
Stereo Matching Algorithm of Multi-Feature Fusion Based on Improved Census Transform

Abstract
:1. Introduction
2. Principle and Method
2.1. Matching Cost Calculation
2.1.1. Traditional Matching Cost Calculation
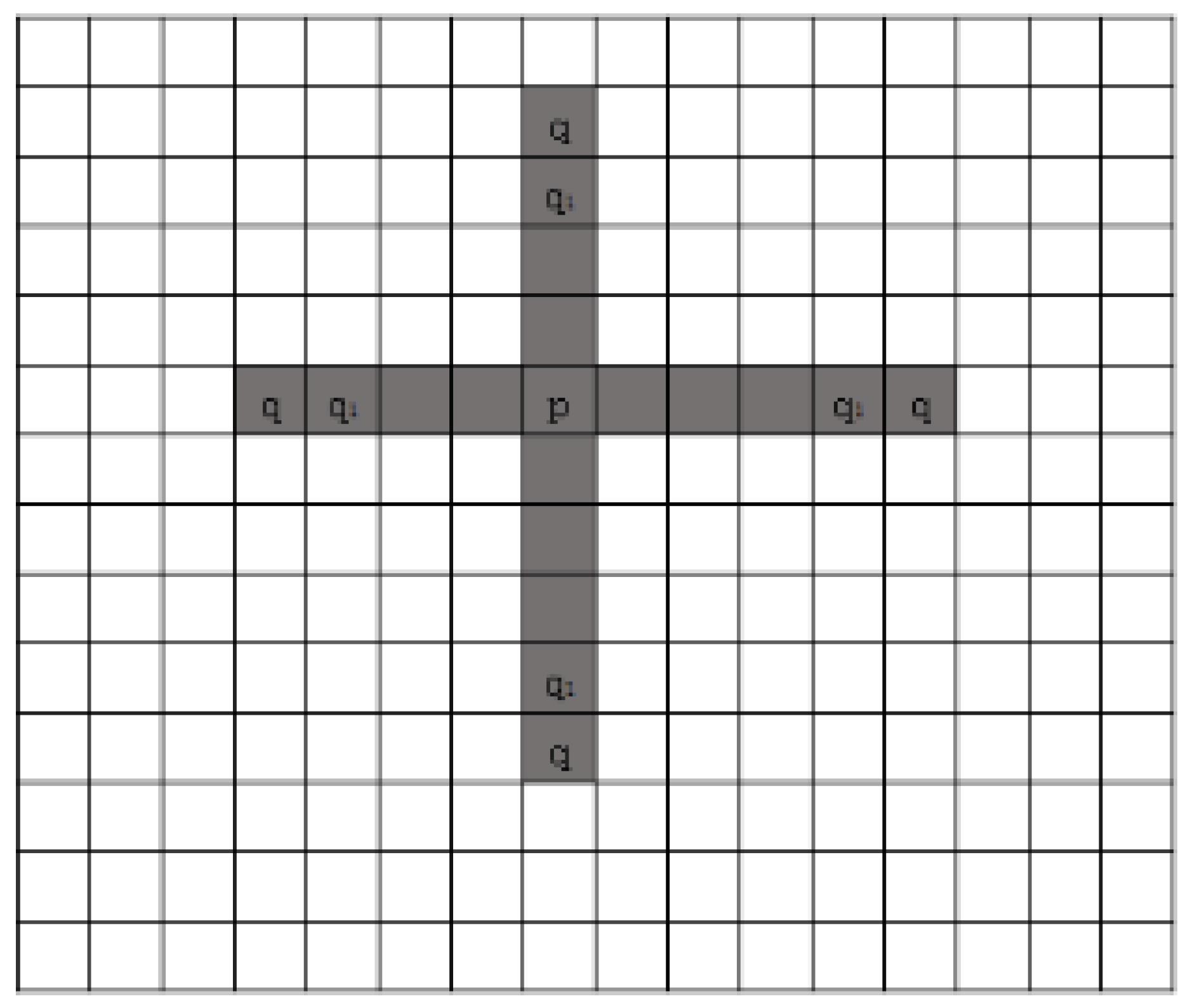
2.1.2. Improved Matching Cost Calculation
2.2. Cost Aggregation
2.3. Disparity Calculation
3. Data and Experiments
3.1. Anti-Noise Experiment
3.2. Comparison of Final Disparity Map Results
3.3. The Overall Performance Test of the Algorithm
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Humenberger, M.; Engelke, T.; Kubinger, W. A Census-Based Stereo Vision Algorithm Using Modified Semi-Global Matching and Plane Fitting to Improve Matching Quality. In Proceedings of the 2010 IEEE Computer Society Conference on Computer Vision and Pattern Recognition-Workshops, San Francisco, CA, USA, 13–18 June 2010; pp. 77–84. [Google Scholar]
- Cyganek, B.; Siebert, J.P. An Introduction to 3D Computer Vision Techniques and Algorithms; John Wiley & Sons: Hoboken, NJ, USA, 2009. [Google Scholar]
- Zhang, K.; Lu, J.; Lafruit, G. Cross-Based Local Stereo Matching Using Orthogonal Integral Images. IEEE Trans. Circuits Syst. Video Technol. 2009, 19, 1073–1079. [Google Scholar] [CrossRef]
- Do, P.N.B.; Nguyen, Q.C. A Review of Stereo-Photogrammetry Method for 3-D Reconstruction in Computer Vision. In Proceedings of the 2019 19th International Symposium on Communications and Information Technologies (ISCIT), Ho Chi Minh City, Vietnam, 25–27 September 2019; pp. 138–143. [Google Scholar]
- Scharstein, D.; Szeliski, R. A Taxonomy and Evaluation of Dense Two-Frame Stereo Correspondence Algorithms. Int. J. Comput. Vis. 2002, 47, 7–42. [Google Scholar] [CrossRef]
- Yang, Q. A non-local cost aggregation method for stereo matching. In Proceedings of the 2012 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Providence, RI, USA, 16–21 June 2012; pp. 1402–1409. [Google Scholar]
- Kordelas, G.A.; Alexiadis, D.S.; Daras, P.; Izquierdo, E. Enhanced disparity estimation in stereo images. Image Vis. Comput. 2015, 35, 31–49. [Google Scholar] [CrossRef]
- Veksler, O. Stereo Correspondence by Dynamic Programming on a Tree. In Proceedings of the 2005 IEEE Computer Society Conference on Computer Vision and Pattern Recognition (CVPR’05), San Diego, CA, USA, 20–25 June 2005; Volume 2, pp. 384–390. [Google Scholar]
- Felzenszwalb, P.F.; Huttenlocher, D.P. Efficient Belief Propagation for Early Vision. Int. J. Comput. Vis. 2006, 70, 41–54. [Google Scholar] [CrossRef]
- Kolmogorov, V.; Zabih, R. Computing visual correspondence with occlusions using graph cuts. In Proceedings of the 8th IEEE International Conference on Computer Vision, Vancouver, BC, Canada, 7–14 July 2001; Volume 2, pp. 508–515. [Google Scholar]
