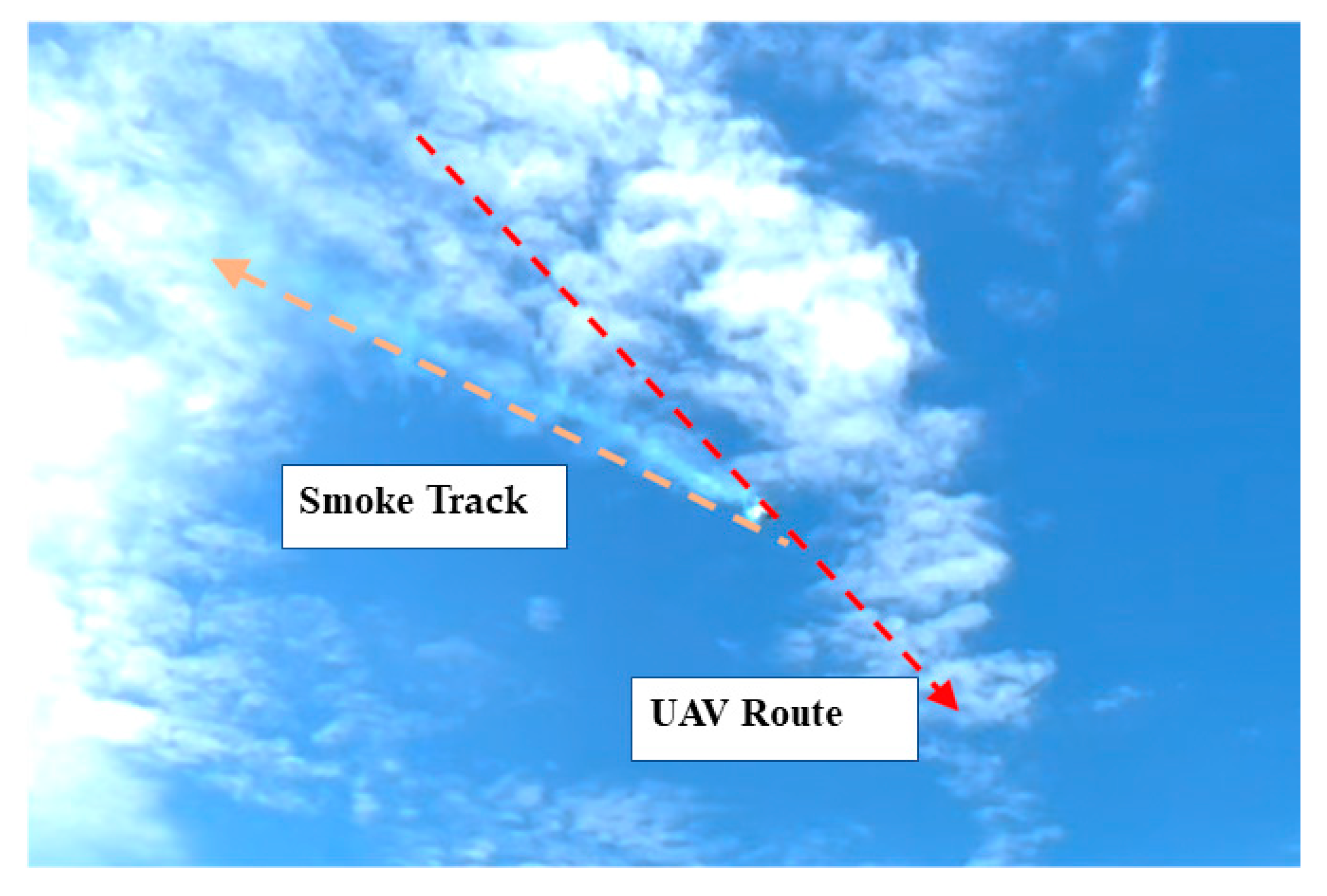
2.2. Smoke Tube Position
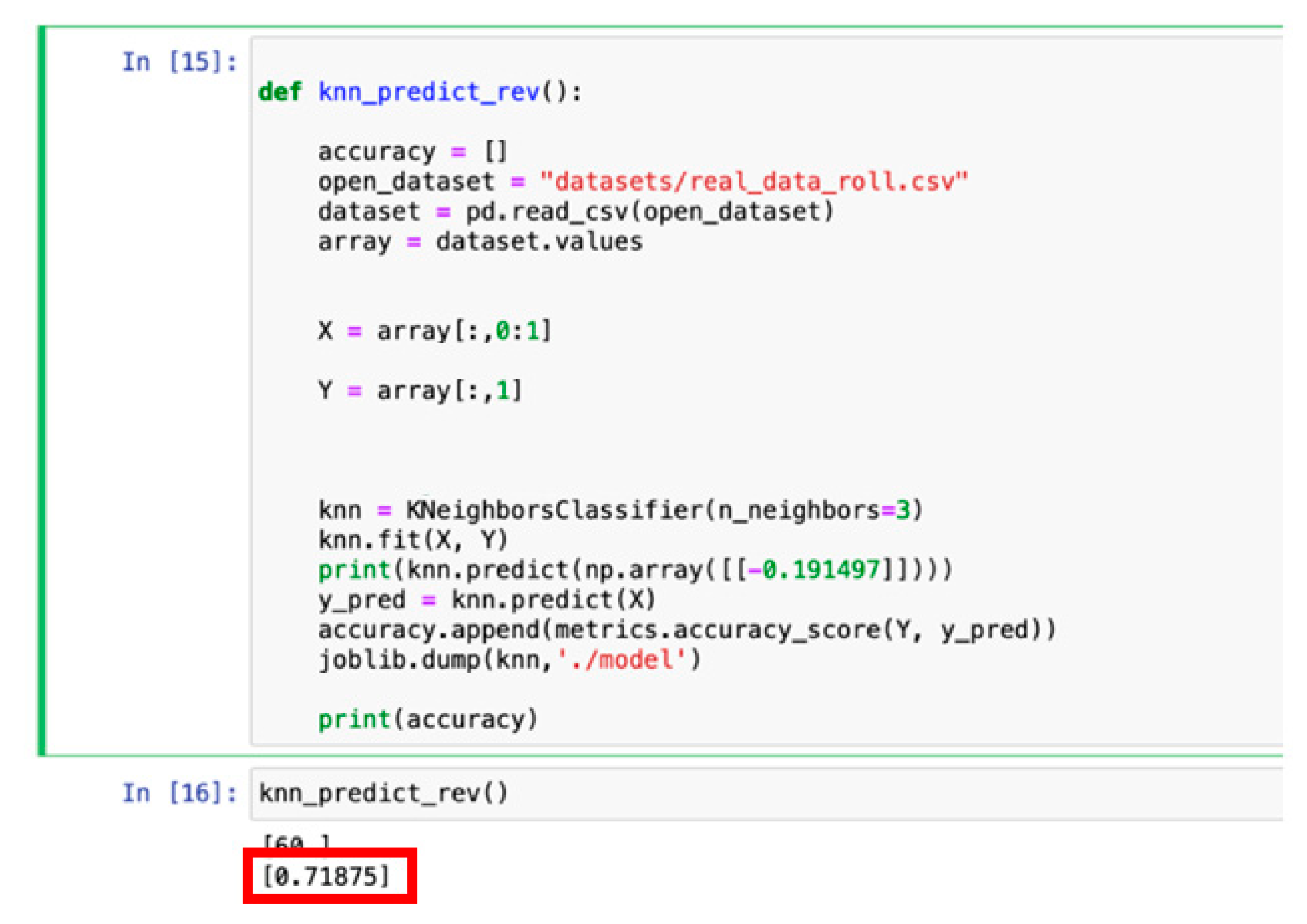
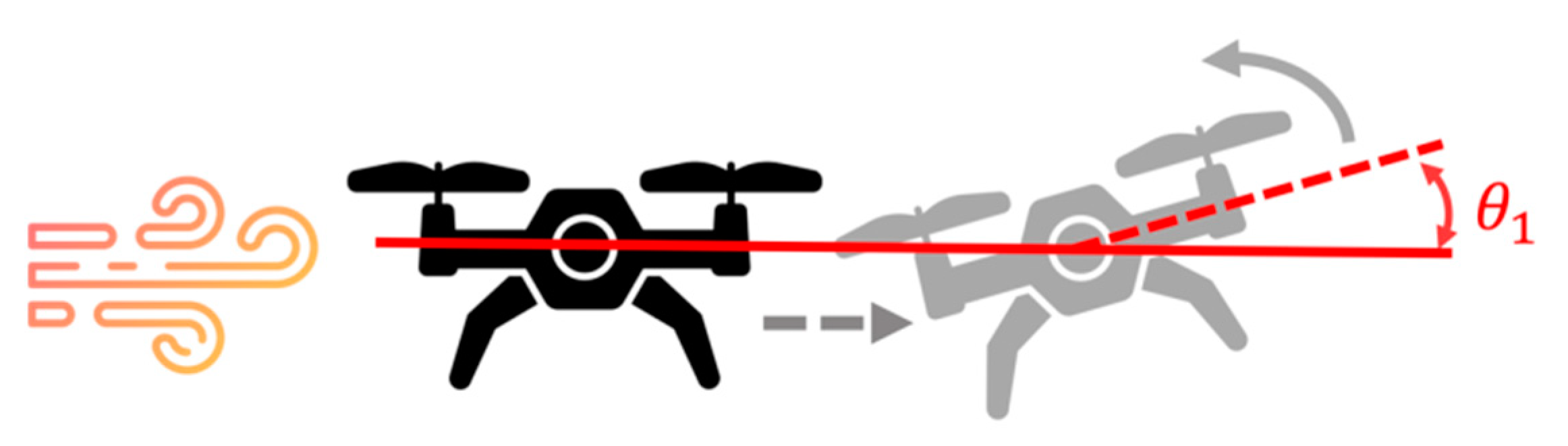
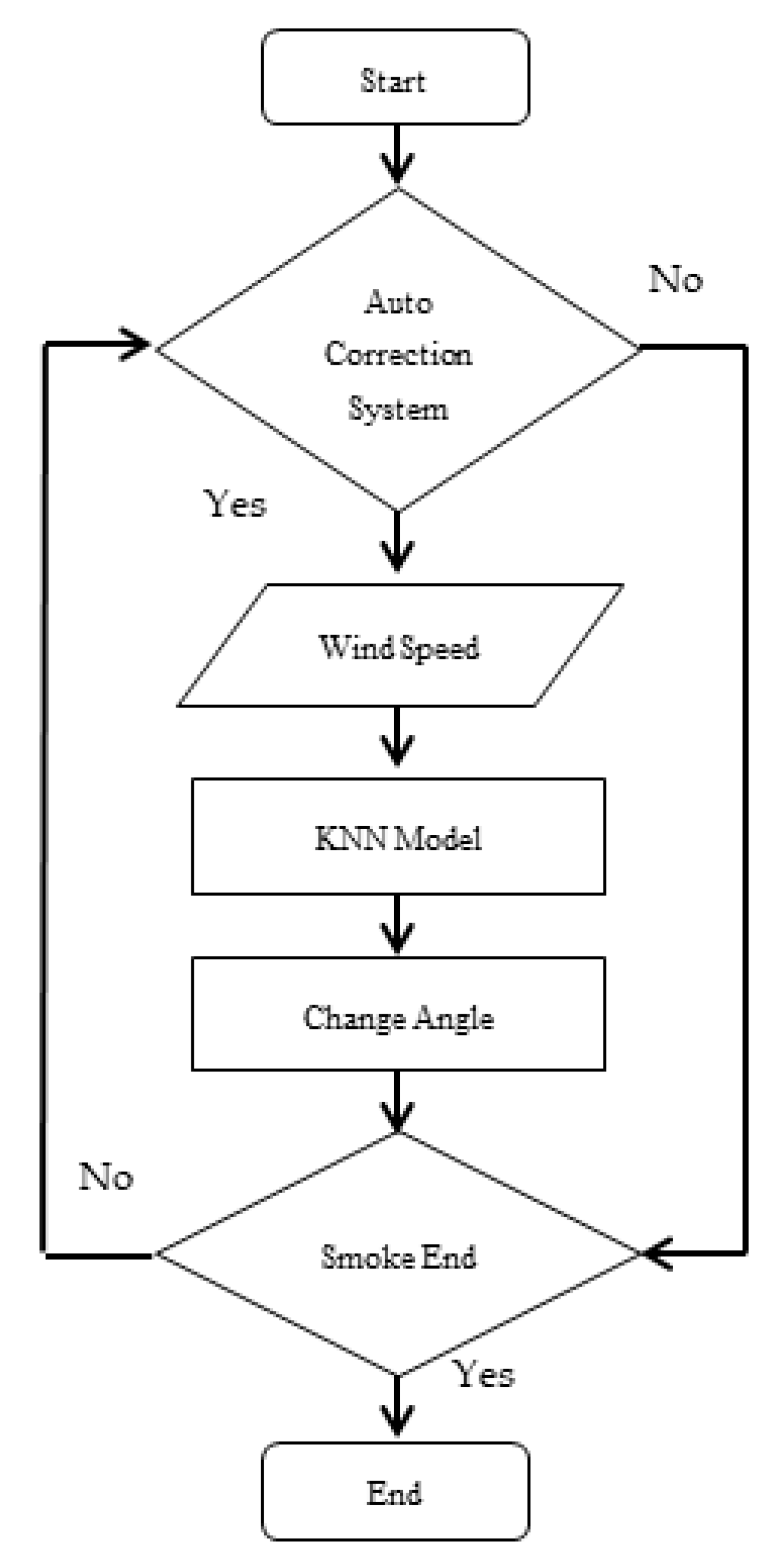
2.3. AI Model Selection and Design
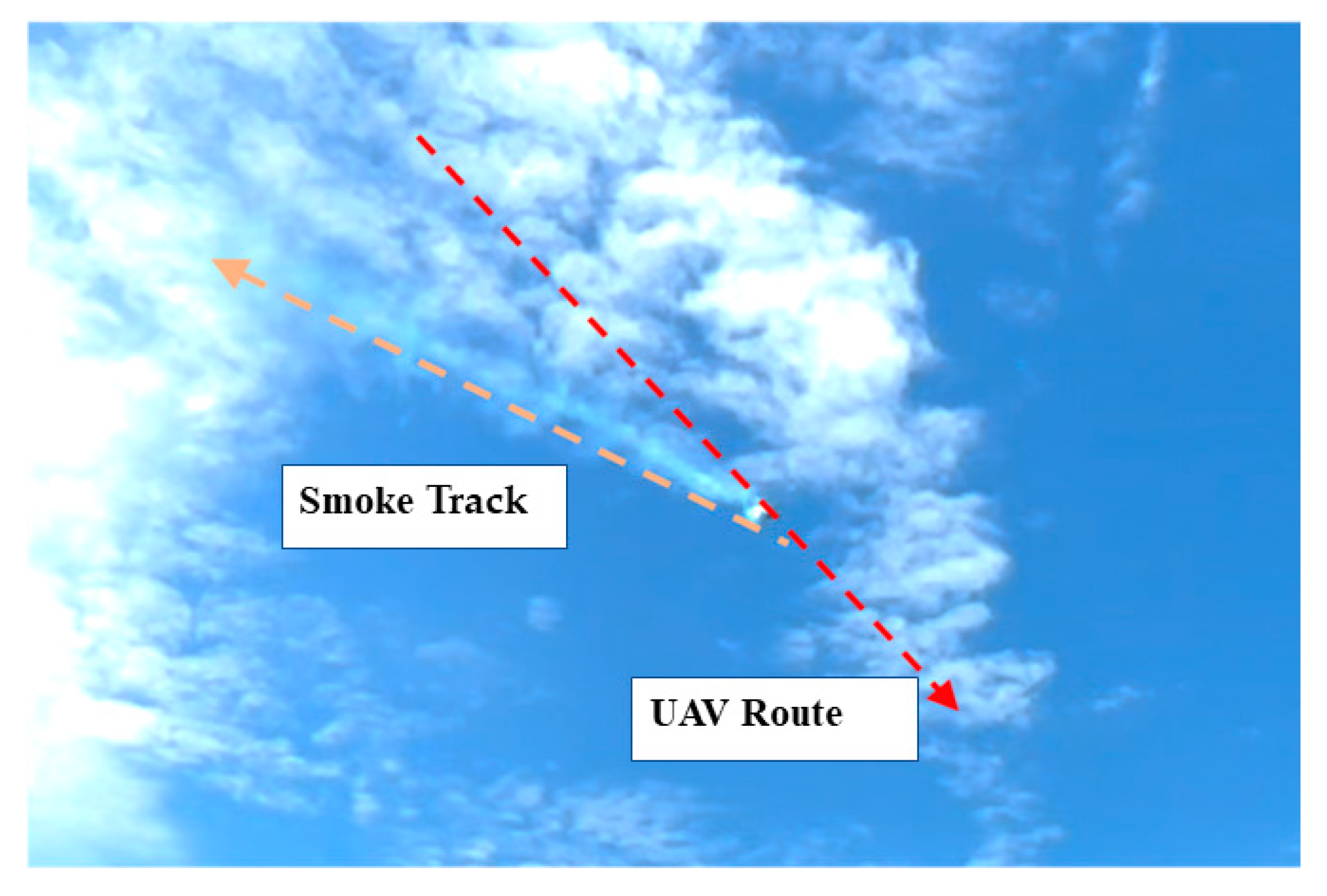
3. Experimental Results and System Validation
4. Conclusions and Future Work
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Valavanis, K.V. Advances in Unmanned Aerial Vehicles—State of Art and the Road to Autonomy; Springer: Berlin/Heidelberg, Germany, 2007. [Google Scholar]
- Papa, U. Embedded Platforms for UAS Landing Path and Obstacle Detection: Integration and Development of Unmanned Aircraft Systems; Springer: Berlin/Heidelberg, Germany, 2018; Volume 136. [Google Scholar]
