1. Introduction
With the significant improvement of hardware performance and operability, unmanned surface vehicles (USVs) come to be widely used in military and daily operations instead of humans due to their safety and scalability [
1,
2]. Especially in high-risk and high-uncertainty missions, USVs can perform tasks endlessly and efficiently on the basis of power support, which has significant effects on important tasks, such as threat monitoring, target reconnaissance, and search and rescue. In the field of intelligent control of USVs, as the foundation for USVs’ performance of other complex tasks, trajectory tracking control has received widespread attention from researchers, and rapid progress has been made in single-USV trajectory tracking [
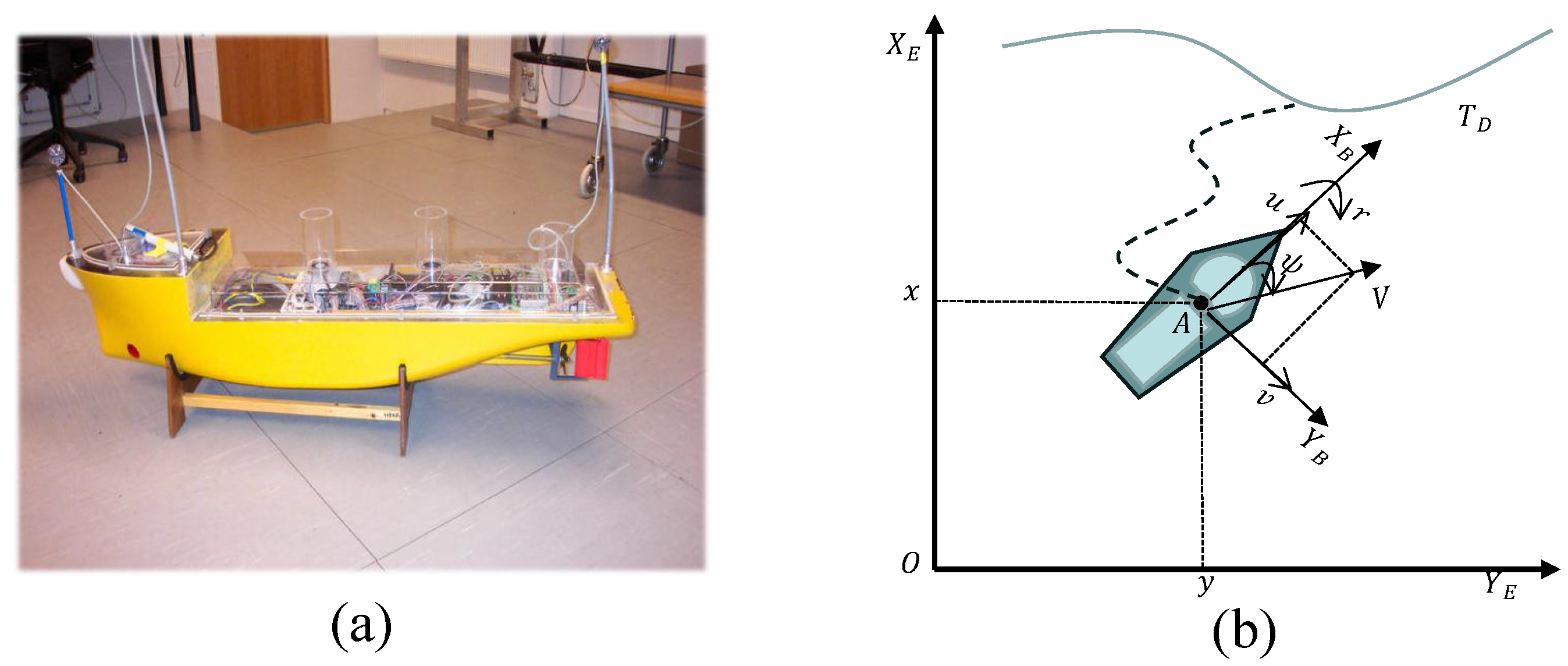
3]. The goal of single-USV trajectory tracking control is to guide and control a USV to arrive at a desired trajectory from any position and to navigate along the desired trajectory with minimal tracking error. It is worth mentioning that a given desired trajectory is a continuous curve composed of a series of waypoints with time constraints in an Earth coordinate system. As the complexity of tasks increases, deficiencies, such as the low efficiency and poor robustness of a single USV, gradually emerge. In order to further improve the efficiency of task completion, multiple USVs can be formed into a designed formation to execute tasks along the set trajectory, which greatly improves the efficiency of highly time-based tasks, such as regional searches.
As an extension of single-USV trajectory tracking control, multiple-USV cooperative trajectory tracking control limits the positioning among USVs by setting the desired navigation trajectory for each USV in advance, thus significantly reducing the task completion time and demonstrating advantages such as high accuracy and robustness. The cooperative trajectory tracking control scenario can be implemented using the formation control framework, and typical formation strategies include leader–follower formation framework, artificial potential field, behavior-based, virtual structure, and graph theory [
4,
5,
6,
7,
8]. Specifically, a distributed prescribed-time leader–follower formation control scheme for SUV in [
4], while meeting the predefined transient performance and overcoming the unknowns and input saturation. In [
5], the artificial potential function consisting of formation control term and target tracking term is established for multiple unmanned aerial vehicles, which achieves accurate formation. Considering the problems of unreachable targets and local minimums in artificial potential fields, ref. [
6] solves these problems by introducing behavior-based AUG formation control method. However, the disadvantage of this method is that it is difficult to describe the dynamic characteristics of the group, and difficult to control the stability of the formation. In [
7], a method of finite-time position and attitude tracking control method combined with artificial potential field and virtual structure is presented, which ensures that the AUVs avoid collisions with each other during the dive, and form and change the formation after reaching the set depth. However, due to the virtual structure method requiring the formation to maintain a rigid structure, its collision avoidance effect is poor. In [
8], a distance-based graph rigidity and affine transformation algorithm is used to control a fleet of AUVs to achieve any desired formation shape. Among the above control strategies, the leader–follower formation method is the most commonly referenced because of its simple structure and stable formation. We only need to strictly set the position difference between USVs while ensuring that the leader USV stably navigates along the set trajectory. Inspired by the leader–follower framework proposed in [
4], a simple and effective dual layer cooperative trajectory tracking framework is designed to simplify analysis in this paper.