- Min, D.; Lu, J.; Do, M.N. Joint Histogram-Based Cost Aggregation for Stereo Matching. IEEE Trans. Pattern Anal. Mach. Intell. 2015, 35, 2539–2545. [Google Scholar] [CrossRef]
- Zhou, X.; Boulanger, P. Radiometric invariant stereo matching based on relative gradients. In Proceedings of the 2012 19th IEEE International Conference on Image Processing (ICIP 2012), Orlando, FL, USA, 30 September–3 October 2012; pp. 2989–2992. [Google Scholar]
- Zhang, K.; Lu, J.; Lafruit, G.; Lauwereins, R.; Van Gool, L. Robust stereo matching with fast Normalized Cross-Correlation over shape-adaptive regions. In Proceedings of the 2009 16th IEEE International Conference on Image Processing, Cairo, Egypt, 7–10 November 2009; pp. 2357–2360. [Google Scholar]
- Zabih, R.; Woodfill, J. Non-parametric local transforms for computing visual correspondence. In Lecture Notes in Computer Science; Springer: Berlin/Heidelberg, Germany, 1994; pp. 151–158. [Google Scholar]
- Zhicheng, G.; Jianwu, D.; Yangping, W.; Jing, J. Multi-feature background modeling algorithm based on improved Census transform. Acta Optica Sin. 2019, 39, 216–224. [Google Scholar] [CrossRef]
- Ma, J.; Jiang, X.; Fan, A.; Jiang, J.; Yan, J. Image matching from handcrafted to deep features: A survey. Int. J. Comput. Vis. 2019, 129, 23–79. [Google Scholar] [CrossRef]
- Liu, H.; Wang, R.; Xia, Y.; Zhang, X. Improved Cost Computation and Adaptive Shape Guided Filter for Local Stereo Matching of Low Texture Stereo Images. Appl. Sci. 2020, 10, 1869–1876. [Google Scholar] [CrossRef]
- Zin, T.; Nakahara, Y.; Yamaguchi, T.; Ikehara, M. Improved image denoising via RAISR with fewer filters. Comput. Vis. Media 2021, 7, 499–511. [Google Scholar] [CrossRef]
- Hou, Y.; Liu, C.; An, B.; Liu, Y. Stereo matching algorithm based on improved Census transform and texture filtering. Optik 2022, 249, 168186. [Google Scholar] [CrossRef]
- Mei, X.; Sun, X.; Zhou, M. On building an accurate stereo matching system on graphics hardware. In Proceedings of the 2011 IEEE International Conference on Computer Vision Workshops (ICCV Workshops), Barcelona, Spain, 6–13 November 2011; pp. 467–474. [Google Scholar] [CrossRef]
- Lv, C.; Li, J.; Kou, Q.; Zhuang, H.; Tang, S. Stereo Matching Algorithm Based on HSV Color Space and Improved Census Transform. Math. Probl. Eng. 2021, 2021, 1857327. [Google Scholar] [CrossRef]
- Lee, J.; Jun, D.; Eem, C.; Hong, H. Improved census transform for noise robust stereo matching. Opt. Eng. 2016, 55, 63107. [Google Scholar] [CrossRef]
