
A Sub-Synchronous Oscillation Suppression Strategy Based on Active Disturbance Rejection Control for Renewable Energy Integration System via MMC-HVDC

 and
and 
Abstract
:1. Introduction
2. Modeling of PMSG-Based Wind Farm Integration System via MMC-HVDC
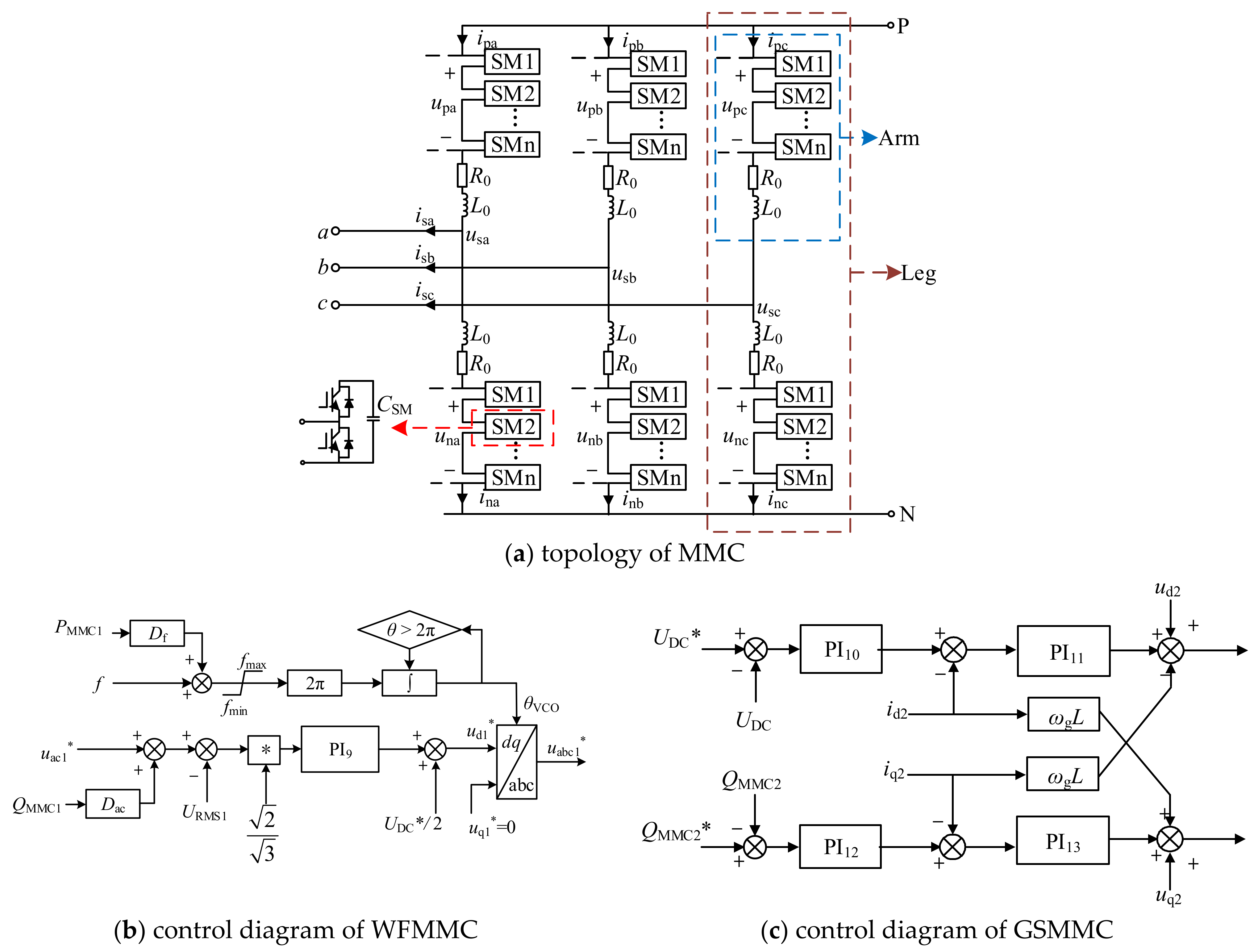
2.1. Topology and Control Principles of the System
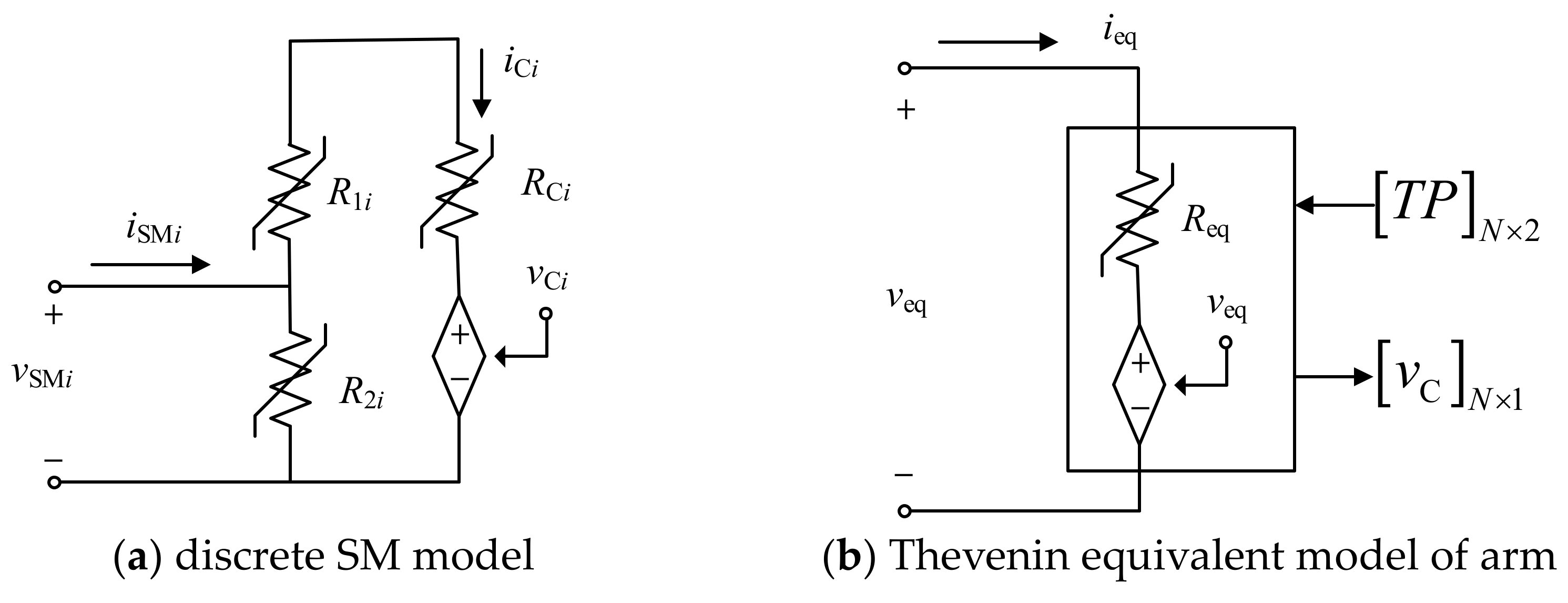
2.2. Simulation Model of the System
3. Stability Analysis and Key Influencing Parameters Analysis of the System
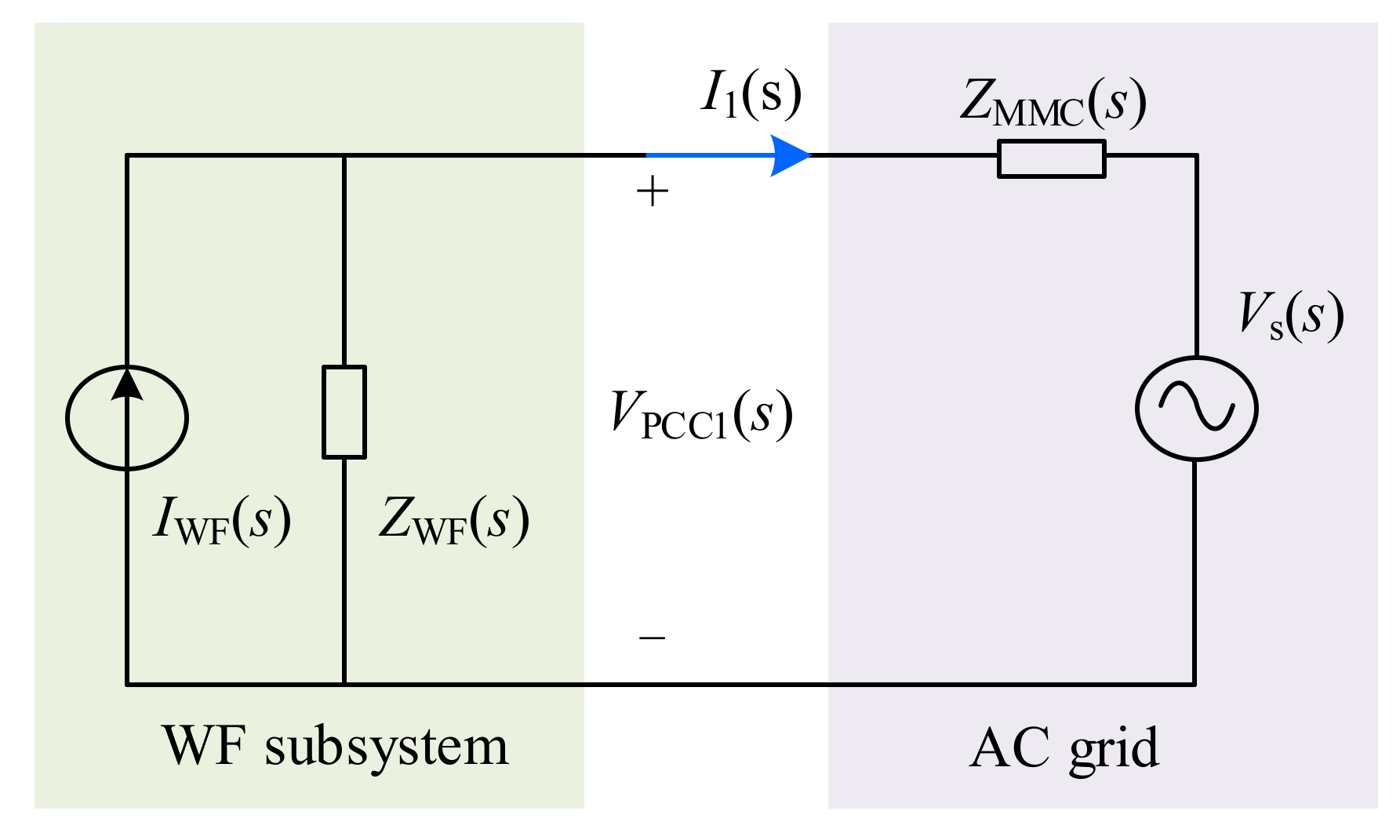
3.1. Stability Analysis of the System
3.2. Analysis of Key Influencing Parameters
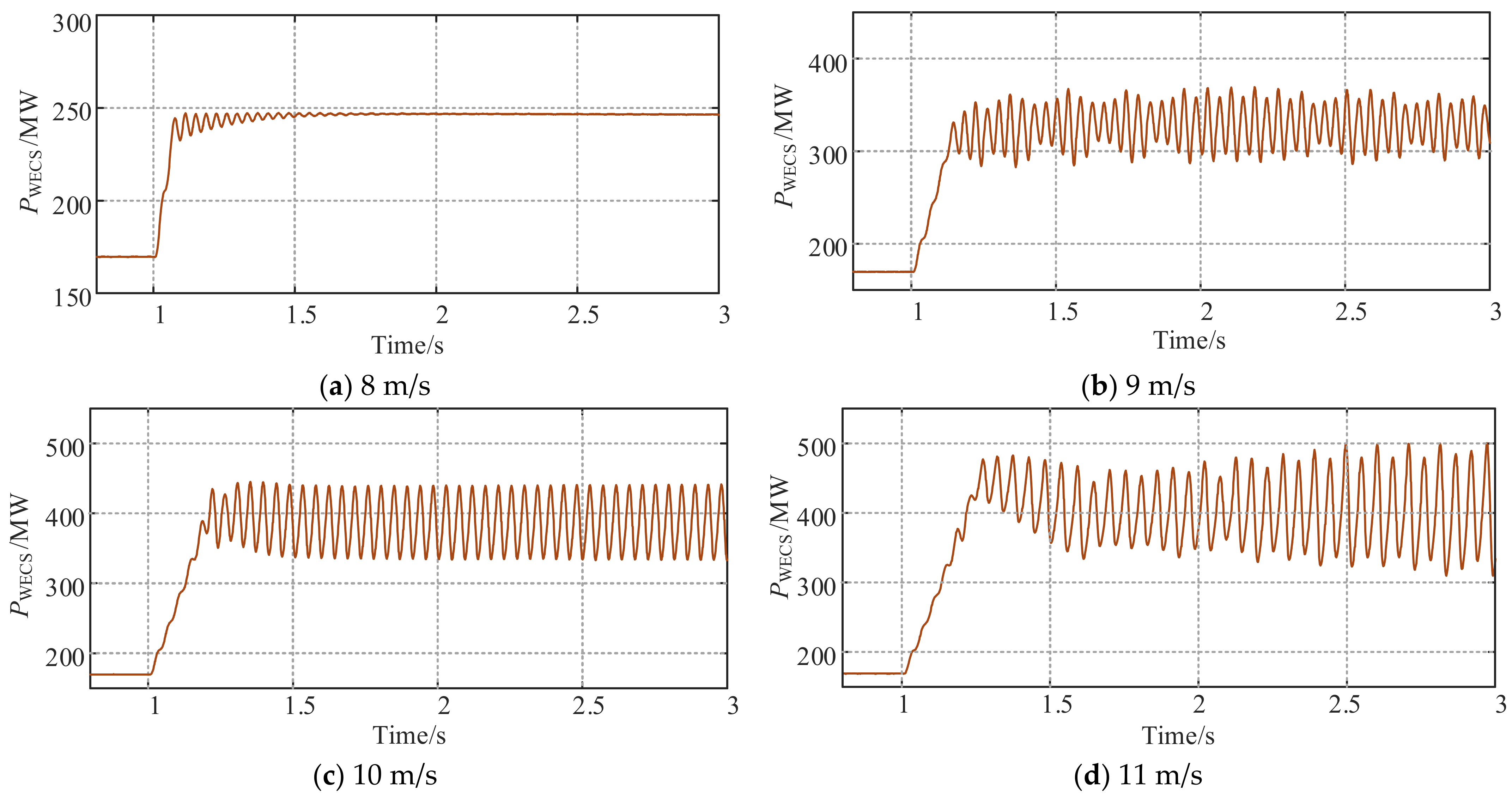
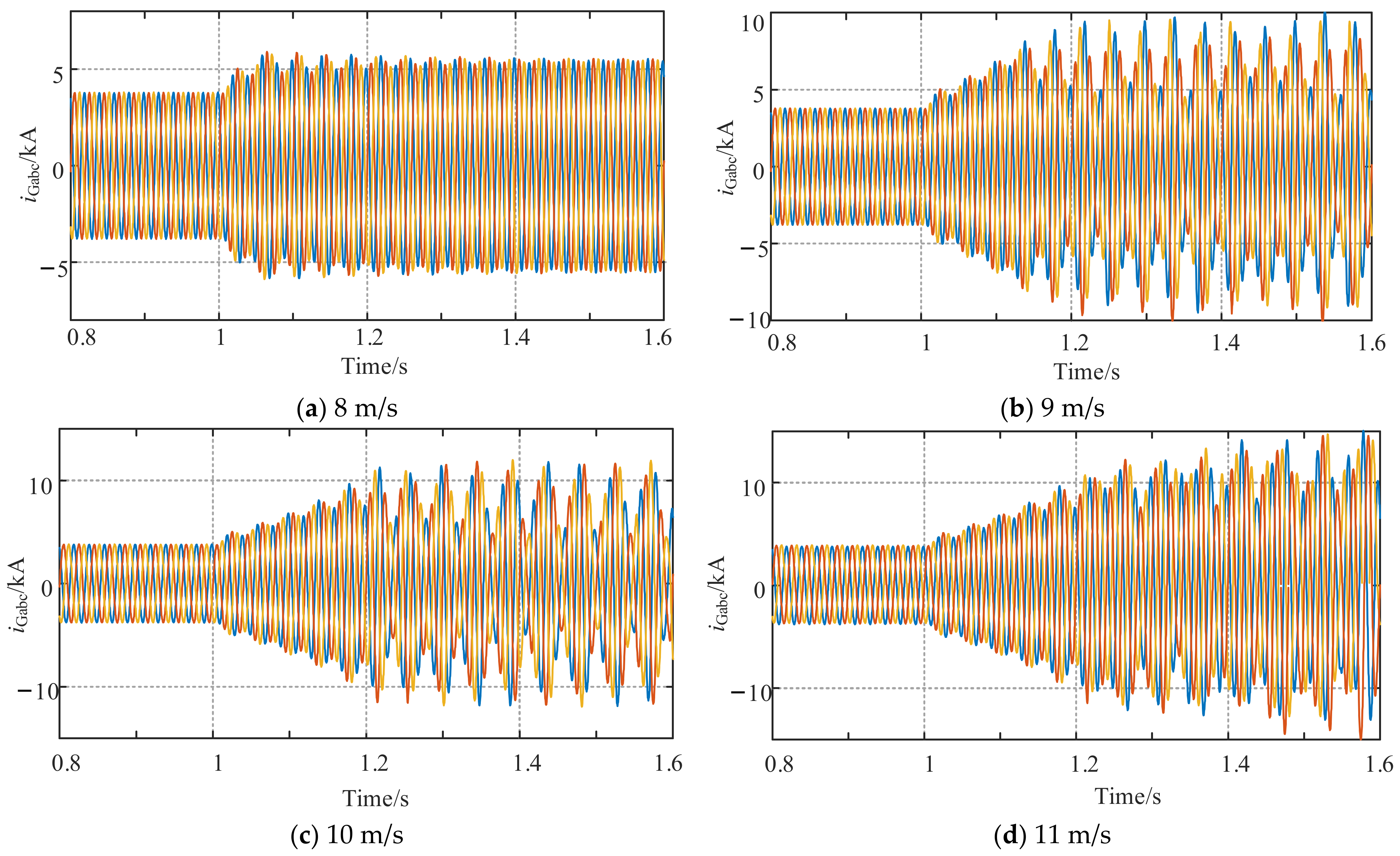
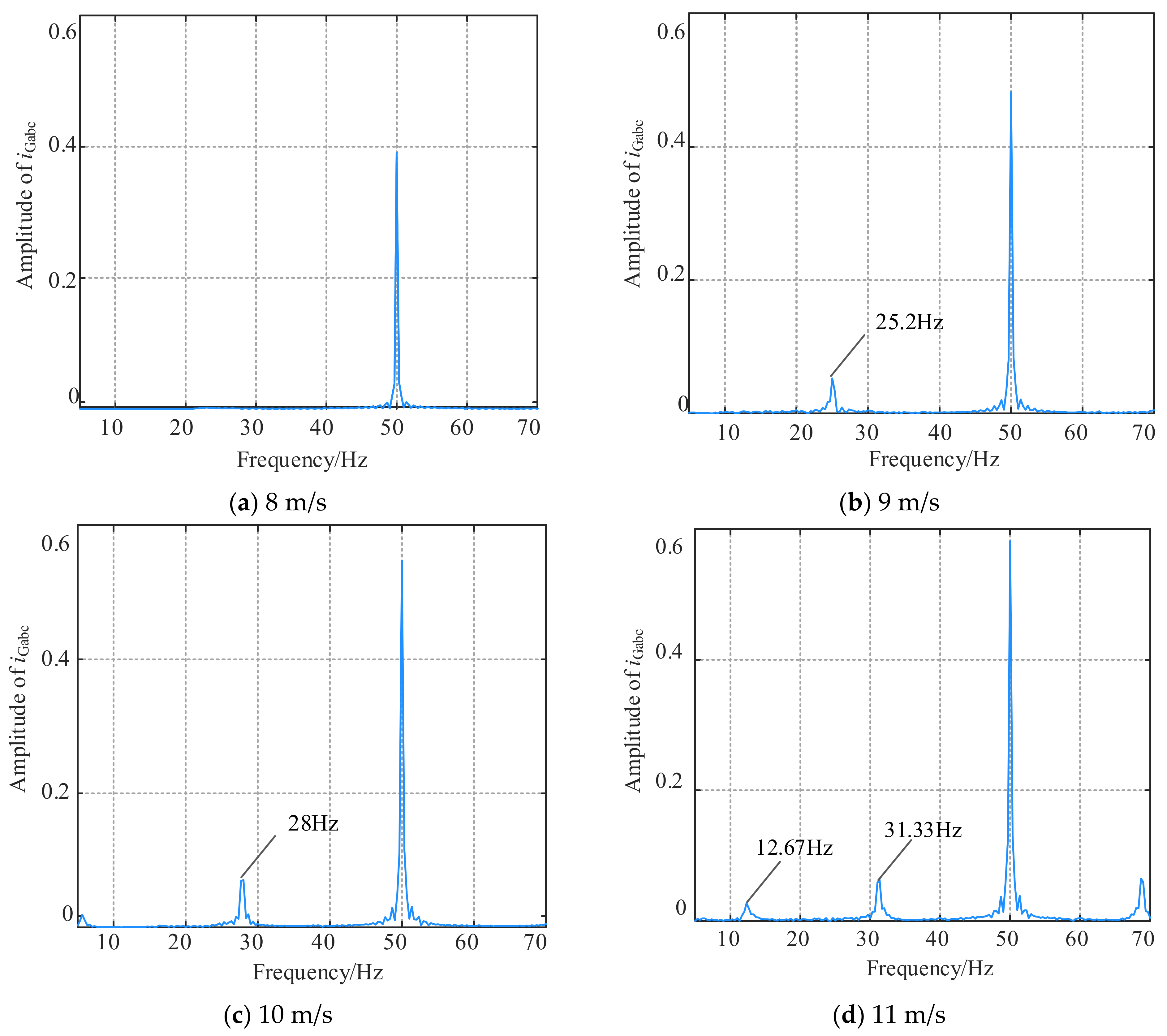
3.2.1. Impact of Wind Speed
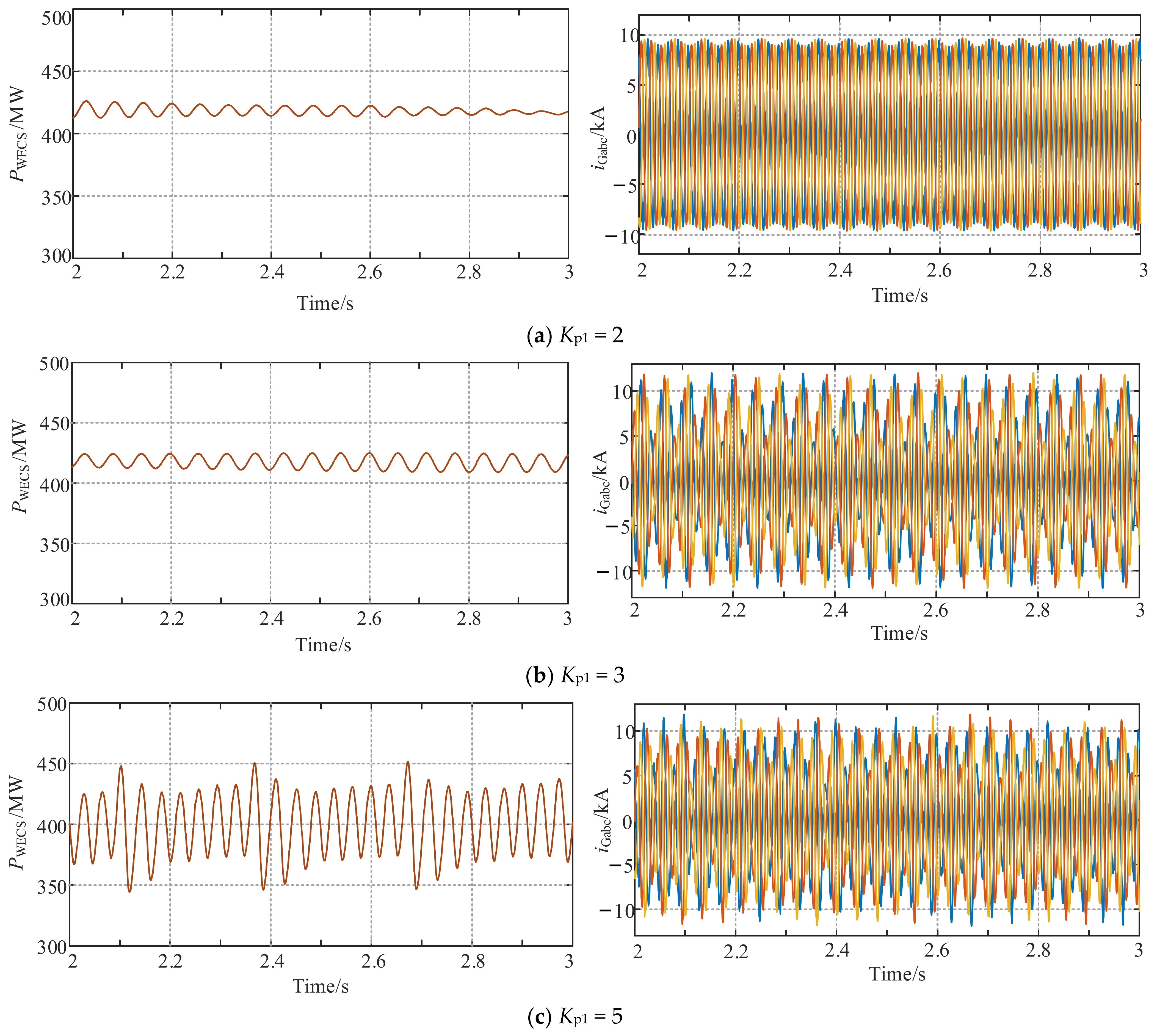
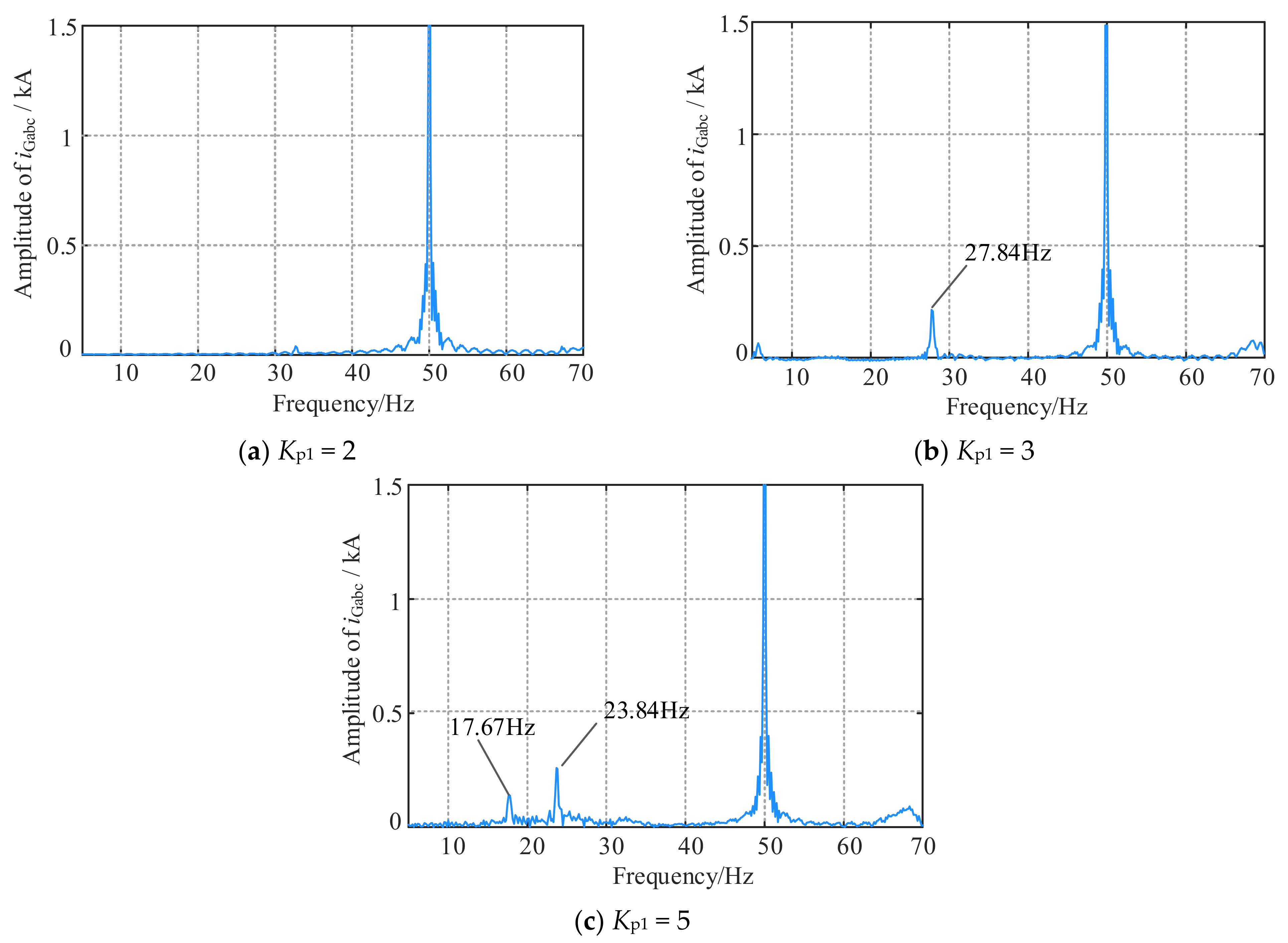
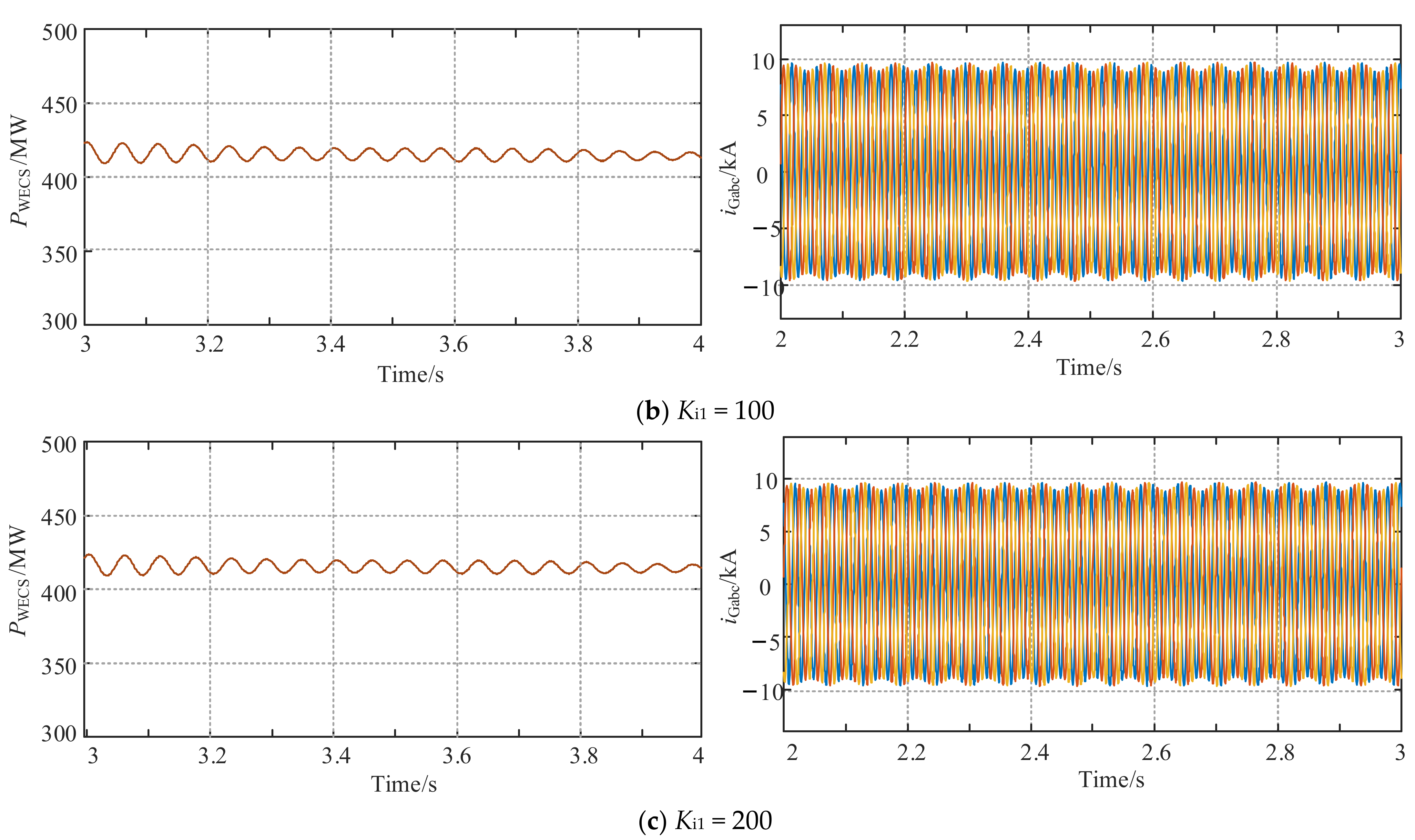
3.2.2. Impact of Control Parameters
4. Design of An Additional Sub-Synchronous Damping Controller Based on ADRC
4.1. Active Disturbance Rejection Control Theory
4.2. Additional Sub-Synchronous Damping Controller Based on ADRC
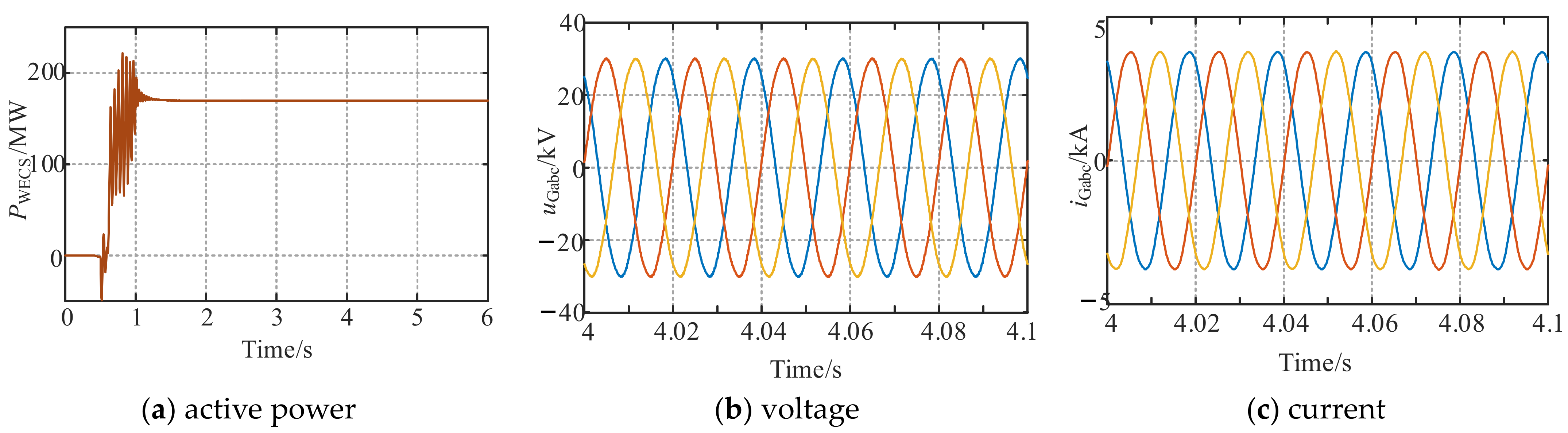
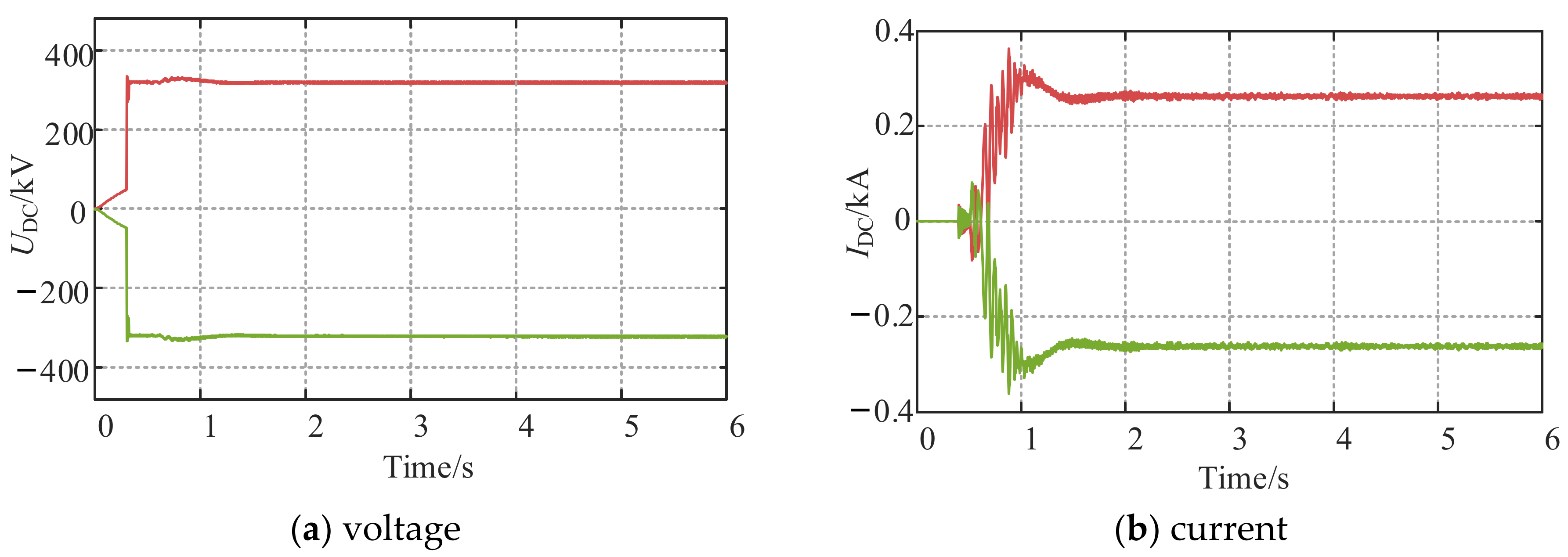
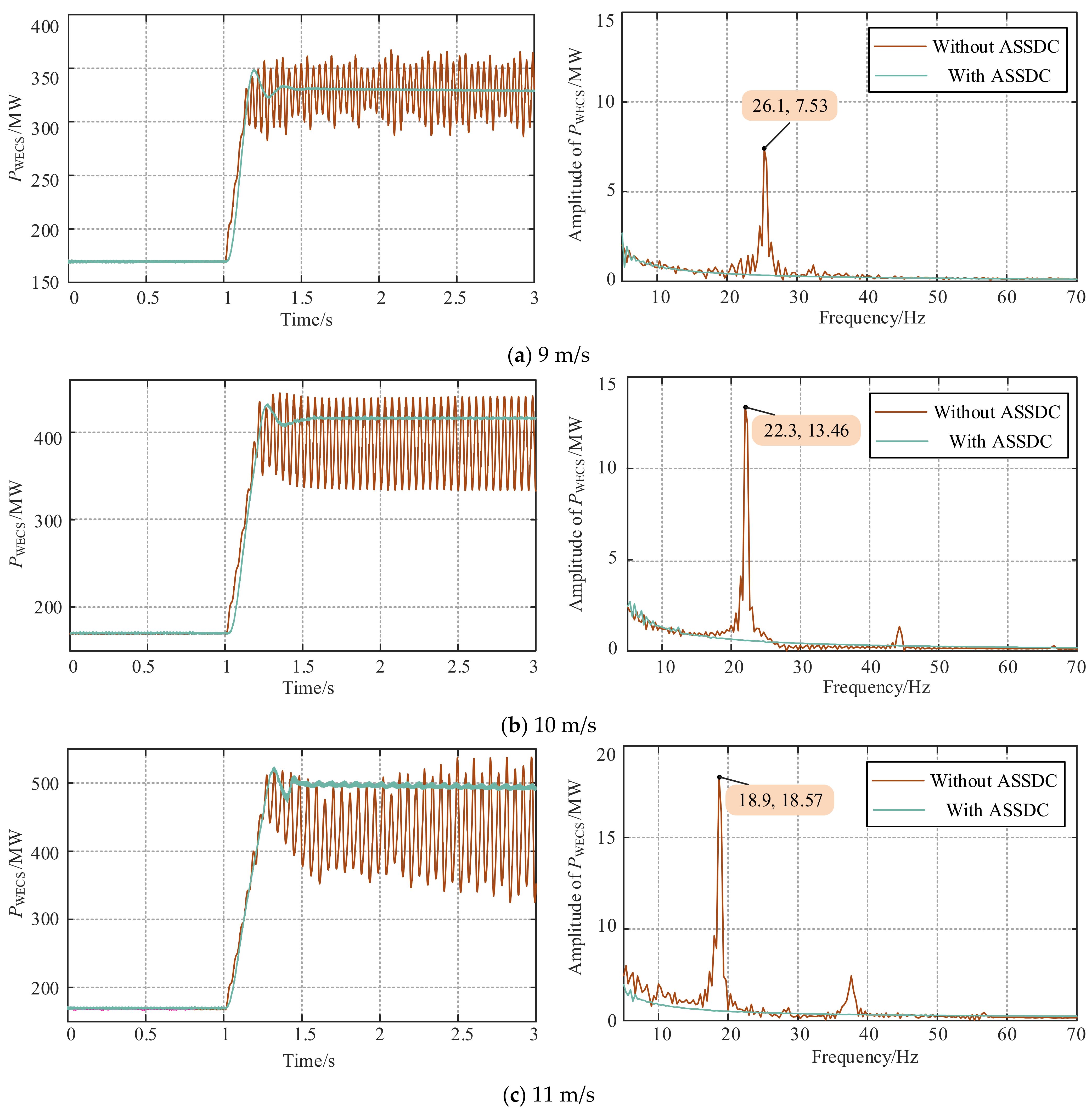
5. Simulation Verification
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Perez, M.A.; Bernet, S.; Rodriguez, J.; Kouro, S.; Lizana, R. Circuit Topologies, Modeling, Control Schemes, and Applications of Modular Multilevel Converters. IEEE Trans. Power Electron. 2015, 30, 4–17. [Google Scholar] [CrossRef]