During the process of tracking a desired trajectory, the designed tracking controller should have a fast and stable convergence speed. The common intelligent trajectory tracking control algorithms are as the following: sliding-mode control, backstepping, model predictive control, and fuzzy control. Among the above methods, the backstepping method has good tracking and control performance in ideal conditions, but its performance is poor in situations with unknown external disturbances. In comparison, the sliding-mode control method has the simplest structure, has excellent control performance, and is insensitive to disturbances that may exist [
9]. Therefore, as a theoretical basis, sliding-mode control has been widely improved and applied in the field of intelligent control of USVs. Typical improvement methods include integral sliding mode (ISM), terminal sliding mode (TSM), nonsingular terminal sliding mode (NTSM) and adaptive sliding mode scheme [
10,
11,
12,
13,
14]. The ISM scheme, as a fundamental and effective sliding mode control method, ensures the robustness of the system by determining the appropriate initial position to ensure that the system only has a sliding stage, which is widely used in USV control. In [
10], an improved integral sliding mode control attitude controller for AUV with model uncertainties and external disturbances is proposed to improve the ability of attitude tracking. However, due to its insensitivity to disturbances, the tracking performance is poor in non ideal environments. Compared with ISM, the TSM has the characteristics of finite time convergence and stable tracking. In [
11], a formation tracking control method for the operation of multiagent systems under disturbances is proposed based on the fast TSM scheme. It is worth mentioning that most TSM schemes cannot eliminate singularity. On the basis of TSM, a time-varying NTSM controller is designed to ensure the global robustness of the USV tracking system with respect to large uncertainties and unknown environmental disturbances in [
12]. Although this method effectively eliminates singularity, the convergence time is too dependent on the initial state of the system. In order to further improve the trajectory tracking accuracy in the presence of multiple disturbances, an adaptive sliding-mode unit vector control approach based on monitoring functions is proposed to handle disturbances of unknown bounds in [
13,
14]. The strategy is able to guarantee a pre-specified transient time, maximum overshoot, and steady-state error for multivariable uncertain plants, which verified its effectiveness in USV trajectory tracking control. It is worth mentioning that [
13] provides rigorous theoretical derivation on the proposed adaptive sliding mode strategy, which is lacking in this article and the proposed strategy in this article is more inclined towards application. Compared with other sliding mode methods, the ISM ensures that the system can only have a sliding stage by obtaining an appropriate initial position to ensure robustness. Nevertheless, the ISM has limitations in convergence speed and relies on the initial state of the trajectory tracking. Based on TIM scheme and fixed-time theory, a novel fast integral sliding mode strategy is designed to further optimize convergence speed and stability in this paper.
Due to the limitations of existing trajectory tracking control methods and navigation uncertainties, there is a significant error between the actual navigation path and the expected trajectory. To further improve the trajectory tracking accuracy, combinations of finite-time theory and intelligent control methods can significantly improve the tracking performance of single or multiple USVs [
15,
16,
17]. Nevertheless, finite-time theory cannot eliminate the impact of the initial state of a USV on control performance. To address this drawback, researchers have attempted to apply fixed-time control theory in multi-agent cooperative control to improve the control accuracy while reducing the dependence on the initial states [
18,
19], which was first proposed and rigorously proven in [
20]. Hence, the fixed-time theory was used to optimize the control performance of the sliding-mode control in this study, and then an efficient trajectory tracking controller was designed.
Actual ocean environments have various unknown disturbances, and due to the limitations of sea trials, it is not possible to identify all USV model parameters. Therefore, one must accurately identify the internal and external disturbances present in a tracking system before designing a trajectory tracking controller [
21]. The classical disturbance identification methods include active disturbance rejection control, neural network approximation, and Kalman filtering. Nevertheless, these methods have low disturbance processing accuracy and are prone to falling into local minima. On the basis of the above disturbance identification methods, disturbance observer technology has been proposed to identify unknown disturbances in the system and demonstrates excellent identification performance. In [
22], a nonlinear disturbance observer is designed to repair the velocity and position information of USVs disturbed by multiple types of noise. In order to perform mixed fault disturbance identification for USV with input saturation constraints, an accurate finite-time convergence observer was designed in [
23]. In [
24], an improved observer is proposed to observe and handle complex disturbances during USV navigation and control the underactuated USV to accurately track the desired trajectory. To further optimize disturbance identification performance, the idea of extended state observer (ESO) was proposed in [
