This section presents application examples of the AAO-based DSS proposed in this paper for ATM/UTM systems. The examples present realistic scenarios from different airspace situations.
5.1. Airspace Situation 1: Distributed Sensing of Weather Condition
Scenario 1 considers Flight BA249, flying at cruise altitude (40,000 feet) while approaching the northeast coast of Brazil (
Figure 8). The airplane took off from London Heathrow Airport (LHR) and is scheduled to land at Rio de Janeiro Airport (GIG) by evening, local time. Weather conditions are assumed to have remarkably deteriorated in Sector 3 of the Recife Flight Information Region (SBRE FIR, Brazilian northeast coast). However, the weather condition is good for landing at GIG.
Information regarding the above weather condition can be obtained from three different sources: Airborne Weather Radar systems (AWRSs), Satellite Weather Radar Systems (SWRSs), and Land Weather Radar Systems (LWRSs). AWRSs are located in the aircraft nose and allow for detection of the intensity of convective weather conditions such as massive hails, powerful lightning, and excessive precipitation (strong downdraft-like microbursts). SWRS and LWRS are off-board systems aiding the aircraft in the airspace. All three systems are considered reliable. Nevertheless, AWRSs are considered to have the highest veracity, particularly when the weather in question comes from the area ahead the airplane. On the other hand, SWRSs are considered today to have the lowest veracity of the three systems. The variation in veracity is due to their way to sense and their proximity to the weather condition.
The challenging issue in the convective weather airspace situation is to determine (by sensing the weather conditions) how safe the airspace is to fly though. Thus, the AWRSs, SWRSs, and LWRSs are essential, including in the way the acquired information from all three sources is processed. The AWRS is an on-board sensing system of the aircraft flying in the airspace, while the SWRS and LWRS are off-board sensing systems that are made available to this aircraft via the airborne network and the ground infrastructure.
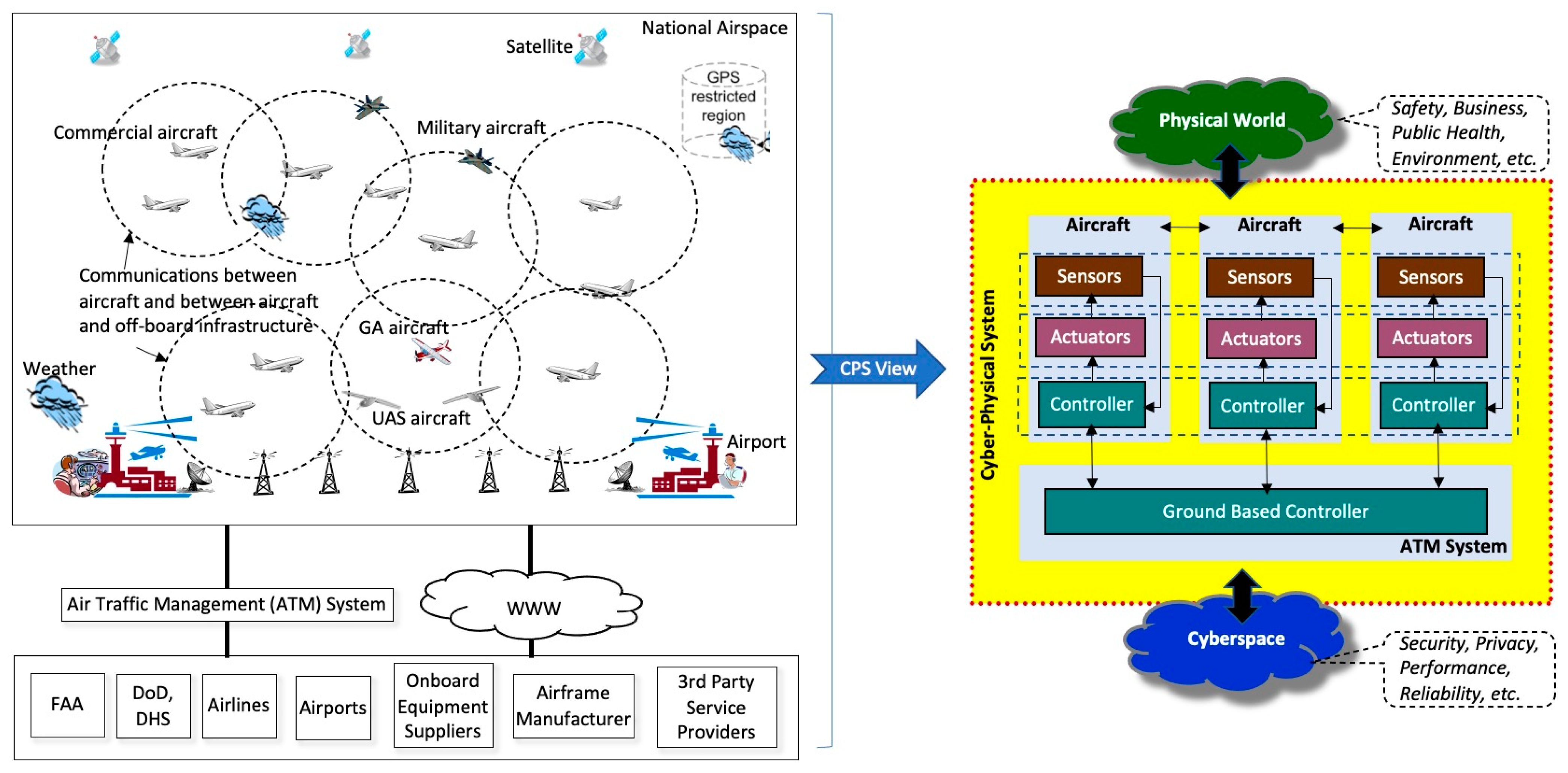
Figure 8 shows the air-space situation and a cyber-physical view of the airspace situation in Scenario 1.
The physical world information sensed by these weather radar systems together (i.e., LRWS, SRWS, and ARWS) are uploaded to the cyberspace, where it can be shared with the stakeholders and other aircraft in the airspace and airports. Such multi-source information can be combined in order to build a more reliable model of weather conditions to assess the air-space situation by means of the AAO-based DSS. The AAO queries can be visualized by air traffic controllers to support their decisions on the above situation. Additionally, aviators and pilots of remotely-piloted aircraft as well as on-board implementation of the AAO in UAVs could make use of the information. Operators can run AAO queries as to the airspace situations where the different weather conditions take place.