- Debnath, S.; Qin, J.; Bahrani, B.; Saeedifard, M.; Barbosa, P. Operation, Control, and Applications of the Modular Multilevel Converter: A Review. IEEE Trans. Power Electron. 2015, 30, 37–53. [Google Scholar] [CrossRef]
- Lyu, J.; Dong, P.; Shi, G. Subsynchronous Oscillation and Its Mitigation of MMC-Based HVDC With Large Doubly-Fed Induction Generator-Based Wind Farm Integration. Proc. CSEE 2015, 35, 4852–4860. [Google Scholar] [CrossRef]
- Li, H.; Shair, J.; Zhang, J.; Xie, X. Investigation of Subsynchronous Oscillation in a DFIG-based Wind Power Plant Connected to MTDC Grid. IEEE Trans. Power Syst. 2022, 38, 3222–3231. [Google Scholar] [CrossRef]
- Li, H.; Xie, X.; Chai, W.; Jiang, Q. Subsynchronous Oscillation Events in an MTDC-connected Renewable Energy System. In Proceedings of the 2021 International Conference on Power System Technology (POWERCON), Haikou, China, 8–9 December 2021; pp. 1701–1706. [Google Scholar] [CrossRef]
- Wang, W.; Li, G.; Guo, J. Large-Scale Renewable Energy Transmission by HVDC: Challenges and Proposals. Engineering 2022, 19, 252–267. [Google Scholar] [CrossRef]
- Zheng, L.; Ma, S. DC-bus voltage damping characteristic analysis and optimization of grid-connected PMSG. Electr. Power Syst. Res. 2023, 216, 108980. [Google Scholar] [CrossRef]