25] and demonstrated excellent performance. For similar disturbance identification, a time-shifted sliding mode observer (SMO) is proposed to solve the problem of fault reconstruction in delayed systems in [
26], which utilizes the variation of constants formula to obtain the present time estimate of the unmeasured state, achieving excellent observation results. In [
27], a novel time shift approach for actuator fault reconstruction of systems with output time-delay based on a sliding mode observer is proposed to ensure that ideal sliding mode is made possible even in the presence of delay. Although the disturbance observer mentioned above can identify the disturbances present in the system, the identification accuracy of the above disturbance observer technologies will be affected by the initial observation state. Therefore, to further improve the disturbance identification performance and eliminate the impact of initial observation errors, we propose a modified disturbance observer based on fixed time control theory to accurately identify the disturbances existing in cooperative trajectory tracking system.
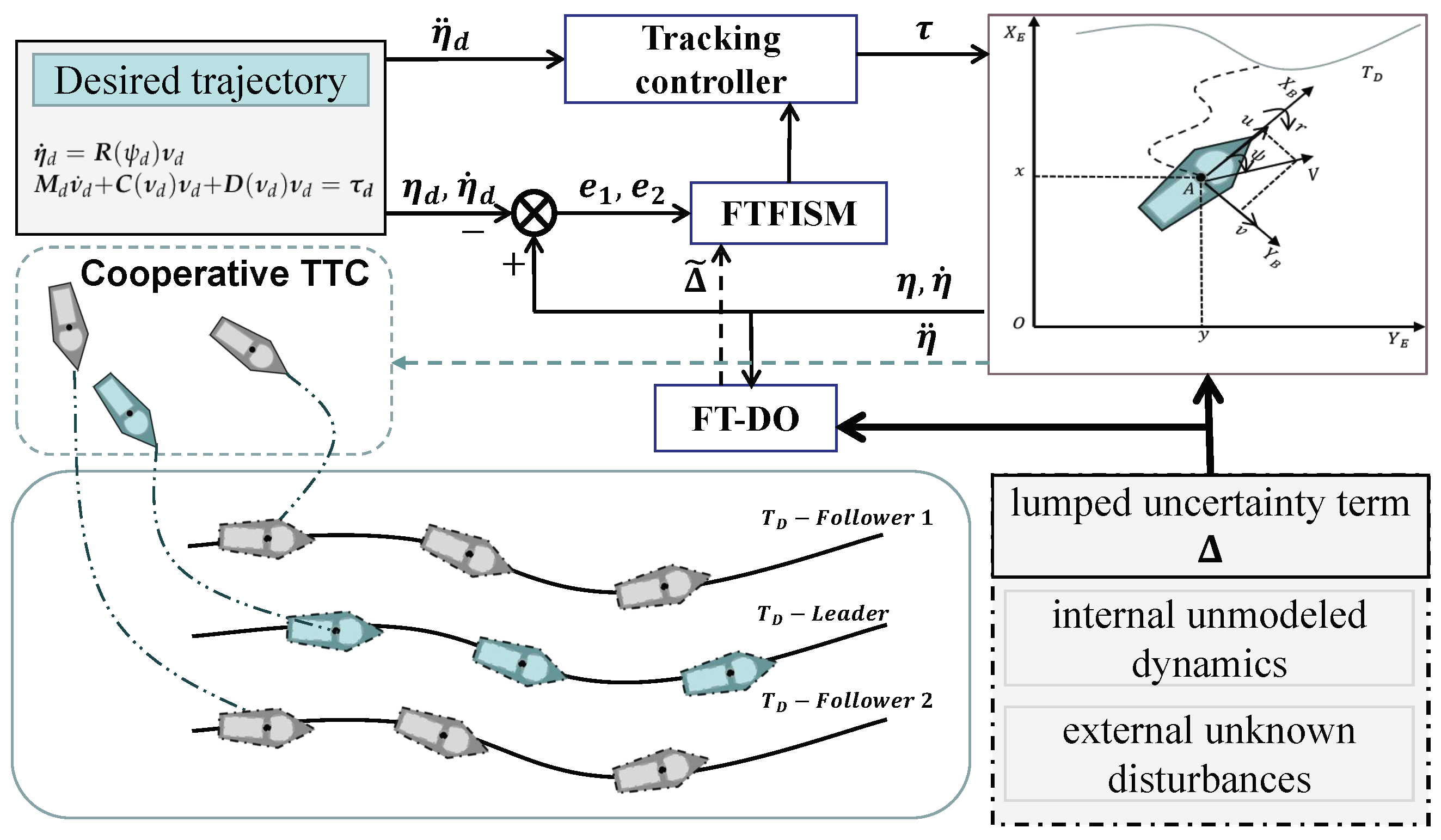
As mentioned above, in order to ensure that a USV can quickly track a set trajectory and accurately navigate along the desired trajectory with complex internal and external disturbances, a high-performance tracking controller and a high-precision disturbance observer are proposed in this study. Specifically, a modified fixed-time convergence disturbance observer (FT-DO) is proposed to achieve accurate identification of a lumped disturbance term in the tracking control system. Secondly, for a single-USV trajectory tracking control scenario, a reliable fixed-time-convergence fast integral sliding-mode trajectory tracking controller (FTFISM-TTC) is proposed to further improve the trajectory tracking accuracy and convergence speed. Then, a multiple-USV cooperative trajectory tracking controller was designed to demonstrate the scalability of the proposed algorithm. Finally, rigorous theoretical proof and a comprehensive simulation analysis are used to prove that the FTFISM-TTC is superior to the backstepping and TSM in [
28]. Compared with the previous works, the main innovations of this paper are as follows.
(1) The internal unknown parameter disturbances and external ocean disturbances present in the trajectory tracking control system were considered as a lumped disturbance term. Then, a high-precision fixed-time-convergence disturbance observer (FT-DO) was designed to accurately identify the lumped disturbance term in real time and effectively eliminate the impact of initial errors on the identification accuracy.
(2) After the lumped disturbance term was eliminated, the FTFISM-TTC was proposed to ensure that a USV could quickly navigate to the set trajectory and to ensure stable movement along the current trajectory, while effectively eliminated the dependence of the tracking control accuracy on the initial state. Then, the trajectory tracking control of a single USV was extended to multiple-USV cooperative tracking control within the leader–follower framework, which further verified the scalability and effectiveness of the proposed FTFISM-TTC strategy.
(3) By designing appropriate Lyapunov functions to rigorously analyze the tracking control strategy, the reliability of the designed FT-DO and FTFISM-TTC was proved. At the same time, through comprehensive simulation and comparison experiments in Matlab, the excellent control performance of FT-DO and FTFISM-TTC was further verified.
The structure of the content is as follows: The basic lemmas and mathematical model of USV trajectory tracking are introduced in
Section 2.
Section 3 describes the design of the FT-DO and FTFISM-TTC, and it provides detailed theoretical derivations and proof of stability. Multiple comprehensive simulation and comparison experiments are described in
Section 4.
Section 5 provides a detailed summary.
4. Simulations and Discussion
Through rigorous theoretical derivations, the stability of the proposed FT-DO and FTFISM-TTC was clearly demonstrated. Nevertheless, due to constraints such as actuator saturation and input constraints in the actual environment of USVs, it is impossible to arbitrarily adjust the convergence time. Therefore, there is actually a minimum lower bound for this convergence according to the maximum output of the actuator.
This section describes rigorous simulations that were conducted to verify the reliability of the designed FT-DO and FTFISM-TTC. The parameters of the FT-DO and FTFISM-TTC are shown in
Table 2. The parameters of the Cybership II USV model [
34] are shown in
Table 3, as this was selected for the simulation experiments due to its relatively complete model parameters.
To ensure disturbance uncertainty, the following disturbances were set separately:
The specific results of the comparative simulation experiments are shown in
Figure 3,
Figure 4,
Figure 5,
Figure 6,
Figure 7,
Figure 8,
Figure 9,
Figure 10,
Figure 11,
Figure 12,
Figure 13,
Figure 14 and
Figure 15.
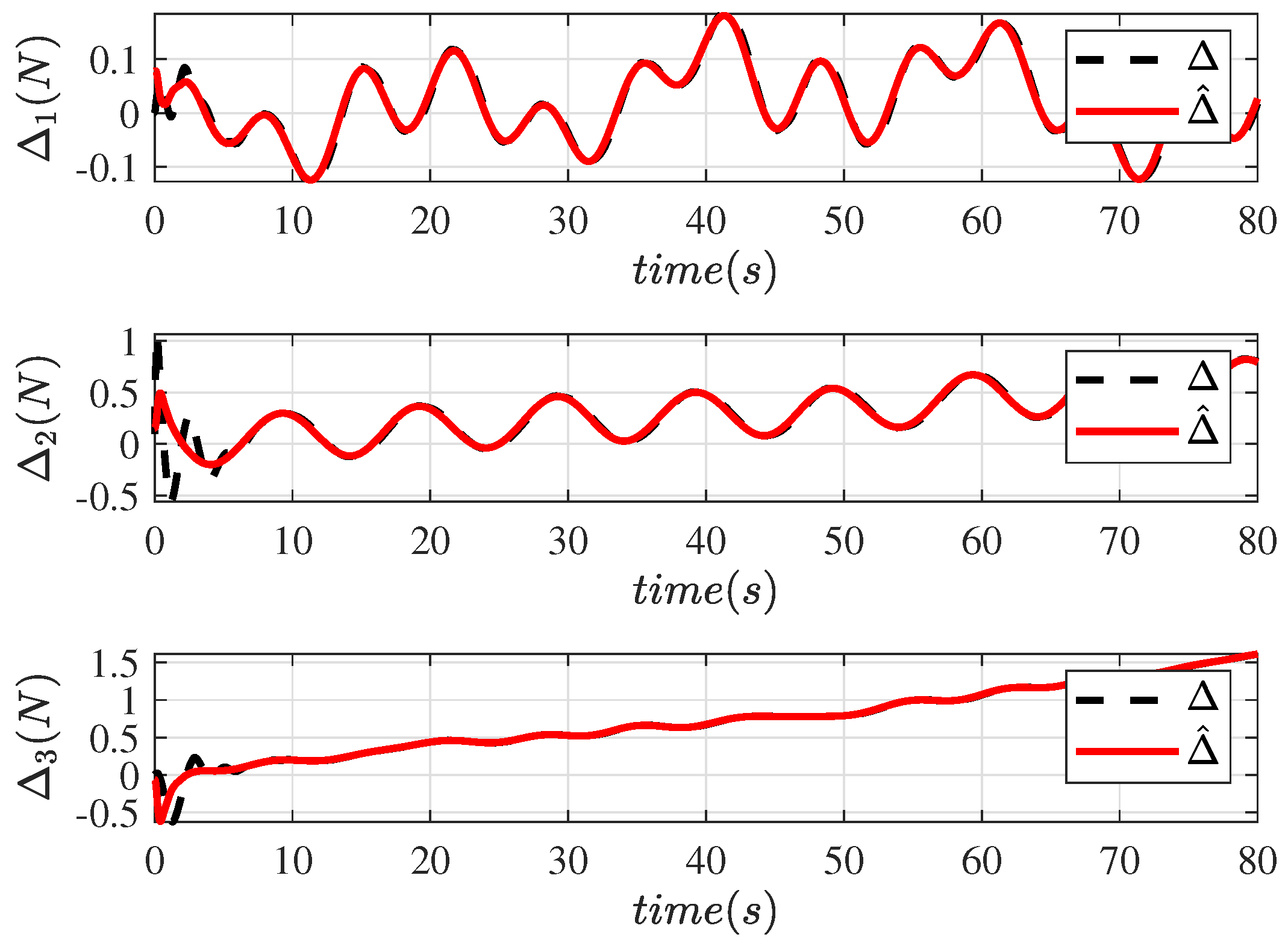
Figure 3,
Figure 4,
Figure 5 and
Figure 6 show the disturbance observation performance of the proposed FT-DO, which demonstrated that the designed FT-DO could quickly and accurately handle the lumped uncertainty terms
and
. Specifically, in
Figure 3 and
Figure 5, the black line represents the actual set disturbance curve, and the other line is the observation of the FT-DO, which clearly demonstrates that the designed FT-DO could stably identify disturbances in real time.