The reliability of the weather model depends on the
veracity of the information gathered. Visual satellite images and acoustic radar images can be analyzed and integrated based on their
veracity. Space and time are the main drivers to the
veracity metrics in a scenario. Applying the
veracity metrics within the PR-OWL framework requires defining the number of sensors involved, the criteria used to evaluate
veracity, and the associated query to be answered. The method selected is the Multi-Entity Bayesian Network (MEBN) [
65] with the associated theory (MTheory). Next, the paper provides an example describing how the AAO MTheory is formed, how it is used to instantiate the BN needed to answer a query on the meteorological conditions in the example, and how the model can be used to perform other queries on that same scenario.
Figure 9 shows a couple of notional MFrags (templates for building BNs) for the AAO MTheory. The model was built using UnBBayes, an open source, Java-based probabilistic graphical framework that can build probabilistic ontologies [
66]. Note that the concepts of the AAO ontology were used in a “drag-and-drop” fashion to create the MFrags that convey the probabilistic aspects of the ontology, allowing for a tight synchronization between the logical and probabilistic aspects of the ontology. In the model, the three different types of MFrag nodes can be seen: Context, Input, and Resident nodes.
Resident nodes are the random variables that form the core subject of an MFrag. The MFrag defines a local distribution for each resident node as a function of the combination of the states of its parents in the fragment graph. Resident nodes can be discrete or continuous. There are two discrete resident nodes in the
Veracity MFrag, depicted as yellow rounded rectangles in
Figure 9. In general, resident nodes are random variables that convey the uncertainty related to a triple (subject, predicate, and object) in the domain. For instance, the node hasVeracity (sensor, veracity) is a Boolean random variable that conveys the probability of a given sensor (subject) to have
veracity (hasVeracity predicate) as True (one of the two valid states of the object
Veracity). Likewise, the resident node DistanceFromSubject (sensor, range) conveys the uncertainty related to a given sensor to be within range of the subject it is sensing. The uncertainty is conveyed in the form of a local probability distribution that, in the case of the latter, defines how likely it is that the range of the sensor is in one of its valid states (i.e., either one of (AboveRange, BorderlineRange, MediumRange, CloseRange)).