- Lillian, B. FAA Predicts Future UAS Growth. 2019. Available online: https://unmanned-aerial.com/faa-predicts-future-uas-growth (accessed on 15 May 2020).
- González-Jorge, H.; Martínez-Sánchez, J.; Bueno, M.; Arias, P. Unmanned Aerial Systems for Civil Applications: A Review. Drones 2017, 1, 2. [Google Scholar] [CrossRef] [Green Version]
- Sigala, A.; Langhals, B. Applications of Unmanned Aerial Systems (UAS): A Delphi Study Projecting Future UAS Missions and Relevant Challenges. Drones 2020, 4, 8. [Google Scholar] [CrossRef] [Green Version]
- Department of Transportation. Unmanned Aircraft Systems (UAS) Service Demand 2015–2035: Literature Review & Projections of Future Usage; Technical Report, Version 0.1; UASF Aerospace Management Systems Division, Air Traffic Systems Branch (AFLCMC/HBAG): Bedford, MA, USA, 2013; 151p. [Google Scholar]
- Ollero, A. UAV Applications. In Handbook of Unmanned Aerial Vehicles; Valavanis, K.P., Vachtsevanos, G.J., Eds.; Springer: Berlin/Heidelberg, Germany, 2015; pp. 2638–2860. [Google Scholar]
- Mahmoud Zadeh, S.; Powers, D.M.W.; Zadeh, R.B. Autonomy and Unmanned Vehicles—Augmented Reactive Mission and Motion Planning Architecture; 66C-PRT; Springer Nature Singapore Pte Ltd.: Singapore, 2019; Volume I, pp. 562–566. [Google Scholar]
