1. Introduction
Vehicle-to-everything (V2X) communication plays an important role in connected vehicles and cooperative automated driving to improve safety, traffic efficiency, and driving experience. It will be committed to resolving communication issues between people and things as well as satisfying the demands of burgeoning application sectors, such as intelligent transportation systems, mobile medical care, and smart homes, all while increasing human-to-human communication [
1]. The continuous updating of communication technologies [
2] and device materials [
3,
4,
5] is supporting the development of intelligent transportation systems. Autonomous driving is transforming the way people move as a crucial component of intelligent transportation systems. To accomplish autonomous driving, intelligent cars with sensors and networked data must be integrated with artificial intelligence technology. To obtain better decision results, intelligent vehicles need to communicate with surrounding vehicles or roadside units (RSUs) to obtain real-time exchange data [
6]. V2X communication is seen to be a suitable approach for improving traffic management and increasing the safety of autonomous driving [
7,
8].
V2X communication technologies also introduce new problems, such as various use cases and a high volume of data transmission [
9,
10]. V2X standards with frequencies of less than 6 GHz are incapable of meeting the data throughput and transmission speeds necessary for advanced use cases [
11,
12]. Millimeter-wave communication technology employs an underused and ultra-wide frequency band (30 to 300 GHz) and offers data transfer speeds in the Gbps range, sufficient to fulfill the data needs of advanced use cases [
13,
14,
15]. Furthermore, millimeter-wave communication offers benefits, such as excellent transmission quality and strong detection capabilities, which are advantageous in dealing with the present condition of continual upgrading and growth of wireless technologies. However, since millimeter-wave signals have high frequencies and short wavelengths and are easily obstructed by barriers [
16], directional antennas are required for beam direction alignment to assure acceptable communication quality. To mitigate the effects of route loss, massive MIMO approaches may employ beamforming to generate high-gain directed beams [
17,
18]. As a result, the combination of millimeter-wave and massive MIMO methods will be extremely promising for providing high system capacity and data rates for V2X communication, while also ensuring system connection dependability [
19].
To adapt the communication system to the current channel state and ensure that the transmitted signal is correctly received by the receiver, the whole channel state information (CSI) that defines the propagation characteristics of the wireless communication link must be known. Optimal beamforming is required, particularly for millimeter-wave massive MIMO communication systems, and so channel estimation is required. Many common techniques, such as sparse recovery [
20], linear minimal mean square error [
21], compressive sensing [
22,
23], deep learning (DL) [
24], and other methods, are superior for channel estimation research and have been extensively explored. However, the majority of the related research is for quasi-static communication systems. As the application area of channel estimation expands [
25,
26,
27], methods for fast time-varying channels have begun to develop in great numbers. The authors presented a new transmission frame structure in [
28] that breaks the channel estimation process into two stages, allowing for the efficient estimation of time-varying channels with fewer leads. The authors of [
29] completely analyzed the sparsity and time dependency of the channel and treated it as a simultaneous sparse signal model. To avoid adding too much system complexity to CSI estimation, the authors offered an AMA-IMOT channel estimation approach for STBC MIMO-OFDM systems and included two estimate schemes in the literature [
30]. The authors of [
31] used superposition training for time-varying channels in multiple-input multiple-output/orthogonal frequency division multiplexing linear systems and estimated the time-varying channels in two steps.
The high-speed movement of vehicles in V2X communication system situations results in fast time-varying channels, posing a significant challenge to channel estimation. There is a substantial body of work that describes how DL approaches were utilized to solve the channel estimation problem in V2X communication system scenarios. The authors of [
32] proposed a DL-based MIMO radar-assisted channel estimation method that divides channel estimation into two parts—angle of arrival (AOA) or angle of departure (AOD) estimation, and a gain estimation phase—and achieves efficient channel estimation performance with less training overhead. The authors of [
33] developed a DL-based low-rank channel estimation approach that does not require knowledge of the vehicle’s location information and achieved a rather good mean square error performance. The authors of [
34] presented a DL-based judgment-oriented channel estimation method that requires only a priori knowledge of the Doppler rate without the exact Doppler rate calculation and outperforms previous judgment-oriented channel estimation algorithms that need Doppler rate estimation. Although these DL-based channel estimation approaches produce good results, they can only be used in application scenarios with limited data, and the training process necessitates a large dataset. There is also a substantial corpus of literature on sparse Bayesian learning (SBL) approaches. In the literature [
35], it is proposed to leverage information from dynamic sparse channels as hyperparameters in the next time-multitask SBL process, which can update the subcarrier parameter information. Reference [
36] incorporates the estimation problem of time-varying channels into the SBL framework and addresses the challenge of estimating the channel in MIMO systems based on the pilot frequency. These SBL-based approaches ignore the received signal’s low-rank features, while accounting for the sparse characteristics of the time-varying channel.