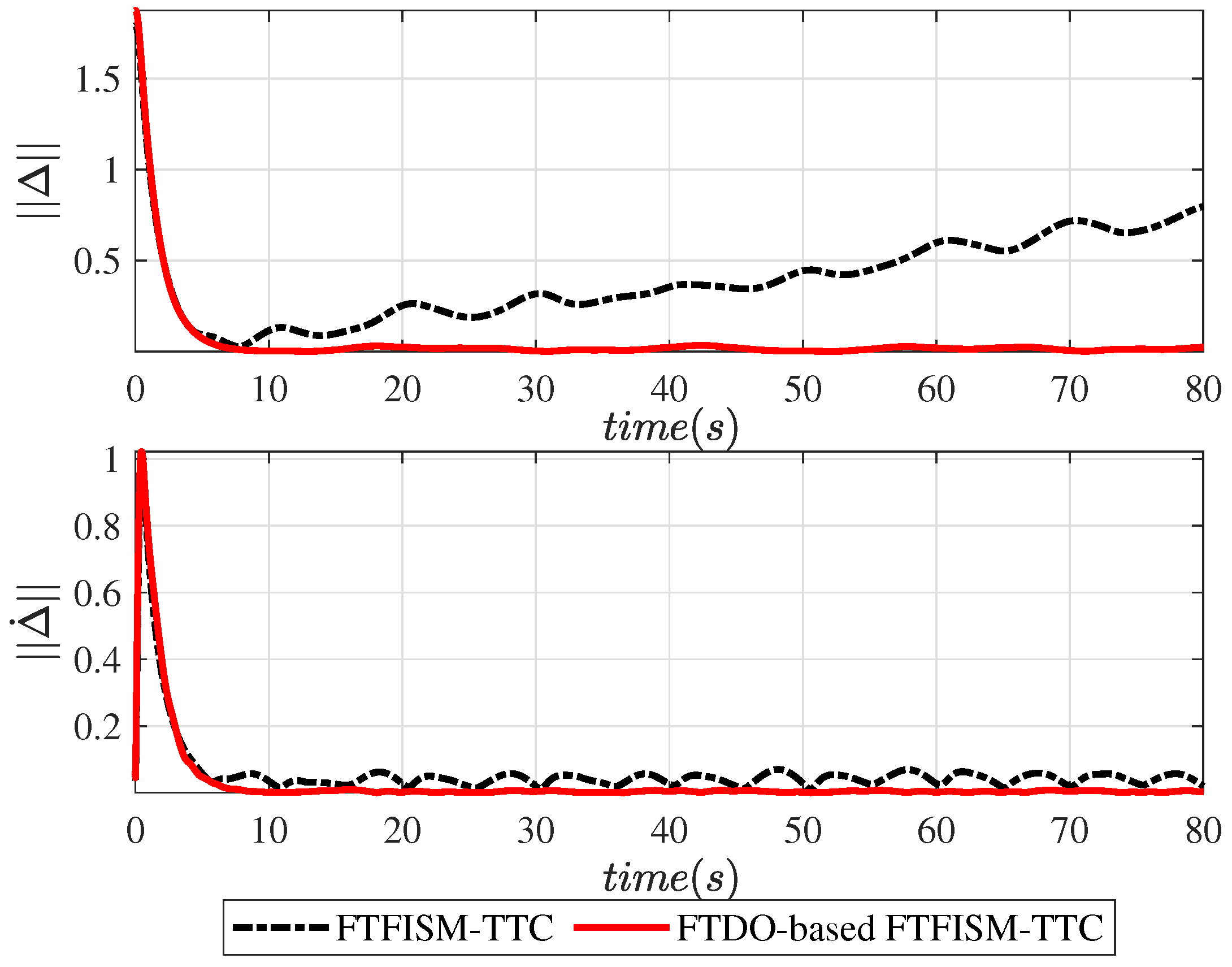
To further demonstrate the superiority of the designed disturbance observer, the norms of the disturbance identification errors are shown in
Figure 4 and
Figure 6. the black line represents the trajectory tracking error curve without disturbance processing, and the red line represents the tracking control effect after the disturbance was identified by FT-DO. The error level is shown in
Table 4, which further demonstrates the excellent disturbance identification ability of the proposed FT-DO.