Input nodes, depicted as gray trapezoids in
Figure 9, serve as “pointers” referring to resident nodes in other MFrags. Input nodes influence the local distributions of the resident, but their own distributions are defined in the MFrags in which they are resident. For instance, the input node hasVeracity (sensor,
veracity) from the Weather Conditions MFrag is a pointer to its associated resident node defined in the
Veracity MFrag. In this case, it can be instantiated as many times as needed to cover the situation at hand.
Context nodes are Boolean (i.e., true/false) random variables representing conditions that must be satisfied for the probability distribution of the resident nodes in an MFrag to apply. The same way it happens with input nodes, context nodes have distributions defined in their respective resident MFrags.
To illustrate the UnBBayes model, the MFrags in
Figure 9 are used to evaluate a situation in which there are three sensors, and each would have its
veracity assessed by two distinct criteria (accuracy and observational sensitivity in this case).
Figure 10 depicts the BN (technically, a Situation Specific BN, or SSBN) that resulted from the instantiation of the MFrags in the AAO MTheory upon the input of three sensors (AWRS, SWRS, and LWRS) and two criteria to evaluate
Veracity (Observational Sensitivity and Accuracy). That is,
veracity is evaluated based on only two attributes of the URREF, sensitivity and accuracy. The sensitivity estimates the ability of a sensor to capture enough elements of a given subject (e.g., the minimal strength of a signal that can be captured by an acoustic sensor), while the accuracy assesses how close its readings are to reality.
For simplicity, the states of the reports are using the same terminology employed by FAA in its WSR-88D Doppler radar’s precipitation mode [
67], and a scheme similar to the one used to define the states in the sensitivity criteria would be used. To illustrate the probabilistic relationships involved,
Figure 11 shows the Conditional Probability Table (CPT) used to calculate the posterior marginal probability of the SWRS report (node ProducesSWRSReport (SWRS, SWRSrep)). The distributions depicted in the table in
Figure 11, one for each combination of potential weather conditions and
veracity states, were defined by a subject matter expert (SME), but in an actual system they would have been assessed through a combination of sensor characteristics, collected data, automated learning, and other data analytic processes available in any Bayesian framework.
In this example, it is assumed that the use of a probabilistic framework leverages the URREF definitions and the data accruing from an ATM system to estimate the
veracity of a specific output.
Figure 12 illustrates the result of a query on weather conditions for a specific area, in which the system’s findings are input to the model (nodes in dark grey color), and the resulting posterior probability is calculated. For instance, the example assumes that the SWRS returned a Heavy conditions report, the AWRS returned an Extreme conditions report, and the LWRS returned a Moderate conditions report, all referring to the same subject (weather on FL 400 of SBRE FIR’s Sector 3). The example in
Figure 12 also assumes the ATM system has knowledge of all the associated distances and criteria computed, which are inserted into the model as findings. After the network is compiled, the final result is a 68.7% chance of Extreme weather in that area.
Note that the above example was notional and did not use actual sensor performance or data collected from the field, as it would in a general usage of this framework. Yet, it is sufficient to show the strengths of the proposed approach, which is capable of (1) using the URREF and AAO ontologies to automatically generate evaluation models; (2) adapt to any combination of sensors, criteria needed, sensor parameters (e.g., distance), and others to build a dynamic model of the environment; and (3) reuse this model to follow the evolving situation as new data from the scenario accrues.
A further example is explored by entering the same results in the system as if it only had one sensor at a time, while keeping the same conditions (i.e., the two criteria and the original results from the system).
Table 6 presents the posterior probabilities obtained for the weather conditions at FL 400 of SBRE sector 3.
The AAO query is regarding the possibilities for Flight BA249 (a Boeing 787 airplane) to encounter adverse weather conditions that make the airplane change its route. The extreme weather condition classified as “massive precipitation” (i.e., weather causing a radar echo with reflectivity greater than 50 dB) is the only one where it is considered necessary to make Flight BA249 change its airway.
Figure 13 presents inferred classes/individuals (reasoned knowledge) from the AAO when the probabilities from
Table 6 are incorporated into the AAO.