- Mustapha, B.; Zayegh, A.; Begg, R.K. Multiple sensors based obstacle detection system. In Proceedings of the 4th International Conference on Intelligent and Advanced Systems (ICIAS2012), Kuala Lumpur, Malaysia, 12–14 June 2012. [Google Scholar]
- Gageik, N.; Benz, P.; Montenegro, S. Obstacle Detection and Collision Avoidance for a UAV with Complementary Low-Cost Sensors. IEEE Access 2015, 3, 599–609. [Google Scholar] [CrossRef]
- Engel, J.; Sturm, J.; Cremers, D. Camera-based navigation of a low-cost quadrocopter. In Proceedings of the 2012 IEEE/RSJ International Conference on Intelligent Robots and Systems, Vilamoura, Portugal, 7–12 October 2012; pp. 2815–2821. [Google Scholar]
- Shen, H.; Jiang, Y.; Deng, F.; Shan, Y. Task Unloading Strategy of Multi UAV for Transmission Line Inspection Based on Deep Reinforcement Learning. Electronics 2022, 11, 2188. [Google Scholar] [CrossRef]
- Aswini, N.; Uma, S.V. Obstacle Detection in Drones Using Computer Vision Algorithm. In Advances in Signal Processing and Intelligent Recognition Systems, SIRS 2018; Communications in Computer and Information, Science; Thampi, S., Marques, O., Krishnan, S., Li, K.C., Ciuonzo, D., Kolekar, M., Eds.; Springer: Singapore, 2019; Volume 968. [Google Scholar]
- Zipline. Zipline Delivers 1 Million COVID-19 Vaccines in Ghana. Available online: https://flyzipline.com/press/zipline-delivers-1-million-covid-19-vaccines-in-ghana (accessed on 4 July 2022).