A tensor is a mathematical tool that, as a generalization of vectors and matrices, allows data representation to be independent of the coordinate system used, which has significant advantages when working with high-dimensional data. Relevant research has been carried out to establish the viability of tensor applications in channel estimation. The authors of [
37] used tensors to estimate channels in huge MIMO-OFDM systems and produced a tensor-based channel model. In [
38], tensor decomposition and the direction-of-arrival (DOA)-based channel estimation method are proposed to acquire CSI in massive MIMO communication, and a hybrid tensor model of the channel matrix and symbol matrix is constructed to achieve a joint estimate of blind 2D DOA and symbols. Because massive MIMO systems have multipath components, the authors of [
39] used an R-D channel model based on higher-order singular value decomposition with R-dimensional parameters for multipath component parameter estimation, implemented tensor decomposition and recovery using an incomplete higher-order orthogonal iterative algorithm, and used a subspace approach to estimate the parameters of interest. Given the low-rank properties of millimeter-wave signals, reference [
40] proposed a channel parameter estimation approach based on the structured CP decomposition (SCPD) form tensor, which permits channel parameter estimation from the factor matrix. Although the preceding approaches perform well, the majority of them are only suited for estimating quasi-static wireless channels and are not ideal for the fast time-varying instances of channels in V2X communication scenarios.
The estimation of signal DOA is a prominent topic in the world of array signal processing, where the main goal is to estimate the incoming wave direction of a signal in space to determine the spatial position distribution of the signal source [
41,
42]. Methods for estimating array signal DOA, such as covariance matrix-based [
43], subspace-based [
44], and parametric minimum criterion-based [
45], have yielded promising results. In [
46], the authors explained how the number of antennas limits the precision when estimating the DOA of a target using MIMO radar and offered a new way of virtually extending the number of effective receiving antennas without increasing the real number of antennas. Considering the low signal-to-noise ratio and masking effects of the echo signal, in [
47], the authors proposed a process of target echo signal enhancement and attenuation of the interference before performing estimation, followed by DOA estimation using methods, such as conventional multi-signal classification. A DOA estimation method using subbands with a good trade-off between broadband and narrowband methods is presented in [
48] and can be applied to automatic orientation tracking systems. However, the majority of these solutions are designed for static sources, and method improvements are still required for DOA tracking difficulties with dynamic sources.
In this paper, an ultrasonic-aided tensor channel estimation algorithm for V2X millimeter-wave massive MIMO systems is proposed with the following contributions:
(1) The high-dimensional complex received signal is represented by a tensor, and the proposed subspace dimensionality reduction tensor decomposition model is used to decompose the tensor of the received signal, which is faster than the conventional tensor decomposition methods. The proposed fast hierarchical alternating iterative tensor algorithm is used for the decomposed tensor to perform channel estimation by joint iterations and converges faster because the algorithm considers the cost function with global characteristics.
(2) An ultrasonic-aided DOA tracking method based on quantization grid and dictionary matrix adaptive iterative update is proposed for beam angle update after a vehicle position change. The method is based on a set of ultra-high resolution quantization grids and transforms DOA tracking into a sparse recovery problem by exploiting the sparse scattering property of ultrasonic waves. The dictionary matrix can be iteratively updated adaptively to reduce the impact of quantization errors. The continuously updated beam emission direction will be obtained by transforming the DOA tracking results. Using the cost function with global characteristics and ultrasonic-aided DOA tracking, the fast layered alternating iterative tensor algorithm is proposed for joint iterative channel estimation.
The remainder of this paper is structured as follows.