- Lyu, J.; Cai, X.; Molinas, M. Optimal Design of Controller Parameters for Improving the Stability of MMC-HVDC for Wind Farm Integration. IEEE J. Emerg. Sel. Top. Power Electron. 2018, 6, 40–53. [Google Scholar] [CrossRef] [Green Version]
- Sheng, B.; Lin, T.; Chen, B.; Chen, R.; Guo, Z.; Xu, X. Coordination and Optimization of Controller Parameters for Subsynchronous/Super-Synchronous Oscillation in New Energy Delivery Systems. Trans. China Electrotech. Soc. 2019, 34, 984–992. [Google Scholar] [CrossRef]
- Wang, H.; Zhang, Y.; Liao, J.; Wang, Y. Medium and high-frequency resonance suppression strategy in flexible direct grid connected system based on impedance sensitivity analysis. Power Syst. Technol. 2023, 1–12. [Google Scholar] [CrossRef]
- Rafique, Z.; Khalid, H.M.; Muyeen, S.M.; Kamwa, I. Bibliographic review on power system oscillations damping: An era of conventional grids and renewable energy integration. Int. J. Electr. Power Energy Syst. 2022, 136, 107556. [Google Scholar] [CrossRef]
- Mohammadpour, H.A.; Siegers, J.; Santi, E. Controller design for TCSC using observed-state feedback method to damp SSR in DFIG-based wind farms. In Proceedings of the 2015 IEEE Applied Power Electronics Conference and Exposition (APEC), Charlotte, NC, USA, 15–19 March 2015; pp. 2993–2998. [Google Scholar] [CrossRef]
- Liu, Y.; Zheng, J.; Chen, Q.; Duan, Z.; Tian, Y.; Ban, M.; Li, Z. MMC-STATCOM supplementary wide-band damping control to mitigate subsynchronous control interaction in wind farms. Int. J. Electr. Power Energy Syst. 2022, 141, 108171. [Google Scholar] [CrossRef]