Figure 13 shows the reasoning path (in green), followed by the reasoner to determine the AAO query results (“aircraft must be rerouted”).
Figure 14 shows the AAO query results from different queries carried out to identify whether Flight BA249 has to modify its route on its way to land in GIG. The results consider the
veracity of each radar to detect the extremely strong storm on the Brazilian northeast coast. The sensor results seek to answer the question of what the chance is for Flight BA249 to have to modify its airway because of the weather conditions ahead. The chances depend on the
veracity of the information provided by the weather radars.
The AAO query results from the SSBN (as shown in
Figure 14), considering individual radars and combined radars, suggest that (from left to right):
Thus, in this example, the resulting query would likely result in Flight BA249 changing its route so as to avoid the extreme weather in Sector 3 of SBRE. When analyzing the results from
Table 6, it is easy to perceive the weight of the
veracity calculated for each sensor. In the example, the environmental conditions deemed the AWRS to be the sensor with the highest
veracity (65.8%), even though it does not have the highest observational sensitivity.
The Flight BA249 example was tailored to reflect a dissonance between the sensors (which is rarely seen in extreme weather conditions) as a means to illustrate how the veracity of each sensor impacts the overall results of the system. Note that the calculations for veracity in this example considered two criteria (Observational Sensitivity and Accuracy), but the system is flexible enough to produce calculations when other criteria are also considered.
5.2. Airspace Situation 2: Natural Disaster and Unmanned Aerial Vehicles
Scenario 2 focuses on the North Atlantic Tracks that connect European countries with North America. This includes all the flight routes in which aircraft fly over or near Iceland. The application scenario considers that the Eyjafjallajokull volcano is in the early stages of eruption, throwing volcanic ash up into the atmosphere. The ash cloud contains pulverized pieces of rocks, minerals, and volcanic glass, which greatly damage the jet engines of aircraft flying nearby the volcano in the above air corridors. As a real and serious threat for aviation, the eruption of Eyjafjallajokull resulted in the cancelation of thousands of flights in April 2010, leading to millions of stranded passengers in Europe [
67].
The challenging issue in the ash-eruption airspace situation is to determine how serious the threat is by having an accurate reading of the characteristics of the ash cloud (e.g., density, size, location, etc.). Sensing mechanisms are crucial, as is the way the acquired information is processed. Images from sensing systems, such as meteorological satellites, weather radars, and any extra survey support such as special manned aircraft and UAVs, can be used to gather meaningful data and get a picture of the situation.
Figure 15 shows a cyber-physical view of the airspace situation in Scenario 2.
Similar to the description in Scenario 1, the physical-world information sensed by these airborne, space, and land-based sensors together are uploaded to cyberspace, where it can be shared with the stakeholders and aircraft in the airspace and airports. Such multi-source information can be combined in order to build a more reliable model of the ash cloud to assess the airspace situation by means of the AAO-based DSS. The AAO queries can be visualized by air traffic controllers to support their decisions on the above situation. Additionally, the aviators and pilots of remotely-piloted aircraft as well as on-board implementation of the AAO in UAVs could make use of this information. The users can run AAO queries as to the airspace situation in the proximity of the Eyjafjallajokull volcano.
The International Civil Aviation Organization (ICAO) created a worldwide system of nine Volcanic Ash Advisory Centers (VAACs) in the late 1990s to help mitigate the effects of volcano eruptions on air transportation. The VAACs run models for assessing the transport and dispersion of volcanic ash and issue advisory information on the extent of the observed and forecast movement of the ash [
67]. In the case of the Eyjafjallajokull volcano, the monitoring and advisory was conducted by the London VAAC. Models of ash-cloud movement and dispersion are important for providing such services and are usually evaluated by satellite analyses. One example of such a model is the NOAA/Air Resources Laboratory Hybrid Single-Particle Lagrangian Integrated Trajectory (HYSPLIT) transport and dispersion model [
68]. Stunder et al. [
69] used HYSPLIT to make comparisons of archived volcanic ash forecast and analysis areas to reliability estimate the volcanic ash forecast area (VAFAR) for hypothetical large eruptions of several volcanoes.