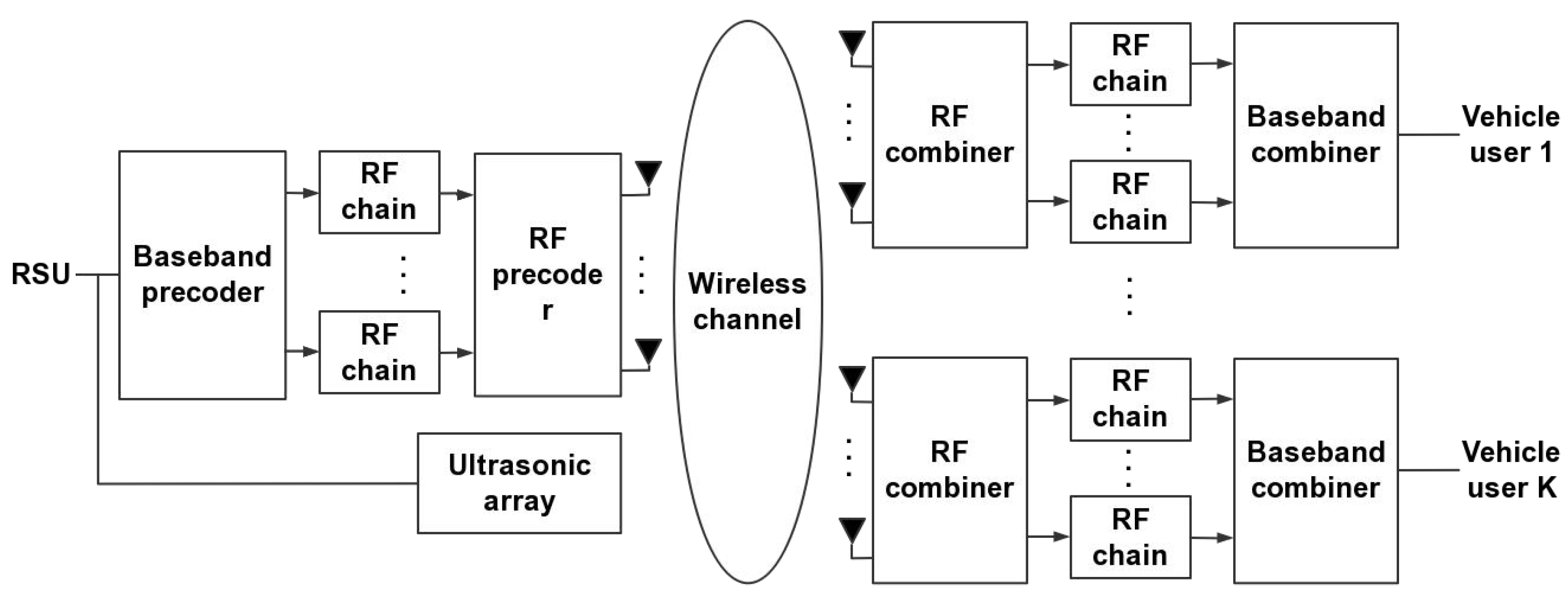
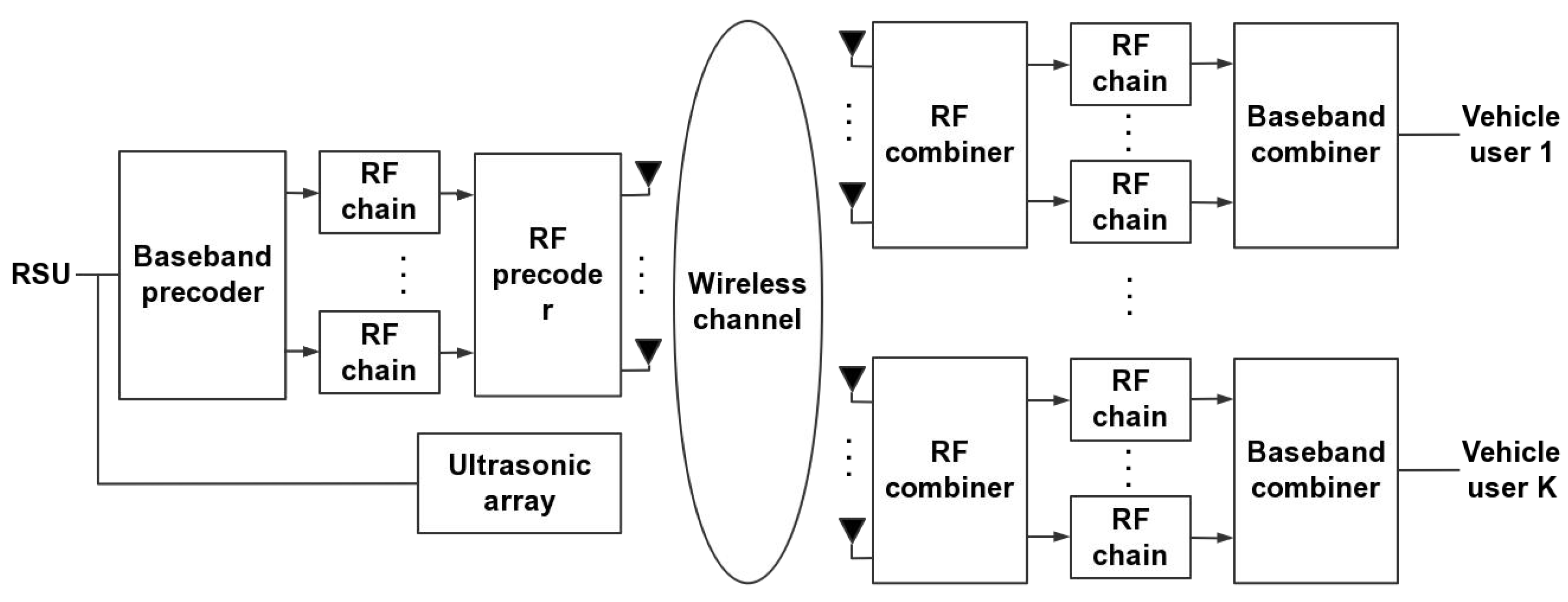
Section 2 analyzes the V2X communication system model and channel model for millimeter-wave massive MIMO systems. The proposed channel estimation algorithm is presented in
Section 3. The proposed DOA tracking algorithm based on ultrasonic-assist is presented in
Section 4.
Section 5 shows the simulation results and related analysis. Finally, the conclusions of this paper are drawn in
Section 6.
Notation: We use fine lowercase letters () and uppercase letters () for scalars, bold lowercase letters () for column vectors, bold uppercase letters () for matrices, and uppercase calligraphic letters ( ) for tensors. , , , , and denote the conjugate, transpose, conjugate transpose, inverse, and pseudo-inverse of the given matrix , respectively. denotes the inner product of and . , , and denote the 0-norm, the first-order norm and the Frobenius norm, respectively. represents the zero-mean complex Gaussian distribution with zero-mean and the variance . The symbols ⊗, ⊙, and ∘ denote the Kronecker product, Khatri–Rao product, and the outer product, respectively.
4. Ultrasonic-Aided DOA Tracking
Since the high-speed movement of a vehicle causes dynamic changes in vehicle position, it is necessary to track the angular changes of the communication beam in order to obtain better channel estimation quality. DOAs reflect the AOA information of the signal, and this section proposes an ultrasonic-aided DOA tracking algorithm, specifically, by performing high-resolution quantization of the angular region and using an adaptive iterative update of the dictionary matrix to estimate the ultrasonic echo AOAs of the signal, and the AODs of the communication beam will be obtained from these AOAs transformations.