- Morshed, M.J.; Fekih, A. A Probabilistic Robust Coordinated Approach to Stabilize Power Oscillations in DFIG-Based Power Systems. IEEE Trans. Ind. Inform. 2019, 15, 5599–5612. [Google Scholar] [CrossRef]
- Zhao, Q.; Zhang, Y.; Xie, X.; Zhang, Y.; Zhang, D.; Chen, Z. Mitigation of Subsynchronous Oscillations Based on Renewable Energy Hydrogen Production System and Its Supplementary Damping Control. Proc. CSEE 2019, 39, 3728–3735. [Google Scholar] [CrossRef]
- Shao, B.; Zhao, S.; Yang, Y.; Gao, B.; Wang, L.; Blaabjerg, F. Nonlinear Subsynchronous Oscillation Damping Controller for Direct-Drive Wind Farms With VSC-HVDC Systems. IEEE J. Emerg. Sel. Top. Power Electron. 2022, 10, 2842–2858. [Google Scholar] [CrossRef]
- Yao, J.; Wang, X.; Li, J.; Liu, R.; Zhang, H. Sub-Synchronous Resonance Damping Control for Series-Compensated DFIG-Based Wind Farm With Improved Particle Swarm Optimization Algorithm. IEEE Trans. Energy Convers. 2019, 34, 849–859. [Google Scholar] [CrossRef]
- Shen, R.; Yang, S.; Zhang, T.; Hao, Z.; Zhang, B.; Ge, H. Suppression Method of Sub-/Super-synchronous Oscillation in D-PMSG Wind Farm Grid-connected Power Systems. In Proceedings of the 2021 IEEE 4th International Electrical and Energy Conference (CIEEC), Wuhan, China, 28–30 May 2021; pp. 1–5. [Google Scholar] [CrossRef]