- Hellaoui, H.; Bekkouche, O.; Bagaa, M.; Taleb, T. Aerial control system for spectrum efficiency in UAV-to-cellular communications. IEEE Commun. Mag. 2018, 56, 108–113. [Google Scholar] [CrossRef] [Green Version]
- Hexsoon EDU450—Description and Technical Data. 2019. Available online: https://ardupilot.org/copter/docs/reference-frames-hexsoon-edu450.html (accessed on 12 August 2021).
- Motlagh, N.H.; Bagaa, M.; Taleb, T. UAV-based IoT platform: A crowd surveillance use case. IEEE Commun. Mag. 2017, 55, 128–134. [Google Scholar] [CrossRef] [Green Version]
- Feng, H.; Eyers, D.; Mills, S.; Wu, Y.; Huang, Z. Principal component analysis based filtering for scalable high precision k-nn search. IEEE Trans. Comput. 2018, 67, 252–267. [Google Scholar] [CrossRef]
- Wu, Z.; Ke, Q.; Isard, M.; Sun, J. Bundling features for large scale partial-duplicate web image search. In Proceedings of the 2009 IEEE Conference on Computer Vision and Pattern Recognition, Miami, FL, USA, 20–25 June 2009; pp. 25–32. [Google Scholar]
- Altman, N.S. An Introduction to Kernel and Nearest-Neighbor Nonparametric Regression. Am. Stat. 1992, 46, 175–185. [Google Scholar] [CrossRef] [Green Version]
- Stone, C.J. Consistent Nonparametric Regression. Ann. Stat. 1977, 5, 595–620. Available online: https://www.jstor.org/stable/2958783 (accessed on 21 July 2022). [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Roll Input | Predicted Angle |
|---|---|
| 0.00364547478966 | 0° (Middle) |
| 0.00348061858676 | 0° (Middle) |
| 0.00342658907175 | 0° (Middle) |
| 0.00615163240582 | 0° (Middle) |
| 0.0677677094936 | −60° (Right) |
| 0.0777317807078 | −60° (Right) |
| 0.08781837672 | −30° (Right) |
| 0.0836124494672 | −30° (Right) |
| −0.0313124507666 | 30° (Left) |
| −0.157921299338 | 60° (Left) |
| −0.180348366499 | 60° (Left) |
| −0.105139121413 | 30° (Left) |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chao, P.-Y.; Hsu, W.-C.; Chen, W.-Y. Design of Automatic Correction System for UAV’s Smoke Trajectory Angle Based on KNN Algorithm. Electronics 2022, 11, 3587. https://doi.org/10.3390/electronics11213587
Chao P-Y, Hsu W-C, Chen W-Y. Design of Automatic Correction System for UAV’s Smoke Trajectory Angle Based on KNN Algorithm. Electronics. 2022; 11(21):3587. https://doi.org/10.3390/electronics11213587
Chicago/Turabian StyleChao, Pao-Yuan, Wei-Chih Hsu, and Wei-You Chen. 2022. "Design of Automatic Correction System for UAV’s Smoke Trajectory Angle Based on KNN Algorithm" Electronics 11, no. 21: 3587. https://doi.org/10.3390/electronics11213587
APA StyleChao, P.-Y., Hsu, W.-C., & Chen, W.-Y. (2022). Design of Automatic Correction System for UAV’s Smoke Trajectory Angle Based on KNN Algorithm. Electronics, 11(21), 3587. https://doi.org/10.3390/electronics11213587