In the V2X scenario, there are other scatterers besides the vehicle and the RSU, and the height of the scatterers is higher than or approximately equal to the vehicle, so the ultrasonic signal transmitted by the RSU may reach the RSU from any direction after being reflected from the vehicle and the scatterers. Usually, the RSU is deployed above the scatterer to ensure that the received signal from the RSU is confined to a suitable angular range. In this paper, we define the AOA/AOD ranges of the effective signals as
and
, respectively, and grid the AOA and AOD ranges into two sets
and
. The sets
and
are defined as follows:
where
and
denote the quantization grid points of AOA and AOD, respectively. In order to reduce the quantization error, the angular grids of the receive and transmit here are set to have the form of ultra-high resolution, i.e.,
and
. Thus, the redundant dictionary matrix formed by the transmit–receive array streamline matrix can be expressed as
We can rewrite Equation (
10) as
where
denotes the vector of coefficients under the redundant dictionary matrix representation. If all real AOAs/ AODs are located on the grid represented by the redundancy dictionary matrix, the number of nonzero elements of
is
, and the angular information can be determined by the positions of the nonzero elements in the vector. However, due to the presence of power leakage, the actual number of nonzero elements will be larger than
, so it is assumed that there are
nonzero elements in
, i.e.,
can be viewed as a
-sparse vector. At this point, the problem of estimating the AOAs/AODs becomes the sparse recovery problem of
:
To improve the accuracy of the angle estimation while matching with the channel estimation process, we consider
time slots of the transmission frame. Then, at most,
non-zero elements need to be recovered in the sparse recovery process. The sparse matrix model of the obtained signal is as follows:
where
is the known observation matrix consisting of signals from
consecutive time slots,
can be called the measurement matrix,
is the unknown sparse coefficient matrix, and
is the received noise matrix. Since the AOAs/AODs remain constant during a frame, the sparsity is invariant, and the aggregation vector
is jointly sparse. Therefore, Equation (
39) can be expressed as the following joint sparse recovery problem:
where
denotes the row sparsity of matrix
, defined as
Next, we introduce an adaptive iterative update of the AOAs/AODs region by updating the measurement matrix with the estimated AOAs/AODs from the previous iteration. In this way, the impact of large estimation errors due to the limited resolution of the dictionary matrix can be reduced. Algorithm 2 describes the dictionary matrix adaptive update process.
In the algorithm, the
ith iteration of the outer loop is used to estimate the AOA/AOD of the
ith array element. In each inner loop, according to the best index,
such that
is most relevant to the residual matrix
. Then, we can calculate
and
. The region of AOAs/AODs of the
ith array element is updated as follows:
where
g is the step size.
| Algorithm 2: The proposed dictionary matrix adaptive iterative update algorithm. |
Input: dictionary matrix , observation matrix , desired error , maximum iteration , number of cycles J. - 1:
Initialization: , , , , . - 2:
When and , steps 3 to 9 are performed; - 3:
; - 4:
When , steps 5 to 7 are performed; - 5:
, , ; - 6:
, ; - 7:
, ; - 8:
Update the AOAs/AODs region according to Equations (42)–(46) and redesign the measurement matrix C according to Equations (34)–(36); - 9:
.
Output:, and . |
The AOAs /AODs update algorithm proposed has the following advantages: (1) Due to the adaptive update of the AOAs/AODs region, the measurement matrix is redesigned and the resolution is increased. (2) The selected generation can reduce the power leakage problem caused by the quantized grid, and the accuracy of the AOAs/AODs update is improved. (3) The positions of non-zero elements are independent of the Doppler shift, so the angular update is robust to the Doppler shift caused by the high-speed movement of the vehicle.
Due to the difference in the location of the ultrasonic array and the millimeter-wave antenna array, next, we need to obtain the AODs of the millimeter-wave signals based on the estimated AOAs of the ultrasonic signals. Consider a spatial three-dimensional coordinate system; for simplicity, the millimeter-wave antenna array and the ultrasonic array set up in this paper are in the same plane. For a certain ultrasonic receiving array point
p in the plane, let the starting point of its received echo signal be
v, and the millimeter-wave antenna transmitting array point at the corresponding position that needs to update the AOD be
, as shown in
Figure 3.
where
is the AOA of point
p, which has been derived by estimation.
is the AOD of the antenna to be updated. The mode length
of the vector
is obtained from the calculation of the transmission delay and speed of the ultrasonic signal. The mode length
of vector
is determined by the array setup. According to the geometric relationship, the transformation process is as follows:
The required AODs update information
in Equation (
1) can be obtained by the above transformation. This can be used to update the emission direction of the millimeter wave to ensure V2X communication quality and to obtain an accurate CSI.
5. Simulation Results and Analysis
In this section, we simulate and discuss the proposed scheme’s performance. We consider the urban road scenario of the 5G-V2I communication system, and set the simulation parameters as follows.
We set up a millimeter-wave massive MIMO communication system operating in the 73 GHz band with a bandwidth of 20 MHz. The number of FFT points is 64, the symbol period is µs, and the number of subcarriers is 64. A downlink transmission frame structure is used at , and . Other parameters include the expected error , the angular range of AOAs and AODs is , the number of paths is , and the maximum Doppler shift is .