- Shair, J.; Xie, X.; Yang, J.; Li, J.; Li, H. Adaptive Damping Control of Subsynchronous Oscillation in DFIG-Based Wind Farms Connected to Series-Compensated Network. IEEE Trans. Power Deliv. 2022, 37, 1036–1049. [Google Scholar] [CrossRef]
- Leon, A.E.; Mauricio, J.M. Mitigation of Subsynchronous Control Interactions Using Multi-Terminal DC Systems. IEEE Trans. Sustain. Energy 2021, 12, 420–429. [Google Scholar] [CrossRef]
- Xue, T.; Lyu, J.; Wang, H.; Cai, X. A Complete Impedance Model of a PMSG-Based Wind Energy Conversion System and Its Effect on the Stability Analysis of MMC-HVDC Connected Offshore Wind Farms. IEEE Trans. Energy Con-Version 2021, 36, 3449–3461. [Google Scholar] [CrossRef]
- Liu, B.; Li, Z.; Dong, X.; Yu, S.S.; Chen, X.; Oo, A.M.T.; Lian, X.; Shan, Z.; Liu, X. Impedance Modeling and Controllers Shaping Effect Analysis of PMSG Wind Turbines. IEEE J. Emerg. Sel. Top. Power Electron. 2021, 9, 1465–1478. [Google Scholar] [CrossRef]
- Gnanarathna, U.N.; Gole, A.M.; Jayasinghe, R.P. Efficient Modeling of Modular Multilevel HVDC Converters (MMC) on Electromagnetic Transient Simulation Programs. IEEE Trans. Power Deliv. 2011, 26, 316–324. [Google Scholar] [CrossRef] [Green Version]
- Corti, F.; Gulino, M.-S.; Laschi, M.; Lozito, G.M.; Pugi, L.; Reatti, A.; Vangi, D. Time-Domain Circuit Modelling for Hybrid Supercapacitors. Energies 2021, 14, 6837. [Google Scholar] [CrossRef]