In order to verify the excellent performance of the designed single-USV trajectory tracking controller (FTFISM-TTC), the initial states of the desired trajectories and the USV are shown in
Table 5, and the desired trajectories
were set as follows:
Figure 7,
Figure 8,
Figure 9,
Figure 10,
Figure 11 and
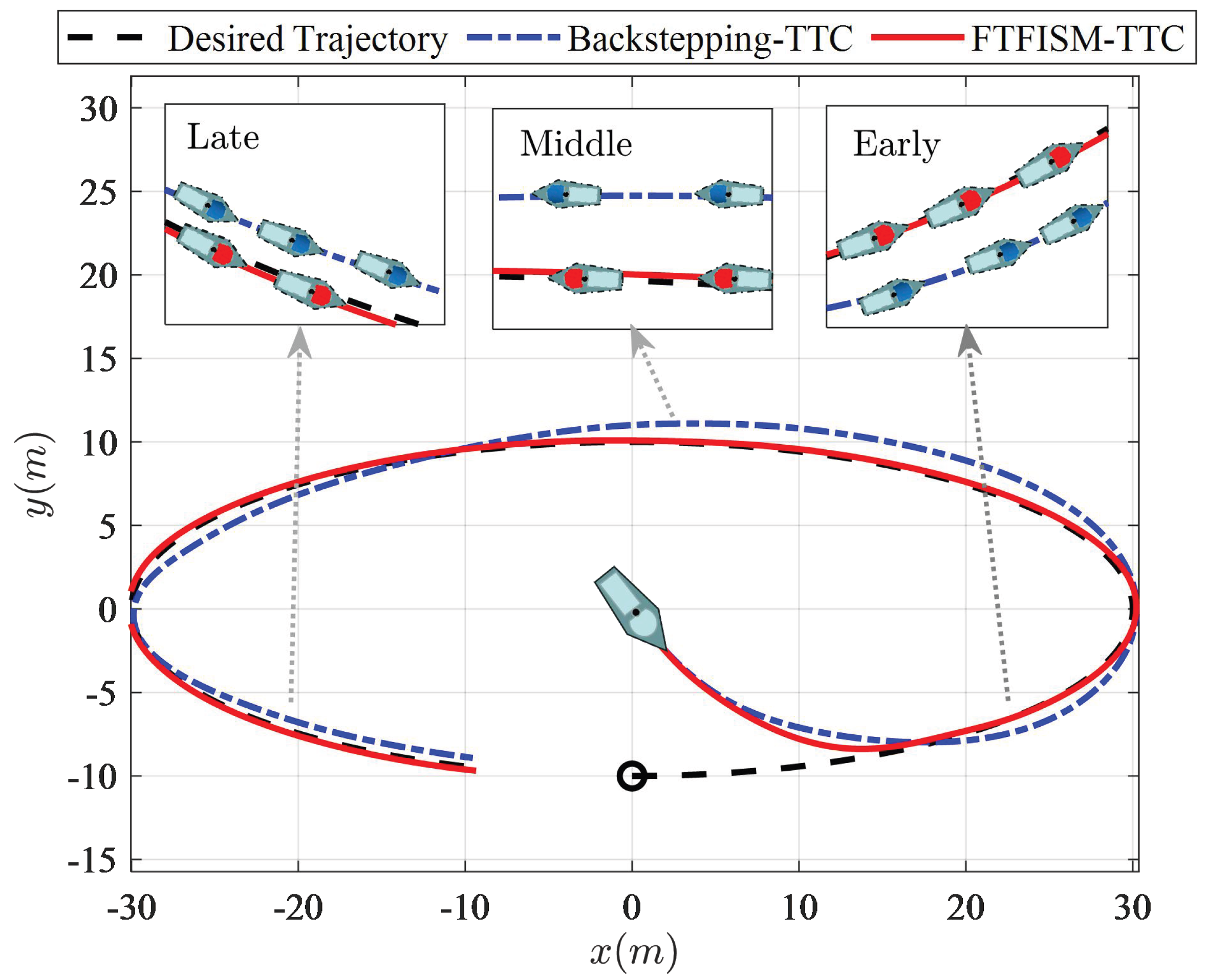
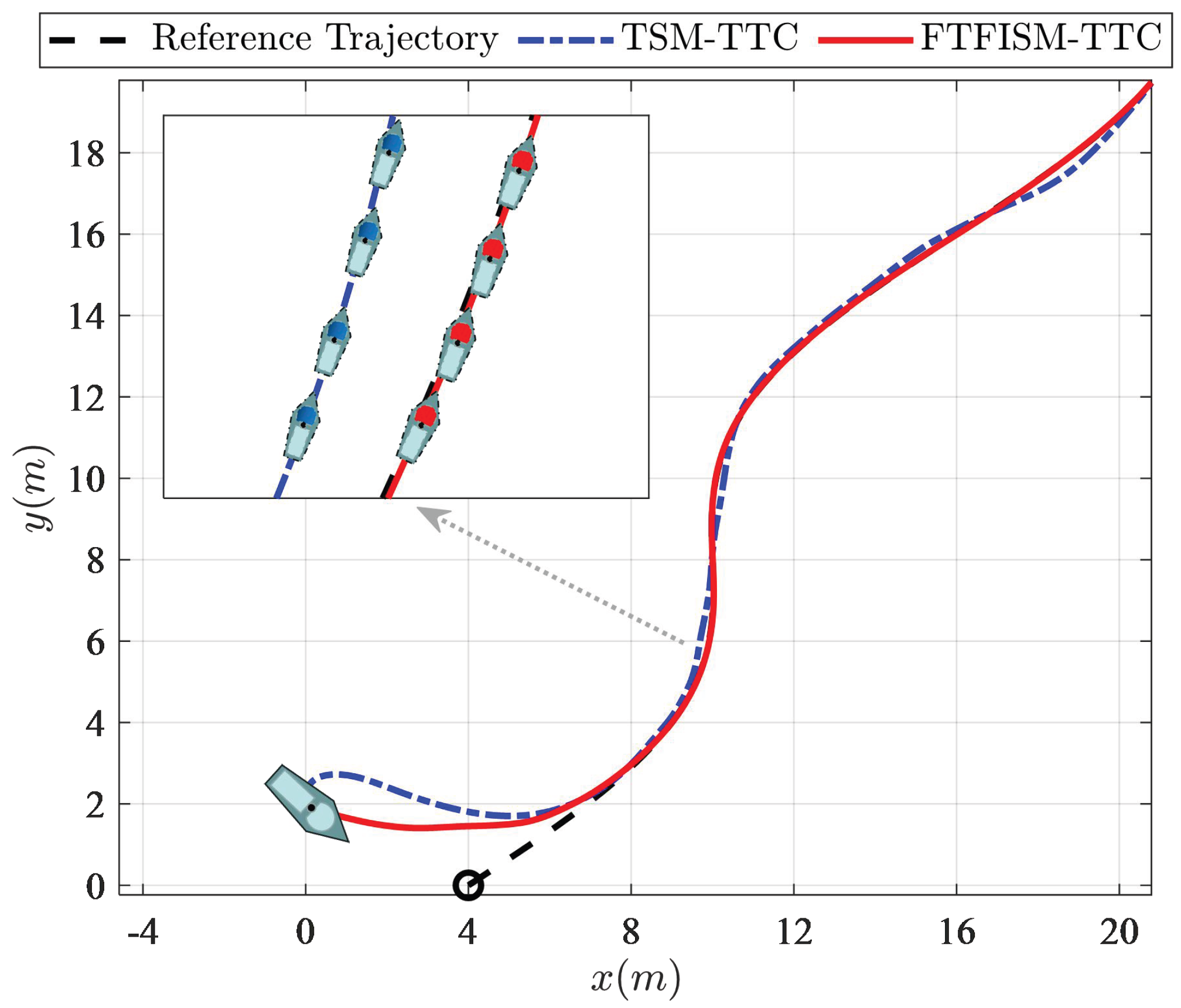
Figure 12 show the comprehensive results of the simulation experiments on the FTFISM-TTC with the TSM-TTC and backstepping-TTC [
25]. Specifically, in
Figure 7 and
Figure 10, the blue line is the tracking curve obtained with the TSM-TTC strategy and backstepping-TTC strategy, and the red line is the tracking curve obtained with the FTFISM-TTC strategy. The results show that backstepping strategy and the TSM-TTC strategy could not effectively track the expected trajectory in real time, and the proposed FTFISM-TTC had excellent tracking performance.