We consider the performance of the vehicle at two speeds, 90 km/h and 150 km/h. Compare the proposed channel estimation algorithm with the least square (LS), orthogonal matching pursuit (OMP), SBL, and SCPD algorithms. Compare the DOA tracking algorithm with the projection approximation subspace tracking (PAST), projection approximation and subspace tracking of deflation (PASTD), particle filtering (PF), and PF-MUSIC algorithms. We use normalized mean square error (NMSE) to evaluate the estimation accuracy of the channel estimation algorithm and root mean square error (RMSE) to evaluate the tracking accuracy of the DOA tracking algorithm. The expressions for both are as follows:
where
denotes the estimated value of the channel,
H denotes the actual value of the channel,
denotes the estimated value of the DOA trace in the
nth time slot, and
denotes the actual value of the DOA.
Figure 4 show the RMSE performance of DOA tracking versus the signal-to-noise ratio (SNR) for vehicle speeds of 90 km/h and 150 km/h. It can be seen that the PAST and PASTD algorithms have larger errors at some estimation points, which is due to the fact that these types of algorithms are based on subspace updates, and it is more difficult to guarantee the orthogonality of the signal and noise subspaces during the update process. The effect of PF class algorithms is better than PAST and PASTD algorithms because the DOA estimates will be closer to the true values due to the multiple iterations of the weights in PF class algorithms. However, the PF algorithm is susceptible to environmental noise. The performance of the PF-MUSIC algorithm is close to that of our proposed algorithm, but the PF-MUSIC algorithm requires a large number of eigenvalue decompositions, which has the problem of high complexity and high computing power. With the increase in vehicle speed, the RMSE performance of various algorithms decreases, i.e., the DOA tracking accuracy decreases, but our algorithm still maintains good RMSE performance. We also compare the DOA single tracking time of different algorithms when the number of array elements is 16, as shown in
Table 1. It can be seen that the PF-MUSIC algorithm has a long single tracking time because it takes computational time on the eigenvalue decomposition. The single tracking time of the PF algorithm is slightly shorter than that of the PF-MUSIC algorithm, but it still has a long single tracking time. The single tracking time of the PAST algorithm is close to our proposed algorithm and is faster than that of the PASTD algorithm, which is due to the slower convergence of the PASTD algorithm. Combining the above, the DOA tracking algorithm proposed in this paper has better results than the comparison algorithms.
Figure 5 show the NMSE performance of the channel estimation versus SNR for vehicle speeds at 90 km/h and 150 km/h. It can be seen that the LS algorithm performs poorly in all SNR ranges, especially in the low SNR case, because it does not take into account the noise factor in the channel. It is susceptible to noise. The OMP algorithm performs poorly because it mainly considers quasi-static channels with relatively stable channel conditions and is not applicable to the time-varying channel conditions of V2X. The performance of SBL is also worse but slightly better than that of OMP because SBL considers the sparse characteristics of the channel but not the low-rank characteristics. The SCPD algorithm utilizes the CP tensor decomposition method but does not take into account the effect of the low-rank characteristic. The better NMSE performance of the proposed channel estimation algorithm compared to the comparison algorithm is probably due to the fact that the proposed algorithm combines the DOA tracking algorithm, which accurately updates the beam ground angle information to make the channel conditions more stable, and takes advantage of the low-rank property.