- Hu, X.; Li, S.; Peng, H. A comparative study of equivalent circuit models for Li-ion batteries. J. Power Sources 2012, 198, 359–367. [Google Scholar] [CrossRef]
- Staņa, Ģ.; Voitkāns, J.; Kroičs, K. Supercapacitor Constant-Current and Constant-Power Charging and Discharging Comparison under Equal Boundary Conditions for DC Microgrid Application. Energies 2023, 16, 4167. [Google Scholar] [CrossRef]
- Zong, H.; Zhang, C.; Lyu, J.; Cai, X.; Molinas, M.; Rao, F. Generalized MIMO Sequence Impedance Modeling and Stability Analysis of MMC-HVDC With Wind Farm Considering Frequency Couplings. IEEE Access 2020, 8, 55602–55618. [Google Scholar] [CrossRef]
- Yin, R.; Sun, Y.; Wang, S.; Zhao, B.; Wu, G.; Qin, S.; Zhao, Y.; Wang, T. The Interaction Mechanism Analysis Among the Different Control Loops of the Direct-drive Wind Turbine Connected VSC-HVDC Systems. Proc. CSEE 2022, 42, 3627–3642. [Google Scholar] [CrossRef]
- Ma, J.; Yang, Z.; Du, W.; Shen, Y.; Cheng, P. An active damping control method for direct-drive wind farm with flexible DC transmission system based on the remodeling of dynamic energy branches. Int. J. Electr. Power Energy Syst. 2022, 141, 108004. [Google Scholar] [CrossRef]
- Wang, D.; Zhao, J.; Wang, C.; Zhu, X.; Zhou, Z.; Li, W.; Jia, Y.; Li, Z.; Wu, S.; Meng, J. An adaptive linear active disturbance rejection control method for HVDC transmission system. Energy Rep. 2023, 9, 3282–3289. [Google Scholar] [CrossRef]