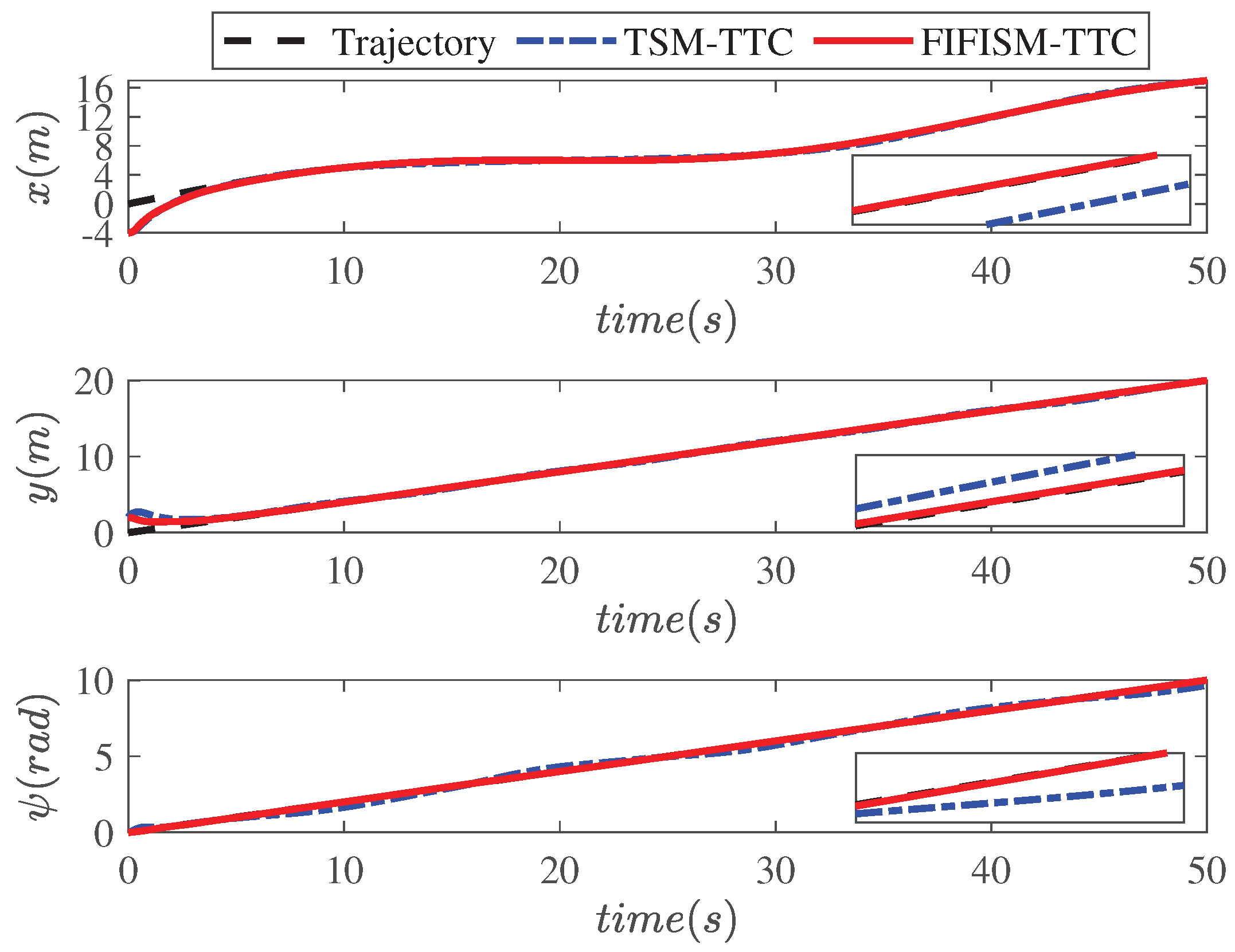
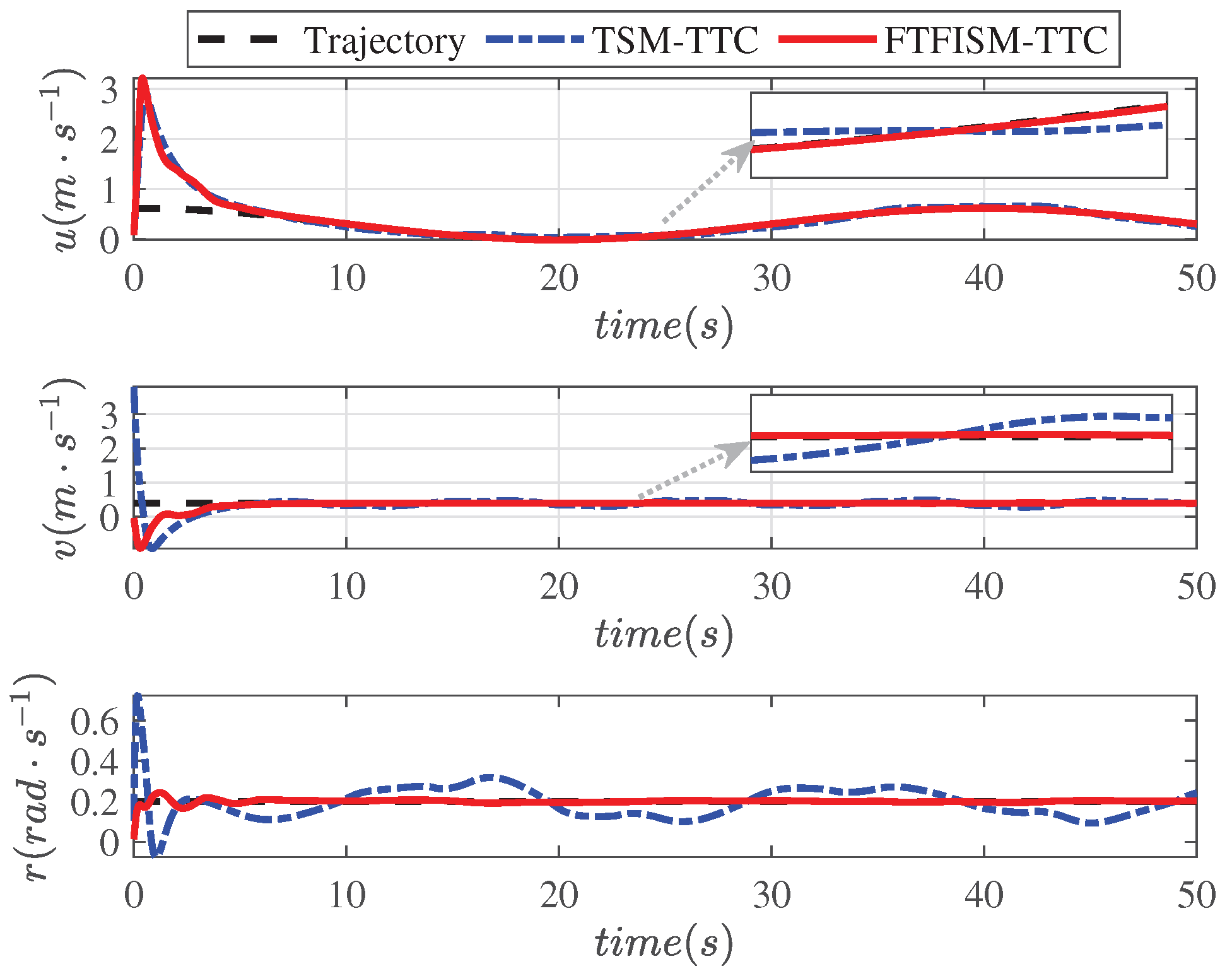
To clearly demonstrate the differences in the tracking performance of different tracking control algorithms in different dimensions,
Figure 8Figure 9,
Figure 11, and
Figure 12 show the tracking effects on different tracking velocity and tracking position dimensions with the state-of-the-art methods and the proposed FTFISM-TTC strategy, clearly indicating that the FTFISM-TTC had more reliable tracking performance than that of TSM-TTC and backstepping-TTC.