- Liu, C.; Cheng, S.; Chen, C.; Qiao, M.; Zhang, W.; Shah, A.; Bai, W.; Arcucci, R. M-FLAG: Medical Vision-Language Pre-training with Frozen Language Models and Latent Space Geometry Optimization. In Proceedings of the International Conference on Medical Image Computing and Computer-Assisted Intervention—MICCAI 2023, Vancouver, BC, Canada, 8–12 October 2023; pp. 637–647. [Google Scholar]
- Cheng, S.; Quilodrán-Casas, C.; Ouala, S.; Farchi, A.; Liu, C.; Tandeo, P.; Fablet, R.; Lucor, D.; Iooss, B.; Brajard, J.; et al. Machine Learning with Data Assimilation and Uncertainty Quantification for Dynamical Systems: A Review. IEEE J. Autom. Sin. 2023, 10, 1361–1387. [Google Scholar] [CrossRef]
- Chang, X.; Zhou, Z.; Wang, L.; Shi, Y.; Zhao, Q. Real-Time Accurate Stereo Matching Using Modified Two-Pass Aggregation and Winner-Take-All Guided Dynamic Programming. In Proceedings of the 2011 International Conference on 3D Imaging, Modeling, Processing, Visualization and Transmission (3DIMPVT), Hangzhou, China, 16–19 May 2011; pp. 73–79. [Google Scholar]
- Lazaros, N.; Sirakoulis, G.C.; Gasteratos, A. Review of Stereo Vision Algorithms: From Software to Hardware. Int. J. Optomechatronics 2008, 2, 435–462. [Google Scholar] [CrossRef]
- Pan, X.; Jun, G.; Xu, Y.; Xu, Z.; Li, T.; Huang, J.; Qiao, W. Improved Census Transform Method for Semi-Global Matching Algorithm. In Proceedings of the 2021 26th International Conference on Automation and Computing (ICAC), Portsmouth, UK, 2–4 September 2021; pp. 1–6. [Google Scholar]
- Ma, L.; Li, J.; Ma, J.; Zhang, H. A Modified Census Transform Based on the Neighborhood Information for Stereo Matching Algorithm. In Proceedings of the 2013 Seventh International Conference on Image and Graphics (ICIG), Qingdao, China, 26–28 July 2013; pp. 533–538. [Google Scholar]
- Garnett, R.; Huegerich, T.; Chui, C.; He, W. A universal noise removal algorithm with an impulse detector. IEEE Trans. Image Process. 2005, 11, 1747–1754. [Google Scholar] [CrossRef] [PubMed]
- Scharstein, D.; Szeliski, R. High-accuracy stereo depth maps using structured light. In Proceedings of the CVPR 2003: Computer Vision and Pattern Recognition Conference, Madison, WI, USA, 18–20 June 2003; pp. 195–202. [Google Scholar]
- Scharstein, D.; Pal, C. Learning Conditional Random Fields for Stereo. In Proceedings of the 2007 IEEE Conference on Computer Vision and Pattern Recognition, Minneapolis, MN, USA, 17–22 June 2007; pp. 1–8. [Google Scholar]
- Hirschmuller, H.; Scharstein, D. Evaluation of Cost Functions for Stereo Matching. In Proceedings of the IEEE Conference on CVPR, Minneapolis, MN, USA, 17–22 June 2007. [Google Scholar]
- Hirschmuller, H. Stereo Processing by Semiglobal Matching and Mutual Information. IEEE Trans. Pattern Anal. Mach. Intell. 2007, 30, 328–341. [Google Scholar] [CrossRef] [PubMed]