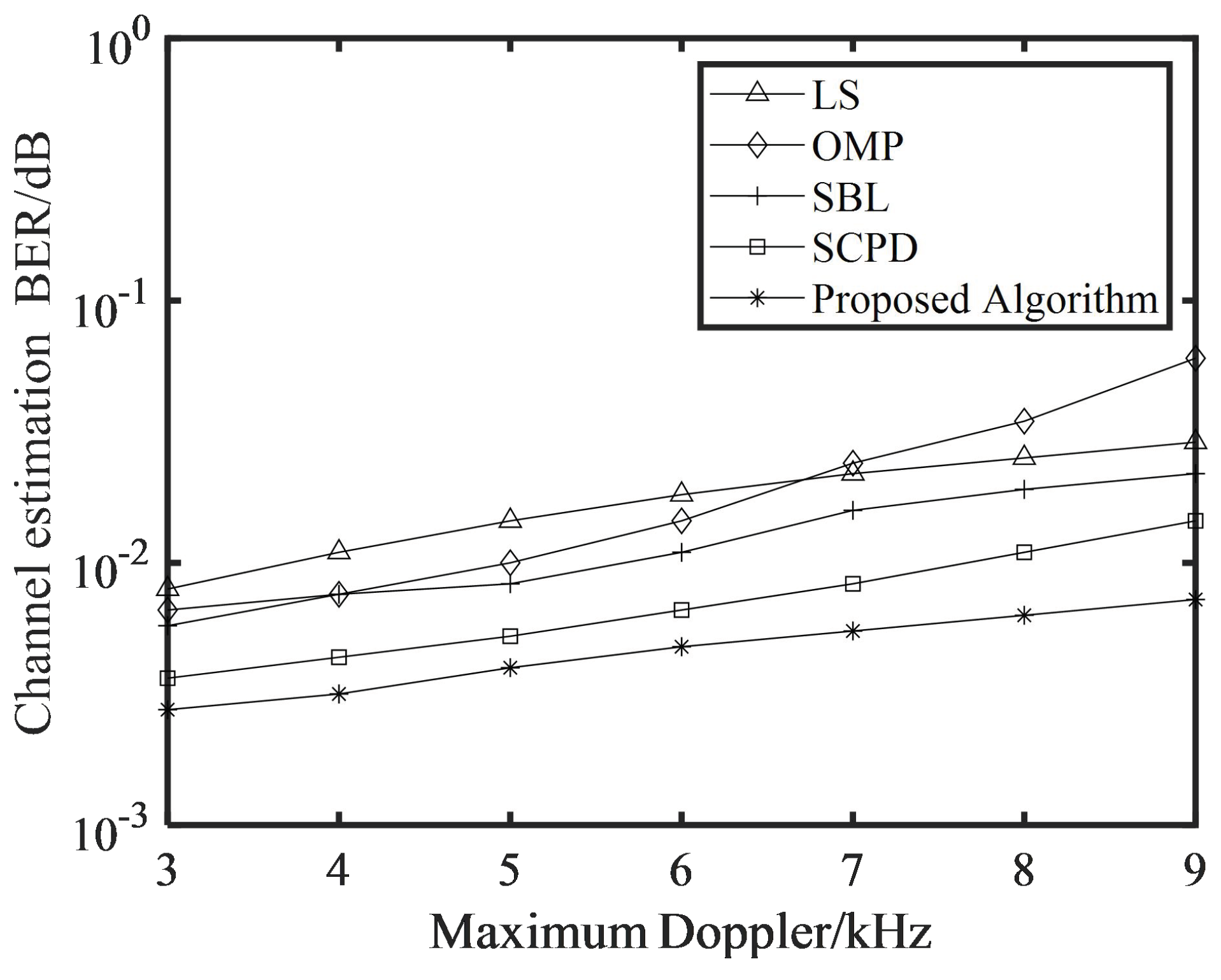
Figure 6 show the bit error rate (BER) versus SNR for channel estimation at vehicle speeds of 90 km/h and 150 km/h. We can see that the BERs of the proposed channel estimation algorithm and the SCPD algorithm are generally lower and better than those of the other compared algorithms, and the BER performance of the proposed channel estimation algorithm is better at higher SNR. The LS algorithm is greatly affected by noise and has a high BER at low SNR. The BER performance of the OMP algorithm is also poorer because we consider the time-varying channel case where the Doppler shift exists and also the speed is higher. The BER performance of the SBL algorithm is slightly better than the OMP, but it does not fully consider the low-rank characteristics and still has some gaps with the proposed channel estimation algorithm.
Figure 7 and
Figure 8 show the NMSE and BER versus the maximum Doppler shift
due to the change in vehicle speed, ranging from 3 kHz to 9 kHz. It can be seen that the NMSE and BER performance is related to
and gradually deteriorates with increasing Doppler shift, which is due to the large Doppler shift when the vehicle speed is high, i.e., corresponding to the channel time-variability enhancement, the channel estimation parameters are not well adapted. However, our proposed scheme still maintains good stability and robustness because it performs DOA tracking and beam angle update compared to the comparison algorithm, and thus is able to sense the channel changes in a more timely manner.












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}