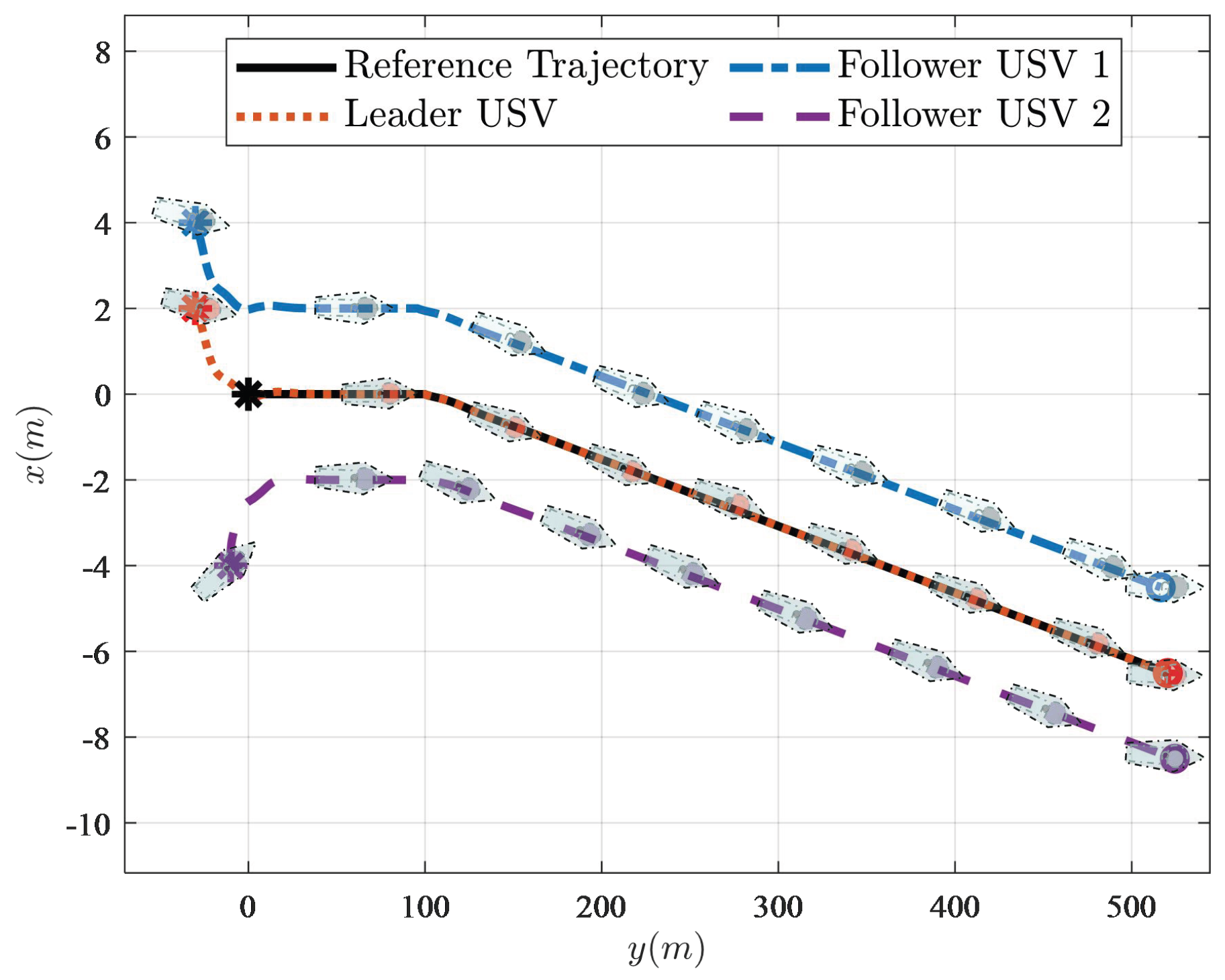
To further verify the scalability of the designed FTFISM-TTC,
Figure 13 demonstrates that three USVs could continuously maintain the desired formation to achieve precise cooperative trajectory tracking. Specifically, after the leader USV navigated to the desired trajectory, the follower USVs quickly moved to the set position to ensure the desired triangular formation and steadily navigated along the desired trajectory, thus exhibiting the excellent cooperative trajectory tracking control performance of the proposed FTDO-based FTFISM-TTC strategy. The initial states of the desired trajectories and USVs are shown in
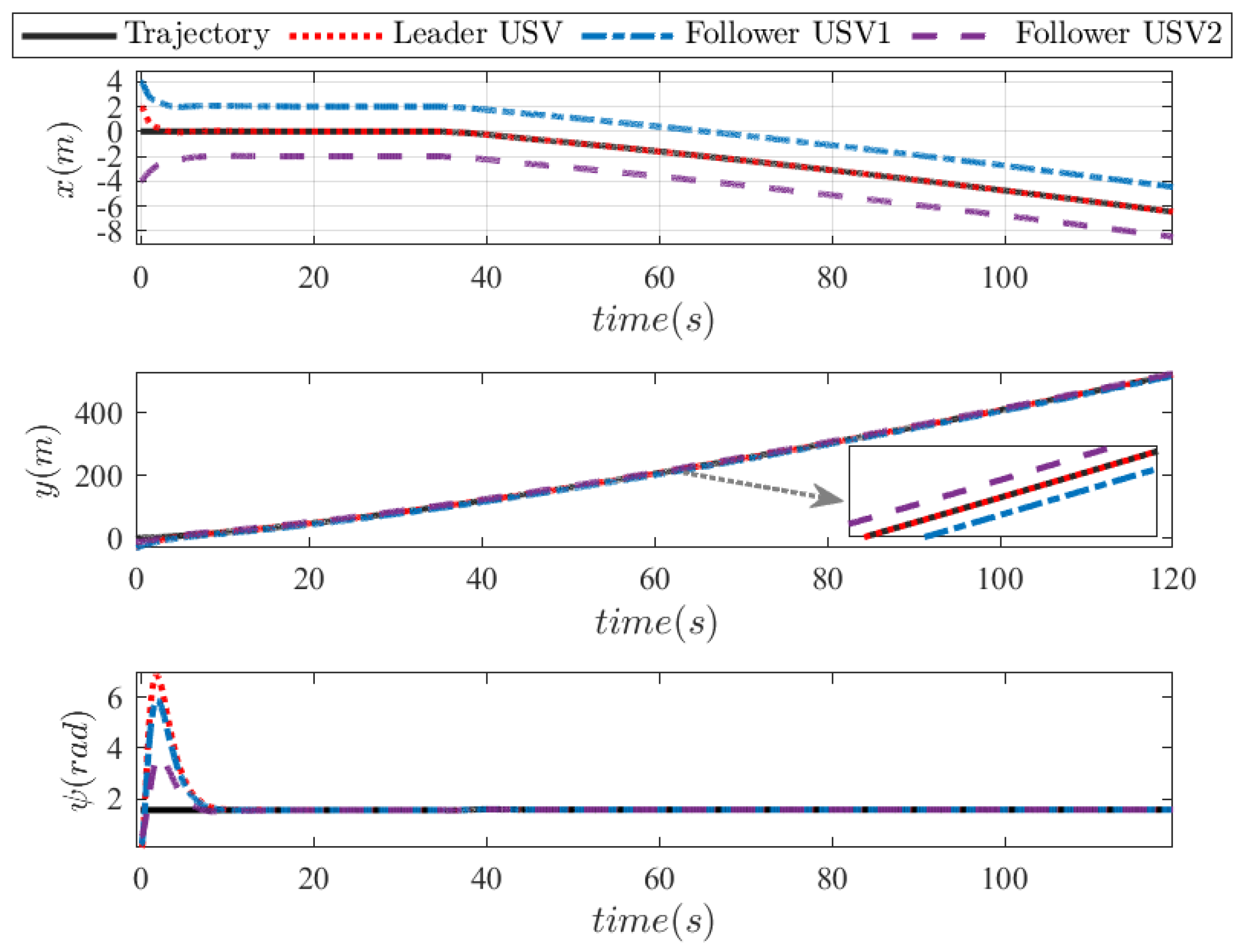
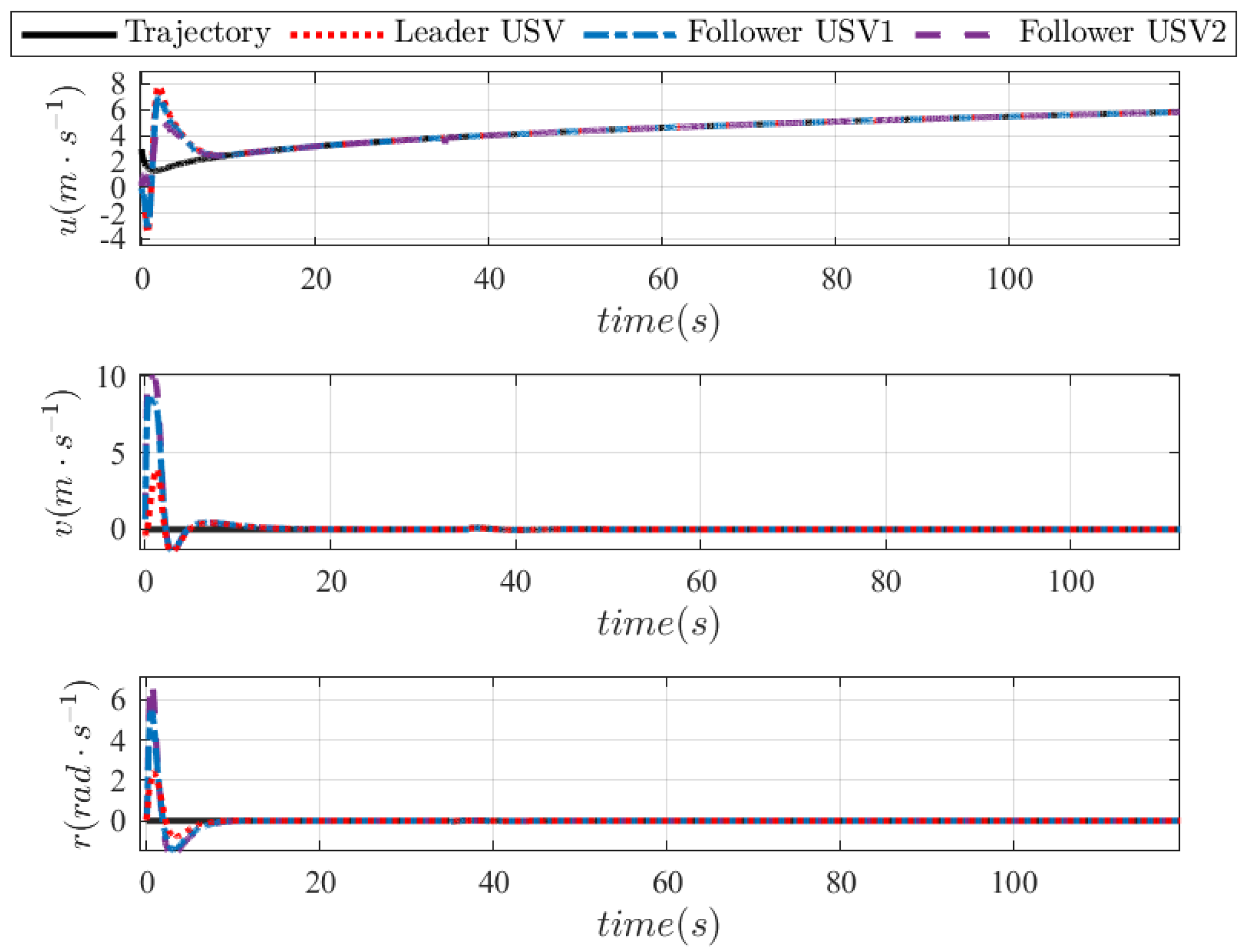
Table 6. For further analysis,
Figure 14 and
Figure 15 show the detailed position tracking curves and velocity tracking curves during cooperative trajectory tracking control, which effectively verified that the proposed FTDO-based FTFISM-TTC had strong robustness and could stably expand to the collaborative control of multiple USVs. It is worth emphasizing that the FT-DO and FTFISM-TTC proposed in this article have excellent disturbance identification ability and precise trajectory tracking performance, but still have the following limitations: due to the rigid structure limitations of the leader–follower cooperative trajectory tracking framework, the overall formation lacks flexibility, and the scalability of the algorithm needs to be further improved. Secondly, the disturbance settings in this article have certain limitations, as there are various static and dynamic obstacles that cannot be ignored in the actual marine environment, which seriously affect the safe navigation of the USV. This article provides a great research direction for precise trajectory tracking of USVs.






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}