- Shen, S. Accurate Multiple View 3D Reconstruction Using Patch-Based Stereo for Large-Scale Scenes. IEEE Trans. Image Process. 2013, 22, 1901–1914. [Google Scholar] [CrossRef] [PubMed]
- Wang, L.; Yang, R. Global stereo matching leveraged by sparse ground control points. In Proceedings of the 2011 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Colorado Springs, CO, USA, 20–25 June 2011; pp. 3033–3040. [Google Scholar]
- Yoon, K.-J.; Kweon, I.S. Adaptive support-weight approach for correspondence search. IEEE Trans. Pattern Anal. Mach. Intell. 2006, 28, 650–656. [Google Scholar] [CrossRef] [PubMed]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Algorithm | No Noise | Salt and Pepper Noise (%) | Gaussian Noise () | ||||||
|---|---|---|---|---|---|---|---|---|---|
| 2 | 5 | 10 | 15 | 2 | 4 | 6 | 8 | ||
| MCT | 4.31 | 5.13 | 6.16 | 8.81 | 13.14 | 5.22 | 6.58 | 8.88 | 11.01 |
| SGM | 5.37 | 6.21 | 7.75 | 10.79 | 17.68 | 6.81 | 9.36 | 12.03 | 14.97 |
| Proposed algorithm | 3.99 | 4.33 | 4.87 | 5.97 | 7.31 | 4.67 | 6.21 | 7.83 | 9.92 |
| Algorithm | Tsukuba | Venus | Teddy | Cones | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| N-Occ | All | Disc | N-Occ | All | Disc | N-Occ | All | Disc | N-Occ | All | Disc | |
| SSD+MF | 5.23 | 7.27 | 24.21 | 3.68 | 5.13 | 11.8 | 16.50 | 24.74 | 32.84 | 10.99 | 19.85 | 26.21 |
| RINCensus | 4.78 | 6.00 | 14.45 | 1.11 | 1.76 | 7.91 | 9.76 | 17.31 | 26.12 | 8.09 | 16.20 | 14.90 |
| GlobalGCP | 0.87 | 2.54 | 4.69 | 0.46 | 0.53 | 2.22 | 6.44 | 11.50 | 16.20 | 3.59 | 9.49 | 8.90 |
| AdaptWeight | 1.38 | 1.85 | 6.90 | 0.71 | 1.19 | 6.13 | 7.88 | 13.30 | 18.60 | 3.97 | 9.79 | 8.26 |
| Proposed algorithm | 1.27 | 1.93 | 5.62 | 0.68 | 0.78 | 4.06 | 6.23 | 10.41 | 14.31 | 3.31 | 9.03 | 7.99 |
| Algorithm | SSD + MF | GlobalGCP | AdaptWeight | RINCensus | Proposed algorithm |
| AverageMismatch rate | 15.70 | 10.69 | 5.61 | 6.66 | 5.53 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhou, Z.; Pang, M. Stereo Matching Algorithm of Multi-Feature Fusion Based on Improved Census Transform. Electronics 2023, 12, 4594. https://doi.org/10.3390/electronics12224594
Zhou Z, Pang M. Stereo Matching Algorithm of Multi-Feature Fusion Based on Improved Census Transform. Electronics. 2023; 12(22):4594. https://doi.org/10.3390/electronics12224594
Chicago/Turabian StyleZhou, Ziqi, and Mao Pang. 2023. "Stereo Matching Algorithm of Multi-Feature Fusion Based on Improved Census Transform" Electronics 12, no. 22: 4594. https://doi.org/10.3390/electronics12224594
APA StyleZhou, Z., & Pang, M. (2023). Stereo Matching Algorithm of Multi-Feature Fusion Based on Improved Census Transform. Electronics, 12(22), 4594. https://doi.org/10.3390/electronics12224594