- Han, J. From PID to Active Disturbance Rejection Control. IEEE Trans. Ind. Electron. 2009, 56, 900–906. [Google Scholar] [CrossRef]
- Jiang, S.; Liu, C.; Li, J. Mitigation Strategy of Sub/Supersynchronous Oscillation of PMSG Based on Additional Active Disturbance Rejection Controller. In Proceedings of the 2022 IEEE 5th International Electrical and Energy Conference (CIEEC), Nangjing, China, 27–29 May 2022; pp. 541–548. [Google Scholar] [CrossRef]
- Deb, K.; Pratap, A.; Agarwal, S.; Meyarivan, T. A fast and elitist multiobjective genetic algorithm: NSGA-II. IEEE Trans. Evol. Comput. 2002, 6, 182–197. [Google Scholar] [CrossRef] [Green Version]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Type | Parameters | Values |
|---|---|---|
| Parameters of the PMSG-based wind farm | wind speed | 7 m/s |
| DC bus capacitance | 15 mF | |
| Rated capacity of a wind turbine | 2.5 MVA | |
| Equivalent number of wind turbines | 200 | |
| Rated DC voltage | 1.45 kV | |
| Output voltage of a wind turbine | 0.62 kV | |
| Output voltage of the wind farm | 35 kV | |
| Ratio of T | 35 kV/220 kV | |
| Parameters of MMC-HVDC | DC voltage | ±320 kV |
| Number of unipolar SMs | 100 | |
| Inductance of an arm | 5 mH | |
| Length of DC cables | 200 km | |
| Rated capacity | 600 MVA | |
| Parameters of AC grid | Voltage of the AC grid | 220 kV |
| Rated frequency | 50 Hz |
| Parameter | Value |
|---|---|
| Initial population | 100 |
| Population of the surviving generation | 90 |