VAFAR and other metrics for assessing the reliability of ash-cloud models demonstrate how important such results are for air transportation activities. The reliability of the ash-cloud model depends on the
veracity of the information gathered. Thus, visual satellite images, acoustic radar images, and any other images collected from manned science aircraft or UAVs can be analyzed and integrated based on their
veracity. The same modelling approach used in the previous example can also be applied in the modelling the
veracity of the sensors involved in this scenario. However, because node hasWeather (area, weatherCondition) maps a weather condition to an area, it addresses the sensor’s
veracity for that whole area, which might or might not fully overlap with the ash cloud. Thus, the initial model is extended by adding the
AtmosphericEventMFrag, which allows us to specify the
veracity of a sensor regarding one atmospheric event within an area and consider the weather in that area.
Figure 16 shows the extended model.
Following the same procedures as in the model for Example 1, different values for the CPTs are entered for the nodes, reflecting the impact of the different factors. In this case, two sensors are considered as providing information on the atmospheric accumulation of volcanic ash: one taken from a satellite image report (
EOsatImg) and another from a sensor on-board a UAVs (
UAVdata). Both sensors had a higher probability of a concentration between 2000 and 4000 micrograms per cubic meter of volcanic ash.
Table 7 brings the posterior probabilities obtained for the concentration of volcanic ash.
In this case, the veracity of the EOsatImg report for the conditions observed was 91.4%, while the UAVs’ sensor obtained a roughly 6% improvement over the satellite report at 97.05%. As a result, the combined sensor had intermediate results, but tended to agree slightly more with the UAVs’ data. Note that we applied the same MFrags for this scenario, with the CPTs for the new sensors being estimated. As in the previous model, different estimates would yield a different reading for the combined concentration, as well as for the other parameters in the model. However, the goal was to show how the technique would work for different scenarios, and an experiment with real sensor performance data would likely have changes in the magnitude of the results but not in the overall trends (i.e., the combined sensor’s posterior probabilities would still be closer to the UAV ones). The AAO query regards the possibilities for commercial flights to encounter a dangerous ash cloud that causes the airplane to change its route. The ash-cloud condition is classified as follows:
“Very low ash concentration” when it is below 200 micrograms;
“Low ash concentration” when it is between 200 and 2000 micrograms;
“High ash concentration” when it is between 2000 and 4000 micrograms;
“Very high ash concentration” when it is above 4000 micrograms.
Figure 16 presents inferred classes/individuals (reasoned knowledge) from the AAO when the probabilities from
Table 6 are incorporated into the AAO.
Figure 17 shows the reasoning path (in green) followed by the reasoner to determine the AAO query results (“aircraft must be rerouted”).
Figure 18 shows the AAO results from different queries carried out to assess whether an aircraft must modify its route on its way from Europe to America, or all the way around. The results consider the
veracity of EOsatImg and the UAV sensors to detect the concentration in the ash cloud from the Eyjafjallajokull volcano. The query results answer the question of what the chance are for the above aircraft to have to modify its airway because of the ash cloud. The chances depend on the
veracity of the information provided by the two sensing mechanisms (satellite images and UAV sensors).
The AAO query results from the SSBN considering the satellite and the UAV instruments, and a combination of their measurements, suggest that (from left to right):
High chance of modifying the airplane route (when EOsatImg detects the ash concentration from the ash cloud). Aircraft should change route to avoid the ash cloud on their airway as the EOsatImg radar suggests a probability of 53.60% for an ash concentration between 2000 and 4000 micrograms in the ash cloud. The veracity of this query is based on a veracity of 91.40%. This suggestion is less veracious than suggestion 2.
Very-high chance of modifying the aircraft route (when UAVs detect the ash cloud concentration). Any aircraft flying near the volcano must change route to avoid the ash cloud on its way because the UAVs’ data radar suggests a probability of 74.90% for an ash concentration between 2000 and 4000 micrograms in the ash cloud. The veracity of this query is based on a veracity of 97.05%. This suggestion is the most veracious out of the three suggestions.
The combined sensing sources overwhelmingly suggest the ash cloud has an ash density that makes aircraft divert their route (probability of 64.60% for an ash concentration between 2000 and 4000 micrograms in the ash cloud). The veracity of this suggestion is 88.70% (multiplication of the above veracities, i.e., 91.40% and 97.05%).




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}