| Population of the mating pool | 50 |
| Elite population | 10 |
| Percentage of population to be deviated | 3 |
| Pairing method | random |
| Minimum Value of PWECS | Time of PWECS to Become Stable after Fault Removal | The Total Harmonic Distortion (THD) of Stable PWECS after Fault Removal | |
|---|---|---|---|
| The PMSG-based WECS with ASSDC | 23.1 MW | 1.65 s | 0.14% |
| The PMSG-based WECS without ASSDC | −100 MW | 1.88 s | 3.98% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chao, W.; Deng, C.; Huang, J.; Dai, L.; Min, Y.; Cheng, Y.; Wang, Y.; Liao, J. A Sub-Synchronous Oscillation Suppression Strategy Based on Active Disturbance Rejection Control for Renewable Energy Integration System via MMC-HVDC. Electronics 2023, 12, 2885. https://doi.org/10.3390/electronics12132885
Chao W, Deng C, Huang J, Dai L, Min Y, Cheng Y, Wang Y, Liao J. A Sub-Synchronous Oscillation Suppression Strategy Based on Active Disturbance Rejection Control for Renewable Energy Integration System via MMC-HVDC. Electronics. 2023; 12(13):2885. https://doi.org/10.3390/electronics12132885
Chicago/Turabian StyleChao, Wujie, Chaoping Deng, Junwei Huang, Liyu Dai, Yangxi Min, Yangfan Cheng, Yuhong Wang, and Jianquan Liao. 2023. "A Sub-Synchronous Oscillation Suppression Strategy Based on Active Disturbance Rejection Control for Renewable Energy Integration System via MMC-HVDC" Electronics 12, no. 13: 2885. https://doi.org/10.3390/electronics12132885